推荐厂家
暂无
暂无
 留言咨询
留言咨询
留言咨询
留言咨询
留言咨询
留言咨询
 留言咨询
留言咨询

 400-860-5168转4930
留言咨询
400-860-5168转4930
留言咨询
 400-860-5168转1978
留言咨询
400-860-5168转1978
留言咨询



最近在做质量控制计划,但是能做完了才发现很多标准有的已经变更,只是没有找到新标准,这种情况是否在等到标准查新,方法确认后再制定,还是按照现有的标准进行制定才能保证控制的有效性?

[align=center][img=通过超高精度真空控制提高分子蒸馏分离纯度的方法,550,392]https://ng1.17img.cn/bbsfiles/images/2022/11/202211040202188410_3231_3221506_3.jpg!w690x492.jpg[/img][/align][color=#990000]摘要:为了提升蒸馏纯度,针对现有分子蒸馏中气体流量计式真空度控制系统存在精度较差和响应速度慢的问题,本文提出了更高精度的真空度控制解决方案。解决方案采用更直接、精密和快速的电动针阀来代替现有的气体质量流量计,并同时使用精度更高的薄膜电容规和24位AD、16位DA控制器,可实现任意设定真空度下±0.5%的控制精度,同时对温度等因素所带来的真空度变化有极快的响应,可保证分子蒸馏过程中真空控制的高精度和稳定性。[/color][align=center][color=#990000]~~~~~~~~~~~~~~~~~~~~~~~~~[/color][/align][color=#990000][size=18px]一、问题的提出[/size][/color]分子蒸馏是一种特殊的液-液分离技术,它不同于传统蒸馏依靠沸点差分离原理,而是靠不同物质分子运动平均自由程的差别实现分离。当液体混合物沿加热板流动并被加热,轻、重分子会逸出液面而进入[url=https://insevent.instrument.com.cn/t/Mp][color=#3333ff]气相[/color][/url],由于轻、重分子的自由程不同,因此,不同物质的分子从液面逸出后移动距离不同,若能恰当地设置一块冷凝板,则轻分子达到冷凝板被冷凝排出,而重分子达不到冷凝板沿混合液排出,由此达到物质分离的目的。短程蒸馏器是一个工作在0.001~1mbar(0.1~100Pa)绝对压力下热分离技术过程,它较低的沸腾温度,非常适合热敏性和高沸点物。在分子蒸馏工艺中,真空度的控制精度决定了分离物质的纯度,目前绝大多数分子蒸馏设备中真空度控制系统普遍还都采用液环真空泵与旋片式真空泵结合气体流量计的技术,这种通过气体流量计调节进气流量的方法无法实现高精度的真空度稳定控制,具体是以下几方面原因:(1)分子蒸馏过程的真空度变化范围一般为0.1~100Pa,这种高真空范围对气体流量计的真空漏率有较高要求,一般气体流量计很难满足要求,必须使用专门用于高真空的气体流量计。(2)气体流量计的调节精细度普遍较粗,如果要实现高精密的气体流量调节,同样要使用高档更精密的气体流量计。(3)通常气体流量计的响应速度比较慢,很难实现在1秒之内完成全闭到全关的动作时间。(4)多数分子蒸馏中的真空传感器普遍采用精度较差的数字皮拉尼电阻规和电热偶规等。(5)绝大多数调节气体流量计的PID控制器精度较差,多为12位AD和DA转换器,极少用到16位的AD和DA转换器,PID控制器的精度是决定分子蒸馏真空度控制精度的关键。为了提升蒸馏纯度,针对上述现有分子蒸馏中气体流量计式真空度控制系统存在的问题,本文提出了更高精度真空度控制的解决方案。解决方案将采用更直接、精密和快速的电动针阀来代替现有的气体质量流量计,并同时使用精度更高的薄膜电容规和24位AD、16位DA控制器,由此可实现分子蒸馏工艺中任意设定真空度下±0.5%的控制精度,并对温度等因素所带来的真空度变化有极快的响应,有效保证分子蒸馏过程中真空度的高精度和高稳定性。[size=18px][color=#990000]二、解决方案[/color][/size]通过上述分析可以看出,限制现有短程分子蒸馏工艺真空度控制精度的主要因素分别是:(1)气体质量流量计调节精度和响应速度。(2)真空度传感器的测量精度。(3)PID控制器的测量和控制精度。为解决上述问题,本文提出的具体解决方案是采用相应的三个替换装置,如图1所示。[align=center][color=#990000][img=短程分子蒸馏高精度真空度控制装置,690,282]https://ng1.17img.cn/bbsfiles/images/2022/11/202211040201378335_1412_3221506_3.jpg!w690x282.jpg[/img][/color][/align][align=center][color=#990000]图1 短程分子蒸馏高精度真空度控制装置[/color][/align]如图1所示,为提高蒸馏纯度,实现高精度真空度控制,解决方案采用了以下三个装置:[color=#990000](1)采用高速电动针阀代替气体质量流量计[/color]分子蒸馏高真空度控制的基本原理是调节蒸馏器的进气流量和出气流量并达到一个动态平衡,所以这里的技术关键是如何实现进气流量的精密调节。尽管气体质量流量计可以进行进气流量调节,但采用的是电磁阀技术,有着较大的迟滞现象和较慢的响应速度,这些都会影响真空度的控制精度。解决方案中所采用的高速电动针阀是一种高速步进电机驱动的纯机械式针型阀,在大幅度减少迟滞误差的同时,还将整体响应时间缩短到了800微秒,同时精细步长可实现阀门的快速精密调节。驱动控制只需采用0-10V的模拟电压,整体结构简单且可靠性强。多个规格的电动针阀具有不同的气体流量调节能力,可满足不同容积的蒸馏器的真空度控制,同时还可以采用FFKM全氟醚橡胶密封提高耐腐蚀性。[color=#990000](2)采用薄膜电容规代替皮拉尼电阻规和电热偶规[/color]薄膜电容规的测量精度要远高于皮拉尼电阻规和热偶规,在任意真空度下其精度都可以达到±0.25%。那么对于短程蒸馏器0.001~1mbar(0.1~100Pa)的真空度量程内,可直接选择一只1Torr的薄膜电容规即可满足全量程的真空度测量,如果为了保证0.1~1Pa范围内的测量精度,还可以再补充一只0.1Torr的薄膜电容规。这样,通过两只不同量程的薄膜电容规可覆盖全真空度范围内的准确测量。[color=#990000](3)采用超过精度真空控制器代替普通精度PID控制器[/color]在任何PID反馈式闭环控制系统中,无论传感器和执行器精度多高,最终的控制精度都需要控制器的精度予以保证,为此,在解决方案中采用了超高精度的PID真空控制器。此超高精度PID真空度控制器具有24位AD和16位DA,采用了双精度浮点运算可实现0.01%的最小输出百分比,这是目前国内外最高技术指标的工业用PID控制器。采用此真空控制器可充分发挥电动针阀执行器和薄膜电容规真空传感器的精度优势,而且此系列控制器具有单通道和双通道不同型号。单通道控制器是可编程PID控制器,突出特点是可以进行不同量程双真空计的自动切换来实现全量程自动控制。双通道控制器是一种定点控制器,两个通道可以分别独立控制真空度和温度。[size=18px][color=#990000]三、结论[/color][/size]新型的真空控制系统对短程分子蒸馏工艺的真空度控制过程进行了优化,对其中的真空度控制系统做出了以下三方面的改进:(1)采用电动针阀代替气体质量流量计,提高了进气流量调节执行器的精度。(2)采用薄膜电容规代替拉尼电阻规和电热偶规,提高了真空度测量的精度。(3)采用真空控制器代替传统的PID控制器,提高了PID控制精度,并扩展了控制功能,可实现双传感器自动切换和两个工艺参数同时控制。总之,通过以上改进可大幅提高短程分子蒸馏工艺的真空度控制水平,通过大量考核试验和实际应用已经证明,此解决方案成熟度很高,在全真空度范围内可轻松实现±0.5%的控制精度,如果采用更高精度的真空计,此解决方案可进一步达到±0.1%的控制精度。[align=center][/align][align=center]~~~~~~~~~~~~~~~~~~~~~~[/align]
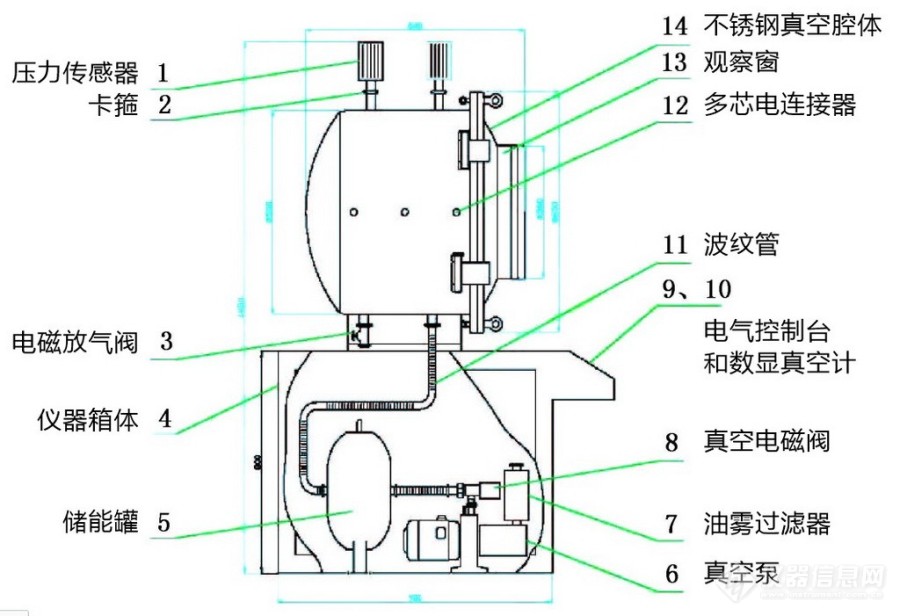
[color=#990000]摘要:针对上一代探空仪检定用低压环境模拟舱压力控制系统控制精度和稳定性差、压力传感器和控制系统配置不合理等问题,用户提出升级改造要求。本文介绍了新一代低压环境模拟舱压力控制系统的实施方案,采用了双向控制模式,进行了方案验证试验,试验结果证明控制精度和稳定性都大幅提高。关键词:低压模拟舱,探空仪,压力控制,电动针阀,电动球阀,上游模式,下游模式,PID控制器[/color][align=center]~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~[/align] [size=18px][color=#990000]一、问题的提出[/color][/size]检定探空仪的重要手段之一是在地面进行低压环境模拟舱的测试,在用的低压环境模拟舱结构如图1所示。[align=center][color=#990000][img=低气压环境模拟舱压力控制,550,376]https://ng1.17img.cn/bbsfiles/images/2022/01/202201061504557090_7216_3384_3.jpg!w690x472.jpg[/img][/color][/align][align=center][color=#990000]图1 低压环境模拟舱结构示意图[/color][/align]此低压环境模拟舱使用过程中存在压力控制波动较大的问题,越靠近1个大气压时波动越大,通过分析认为主要是以下几方面原因引起:(1)压力传感器选择不合理,在全量程压力范围内传感器误差所占比例并不相同,从而显示出靠近1个大气压时波动大和远离1个大气压时波动小的现象,但实际上整体都存在较大波动,只是压力传感器在1个大气压附近精度最高,而在远离1个大气压处压力传感器误差已经完全涵盖了压力波动范围。(2)压力控制采用的是开关控制模式,真空泵和电磁阀根据压力设定值大小同时开启或关闭,尽管增加了储气罐作为缓冲,但这种半自动控制模式很难实现压力的准确恒定。(3)控制器并没有采用PID自动控制方式,也是影响压力控制精度的主要原因。综上分析,针对上一代探空仪检定用低压环境模拟舱压力控制系统控制精度和稳定性差、压力传感器和控制系统配置不合理等问题,用户提出升级改造要求。本文将介绍新一代低压环境模拟舱压力控制系统的实施方案,拟采用双向控制模式,并进行方案验证试验,由此证明控制精度和稳定性能大幅提高。[size=18px][color=#990000]二、压力控制系统升级改造方案[/color][/size]探空仪检定用低压环境模拟舱工作的绝对压力范围为1torr~760torr,要求在此范围内模拟舱的压力可以在任意设定点上准确恒定,甚至要求可以按照设定变压速率进行控制。为此,具体的升级改造方案是在原压力控制系统的基础上,保留真空泵和真空电磁阀,更换压力传感器和控制器,去掉储能罐,增加数控的进气阀和排气阀,具体方案如下:(1)采用10torr和1000torr两个不同量程的电容压力计来覆盖整个低气压范围的测量,从而保证全量程的测量精度。(2)采用高精度PID真空压力控制器,以匹配电容压力计的测量精度和保证控制精度。(3)分别真空腔体的进气口和排气口安装电动针阀和电动球阀,电动针阀直接安装在进气口处,电动球阀安装在排气口和真空泵的电磁阀之间。(4)控制方式分别采用上游模式和下游模式,上游模式用来控制10torr以下气压,下游控制用来控制10~760torr范围气压。(5)如图2所示,上游模式是维持上游压力和出气口流量恒定,通过调节进气口流量控制仓室压力。(6)如图3所示,下游模式是维持上游压力和进气口流量恒定,通过调节排气口流量控制仓室压力。[align=center][color=#990000][img=低气压环境模拟舱压力控制,400,421]https://ng1.17img.cn/bbsfiles/images/2022/01/202201061506055621_2789_3384_3.jpg!w400x421.jpg[/img][/color][/align][align=center][color=#990000]图2 低气压上游控制模式[/color][/align][align=center][color=#990000][img=低气压环境模拟舱压力控制,450,393]https://ng1.17img.cn/bbsfiles/images/2022/01/202201061506206214_771_3384_3.jpg!w450x393.jpg[/img][/color][/align][align=center][color=#990000]图3 低气压下游控制模式[/color][/align][size=18px][color=#990000]三、方案验证试验[/color][/size]针对上述两种控制模式,分别采用1torr和1000torr两只电容压力计、电动针阀、电动球阀和24位高精度压力控制器进行了考核试验,试验用的真空腔体内部空间为400×400×500mm,试验装置如图4和图5所示。[align=center][color=#990000][img=低气压环境模拟舱压力控制,550,369]https://ng1.17img.cn/bbsfiles/images/2022/01/202201061506318858_3696_3384_3.jpg!w690x464.jpg[/img][/color][/align][align=center][color=#990000]图4 低气压上游控制模式考核试验装置[/color][/align][align=center][color=#990000][img=低气压环境模拟舱压力控制,550,339]https://ng1.17img.cn/bbsfiles/images/2022/01/202201061506474377_3818_3384_3.jpg!w690x426.jpg[/img][/color][/align][align=center][color=#990000]图5 低气压下游控制模式考核试验装置[/color][/align]在上游模式试验过程中,首先开启真空泵后使其全速抽气,然后在 68Pa 左右对控制器进行 PID参数自整定。自整定完成后,分别对 12、27、40、53、67、80、93 和 107Pa共8个设定点进行了控制,整个控制过程中的气压变化如图6所示。在下游模式试验过程中,首先开启真空泵后使其全速抽气,并将进气阀调节到微量进气的位置,然后在300torr左右对控制器进行PID参数自整定。自整定完成后,分别对 70、 200、 300、450 和 600Torr 共5个设定点进行了控制,整个控制过程中的气压变化如图7所示。 [align=center][color=#990000][img=低气压环境模拟舱压力控制,550,333]https://ng1.17img.cn/bbsfiles/images/2022/01/202201061507110485_1025_3384_3.jpg!w690x418.jpg[/img][/color][/align][align=center][color=#990000]图6 上游模式低气压定点控制考核试验曲线[/color][/align][align=center][color=#990000][img=低气压环境模拟舱压力控制,550,327]https://ng1.17img.cn/bbsfiles/images/2022/01/202201061507246957_2391_3384_3.jpg!w690x411.jpg[/img][/color][/align][align=center][color=#990000]图7 下游模式低气压定点控制考核试验曲线[/color][/align]将上述不同低气压恒定点处的控制效果以波动率来表示,则得到图8和图9所示的整个范围内的波动率分布。从波动率分布图可以看出,在整个低气压的全量程范围内,波动率可以精确控制在±1%范围,在12Pa处出现的较大波动,是因为采用 68Pa处自整定获得的PID参数并不合理,需进行单独的PID参数自整定。 [align=center][color=#990000][img=低气压环境模拟舱压力控制,550,309]https://ng1.17img.cn/bbsfiles/images/2022/01/202201061507435250_4590_3384_3.jpg!w690x388.jpg[/img][/color][/align][align=center][color=#990000]图8 上游模式低气压定点控制考核试验曲线[/color][/align][align=center][color=#990000][img=低气压环境模拟舱压力控制,550,340]https://ng1.17img.cn/bbsfiles/images/2022/01/202201061507565906_1701_3384_3.jpg!w690x427.jpg[/img][/color][/align][align=center][color=#990000]图9 下游模式低气压定点控制考核试验曲线[/color][/align]从上述考核试验结果可以看出,升级改造后的控制方法可以将压力控制精度和稳定性提高五倍以上,并大幅提高了低压环境模拟仓自动化水平和可靠性。[align=center]=======================================================================[/align]









 我要推广仪器
我要推广仪器
 下载APP
下载APP