仪器表征,科学家开发了基于分子级裂纹调制策略的新型应变传感器!
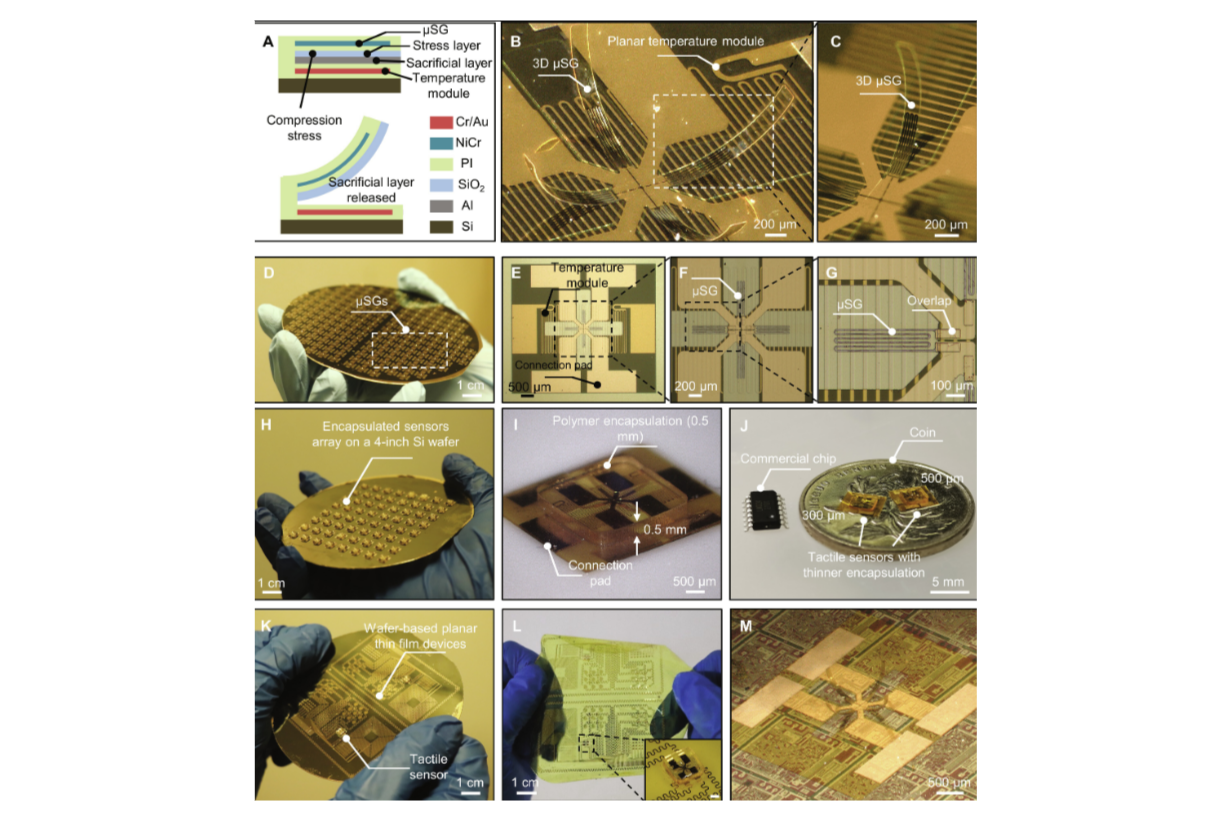
【科学背景】应变传感器是一种关键技术,用于在多种应用中实现高灵敏度的机械感知,如人形机器人的指尖控制和皮肤贴合健康监测设备。然而,现有的应变传感器普遍依赖于裂纹生成机制,这限制了它们在灵敏度、应变范围、稳定性和时间空间分辨率上的综合性能。传统裂纹导电材料在小传感面积与高性能之间存在固有的权衡,其裂纹易于扩展并难以控制,导致传感器在应对大应变和长期稳定性方面的表现有限。为解决这些挑战,天津科技大学生物基纤维材料国家重点实验室刘阳教授、国家重点实验室主任程博闻教授、南开大学Jiajie Liang课题组联合提出了一种分子级裂纹调制策略,采用逐层组装技术在MXene和银纳米线复合薄膜中引入了强、动态和可逆的硫-银(S-Ag)配位键。这种创新策略不仅在传感器中实现了极小的感测面积(仅0.25 mm² ),同时提供了超宽的工作应变范围(0.001-37%)、极高的灵敏度(在0.001%时的增益因子超过500,在35%时超过150,000)、快速的响应时间、低滞后和优异的长期稳定性。此外,基于这种高性能传感元件,研究团队成功实现了每平方厘米100个传感器的可拉伸传感器阵列,展示了高时间空间分辨率的实际应用,如多通道脉冲信号监测系统。【科学亮点】(1)本研究首次采用分子级裂纹调制策略,在MXene和银纳米线复合导电薄膜中引入强、动态和可逆的硫-银(S-Ag)配位键。这一策略通过逐层组装技术,实现了裂纹生成和传播的精确控制。(2)实验结果表明,所制备的基于裂纹的可拉伸应变传感器(S-M/A)具有多重优异的性能特征:传感面积极小(仅0.25 mm² ),但具备超宽的工作应变范围(0.001-37%),高灵敏度(在0.001%应变下的增益因子超过500,35%应变时超过150,000),快速的响应时间(约5毫秒),低滞后和长期稳定性。此外,通过S-Ag配位键的动态调控,传感薄膜能有效地能量耗散,防止裂纹间隙的扩展,从而保持了纳米级别的裂纹结构和传感性能的稳定性。(3)这一研究突破了传统裂纹调制策略的限制,克服了传感面积和性能之间的固有权衡,为高密度、高分辨率的可拉伸应变传感器阵列的实现提供了新的思路和方法。通过高效的组装工艺,作者实现了每平方厘米100个传感器的集成,展示了该传感器阵列在多通道脉冲感测系统中的实际应用,具备优异的时间空间分辨率和监测精度。【科学图文】图1:引入S-Ag配位键到S-M/A感测薄膜中。图2:S-MXene和S-M/A薄膜的表征。图3:S-M/A传感器的应变感测性能。图4:应变感测性能比较。图5:S-M/A感测薄膜的裂纹调制行为。图6:S-M/A传感器阵列在脉冲信号测量中的应用。【科学结论】本文开发了一种基于分子级裂纹调制策略的新型应变传感器,通过引入强、动态和可逆的S-Ag配位键,有效地解决了传统裂纹型传感器中传感面积与性能之间的权衡问题。此技术不仅在传感面积极小的情况下实现了超高灵敏度和广泛的应变范围,还通过动态调控裂纹形态和能量耗散机制,提高了传感器的稳定性和可靠性。通过分子级的设计和制备过程,将有机和无机材料有效地结合在一起,为高性能应变传感器的设计提供了新的思路和方法。此外,本文展示了简便且可扩展的制造工艺,为实现高密度、高分辨率的传感器阵列奠定了基础。这种基于分子级裂纹调制的策略不仅有助于推动应变传感器技术的进步,还为未来在可穿戴设备、健康监测和智能机器人等领域中需求高精度、高稳定性传感器的开发提供了新的理论和实践基础。原文详情:Liu, Y., Xu, Z., Ji, X. et al. Ag–thiolate interactions to enable an ultrasensitive and stretchable MXene strain sensor with high temporospatial resolution. Nat Commun 15, 5354 (2024). https://doi.org/10.1038/s41467-024-49787-9

























 我要推广仪器
我要推广仪器
 下载APP
下载APP