
小型化设备助力自由活动下大规模脑区记录!
导读:美国明尼苏达大学研究团队开发“颅骨外骨骼”机器人设备,允许小鼠在自由活动中进行大规模神经记录,显著提高行为研究精度和神经科学理解。
【研究背景】
近年来,神经科学的研究不断发展,特别是在理解大脑如何调控行为方面。传统上,神经科学家通常对各个独立的脑区进行研究,以确定其在行为中的作用。然而,随着神经记录技术的进步,如高密度硅神经记录探针(Neuropixels)和中尺度光学成像系统,这一研究方法已发生改变。新的技术能够同时记录成千上万神经元的活动,使科学家能够深入研究分布在多个解剖和功能上不同的脑区的神经基础。这些技术的广泛应用对于探索复杂的行为机制具有重要意义,但其大型的形态和重量使得传统的记录方式通常要求将动物固定,限制了其行为表现。
与传统的头部固定方法相比,使用小型化神经记录设备的尝试尽管有效,却常常需要在设备性能和负载之间做出权衡,导致记录数据的准确性受到影响。这些限制引发了新的挑战,如何在自由活动的情况下进行大规模的神经记录成为一个亟待解决的问题。
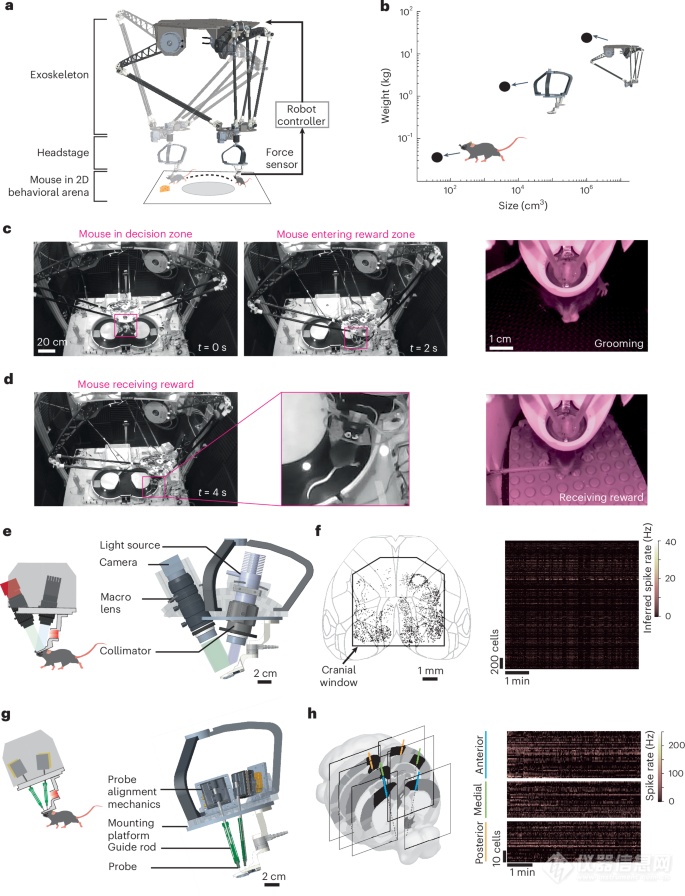
近日,来自美国明尼苏达大学ames Hope,Suhasa B. Kodandaramaiah教授课题组的研究团队在这一领域取得了新进展。他们设计并制备了一种创新的机器人神经记录设备——“颅骨外骨骼”。该设备能够有效支持比小鼠更大且更重的记录头架,使小鼠在物理行为环境中能够自由活动。通过发现的最佳控制器参数,研究人员实现了小鼠以生理上真实的速度运动,同时保持自然步态。这一设备的成功应用使小鼠能够在二维行为场中灵活移动,并高效地进行感觉线索引导的决策任务。
利用新型的机器人成像和电生理头架,该团队显著提高了神经记录的性能,成功获取了成千上万的神经元活动数据。这一成果不仅推动了神经科学领域对大脑与行为关系的理解,也为进一步的研究提供了新的技术路径和理论基础,展现了在自由活动条件下进行大规模神经记录的巨大潜力。
【仪器解读】
本文通过结合广域成像与多点电生理学技术,基于现代神经科学的研究原理,首次研发了一种机器人外骨骼(exoskeleton)仪器,从而实现了对小鼠在自然物理环境中行为的全面表征与分析,最终揭示了神经活动如何介导与生物相关的复杂行为。这一创新的设备不仅突破了以往仅限于头固定状态的实验限制,还为小鼠提供了自然的多感官体验,包括运动-前庭输入耦合、自然的眼-头部运动耦合、以及对物理边界的触须反应等。这种自然环境下的神经表征,能够更加真实地反映小鼠的感知与行为,进而为探索大脑如何在复杂生态环境中调节行为提供了新的研究途径。
针对小鼠在控制自由度(1或3个自由度)下的行为表现,本文通过机器人-啮齿动物交互动态的分析,得到了机器人对小鼠行为影响的深入理解。研究表明,尽管在我们研究的导航任务中,行为表现未受到显著影响,但一些行为(如转向时的步态和快速头部转动)可能因机器人控制的带宽限制而受到抑制。因此,未来将机器人自由度扩展至6个,并提高控制带宽,将有助于更自然地呈现小鼠的行为,如梳理和转向,从而拓宽行为研究的范围。
此外,本文利用线性通量控制器为小鼠提供了可预测的机器人-啮齿动物界面,进而实现了对实验设计的有效控制。这为进一步探索非线性控制方法、个性化控制参数和逐步调整控制参数提供了新的研究方向,这些方法在已成功应用于人类的机器人外骨骼控制中,并可能同样适用于小鼠。通过监测多个身体部位与颅骨施加的力之间的相互作用,结合传感器融合的方法,有望实现对小鼠更加完整的自然行为的呈现。
最后,本文在仪器设计上为未来的实验提供了丰富的拓展空间。新的头架设计允许同时插入多达12个CMOS记录探针,从而实现对成千上万神经元的同时记录。此外,结合多光子成像、电生理学和光遗传学等技术,可以在外骨骼上实现更复杂的实验设计。本文的创新性工作不仅为未来的神经科学研究提供了新的工具,也为理解小鼠在复杂环境中的行为机制奠定了基础。
颅骨外骨骼辅助小鼠在导航物理空间的全脑神经记录
【科学启迪】
本文探讨了一种创新的鼠类外骨骼系统,该系统结合了现代神经科学中的宽场成像和多点电生理技术。研究表明,通过扩展鼠类在物理环境中的自由度,可以为其提供更自然的多感官体验,这有助于揭示大脑活动如何调节复杂的行为。这一发现强调了自然环境对神经表征的重要性,促进了对老鼠在自由行为中认知和行为反应的理解。
此外,外骨骼的设计和控制技术为研究者提供了更多实验设计的灵活性,允许他们精确控制实验条件,以深入探讨鼠类的行为反应和意图。虽然目前的系统在自由度和带宽上存在一定限制,但未来的改进将可能实现更自然的行为表现。
研究还指出,非线性控制方法和传感器融合技术在提升机器人-啮齿动物接口的表现方面具有潜力。这些成果不仅为理解小鼠的神经活动提供了新的视角,也为开发高效的神经技术和脑机接口奠定了基础,预示着在神经科学和机器人技术结合领域的广阔前景。
参考文献:Hope, J., Beckerle, T.M., Cheng, PH. et al. Brain-wide neural recordings in mice navigating physical spaces enabled by robotic neural recording headstages. Nat Methods (2024). https://doi.org/10.1038/s41592-024-02434-z
来源于:仪器信息网


仪器 Go
总阅读量 0


近期会议
更多


热门评论
最新资讯
新闻专题
