推荐厂家
暂无
暂无
 银牌3年
银牌3年
 400-860-5168转4923
400-860-5168转4923
 留言咨询
留言咨询
留言咨询
留言咨询
留言咨询
留言咨询
 400-805-8969
留言咨询
400-805-8969
留言咨询
 400-860-5168转5998
留言咨询
400-860-5168转5998
留言咨询
 400-860-5168转5998
留言咨询
400-860-5168转5998
留言咨询


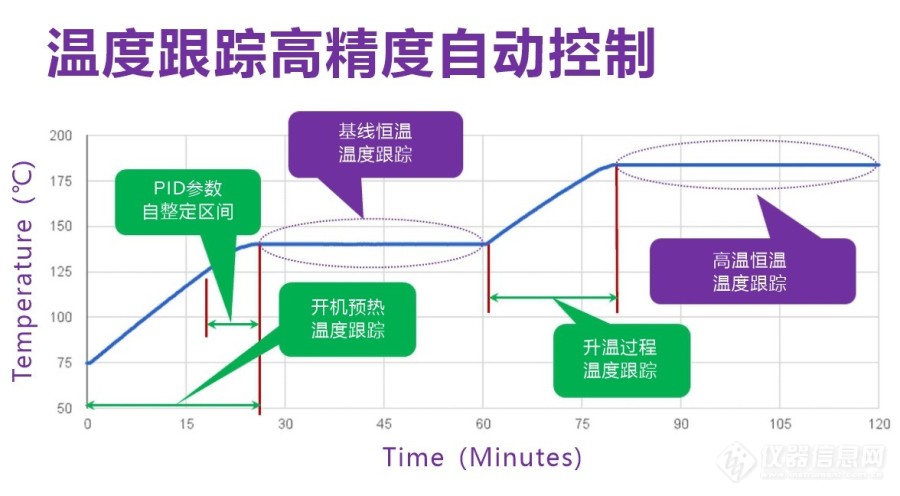
[color=#990000]摘要:针对温度跟踪控制中存在热电堆信号小致使控制器温度跟踪控制精度差,以及热电阻形式的温度跟踪控制中需要额外配置惠斯特电桥进行转换的问题,本文提出相应的解决方案。解决方案的核心是采用一个多功能的超高精度PID控制器,具有24AD和16位DA,可大幅提高温差热电堆跟踪温度控制精度。同时,此PID控制器具有远程设定点功能,两个热电阻温度传感器可直接接入控制器就能实现相应的温度自动跟踪控制。由此仅通过一个超高精度PID控制器,可实现热电偶和热电阻形式的高精度温度跟踪控制。[/color][align=center][img=高精度温度跟踪控制,600,330]https://ng1.17img.cn/bbsfiles/images/2023/01/202301051642301750_9704_3221506_3.jpg!w690x380.jpg[/img][/align][size=18px][color=#990000][b]1. 问题的提出[/b][/color][/size] 在一些工业领域和热分析仪器领域内,常会用到温度自动跟踪功能,以达到以下目的: (1)保证温度均匀性:如一些高精度加热炉和半导体圆晶快速热处理炉等,为实现一定空间或面积内的温度均匀,一般会采取分区加热方式,即辅助加热区的温度会自动跟踪主加热区。 (2)绝热防护:在许多热分析仪器中,如绝热量热仪、热导率测试仪和量热计等,测试模型要求绝热边界条件。这些热分析仪器往往会采取等温绝热方式手段,由此来实现比采用隔热材料的被动绝热方式更高的测量精度。 自动温度跟踪功能的使用往往意味着要实现快速和准确的温度控制,其特征是具有多个温度传感器和加热器,其中温差探测器多为电压信号输出的热电偶和电阻输出的热电阻形式。对于采用这两种温差探测器的温度跟踪控制,在具体实施过程中还存在以下两方面的问题: (1)在以热电堆为温差传感器的跟踪温度控制过程中,往往会用多只热电偶构成热电堆来放大,N对热电偶组成的热电堆会将温差信号放大N倍,但即使放大了温差信号,总的温差信号对应的输出电压也是非常小。如对于K型热电偶,1℃温差对应40uV的电压信号,若使用10对K型热电偶组成温差热电堆,则1℃温差时热电堆只有400uV的电压信号输出。对于如此小的电压值作为PID控制器的输入信号,若要实现小于0.1℃的温度跟踪控制,一般精度的PID控制器很难实现高精度,因此必须采用更高精度的PID控制器。 (2)在以热电阻测温形式的跟踪温度控制过程中,情况将更为复杂,一般是采用复杂的惠斯登电桥(wheatstonebridge)将两只热电阻温度传感器的电阻差转换为电压信号,再采用PID控制器进行跟踪控制。但这样一方面是增加额外的电桥仪表,另一方面同样要面临普通PID控制器精度不高的问题。 为此,针对上述温度跟踪控制中存在的上述问题,本文将提出相应的解决方案。解决方案的核心是采用一个多功能的超高精度PID控制器,具有24AD和16位DA,可大幅提高温差热电堆跟踪温度控制精度。同时,此PID控制器具有远程设定点功能,两个热电阻温度传感器可直接接入控制器就能实现相应的温度自动跟踪控制。由此通过一个超高精度PID控制器,可实现热电偶和热电阻形式的高精度温度跟踪控制。[b][size=18px][color=#990000]2. 解决方案[/color][/size][/b] 为了实现热电堆和热电阻两种测温形式的温度跟踪控制,解决方案需要解决两个问题: (1)高精度的PID控制器,可检测由多只热电偶组成的温差热电堆输出小信号。 (2)不使用电桥仪器,直接采用PID控制器连接两只热电阻温度传感器进行跟踪控制。 为解决温度跟踪控制中的上述两个问题,解决方案将采用VPC-2021系列多功能超高精度的PID控制器。此控制器的外观和背面接线图如图1所示。[align=center][img=,600,177]https://ng1.17img.cn/bbsfiles/images/2023/01/202301051656426331_2008_3221506_3.jpg!w690x204.jpg[/img][/align][align=center][b][color=#990000]图1 VPC 2021系列多功能超高精度PID控制器[/color][/b][/align] 针对温度跟踪控制,VPC 2021系列多功能超高精度PID程序控制器的主要特点如下: (1)24位AD,16位DA,双精度浮点运算,最小输出百分比为0.01%。 (2)可连接模拟电压小信号,可连接各种热电偶,可连接各种铂电阻和热敏电阻温度传感器,共有多达47种输入信号形式。 (3)具备远程设定点功能,即将外部传感器信号直接作为设定点来进行自动控制。 对于由热电偶组成的热电堆温差探测器形式的温度跟踪控制,具体接线形式如图2所示。[align=center][color=#990000][b][img=温差热电堆控制器接线图,500,194]https://ng1.17img.cn/bbsfiles/images/2023/01/202301051643371408_3010_3221506_3.jpg!w690x268.jpg[/img][/b][/color][/align][align=center][b][color=#990000]图2 温差热电堆控制器接线图[/color][/b][/align] 图2是典型的温差热电堆控制器接线形式,其中用了两只或多只热电偶构成的热电堆检测物体AB之间的温差,温差信号(电压)直接连接到PID控制器的主输入端,PID控制器调节物体B的加热功率,使温差信号始终保持最小(近似零),从而实现物体B的温度始终跟踪物体A。 对于由热电阻温度传感器形式构成的温度跟踪控制,具体接线形式如图3所示。这里用了控制器的远程设定点功能,这时需要物体AB上分别安装两只热电阻温度计,其中物体B上的热电阻(两线制或三线制)连接到PID控制器的主输入端作为控制传感器,物体A上的热电阻(与物体B热电阻制式保持相同)连接到PID控制器的辅助输入端作为远程设定点传感器,由此实现物体B的温度调节始终跟踪物体A的温度变化。[align=center][img=热电阻温度传感器控制器接线图,500,195]https://ng1.17img.cn/bbsfiles/images/2023/01/202301051644317319_3570_3221506_3.jpg!w690x270.jpg[/img][/align][align=center][b][color=#990000]图3 热电阻温度传感器控制器接线图[/color][/b][/align][b][color=#990000][size=18px]3. 总结[/size][/color][/b] 高精度的温度跟踪控制一直以来都是一个技术难点,如对于热电偶组成的温差热电堆温度跟踪控制,若采用普通精度的PID控制器还有实现高精度的温度跟踪控制,通常需要增加外围辅助技术手段,一是通过增加热电偶对数来增大温差电压信号,但这种方式工程实现难度较大且带来导线漏热问题,二是采用较高品质的直流信号放大器对温差电压信号进行放大,这同时增加了控制设备的复杂程度和造价。 对于采用热电阻温度传感器进行温度跟踪控制,以往的实现方法是采用复杂的惠斯登电桥(wheatstone bridge)将两只热电阻温度传感器的电阻差转换为电压信号,这同样增加了控制设备的复杂程度和造价。 由此可见,采用VPC 2021系列多功能超高精度PID调节器,可直接与相应的温度传感器进行连接,简化了温度跟踪控制的实现难度和装置的体积,更主要的是超高精度的数据采集和控制可大幅提高温度跟踪的控制精度。[align=center]~~~~~~~~~~~~~~[/align][align=center][/align][align=center][/align]

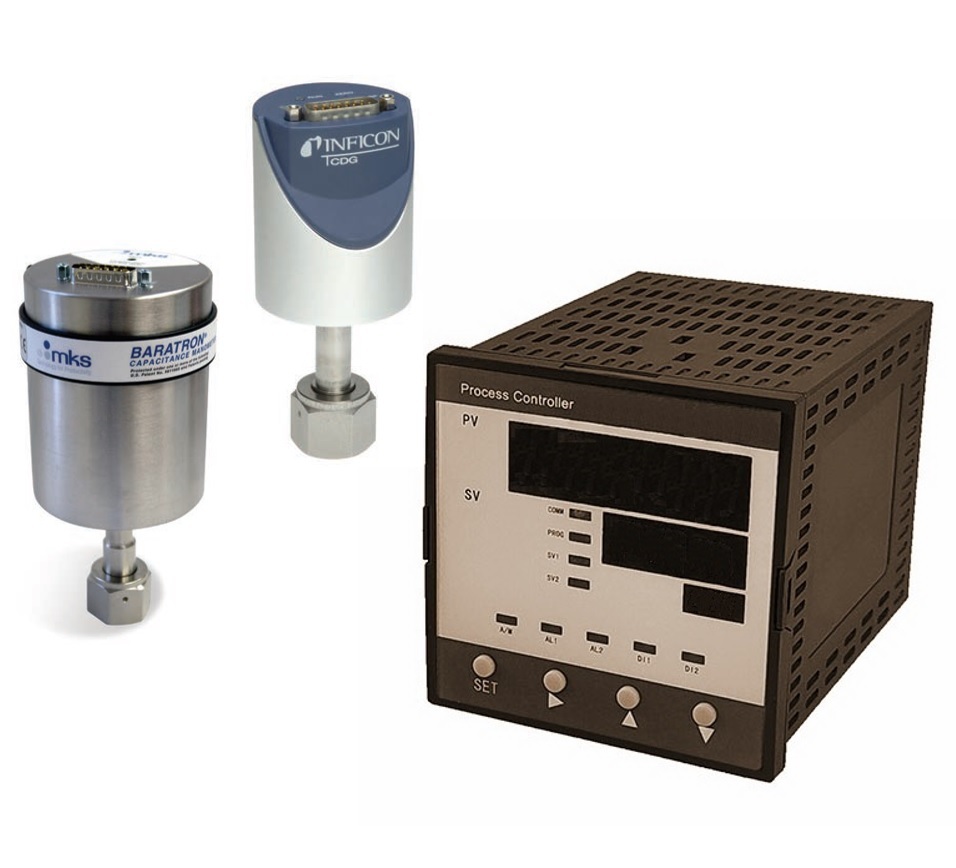
[align=center][img=,599,441]https://ng1.17img.cn/bbsfiles/images/2021/06/202106200929562418_9505_3384_3.png!w599x441.jpg[/img][/align][size=18px][color=#990000]一、简介[/color][/size] 真空压力控制器是指以气体管道或容器中的真空度(压力或压强)作为被控制量的反馈控制仪器,其整个控制回路是闭环的,控制回路由真空度传感器、真空压力控制器和电动调节阀组成。 依阳公司的VPC2021系列控制器是一种强大的多功能高度智能化的真空压力测量和过程控制仪器,采用了24位数据采集和人工智能PID控制技术,可与各种型号的真空压力传感器(真空计)、流量计、温度传感器、电动调节阀门和加热器等连接,可实现高精度真空压力(压强)、流量和温度等参量的定点和程序控制,是一种替代国外高端产品的高性能和高性价比控制器。[size=18px][color=#990000]二、主要技术指标[/color][/size] (1)测量精度:±0.05%FS(24位A/D)。 (2)输入信号:32种信号输入类型(电压、电流、热电偶、热电阻),可连接众多真空压力传感器。 (3)控制输出:4种控制输出类型(模拟信号、固态继电器、继电器、可控硅),可连接众多电动调节阀。 (4)控制算法:PID控制和自整定(可存储和调用20组PID参数)。 (5)控制方式:定点和程序控制,最大可支持9条控制曲线,每条可设定24段程序曲线。 (6)控制周期:50ms。 (7)通讯方式:RS 485和以太网通讯。 (8)供电电源:交流(86-260V)或直流24V。 (9)外形尺寸: 96×96×136.5mm (开孔尺寸92×92mm)。[size=18px][color=#990000]三、特点和优势[/color][/size] (1)高精度24位数据采集,使得此系列控制器具有高精度的控制能力。 (2)具有各种不同类型信号的输入功能,可覆盖多种测量传感器,既可连接真空计用来控制真空压力和压强,也可用来控制其它变量,如连接流量计用来控制流量、连接温度传感器用来进行温度控制等。 (3)可连接和控制几乎所有的电动调节阀和数字控制阀门,也可连接控制各种加热装置,结合传感器由此组成可靠的闭环控制系统。 (4)控制器体积小巧和使用灵活,即可独立做为面板型控制器使用,也可集成在测试系统整机中使用。 (5)采用了标准的MODBUS通讯协议,便于控制器与上位机通讯和进行二次开发。 (6)具有2路输出功能,可实现真空压力的两种控制模式,一种是可变气流量(上游控制)压强控制模式,另一种是可变通导(下游控制)流量调节模式。[align=center][color=#990000][img=,300,253]https://ng1.17img.cn/bbsfiles/images/2021/06/202106200932222782_1134_3384_3.png!w300x253.jpg[/img][/color][/align][align=center][color=#990000]上游控制压强模式[/color][/align][align=center][color=#990000][img=,300,252]https://ng1.17img.cn/bbsfiles/images/2021/06/202106200932370447_2503_3384_3.png!w300x252.jpg[/img][/color][/align][align=center][color=#990000]下游控制压强模式[/color][/align][align=center][color=#990000][img=,300,249]https://ng1.17img.cn/bbsfiles/images/2021/06/202106200932454481_7140_3384_3.png!w300x249.jpg[/img][/color][/align][align=center][color=#990000]上游和下游同时控制的双向模式[/color][/align][size=18px][color=#990000]四、外形和开孔尺寸[/color][/size][align=center][img=,690,317]https://ng1.17img.cn/bbsfiles/images/2021/06/202106200932536698_9309_3384_3.png!w690x317.jpg[/img][/align][align=center]~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~[/align]
改造升级方案加热炉的改造将原有的一个固定对开式电阻加热炉,改造升级为两个移动对开式电阻加热炉。具体改造方法是在试验机上增加旋转臂炉架,如所示。旋转臂炉架分前臂和后臂两部分,分别与试验机底座上的立柱和加热炉连接。通过调节旋转臂炉架的位置不仅能相对试验机调整加热炉的高度,而且能方便地将高温炉炉膛和试验机的夹头中心轴线调整到适当的位置。 可旋转的对开式电阻加热炉示意图两个可移动对开式电阻加热炉的主要参数如下:外形尺寸320mm440mm,炉膛尺寸80mm320mm,均热带150mm,加热炉上、中和下三段发热体(镍铬电热合金丝)的直径均为1.0mm,绕制成螺旋体。加热炉上、中和下三段发热体的最大功率分别为1000,2000和1000W,试样上绑扎热电偶(K型热电偶)与加热炉上、中和下三段发热体和各段温度控制器对应。高温拉伸夹具的改造改造前拉杆和试验机保持相对的固定关系,在进行完一次高温拉伸试验后要等待高温拉杆冷却到室温状态(或接近室温)后,才能进行下一次高温拉伸试验的控温过程。为提高工作效率,对试验机的高温拉伸夹具也进行了改造。重新设计了高温拉伸夹具,在夹具的上部分增加隔热板,在隔热板上增加可以调节高度的悬挂固定杆,从而有效地解决了高温拉杆和试验拉棒在高温环境中产生的热膨胀变形问题。悬挂固定杆(根据不同试样的长度调节以保证试样位于加热炉的中央)可以保证高温夹具位置在高温炉中保持相对固定,解决了不同试样造成的在加热炉内的相对位置不同的问题,提高了控温过程中的精度。另外,加入悬挂固定杆后,相当于增加了一个把手,实现了在高温试验过程结束后将已拉断试样快速拿出,将另一支含有高温试样的拉杆装入加热炉内,从而有效地提高了加热炉的利用效率。 同时把以上设计为两个可以移动的加热炉,在试验机后侧两端分别增加一个支柱,可以再次提高一倍的工作效率。最后,将高温夹具设计为上下两部分可以与拉伸试验机分离的结构部件,待保温结束后再与拉伸试验机连接进行高温拉伸试验,其他时间可以利用该试验机进行常温拉伸等试验,从而可以实现试验机的最大利用率。温度控制器的升级该试验机高温装置原温度控制仪表功能很简单,主要存在如下缺点:由于其控制方式为加热、保持和停止三位式控制,存在着温度控制波动大、温度控制精度差和加热功率不可调节等缺点,因而能源浪费大,加热效率低;该温度控制仪表老化严重,存在着温度控制失灵等故障,仪表控制精度难以满足相关高温拉伸试验标准的精度要求,而且此仪表要求日常频繁维护。因此,对试验机高温拉伸装置中的温度控制器进行了升级,优化了控制器的控制参数。通过调研,笔者决定采用国产宇电A1-808P仪表替代原控制仪表,主要增加了程序控制和手动调节等方便试验控制的功能。A1-808P仪表属于智能型控制仪表,在整个温度控制中可以人工干涉控制参数,以保证试验的精度要求。在应用人工智能调节算法功能后,能自动学习系统特性。当自整定完成后,虽然初次控制时效果不太理想,但第二次使用时便能获得非常精确的控制。









 我要推广仪器
我要推广仪器
 下载APP
下载APP


