
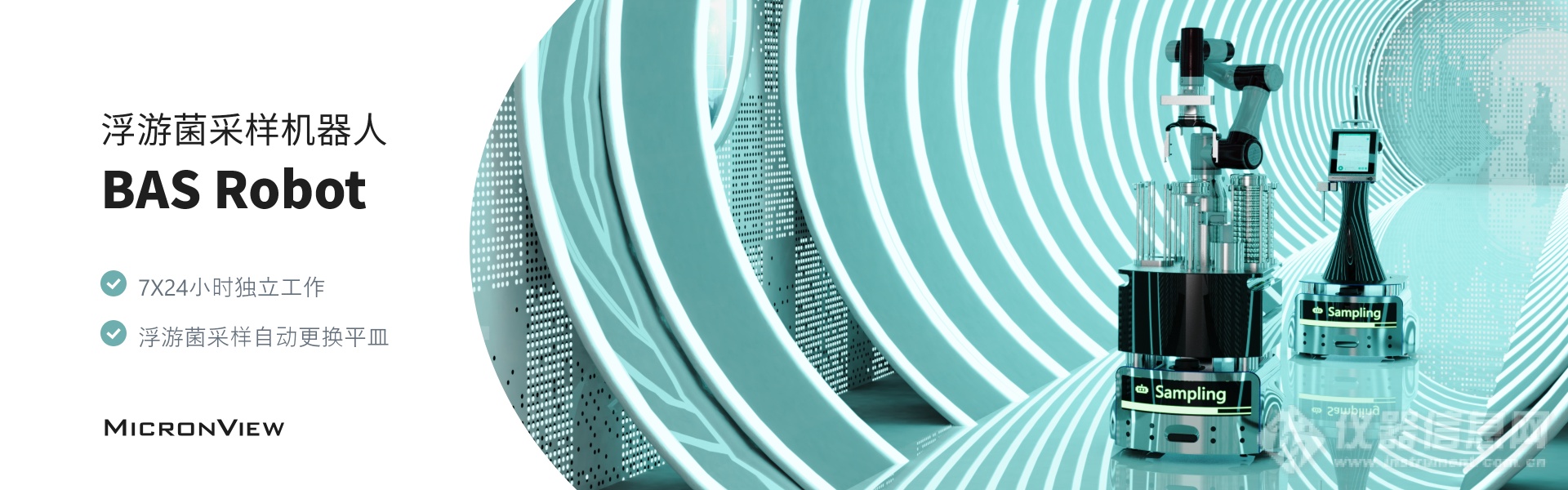
『新品发布』麦克微尔推出全新产品——浮游菌采样机器人

Introduction
浮游菌采样机器人 (简称BAS Robot) 基于 SLAM* 算法和激光雷达的避障系统确保了位点的精准到达和洁净室环境的全自动浮游菌采样。可以实现多个指定区域或采样位点的巡检、自动开关门、自动更换和收集培养皿、自主运送培养皿至工作站以及自动回桩充电等功能。通过全自动采样,减少关键区域的人工操作,降低对环境和样品的污染以及由于人为因素导致的错误风险。
浮游菌采样机器人搭载有高精度多关节机械臂, 可根据任务需求进行编程, 精准完成各种复杂操作, 性能稳定,适用于各级别洁净环境的自动化浮游菌采样作业。

Feature
安全高效 - 全自动浮游菌采样
定时任务 - 无人值守更换、运送培养皿
一体化机械臂设计 - 高精度、强稳定性、低风险
适配性高 - 可搭载多种设备

Application
浮游菌采样机器人降低了对环境和样品的污染以及由于人为因素导致的错误风险。
自动化标准任务可以更好的优化人员配比,提升关键任务的执行质效。浮游菌采样机器人还可搭载温湿度传感器用于采集和存储周围环境的温湿度信息, 一机多用,功能丰富。


高精度六轴机械臂
- IP54的防护等级,可以直接喷淋消杀
- 通过了 ISO 15066 和 ISO 13849的安全认证
- 重复精度 ±0.02mm, 精准控制
- 六轴控制,可实现各种复杂动作
SLAM*即同步定位与地图创建(Simultaneous Localization and Mapping)。基于SLAM算法,EMC Robot能够通过环境的观测确定自身的运动轨迹,同时构建出环境的地图。
来源于:麦克微尔(上海)科技有限公司







热门评论
最新资讯
厂商动态
新闻专题

写评论…
0