
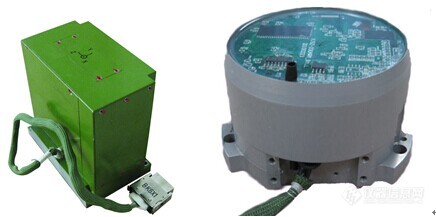
高动态载体环境力测量仪研制
导读:针对高过载(大于16000g)、高速度(2~5马赫)、高速自旋(30~100转/秒)条件下载体姿态稳定、运动控制对载体姿态精确测量的迫切需求,突破高动态载体复杂运动建模仿真技术、高动态载体姿态实时解耦技术、姿态耦合误差抑制技术,实现一种适用于高动态运动环境下载体环境力精准测量的仪器,
成果名称 | 高动态载体环境力测量仪 | ||
单位名称 | 高动态导航技术北京市重点实验室 | ||
联系人 | 付国栋 | 联系邮箱 | fuguodd@163.com |
成果成熟度 | □正在研发 □已有样机 □通过小试 □通过中试 √可以量产 | ||
合作方式 | √技术转让 √技术入股 √合作开发 □其他 | ||
成果简介:
针对高过载(大于16000g)、高速度(2~5马赫)、高速自旋(30~100转/秒)条件下载体姿态稳定、运动控制对载体姿态精确测量的迫切需求,突破高动态载体复杂运动建模仿真技术、高动态载体姿态实时解耦技术、姿态耦合误差抑制技术,实现一种适用于高动态运动环境下载体环境力精准测量的仪器,达到以下技术指标:加速度计量程:±20000g;加速度计灵敏度:0.01mV/g;角速率陀螺量程:±50000°/s;角速率测量分辨率:0.5°/s。成果广泛应用于钻井钻杆姿态控制、制导武器装备等领域。项目目前已完成样机研制,并在多种高动态环境下进行了应用验证,验证结果满足技术指标要求,具备成果推广与产业化条件。 | |||
应用前景: | |||
知识产权及项目获奖情况: | |||
来源于:仪器信息网


产研-星羽
总阅读量 0





仪器优选·水质在线监测
更多




近期会议
更多


热门评论
最新资讯
新闻专题
更多推荐
