是什么让蜘蛛侠能够飞檐走壁?又是什么让年逾50的阿汤哥只身一人攀爬世界第一高楼——哈利法塔?尽管这些是科幻电影中的片段,但现实生活中早已有活生生的例子:壁虎。该生物不仅在洁净基底上具有超强黏附力,同时在沾满灰尘的表面依旧能够自由爬行,表明其黏附系统具有“自清洁”功能。有研究指出,壁虎之所以具有如此优异的功能是因为其脚趾具有成千上万的铲状绒毛。
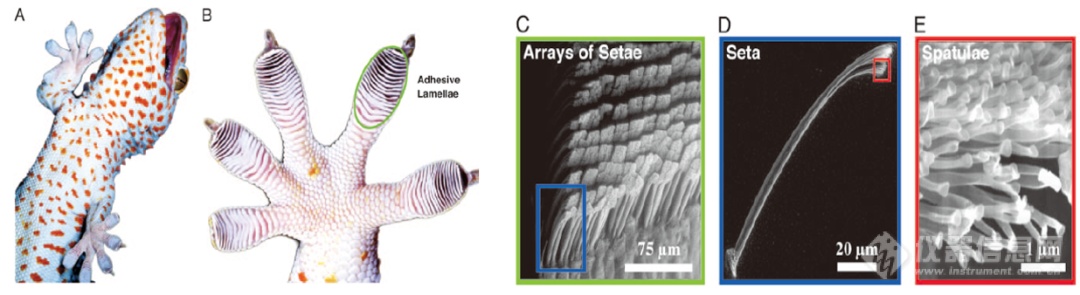
图1.壁虎脚掌黏附系统的结构
近日,受壁虎行为启发,北京理工大学先进结构技术研究院的陈少华教授课题组提出了一种仿生微柱功能表面通过力场调控实现自清洁功能的研究。该自清洁功能表面是结合微尺度3D打印技术(nanoArch P140,摩方精密)制备得到,其在颗粒筛选、运输等领域具有重要的应用前景。研究成果以“Self-Cleaning Performance of the Micropillar-Arrayed Surface and Its Micro-Scale Mechanical Mechanism” 为题发表在国际知名期刊《Langmuir》上。该研究工作由北京理工大学先进结构技术研究院博士生安华贞完成。
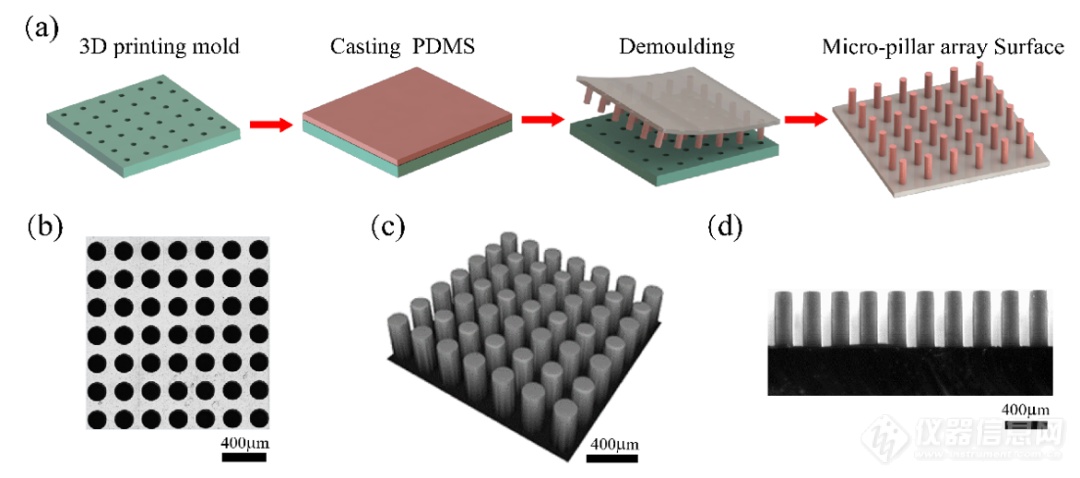
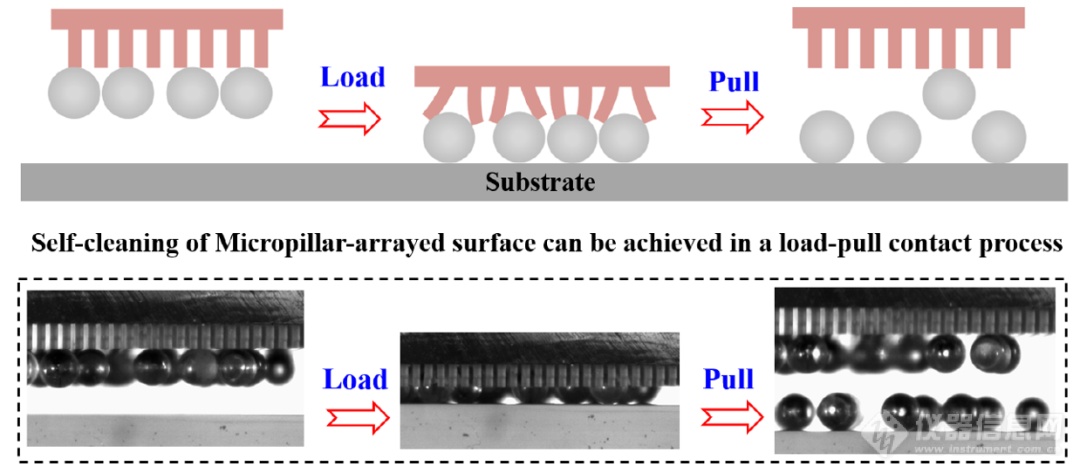
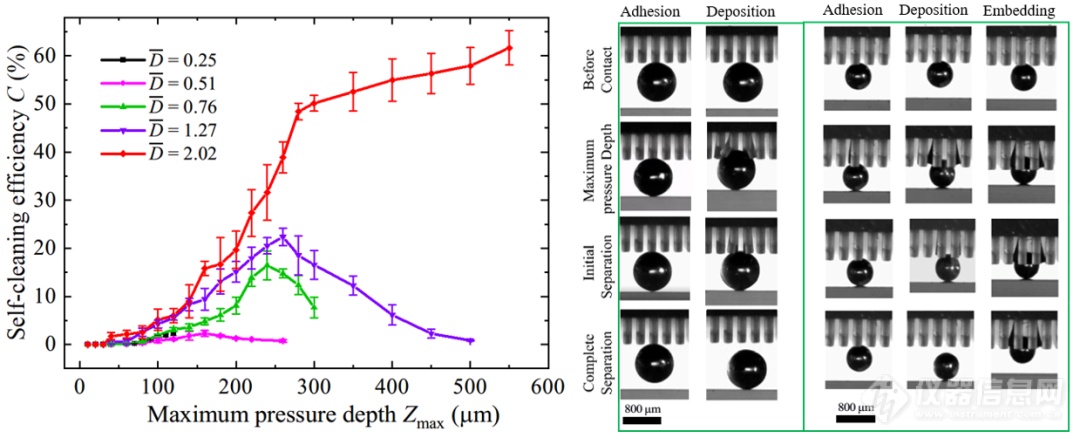
通过微尺度3D打印技术结合模板复制工艺制备出微柱阵列表面,在施加Load-pull的加载条件下研究了接触压力、颗粒尺寸等因素对微柱阵列表面自清洁行为的影响,并分析了其中的微观力学机制。研究结果发现,微柱阵列表面实现自清洁的主要微观力学机制为:在接触压力的作用下,颗粒与微柱的接触状态由黏附状态改变为易清洁的沉积状态。此研究不仅有助于深入理解微柱阵列表面的自清洁机理,而且为自清洁功能化表面的设计及微颗粒的可控粘附与输运等提供技术支持。
摩方携手国内科研团队,从实验室创新到全球产业化
微纳3D打印:推动生物支架研发进程,实现高端医疗器械自主创新

韩国航空宇宙研究院《JGR Planets》:基于3D打印月壤三维模拟物在小相位角下的光散射特性研究
摩方精密圣地亚哥研究院研发突破性仿生三维可灌注血管化皮肤芯片成功,开启药物与化妆品测试新时代



摩方材料BMF 3D打印微流控生物芯片
摩方精密BMF-复合精度光固化3D打印机 - microArch® D0210
摩方精密BMF-复合精度光固化3D打印机 - microArch® D1025
摩方材料BMF Material 3D打印服务 连接器3D打印
摩方材料BMF Material 3D打印服务 微针3D打印
摩方材料BMF Material 3D打印服务 内窥镜3D打印
摩方精密BMF-多材料光固化3D打印机- MultiMatter C1
摩方精密-LMM光固化金属3D打印机-Hammer Lab35
摩方精密BMF-光固化3D打印机(25μm)- microArch® S350
摩方精密BMF-生物3D打印机-P150
摩方精密BMF-生物3D打印机-microArch S240A
摩方精密BMF-生物3D打印机-S140
摩方精密BMF-生物3D打印机-S230
摩方精密BMF-生物3D打印机-S130
摩方精密-Exaddon CERES-微纳金属3D打印系统

关注

拨打电话

留言咨询





