

































您还有0次抽奖机会
锤子
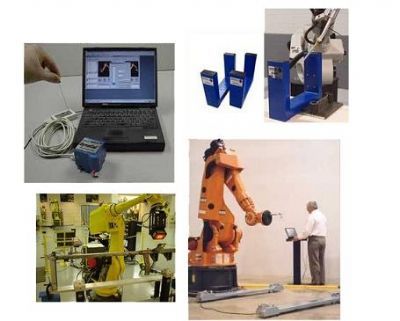
制造商们越来越依赖工业机器人,来提高生产过程中所需的灵活性和适应性。尽管如此,让这些机器人高效、精准地执行他们的生产任务,需要花费大量时间和精力去手动编程,从而导致灵活性丧失。而DynaCal-lite机器人标定系统正是针对机器人应用过程中精度偏离而研发的一种解决方案。 实际生产出来的机器人与设计的机器人存在某些偏离,从而导致机器人在实际应用过程中精度达不到要求。通过校准机器人的DH参数(机器人TCP点、home点、连杆长度、机器人各轴夹角、检测机器人关节齿轮间隙、减速比等,并上传控制器进行补偿)来提高机器人本体精度以至于适合更多高精度应用。
打开失败或需在电脑查看,请在电脑上的资料中心栏目,点击"我的下载"。建议使用手机自带浏览器。
