

 仪器对比
仪器对比




 关注
关注





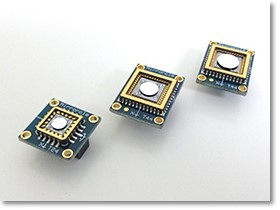
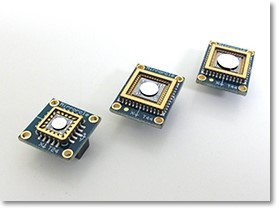
无万向节MEMS扫描镜
光学扫描镜是一种优秀的矢量扫描设备,能使入射光束按照特定的方式与时间顺序发生反射,从而在像面上实现扫描成像.传统的光学扫描镜体积大、成本高,且多为散装,大大限制了其应用。相较于传统的扫描镜,MEMS扫描镜具有尺寸小、成本低、扫描频率高、响应速度快和功耗低等优点,以被广泛的应用在光通信、扫描成像、激光雷达、内窥镜、3D扫描成像等领域。
按照扫描维度不同,MEMS扫描镜可以分为一维扫描镜和二维扫描镜,一维扫描镜是指在镜面在一个维度内偏转,二维扫描镜是指沿着两个方向同时对光束进行调节。实现二维扫描,可以选用两个一维的扫描镜,也可以选用两个一个二维的扫描镜。相比较而言二维扫描镜功能更强大,但是结构也更复杂,控制的难度也就越大。
按照驱动方式的不同,MEMS扫描镜可以分为静电驱动、电磁驱动、压电驱动和电热驱动四种驱动方式。电热驱动是,利用电能转换为热能,再转换为机械能驱动,其优点是驱动力和驱动位移较大,但是响应速度较慢。压电驱动是利用压电材料的压电效应实现驱动,具有驱动力大、响应速度快等优点,但是压电材料存在迟滞现象。电磁驱动是利用电磁或者永磁体实现驱动,具有较大的驱动力力和驱动位移,但是响应速度偏慢,且容易受到电磁干扰。静电驱动是利用带电导体间的静电作用力实现驱动,具有功耗低、速度快、兼容性好等优点。是目前使用最广泛的驱动方式。下图给出了各种驱动方式的性能对比
驱动方式 | 速度 | 力 | 幅度 | 电压 |
压电驱动 | 快 | 大 | 小 | 高 |
电磁驱动 | 慢 | 大 | 大 | 低 |
热驱动 | 慢 | 大 | 大 | 较低 |
静电驱动 | 快 | 小 | 较小 | 高 |
上海昊量光电推出的MEMS扫描镜全部由单晶硅制成,也就是说这种设计使运动部件不包括任何易出故障的部件,例如,金属、聚合物、压电材料等。使其拥有卓越的重复性和可靠性。采用拥有专利的无万向节设计,使大镜面尺寸和大角度偏转的MEMS微振镜拥有更高的速度。静电驱动的MEMS扫描微振镜两个轴的偏转角度最大可达到32°,在满振幅运转功耗仅为几毫瓦。目前静电驱动的微振镜可提供的一维和二维的MEMS扫描镜,可提供直径从0.8mm到5mm微型振镜。

该款微振镜针对对点对点(受迫振动)光束扫描进行了特殊设计及优化。该MEMS扫描镜采用静电驱动且选用整个单晶硅制备而成,因此使得驱动电压和偏转角度之间存在良好的一一对应的关系,并且有着极佳的可重复性,而且随着使用时间的推移依然保持着极高的性能。对于开环的微振镜,致动器在每个轴上至少有14Bits(约16384个位置),因此当机械偏转角度为-5°到+5°是,角度的分辨率可达到10微弧度。

在整片的单晶硅上采用拥有专利技术的无万向节设计和独特的多级悬梁制造工艺制作一个完整的微镜促动器。其中采用无万向节设计可以使微镜在成像或光束偏转时可以在两个轴上达到同样的高速度。一个普通的拥有0.8mm直径的微镜,当机械偏角为-6°到+6°时,非谐振偏转速度超过1000rad/s,第一谐振频率更是达到3.6KHz。

与常规的MEMS扫描镜不同的是,该微型振镜可以在多个模式下工作,即点对点模式(受迫振动)、混合模式和谐振模式。如下图所示:

a)这种模式可称为点对点模式,或者是静态模式。在这种情况下两个轴利用设备操作的宽带宽从直流到某个频率,并且不允许谐振。因此镜子可以保持在某一位置,或者以匀速运动或执行矢量图形等。
b)第二种模式为混合模式,即其中一个轴处于准静态模式,另外一个轴处于谐振模式
c)第三种模式为谐振模式,这时两个轴利用狭窄高增益共振来获得较大的偏角较低的电压以及较高的速度。设计用于点对点模式的设备,在接近共振或共振时倍驱动,很容易超过安全偏转角而损坏。因此需要使用非常小的正弦驱动电压驱动接近谐振工作模式,并且非常仔细的寻找所需要的工作点和角度,以便不超过给定的最大机械偏角限制。
u 主要特点:
l 大的镜面尺寸
l 大的光学偏角最大可达32°
l 重复精度可达到0.001°
l 可实现静态扫描模式(受迫振动)
u 主要应用:
l 投影显示装置
l 扫描成像及激光雷达成像
l 3D跟踪和位置测量
l 激光打标、雕刻
l 光束偏转、扫描
u 主要参数:
Integrated Mirror Devices: | Bonded Mirror Devices: |
Mirror Sizes: 0.8 mm, 1.2mm, 1.6mm, 2.0mm, and 2.4mm diameter always in stock. | Bonded Mirror Sizes: 2.0, 2.4, 3.0, 3.6, 4.2, and 5.0mm diiameter n stock, larger possible in special orders. |
Maximum tilt angle under point-to-point driving:-6° to +6° mechanical each axis, varies with design type. | Maximum tilt angle under point-to-point driving: -6° to +6° mechanical on each axis, varies with design type. |
Maximum tilt angle under resonant driving: -7° to +7° mechanical | Maximum tilt angle under resonant driving: -7° to +7° mechanical, varies with design type. |
Surface Roughness: <10 nm rms | |
Driving Methodology: Electrostatic drive, using Mirrorcle's Bias-differential Quad-Channel | |
Mirror Radius of Curvature: >5 m | |
Mirror Coating: Aluminum or Gold | |
Positional repeatability: better than 0.001° (1 millidegrees) at room temperature | |
Operating Temperature: -40°C to 125°C | |
Optical Window: Anti-reflection coated fused silica windows. Removable. | |
Optical power handling: up to 2W any mirror, any wavelength. Above 2W depends on mirror size, coating, and wavelength. E.g. 3W CW blue or green on a 2mm or larger mirror . | |
First resonant rotation frequency: >3 kHz for both axes for small mirror sizes, >1.2kHz for 2.0mm size, etc. | |
u MEMS扫描镜驱动控制器:


u MEMS扫描镜开发套件:


- 相关仪器



相关产品

