
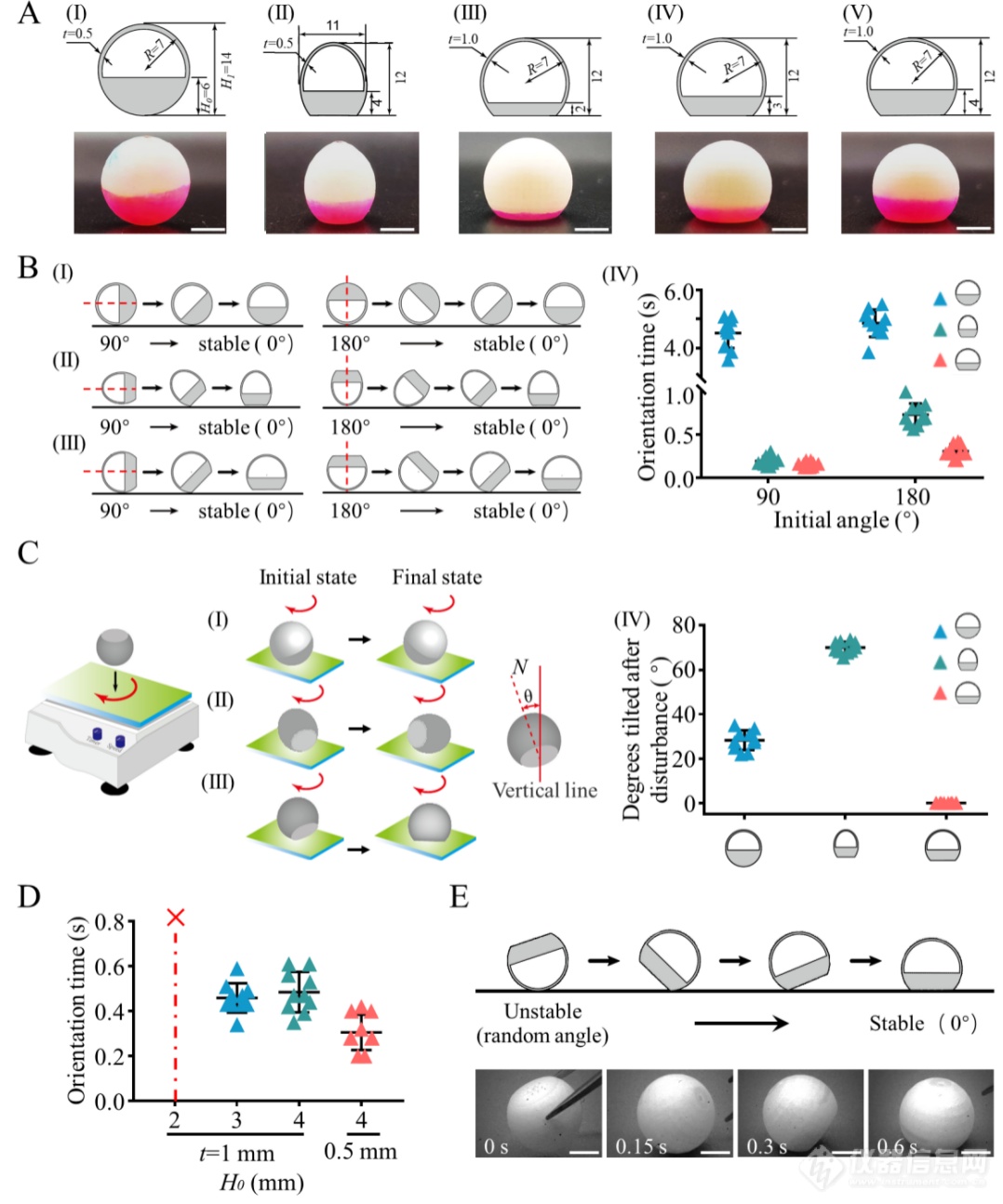
图2. 基于3D打印的微型机器人的参数优化。(a)半球、球形和椭球形三种形状和不同底座高度的半球形机器人(I-V)。(b)初始角度为90°和180°对不同形状的机器人(I-III)的自我定位时间(IV)的影响。(c) 不同形状的机器人在70 rpm的水平振动器上的稳定性,扰动后的最大偏差角度(IV)。(d) 具有不同底座高度和外壳厚度的半球形状机器人的定向时间。(e)参数优化后的机器人在随机角度下的自我定向时间。
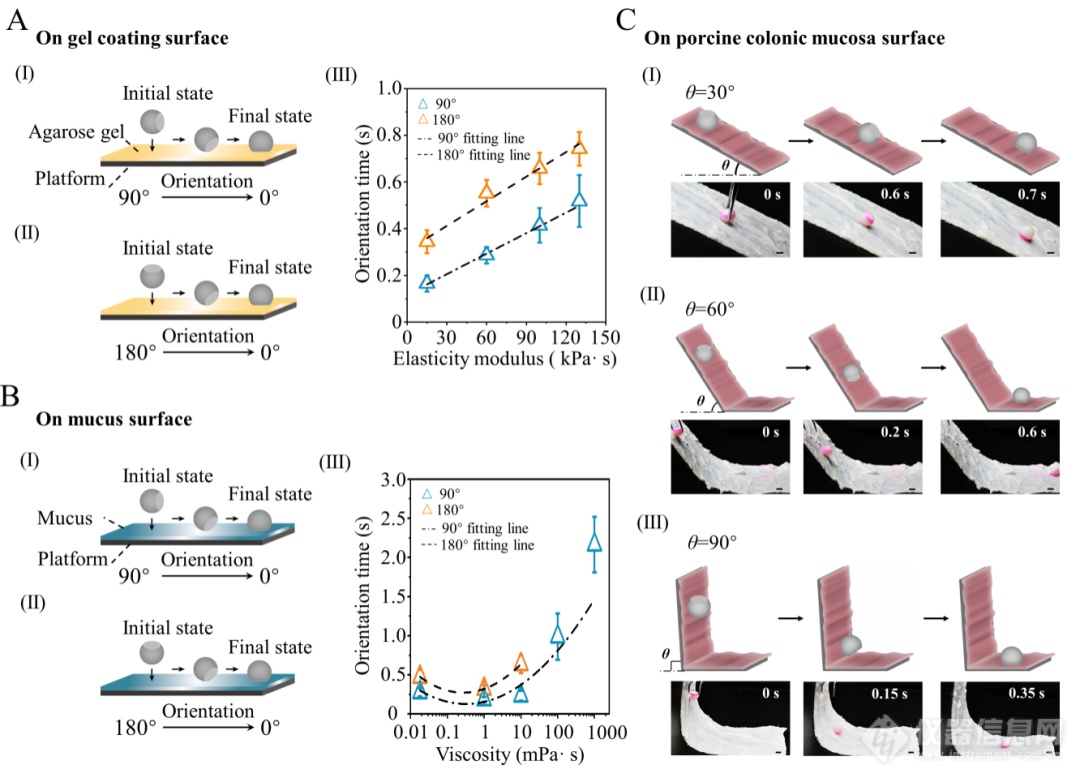
图3. 机器人在不同表面上的自定向性能。(a)初始角度为90°(I)和180°(II)的微针机器人在具有不同弹性模量(III)的琼脂糖凝胶表面上的定向时间。(b)初始角度为90°(I)和180°(II)的微针机器人在不同粘度(III)的粘液表面上的定向时间。(c)机器人在斜率为30°(I)、60°(II)和90°(III)的猪结肠粘膜上的自定向时间。
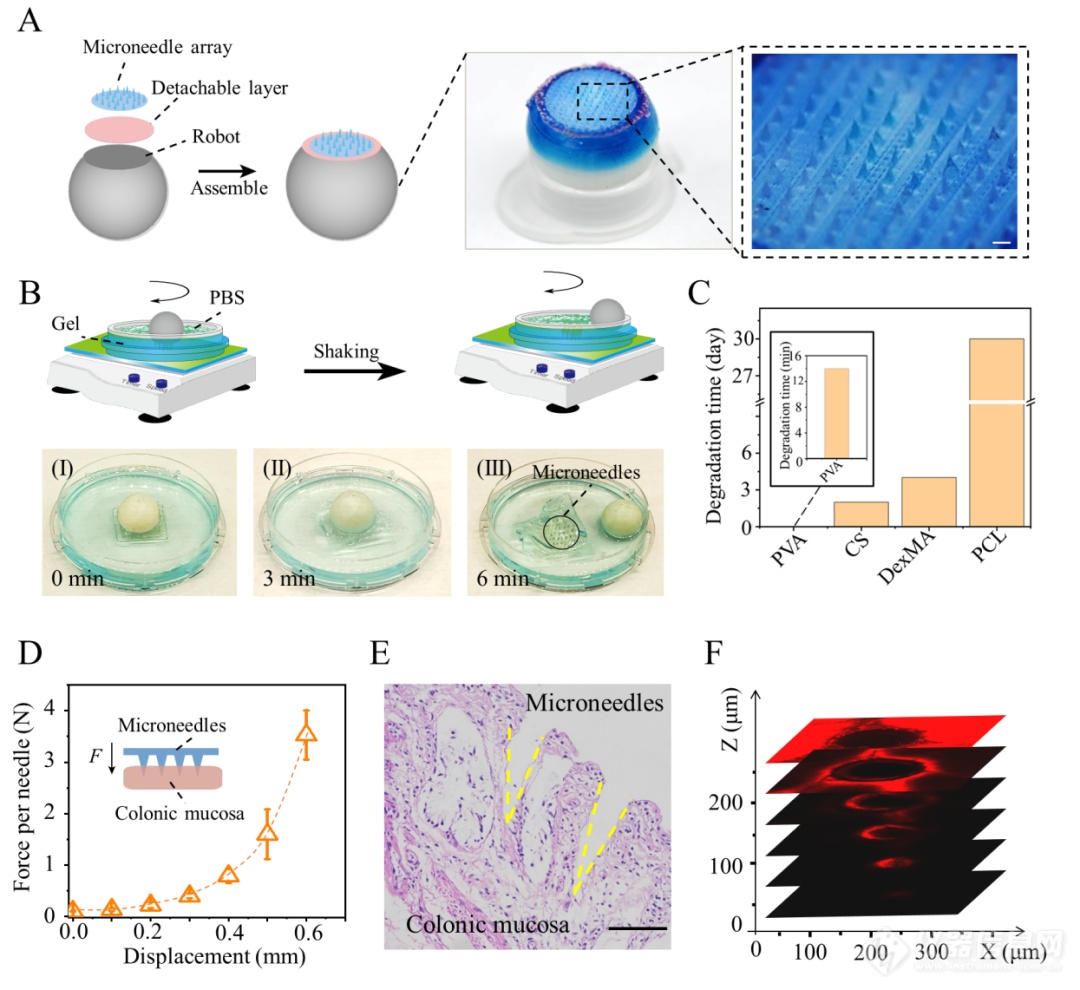
图4. 可拆卸微针机器人的设计与优化。(a)可分离的微针机器人的设计和组装。(b)由可分离层(I-III)的降解引起的微针机器人的体外分离实验。(c)PVA、CS、DexMA和PCL微针在PBS缓冲液中的体外累积释放时间。(d)对微针施加的力及其穿透粘膜的深度。(e)微针插入后的体外猪结肠组织切片图像(H&E染色法)。(f)Cyanine5.5染色的微针插入结肠组织的共聚焦显微图像。
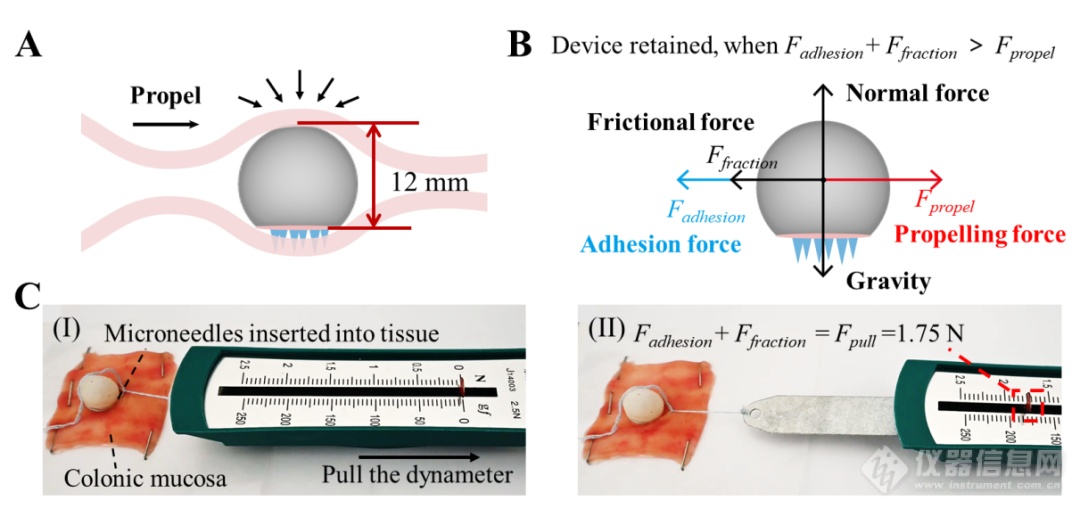
图5. 微针机器人抵抗结肠蠕动的理论模型。(a)在结肠蠕动下刺入粘膜的微针机器人的示意图。(b)结肠蠕动时腔内微针机器人的受力分析。(c)微针机器人被牵拉前(I)和牵拉后(II)的拉力示数。
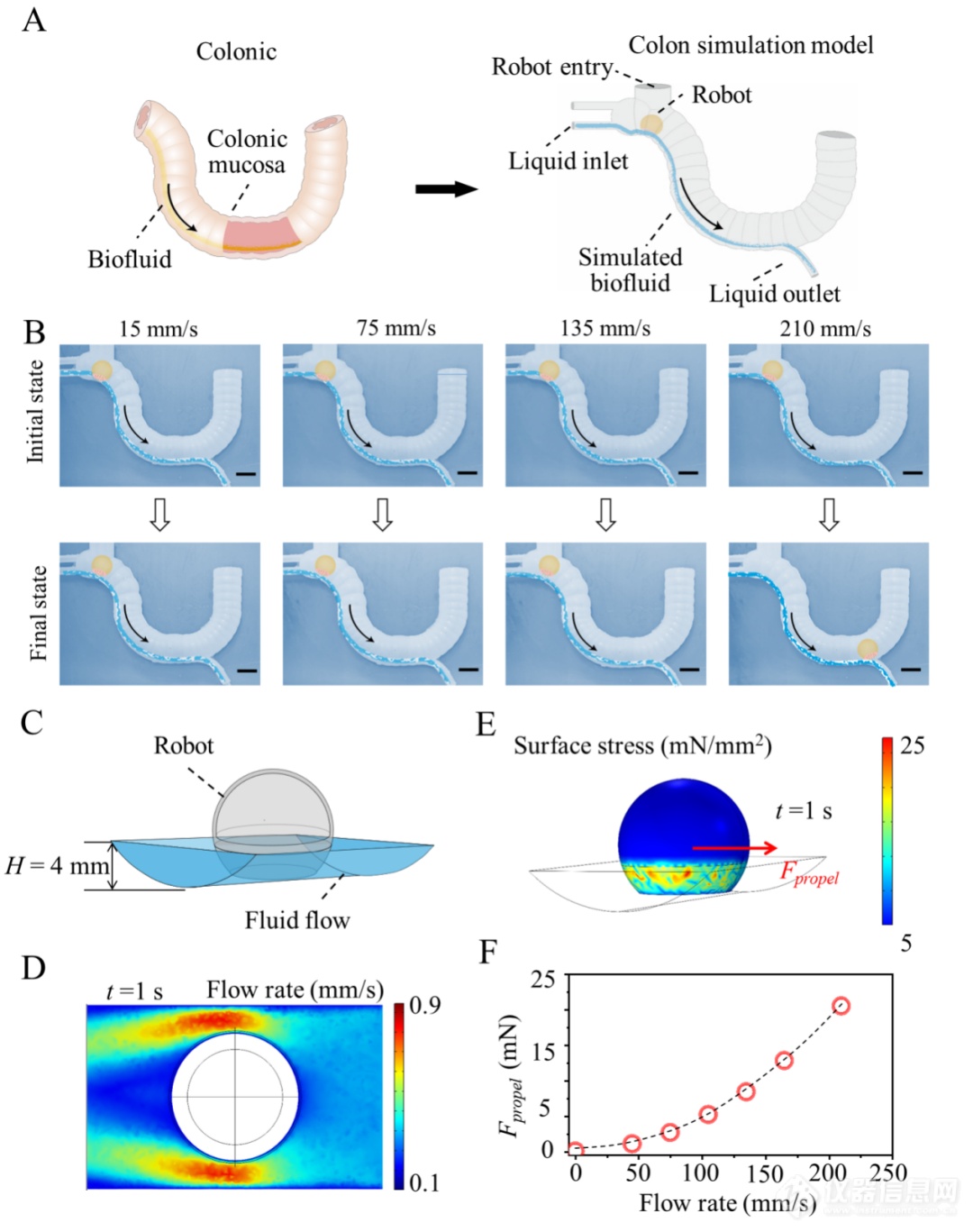
图6. 微针机器人的体外停留实验与模拟。(a)模仿人类结肠的软胶模型。(b)不同流速下机器人的运动。(c)构建机器人的有限元流-固模型,流速为210 mm/s时机器人周围的(d)流速分布和(e)表面应力,以及(f)不同流速对机器人的推进力。
原文链接:
https://doi.org/10.1002/adfm.202304276
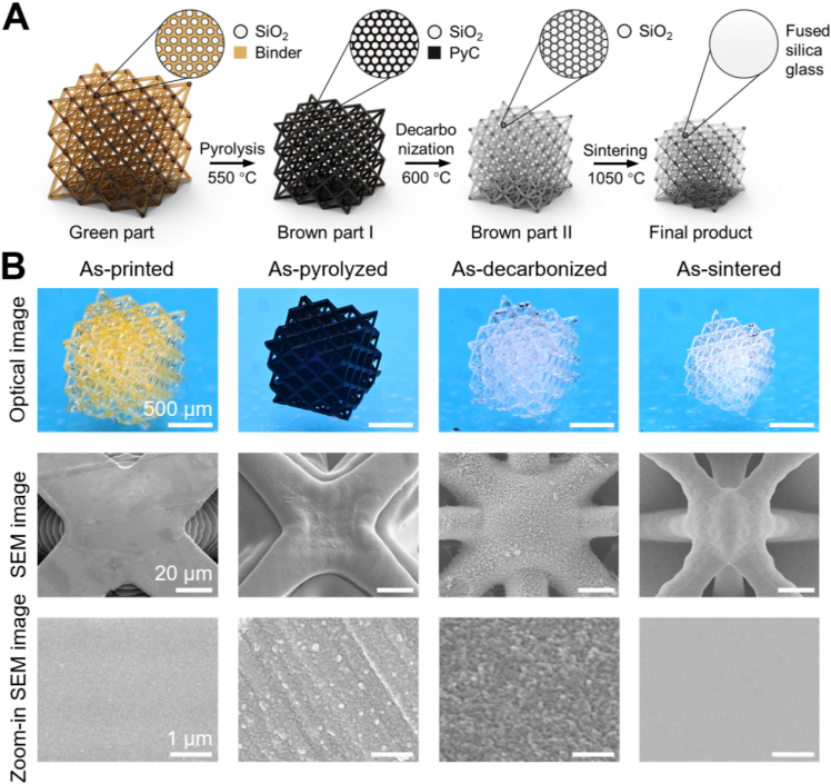
香港大学/香港理工大学《CRPS》:基于玻璃3D打印的微点阵力学超材料
微纳3D打印:创新驱动医疗产业发展,点亮生命之光

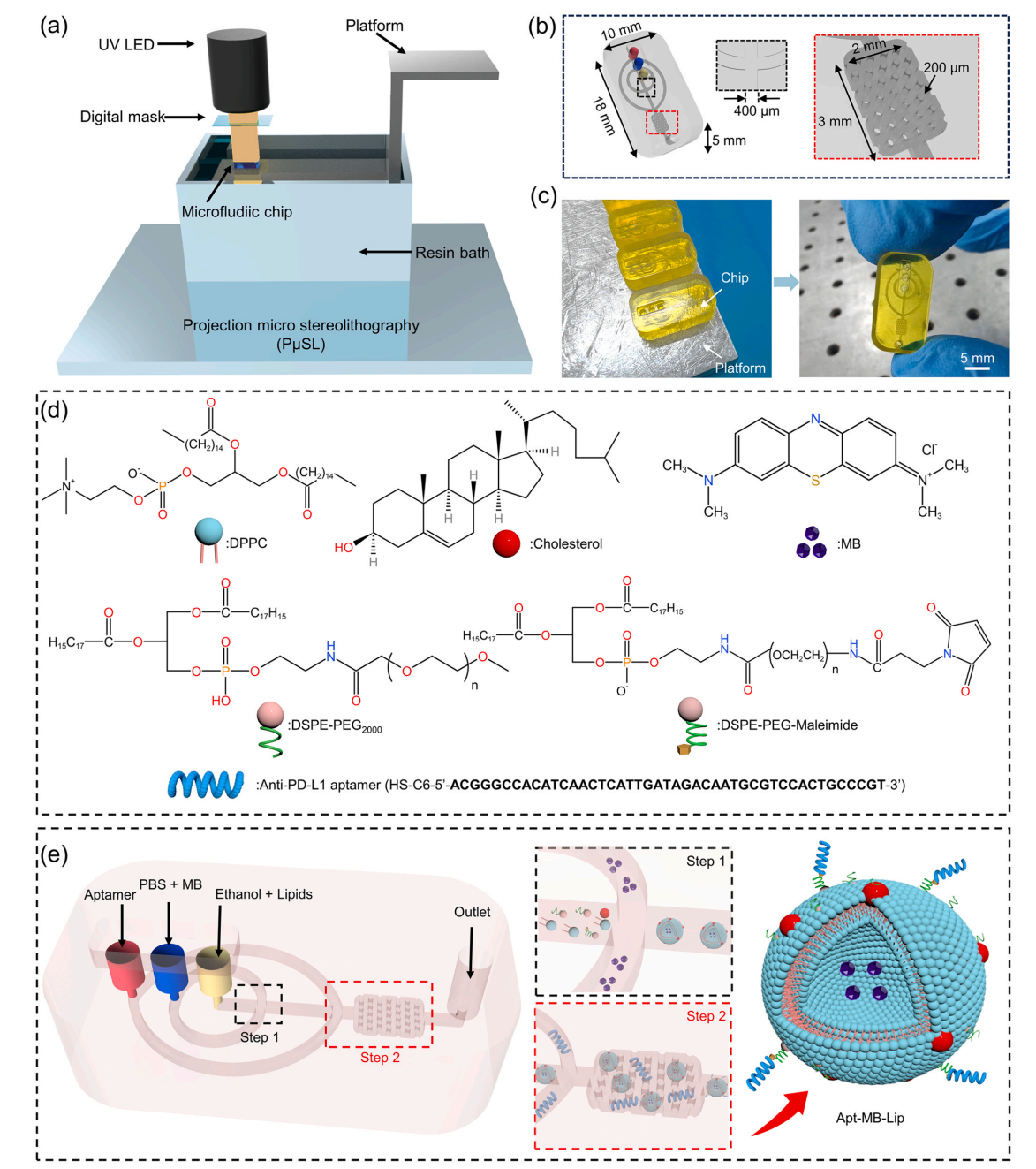
中南大学《SENSOR ACTUAT B-CHEM》: 微流控技术制备适配体修饰的脂质体探针用于瞬态
摩方精密荣获国家级专精特新“小巨人”企业荣誉称号!

相关产品
摩方材料BMF 3D打印微流控生物芯片
摩方精密BMF-复合精度光固化3D打印机 - microArch® D0210
摩方精密BMF-复合精度光固化3D打印机 - microArch® D1025
摩方材料BMF Material 3D打印服务 连接器3D打印
摩方材料BMF Material 3D打印服务 微针3D打印
摩方材料BMF Material 3D打印服务 内窥镜3D打印
摩方精密BMF-多材料光固化3D打印机- MultiMatter C1
摩方精密-LMM光固化金属3D打印机-Hammer Lab35
摩方精密BMF-光固化3D打印机(25μm)- microArch® S350
摩方精密BMF-生物3D打印机-P150
摩方精密BMF-生物3D打印机-microArch S240A
摩方精密BMF-生物3D打印机-S140
摩方精密BMF-生物3D打印机-S230
摩方精密BMF-生物3D打印机-S130
摩方精密-Exaddon CERES-微纳金属3D打印系统

关注

拨打电话

留言咨询






