

 仪器对比
仪器对比



 关注
关注
平面(二位/三维)
进口
高频(100 HZ以上)
200m/s
1%
600mm*400mm





粒子图像测速仪PIV
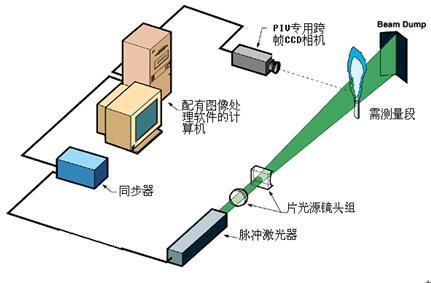
粒子图像测速技术(PIV) ( Particle Image Velocimetry)是流动显示技术的定量化延伸,是二十世纪末流体力学测量仪器和实验方法的重大发展,由于可以得到瞬时全场的速度信息, 相比以往单点的流速测量技术,PIV可以获得瞬时流动结构的真实信息,在流动结构的研究方面是其他手段无法相比的。
系统组成与整体性能
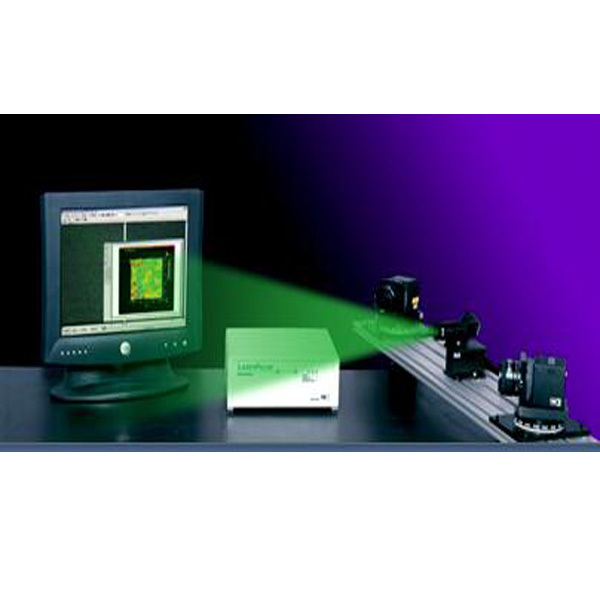
一套完整的PIV系统包括光源系统(双腔脉冲激光器,导光臂和片光源透镜组),图像采集系统(高分辩率跨帧CCD相机,64位专用高速图像数据采集板),控制协调系统(同步器),以及专用PIV图像数据处理和流场显示系统(Insight软件包及其外部接口)。
系统组成与整体性能
一套完整的PIV系统包括光源系统(双腔脉冲激光器,导光臂和片光源透镜组),图像采集系统(高分辩率跨帧CCD相机,64位专用高速图像数据采集板),控制协调系统(同步器),以及专用PIV图像数据处理和流场显示系统(Insight软件包及其外部接口)。
工作模式 | 支持 CCD 工作方式(互相关、自相关) 提供支持胶片工作接口(自相关模式) |
速度范围 | 最大可测速度不小于200m/s |
测量区域 | 不小于600mm*400mm |
空间分辨率 | 小于1mm*1mm(由镜头视场确定) |
速度测量维数 | 3维 |
各主要部件性能参数
I 脉冲激光器 | 1 套 YAG200-NWL_532/266 | |
PIV系统中激光器作为照明光源,采用美国NewWave公司的脉冲频率15Hz,能量200毫焦/脉冲大功率Nd:YAG激光器。激光器主要参数如下: | ||
激光器型号 | YAG200-NWL_532/266 | |
名称 | 美国NewWave公司产双钕:钇铝石榴石激光器 | |
激光功率 | 200 mJ/Pulse@532nm;30mJ/Pulse@266nm | |
激光器脉冲频率 | 15Hz | |
脉冲持续时间 | 3—5 ns | |
光束直径 | 6 mm | |
发散角 | 小于4 mrad | |
工作方式 | 自触发、外部触发,受同步器控制 | |
输入电源要求 | 单相输入 220V±10% , 最大电流20A,50/60 Hz | |
备注 | 激光器(含电源)由生产厂商保修一年 | |
II 光臂及片光源透镜组 | 1 套 TSI 610021 610015 |
光臂的作用是为了灵活调节片光源的位置,满足测量不同截面时片光源的灵活调整。 片光源透镜用于形成PIV系统的照明光路系统。工作原理是,脉冲激光器产生的激光脉冲光束首先经过一个凹柱面镜,形成一个一定角度的扇形光片,光片的厚度约等于激光光束的直径,约4mm,这个厚度对PIV测量来说太厚,因此,需要额外的一个球面镜将光片收缩到0.5~1mm厚度的片光。为了适应不同大小和测量距离的情况的需要,该套镜头组中采用了两个镜头组,分别为两个不同的凹柱面镜和两个不同的球面镜。 主要参数如下: | |
型号 | 610015 610021 |
名称 | 光臂及片光源透镜组 |
最大输入功率 | 500mJ/Pulse |
组件 | 多关节光臂一套(每关节均可360度旋转,全 展开可达1.8米长) 镜头基座一套 球面镜2个:焦距500mm,1000mm 柱面镜2个:焦距-25mm,-15mm 柱面镜到球面镜连接适配器一套 |
III PIV专用CCD | 两套 TSI 630062 & 630062-ST |
TSI的PIV系统的CCD为专门设计的,以便于用于PIV系统的测量。它在工作时序上不同 于普通的摄像头结构。主要参数如下: | |
型号 | 630062 630062-ST |
名称 | PowerView Plus 11MP 自相关/互相关CCD 相机 |
分辨率 | 4K X 2.6K |
祯频率 | 4.8祯/秒 |
镜头接口方式 | 标准Nikkon(F Mount) |
控制方式 | Free Run/Triggered Exposure/Triggered Double Exposure |
12位灰度图象数据 | |
最小跨祯时间 | 200ns |
输出 | 12位数字化输出,输出信号标准LVDS |
CCD包含CCD阵列激光保护罩 | |
VI 图象采集分析系统 | 1 套 TSI INSIGHT3G-SEC MODULE3G-2DPIV MODULE3G-STRPIV MODULE3G-PLIF |
名称 | 立体PIV/LIF图象采集及数据分析系统 |
功能 | Windwos XP 全 32-bit 软件包,系统通过RS232采用计算机命令控制; |
对CCD方式,实时显示采样的图象数据,在线显示方向矢量及标量场; | |
执行互相关和自相关分析;支持多CPU结构的并行相关处理 | |
内嵌Hart相关算法引擎,支持进行Hart相关处理,超细化处理流场速度分布,最小可达到的查问域可达4×4个象素得到一个速度矢量 | |
可对图象进行常规图象处理; | |
可对不同的片光源类型所获得的图象进行处理; | |
实时显示查问域及其相关时的峰值; | |
自动调整查问域的大小以获得最好的相关峰值; | |
计算点、线、图象中部分区域、及全部区域的速度; | |
后处理可计算平均速度、均方根值、涡量、剪应力、雷诺应力等;对速度矢量场进行有效性检验,并对其所缺矢量填空。 | |
内置(嵌入在Insight软件中)TECLPOT流场分析绘图软件; | |
采用专利背景处理技术,基于Matlab 工具箱详细的时序图像分析 | |
备注 | 本软件含有Insight3G-PIVLIF 软件加密狗一个; |
1年
否
无
1次
无
非人为损坏,保修1年
无

相关产品

