
[align=left][font=宋体][color=black]光电液位传感器是一种常用的传感器设备,用于检测液体的水位高低。在安装光电液位传感器时,其位置和方向对于检测精度有着重要的影响。[/color][/font][/align][align=left][font=宋体][color=black] [/color][/font][/align][align=left][font=宋体][color=black]当光电液位传感器朝上或朝下安装时,液位检测精度可达到正负1mm。这是因为在这种安装状态下,传感器内部的发射管和接收管处于同一水平线上。当液位上升或下降时,液体会同时高于或低于发射管和接收管的位置,从而实现了较高的检测精度。[/color][/font][/align][align=center][font=宋体][color=black] [img=,690,495]https://ng1.17img.cn/bbsfiles/images/2023/07/202307311634578403_6660_4008598_3.jpg!w690x495.jpg[/img][/color][/font][/align][align=left][font=宋体][color=black]然而,如果将光电液位传感器安装在侧面,则很难实现正负1mm的精度。这是因为在侧面安装时,传感器内部的发射管和接收管无法保持在同一水平线上。由于传感器安装时需要拧进水箱,导致发射管和接收管的位置无法保持水平,从而影响了检测精度。因此,斜置安装时传感器的精度通常在正负2mm左右。[/color][/font][/align][align=left][font=宋体][color=black] [/color][/font][/align][align=left][font=宋体][color=black][url=https://www.eptsz.com]光电液位传感器[/url]检测距离,光电液位传感器的安装位置和方向对于检测精度有着重要的影响。朝上或朝下安装方式可以实现正负1mm的精度,而侧面安装方式则通常达不到这样的精度要求。用户在选择光电液位传感器时,要根据实际需求和精度要求来确定合适的安装方式,以确保准确的液位检测。[/color][/font][/align]
工业测距模块(工业传感器)的运用领域在哪些方面呢?各种接口之间的转换?RS232接口?

您好我公司研发生产[img]file:///C:\Users\27312\Documents\Tencent Files\2366396868\Image\Group\}4%WXMXO0DSY%_G0KA}EZ~2.png[/img]测距避障传感器的,应用范围无人飞机,AGV搬运机器人,扫地机器人,电子围栏,汽车防撞等领域。我司是属于研发生产型企业。研发团队实力雄厚,如需进一步了解请致电黄经理:微信同号18689274020;QQ2366396868 我们将竭诚为您服务!!![img=,566,792]http://ng1.17img.cn/bbsfiles/images/2017/11/201711171656_01_3324719_3.png!w566x792.jpg[/img][img=,599,501]http://ng1.17img.cn/bbsfiles/images/2017/11/201711171656_02_3324719_3.png!w599x501.jpg[/img][img=,599,501]http://ng1.17img.cn/bbsfiles/images/2017/11/201711171656_02_3324719_3.png!w599x501.jpg[/img][img=,566,792]http://ng1.17img.cn/bbsfiles/images/2017/11/201711171656_01_3324719_3.png!w566x792.jpg[/img][img=,599,501]http://ng1.17img.cn/bbsfiles/images/2017/11/201711171656_02_3324719_3.png!w599x501.jpg[/img][img=,690,388]http://ng1.17img.cn/bbsfiles/images/2017/11/201711171656_03_3324719_3.jpg!w690x388.jpg[/img][img=激光L-10,566,792]http://ng1.17img.cn/bbsfiles/images/2017/11/201711171656_01_3324719_3.png!w566x792.jpg[/img][img=激光测距导航模块,599,501]http://ng1.17img.cn/bbsfiles/images/2017/11/201711171656_02_3324719_3.png!w599x501.jpg[/img][img=激光测距精度1mm,690,388]http://ng1.17img.cn/bbsfiles/images/2017/11/201711171656_03_3324719_3.jpg!w690x388.jpg[/img][img=激光L-10,566,792]http://ng1.17img.cn/bbsfiles/images/2017/11/201711171656_01_3324719_3.png!w566x792.jpg[/img][img=激光测距导航模块,599,501]http://ng1.17img.cn/bbsfiles/images/2017/11/201711171656_02_3324719_3.png!w599x501.jpg[/img][img=激光测距精度1mm,690,388]http://ng1.17img.cn/bbsfiles/images/2017/11/201711171656_03_3324719_3.jpg!w690x388.jpg[/img]
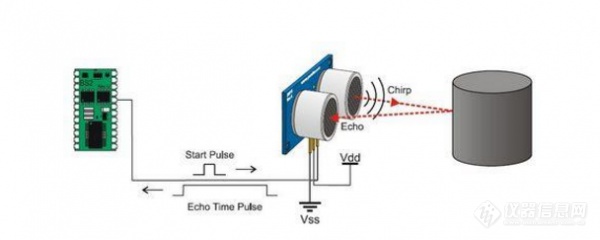
随着计算机技术、传感器技术、人工智能的发展,移动机器的避障及自主导航技术已经取得了丰硕的研究成果,应用领域也在不断地扩大,应用复杂程度也越来越高。移动机器人的自主寻路要求已经从之前简单的功能实现提升到可靠性、通用性、高效率上来,因此对其相关技术提出了更高的要求。避障可以说是各种机器人最基本的功能,不然机器人一走动就碰到花花草草就不好了。机器人并不一定要通过视觉感知自己前方是否有障碍物,它们也可以通过触觉或像蝙蝠那样通过声波感知。因此,检测机器人前方是否存在障碍物的传感器,可以分为接触式和非接触式的。[align=center][img=,600,240]http://ng1.17img.cn/bbsfiles/images/2018/01/201801221518546287_2141_3345088_3.png!w600x240.jpg[/img][/align]接触式测障传感器便是碰撞开关(图1)。碰撞开关的工作原理非常简单,完全依靠内部的机械结构来完成电路的导通和中断。当碰撞开关的外部探测臂受到碰撞,探测臂受力下压,带动碰撞开关内部的簧片拨动,从而电路的导通状态发生改变(图2)。[align=center][img=,342,300]http://ng1.17img.cn/bbsfiles/images/2018/01/201801221519129947_2908_3345088_3.png!w342x300.jpg[/img][/align]非接触式测障开关一般的工作原理与声纳和雷达相似,发射声波或某种射线,遇到障碍物,声波或射线被反射回来,并被传感器接收,这时传感器就认为发现了障碍物。此外超声波传感器也是移动机器人避障、测距常用传感器之一。超声波传感器是一个电子模块,测量距离在3cm到400cm之间。它可以用于帮助机器人避开障碍物,或用于其他相关项目的距离测量和避障工程。超生波传感器检测距离原理是测出发出超声波并在发射时开始计时,超声波在空中传播,在遇到障碍物时立即返回,超声波接收器接收到反射波时立即停止计时。 声波在空中的传播速度为340米/秒。 使用定时器记录的时间t计算出发点到障碍物的距离s,即s = 340×t / 2。由于超声波在空气中的速度与温湿度有关,在比较精确的测量中,需把温湿度的变化和其它因素考虑进去。超声波传感器一般作用距离较短,普通的有效探测距离都在5-10m之间,但是会有一个最小探测盲区,一般在几十毫米。由于超声传感器的成本低,实现方法简单,技术成熟,是移动机器人中常用的传感器。但是传感器安装在机器人上时距离地面不能太近,太近容易产生干扰信号,而且容易将可以翻越的障碍物当成无法逾越的障碍物。传感器两探头间的距离不能太远也不能太近,太远测量误差过大,太近串扰信号过强。关于机器人测距、避障工釆网小编推荐MaxBotix [b]机器人超声波传感器[/b] - MB7066[align=center][img=,291,293]http://ng1.17img.cn/bbsfiles/images/2018/01/201801221519353397_4049_3345088_3.png!w291x293.jpg[/img][/align]机器人超声波传感器 - MB7066是一种坚固的超声波传感器组件模块。这种户外传感器提供了很短的远距离探测,并在一个紧凑、坚固的PVC外壳中进行测距。超声波传感器符合IP67进水标准,符合标准电气3 / 4英寸PVC管件。是我们最长的户外、耐气候【(IP67),可选的化学抗性f选项】、超声波传感器,专为您的项目或产品的简单集成而设计其中42kHz超声波传感器测量距离物体的距离最大范围1068厘米(450英寸),操作温度为-40˚ C + 70˚ C(-40˚ F + 160˚ F)。在高输出声功率与连续可变增益、实时背景自动校准、实时波形特征波形特征分析、噪声抑制算法等都能有效地实现无噪声距离读数。即使在许多声学或电子噪声源存在的情况下,这种情况也是成立的。机器人超声波传感器是用于匹配窄传感器束模式的工厂,并提供可靠的远程探测区域。
通过测量劳易测传感器实现智能监控测量劳易测传感器能够主动检测距离,定位系统部件,并监控其他参数,以便可以智能、独立地采取行动,如在工艺过程中进行控制性干预。在此区域,您可以找到各种技术和设计,使您的系统尽可能高效、无故障地运行。劳易测致力于成为测量传感器技术驱动力之一,并以完善齐全的杰出产品功能为基础,包括...广泛的集成接口,通过这些接口,劳易测的设备可毫无问题地与各种常用现场总线系统通信。工作范围高达10,000米的创新型条码定位系统,可以毫米级的精度绝对定位移动对象。激光距离测量系统,按照PTB校准标准,最高可以毫米级的精度测量300米。测量劳易测传感器十分适合各种复杂检测任务。除了典型的功能(例如,高精度、高分辨率或大检测距离)之外,[url=http://www.china-leuze.com/]劳易测传感器[/url]还具有如集成智能数据评估和各种接口技术、运行轻松、安装简单等多种特性。这使得劳易测电子传感器对于特定的任务特别有吸引力。”
电感式IFM传感器具有工作温度范围大,高防护等级,适应严苛工业环境的需求。传感器低容差而来的可靠检测,由于应用范围广而削减存储空间。电感式IFM传感器,所有金属都具有恒定的感应范围、耐油和冷却剂。可应对所有金属的恒定检测距离、极高的开关频率。永久清晰的激光类型标签。感应范围大,正常运作。电感式IFM传感器IMC4040-CPKG/K1/US-100-DPA/IM5135时间长修正系数 1:可应对所有金属的恒定检测距离适用于输送机的长感应范。互补输出功能常开/常闭五个感应面位置可选位于角处的 LED 在任何安装位置都清晰可见

[color=#333333]科学技术的日新月异,时代正在向电子化,自动化,信息化,智能化等领域发展,近年通信技术和智能化信息处理技术也在迅猛的发展,使得自助式移动机器人技术达到使用化程度,传感器[/color][color=#333333]技术在其中发挥着重要的作用,其中,移动机器人智能化的一个重要标志便是自主导航,而实现机器人自主导航有个基本要求:避障。避障,是指移动机器人根据采集的障碍物的状态信息,在行走过程中通过传感器感知到妨碍其通行的静态和动态物体时,按照一定的方法进行有效地避障,最后达到目标点。[/color][color=#333333][img=,306,220]http://ng1.17img.cn/bbsfiles/images/2017/12/201712071533_01_3332482_3.jpg!w306x220.jpg[/img][/color][color=#333333][color=#333333]移动机器人避障与导航的实现方式:实现避障与导航的必要条件是环境感知,在未知或者是部分未知的环境下避障需要通过传感器获取周围环境信息,包括障碍物的尺寸、形状和位置等信息。避障使用的传感器主要有超声波传感器[/color][color=#333333]、视觉传感器、红外传感器、[/color]激光传感器[color=#333333]等。下面我们具体说说这几个传感器的工作原理.[/color][/color][color=#333333][color=#333333][b]超声波传感器[/b][/color][/color][color=#333333][color=#333333][color=#333333]超声波传感器检测距离原理是:测出发出超声波至再检测到发出的超声波的时间差,同时根据声速计算出物体的距离。由于超声波在空气中的速度与温湿度有关,在比较精确的测量中,需把温湿度的变化和其它因素考虑进去。[/color][/color][/color][color=#333333][color=#333333][b][color=#333333][img=,644,316]http://ng1.17img.cn/bbsfiles/images/2017/12/201712071534_01_3332482_3.jpg!w644x316.jpg[/img][/color][/b][/color][/color][color=#333333][color=#333333][color=#333333]超声波传感器一般适用于探测距离较长的应用,一般有效探测距离为32cm到6米,其中会有一个几十毫米左右的最小探测盲区。由于超声传感器的成本低、实现方法简单、技术成熟,是移动机器人中常用的传感器。此外,超声波的测量周期,不同材料对声波的反射或者吸引是不相同的,还有多个超声传感器之间有可能会互相干扰,这都是实际应用的过程中需要考虑的。[/color][/color][/color][color=#333333][b][color=#333333][color=#333333][b]红外线传感器[/b][/color][/color][/b][/color][color=#333333][color=#333333][color=#333333]红外测距都是采用三角测距的原理。红外发射器按照一定角度发射红外光束,遇到物体之后,光会反向回来,检测到反射光之后,通过结构上的几何三角关系,就可以计算出物体距离D。[/color][/color][/color][color=#333333][color=#333333][b][color=#333333][img=,372,344]http://ng1.17img.cn/bbsfiles/images/2017/12/201712071535_01_3332482_3.jpg!w372x344.jpg[/img][/color][/b][/color][/color][color=#333333][color=#333333][color=#333333]当D的距离足够近的时候,上图中L值会相当大,如果超过CCD的探测范围,这时,虽然物体很近,但是传感器反而看不到了。当物体距离D很大时,L值就会很小,测量量精度会变差。因此,常见的红外传感器 测量距离都比较近,小于超声波,同时远距离测量也有最小距离的限制。另外,对于透明的或者近似黑体的物体,红外传感器是无法检测距离的。但相对于超声来说,红外传感器具有更高的带宽。[/color][/color][/color][color=#333333][b][color=#333333][color=#333333][b]激光传感器[/b][/color][/color][/b][/color][color=#333333][color=#333333][color=#333333]常见的激光雷达是基于飞行时间的(ToF,time of flight),通过测量激光的飞行时间来进行测距d=ct/2,类似于前面提到的超声测距公式,其中d是距离,c是光速,t是从发射到接收的时间间隔。激光雷达包括发射器和接收器 ,发射器用激光照射目标,接收器接收反向回的光波。机械式的激光雷达包括一个带有镜子的机械机构,镜子的旋转使得光束可以覆盖 一个平面,这样我们就可以测量到一个平面上的距离信息。 对飞行时间的测量也有不同的方法,比如使用脉冲激光,然后类似前面讲的超声方案,直接测量占用的时间,但因为光速远高于声速,需要非常高精度的时间测量元件,所以非常昂贵;另一种发射调频后的连续激光波,通过测量接收到的反射波之间的差频来测量时间。[/color][/color][/color][color=#333333][color=#333333][b][color=#333333][img=,474,378]http://ng1.17img.cn/bbsfiles/images/2017/12/201712071536_01_3332482_3.jpg!w474x378.jpg[/img][/color][/b][/color][/color][color=#333333][color=#333333][b][color=#333333][b]视觉传感器[/b][/color][/b][/color][/color][color=#333333][color=#333333][color=#333333]视觉传感器是指:通过对摄像机拍摄到的图像进行图像处理,来计算对象物的特征量(面积、重心、长度、位置等),并输出数据和判断结果的传感器。[/color][/color][/color][color=#333333][b][color=#333333][b][color=#333333][img=,405,340]http://ng1.17img.cn/bbsfiles/images/2017/12/201712071537_01_3332482_3.jpg!w405x340.jpg[/img][/color][/b][/color][/b][/color][color=#333333][color=#333333][color=#333333]以上几种是最常见的几种传感器 ,各有其优点和缺点,在真正实际应用的过程中,一般是综合配置使用多种不同的传感器 ,以最大化保证在各种不同的应用和环境条件下,机器人都能正确感知到障碍物信息。[/color][/color][/color]

人体接近传感器作为防御手段已逐步被人们认识和应用。例如人体接传感器在银行取款机触发监控录像、航空、航天技术,保险柜以及工业生产中都有广泛的应用。在日常生活中,如宾馆、饭店、车库的自动门,自动热风机上都有应用。在安全防盗方面,如资料 档案、财会、金融、博物馆、金库等重地,通常都装有由各种接近开关组成的防盗装置。在测量技术中,如长度,位置的测量 在控制技术中,如位移、速度、加速度的测量和控制,也都使用着大量的接近开关。为了更好地贯彻GB/T10488-1997人体接近传感器的国家标准顺利实施,使更多的人了解人体接近传感器的原理和应用,工釆网小编来具体说说接近式传感器的具体工作原理。[b]什么是人体接近传感器?[/b]人体接近传感器又称无触点接近传感器,是理想的电子开关量传感器。当金属检测体接近传感器的感应区域,开关就能无接触,无压力、无火花、迅速发出电气指令,准确反应出运动机构的位置和行程,即使用于一般的行程控制,其定位精度、操作频率、使用寿命、安装调整的方便性和对恶劣环境的适用能力,是一般机械式行程开关所不能相比的。由于接近传感器具有使用寿命长、工作可靠、重复定位精度高、无机械磨损、无火花、无噪音、抗振能力强等特点。因此它广泛地应用于机床、冶金、化工、轻纺和印刷等行业。在自动控制系统中可作为限位、计数、定位控制和自动保护环节。[b]人体接近传感器的工作原理是什么?[/b]① 人体接近传感器里有个高频率发送机,会使线圈发出高频磁场。② 被测对象接近高频磁场会使检测对象表面产生涡电流,而涡电流又会引发方向相反的磁场。③ 发送机受到涡电流引起的发磁场影响抵消而停止震动。④ 通过震动的有无使控制输出ON/OFF。 [b]接近传感器的选型和检测[/b]对于不同的材质的检测体和不同的检测距离,应选用不同类型的接近传感器,以使其在系统中具有高的性能价格比,为此在选型中应遵循以下原则:1、当检测体为金属材料时,应选用高频振荡型接近传感器,该类型接近传感器对铁镍、A3钢类检测体检测最灵敏。对铝、黄铜和不锈钢类检测体,其检测灵敏度就低。2、当检测体为非金属材料时,如;木材、纸张、塑料、玻璃和水等,应选用电容型接近传感器。3、金属体和非金属要进行远距离检测和控制时,应选用光电型接近传感器或超声波型接近传感器。目前,接近传感器在航空航天、工业生产、交通运输、消费电子等各行各业的领域中都有广泛的应用, 下面工釆网介绍两款种典型的接近式传感器,以便能为你更好的了解接近传感器的应用。MaxBotix [b]超声波人体检测传感器[/b] - MB1004[img=,205,175]http://ng1.17img.cn/bbsfiles/images/2018/01/201801101726_9586_3345088_3.jpg!w205x175.jpg[/img]LV-ProxSonar-EZ高性能接近传感器专为行人和对象检测而设计,且在同一环境 中允许多个传感器同时运行。供电2.5V~5.5V,LV-ProxSonar-EZ以其极小的 外形条件提供特定距离对象的接近检测。此外LV-ProxSonar-EZ 允许用户将多个传感器集成到单个系统中,并且很少或几乎不会受到其他超声波传感器经 常发生的相互干扰影响。LV-ProxSonar-EZ的主要特性是具备易于使用的逻辑(高/低)输出、RS232格式串 行输出。*工厂标定和测试为传感器基本标准。所以超声波人体检测传感器MB1004被广泛应用于接近区域探测、行人检测 ,展台/信息亭、机器人自动导航、自主导航、多传感器阵列等领域MaxBotix [b]高性能超声波接近传感器 -[/b] MB1444[img=,197,172]http://ng1.17img.cn/bbsfiles/images/2018/01/201801101727_7876_3345088_3.png!w197x172.jpg[/img]高性能超声波接近传感器 - MB1444中的USB微型接头与当前大部分智能手机接口匹配而且USB接口,便于安装且与电脑相连,一旦接通或上电,即获悉周围环境。接近探测范围可从1mm至设置触发距离工作频率为45KHz;探测距离为6英寸至125英寸,工作模式为自由模式运行,此外该传感器可以进行零距离对象探测。对于被检测物体可持续测量和输出接近信息并且持续可变增益用于控制和旁瓣抑制。经筛选的距离输出允许测距和多传感器操作简单的True/False输出和可选范围输出,约2.5秒的对象距离采集时间,约1.5秒的对象距离恢复时间。在受保护的室内环境、安全和HIPPA符合性应用、中自动锁电脑助手、传感器格网、信息亭和货摊、自动演示&广告、安全系统、接近区域探测、机器人测距传感器、人检测、自动导航、多传感器矩阵等多个领域中都有被应用。
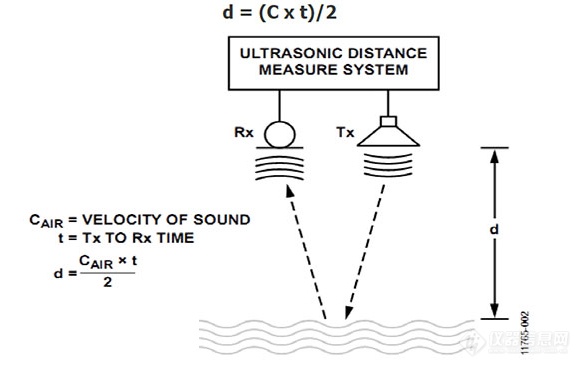
[align=left]过去,河流水位监测通常使用手动现场测量来获取数据。虽然这种方法可靠,但同时存在许多问题,例如:[/align](1)河岸上的手工测量存在一定的风险(河流深5米)。(2)在恶劣天气下不能停止工作。(3)测量值不是很准确,只能作为参考。(4)人工成本高,每天需要多个现场数据记录。所以现在测量水位都采用相应的仪器仪表,最常用的还是超声波液位传感器了,超声波液位传感器使用超声波原理,发射和接收所需的时间以及液位或距离的转换是液位监测领域中经常使用的方法。这种非接触方法稳定可靠,因此超声波液位传感器被广泛使用。[b]超声波传感器测量方法:[/b]OFweek Mall了解到超声波物位测量有多种方法,如超声脉冲回波法、共振法、频差法、超声衰减法:超声波脉冲回波方法的基本原理是超声波探头发射超声波。当超声波遇到障碍物时,它将被反射。根据当前环境中的超声波,由单片机记录超声波传输的时间和接收回波的时间。传播速度可以通过公式S = C * t / 2计算(其中S是测量距离,C是超声波传播速度,t是回波时间。)计算超声波的距离,并且获得了障碍。测试系统的距离。共振方法的基本原理是调节超声波的频率,以便在探头和液体表面之间建立驻波共振状态。此时,探针和液体表面之间的距离与介质中超声波的波长成比例。当已知超声速度时,可以从共振频率计算波长,并且可以转换从探针到液体表面的距离。频差法是让超声波探头发出调频超声波。超声波的频率随传播距离而变化,并且可以根据接收信号和发送信号之间的频率差来获得从发送到接收的时间。超声波衰减测量顾名思义,测量介质中超声波的衰减随距离而变化,液位根据接收信号与发射信号之间的衰减变化来测量。从上述方法的比较可以看出,共振法检测液位受某些特定条件的限制,需要与液体表面建立驻波关系,属于接触测量方法。频率差方法要求频率调制器产生调制频率,衰减方法需要测量超声波的衰减量。相比之下,超声脉冲回波方法不需要与液面建立驻波,并且可以实现非接触检测。因此,脉冲回波方法是最合适的方法。OFweek Mall技术工程师推荐使用MB7066超声波液位传感器进行水位监测:[b]MaxBotix 超声波液位传感器-MB7066 [/b]精准而窄的波束角分辨率是1cmIP67防尘防水标准封装超低功耗适合电池供电系统体积小、多种输出方式小、轻重量为您简单集成的项目或产品而设计快速的测量周期可测距离长达10米[img=,293,258]https://ng1.17img.cn/bbsfiles/images/2018/11/201811141618574529_7904_3422752_3.png!w293x258.jpg[/img]超声波液位传感器MB7066是一种体积小但坚固的耐风雨的超声波传感器。符合IP67防护安全等级,可以防护灰尘吸入,可以短暂浸泡。可测距离长达10米,在远距离检测和水槽液位检测中,得到很好的应用。首先,超声波传感器发出噪声脉冲,然后用户可以基于反射信号几乎实时地知道水位。用户还可以使用雷达、深度水位传感器和其他技术,为他们的应用提供最佳解决方案。当使用超声波液位传感器时,用户可以获得所有需要的数据,用于绘制、绘图、分析、 API(应用程序编程接口)转发、数据下载和短信和电子邮件提醒。相关的地方部门可以根据超声波液位传感器反馈的数据快速部署洪水监测系统,具有很高的成本效益。设备可以安装在桥、河、流和任何需要安装远程监控系统的地方。预警系统将提醒您,水位正在上升,以便保护人民和社区免受洪水侵袭。由于数据读取方便。此外,所有超声波液位传感器测量数据的历史存储在云中,用户可以随时随地访问,从而便于历史分析。相关[url=https://mall.ofweek.com/category_5.html]传感器[/url]分类:气体传感器丨氨气传感器丨二氧化硫传感器丨一氧化碳传感器丨臭氧传感器丨氧化锆氧气传感器丨空[url=https://insevent.instrument.com.cn/t/bp][color=#3333ff]气质[/color][/url]量传感器丨二氧化碳传感器丨氧气传感器丨可燃气体传感器丨酒精传感器丨PID传感器丨温湿度传感器丨湿度传感器丨光纤应变传感器丨voc传感器丨光电液位传感器丨超声波液位传感器https://mall.ofweek.com/category_136.html丨紫外线传感器丨CO2传感器丨CO传感器丨超声波传感器丨UV传感器丨光离子传感器丨氧化锆传感器丨PH传感器丨荧光氧气传感器丨流量传感器丨光纤传感器丨光纤压力传感器丨双气传感器丨PM2.5传感器
光电传感器是一种小型电子设备,它可以检测出其接收到的光强的变化。早期的用来检测物体有无的光电传感器是一种小的金属圆柱形设备,发射器带一个校准镜头,将光聚焦射向接收器,接收器出电缆将这套装置接到一个真空管放大器上。在金属圆筒内有一个小的白炽灯做为光源。这些小而坚固的白炽灯传感器就是今天光电传感器的雏形。 LED(发光二极管) 发光二极管最早出现在19世纪60年代,现在我们可以经常在电气和电子设备上看到这些二极管做为指示灯来用。LED就是一种半导体元件,其电气性能与普通二极管相同,不同之处在于当给LED通电流时,它会发光。由于LED是固态的,所以它能延长传感器的使用寿命。因而使用LED的光电传感器能被做得更小,且比白炽灯传感器更可靠。不象白炽灯那样,LED抗震动抗冲击,并且没有灯丝。另外,LED所发出的光能只相当于同尺寸白炽灯所产生光能的一部分。(激光二极管除外,它与普通LED的原理相同,但能产生几倍的光能,并能达到更远的检测距离)。LED能发射人眼看不到的红外光,也能发射可见的绿光、黄光、红光、蓝光、蓝绿光或白光。 经调制的LED传感器 1970年,人们发现LED还有一个比寿命长更好的优点,就是它能够以非常快的速度来开关,开关速度可达到KHz。将接收器的放大器调制到发射器的调制频率,那么它就只能对以此频率振动的光信号进行放大。 我们可以将光波的调制比喻成无线电波的传送和接收。将收音机调到某台,就可以忽略其他的无线电波信号。经过调制的LED发射器就类似于无线电波发射器,其接收器就相当于收音机。 人们常常有一个误解:认为由于红外光LED发出的红外光是看不到的,那么红外光的能量肯定会很强。经过调制的光电传感器的能量的大小与LED光波的波长无太大关系。一个LED发出的光能很少,经过调制才将其变得能量很高。一个未经调制的传感器只有通过使用长焦距镜头的机械屏蔽手段,使接收器只能接收到发射器发出的光,才能使其能量变得很高。相比之下,经过调制的接收器能忽略周围的光,只对自己的光或具有相同调制频率的光做出响应。 未经调制的传感器用来检测周围的光线或红外光的辐射,如刚出炉的红热瓶子,在这种应用场合如果使用其它的传感器,可能会有误动作。 如果一个金属发射出的光比周围的光强很多的话,那么它就可以被周围光源接收器可靠检测到。周围光源接收器也可以用来检测室外光。 但是并不是说经调制的传感器就一定不受周围光的干扰,当使用红外测温仪在强光环境下时就会有问题。例如,未经过调制的光电传感器,当把它直接指向阳光时,它能正常动作。我们每个人都知道,用一块有放大作用的玻璃将阳光聚集在一张纸上时,很容易就会把纸点燃。设想将玻璃替换成传感器的镜头,将纸替换成光电三极管,这样我们就很容易理解为什么将调制的接收器指向阳光时它就不能工作了,这是周围光源使其饱和了。 调制的LED改进了光电传感器的设计,增大了检测距离,扩展了光束的角度,人们逐渐接受了这种可靠易于对准的光束。到1980年,非调制的光电传感器逐步就退出了历史舞台。 红外光LED是效率最高的光束,同时也是在光谱上与光电三极管最匹配的光束。 但是有些传感器需要用来区分颜色(如色标检测),这就需要用可见光源。 在早期,色标传感器使用白炽灯做光源,使用光电池接收器,直到后来发明了高效的可见光LED。现在,多数的色标传感器都是使用经调制的各种颜色的可见光LED发射器。经调制的传感器往往牺牲了响应速度以获取更长的检测距离,这是因为检测距离是一个非常重要的参数。未经调制的传感器可以用来检测小的物体或动作非常快的物体,这些场合要求的响应速度都非常快。但是,现在高速的调制传感器也可以提供非常快的响应速度,能满足大多数的检测应用。 超声波传感器 声波传感器所发射和接收的声波,其振动频率都超过了人耳所能听到的范围。红外测温仪它是通过计算声波从发射,经被测物反射回到接收器所需要的时间,来判断物体的位置。对于对射式超声波传感器,如果物体挡住了从发射器到接收器的声波,则传感器就会检测到物体。与光电传感器不同,超声波传感器不受被测物透明度和反光率的影响,因此在许多使用超声波传感器的场合就不适合使用光电传感器来检测。 光纤 安装空间非常有限或使用环境非常恶劣的情况下,我们可以考虑使用光纤。光纤与传感器配套使用,是无源元件,另外,光纤不受任何电磁信号的干扰,并且能使传感器的电子元件与其他电的干扰相隔离。 光纤有一根塑料光芯或玻璃光芯,光芯外面包一层金属外皮。这层金属外皮的密度比光芯要低,因而折射率低。光束照在这两种材料的边界处(入射角在一定范围内,),被全部反射回来。根据光学原理,所有光束都可以由光纤来传输。 两条入射光束(入射角在接受角以内)沿光纤长度方向经多次反射后,从另一端射出。另一条入射角超出接受角范围的入射光,损失在金属外皮内。这个接受角比两倍的最大入射角略大,这是因为光纤在从空气射入密度较大的光纤材料中时会有轻微的折射。光在光纤内部的传输不受光纤是否弯曲的影响(弯曲半径要大于最小弯曲半径)。大多数光纤是可弯曲的,很容易安装在狭小的空间。 玻璃光纤 玻璃光纤由一束非常细(直径约50μm)的玻璃纤维丝组成。典型的光缆由几百根单独的带金属外皮玻璃光纤组成,光缆外部有一层护套保护。光缆的端部有各种尺寸和外形,并且浇注了坚固的透明树脂。检测面经过光学打磨,非常平滑。这道精心的打磨工艺能显著提高光纤束之间的光耦合效率。 玻璃光纤内的光纤束可以是紧凑布置的,也可随意布置。紧凑布置的玻璃光纤通常用在医疗设备或管道镜上。每一根光纤从一端到另一端都需要精心布置,这样才能在另一端得到非常清晰的图像。由于红外热像仪这种光纤费用非常昂贵并且多数的光纤应用场合并不需要得到一个非常清晰的图像,所以多数的玻璃光纤其光纤束是随意布置的,这种光纤就非常便宜了,当然其所得到的图像也只是一些光。 玻璃光纤外部的保护层通常是柔性的不锈钢护套,也有的是PVC或其他柔性塑料材料。有些特殊的光纤可用于特殊的空间或环境,其检测头做成不同的形状以适用于不同的检测要求。 玻璃光纤坚固并且性能可靠,可使用在高温和有化学成分的环境中,它可以传输可见光和红外光。常见的问题就是由于经常弯曲或弯曲半径过小而导致玻璃丝折断,对于这种应用场合,我们推荐使用塑料光纤。 塑料光纤 塑料光纤由单根的光纤束(典型光束直径为0.25到1.5mm)构成,通常有PVC外皮。它能安装在狭小的空间并且能弯成很小的角度。 多数的塑料光纤其检测头都做成探针形或带螺纹的圆柱形,另一端未做加工以方便客户根据使用将其剪短。邦纳公司的塑料光纤都配有一个光纤刀。不像玻璃光纤,塑料光纤具有较高的柔性,带防护外皮的塑料光纤适于安装在往复运动的机械结构上。塑料光纤吸收一定波长的光波,包括红外光,因而塑料光纤只能传输可见光。 与玻璃光纤相比,塑料光纤易受高温,化学物质和溶剂的影响。 对射式和直反式光纤玻璃光纤和塑料光纤既有“单根的”-对射式,也有“分叉的”-直反式。单根光纤可以将光从发射器传输到检测区域,或从检测区域传输到接收器。分叉式的光纤有两个明显的分支,可分别传输发射光和接收光,使红外热像仪传感器既可以通过一个分支将发射光传输到检测区域,同时又通过另一个分支将反射光传输回接收器。 直反式的玻璃光纤,其检测头处的光纤束是随意布置的。直反式的塑料光纤,其光纤束是沿光纤长度方向一根挨一根布置。 光纤的特殊应用 由于光纤受使用环境影响小并且抗电磁干扰,因而能被用在一些特殊的场合,如:适用于真空环境下的真空传导光纤(VFT)和适用于爆炸环境下的光纤。在这两个应用中,特制的光纤安装在特殊的环境中,经一个法兰引出来接到外面的传感器上,光纤和法兰的尺寸多种多样。本安型传感器,如NAMUR型的传感器,可直接用在特殊或有爆炸性危险的环境中。
光电传感器一般至少有9种以上传感模式,使用两个光源,有三种封装 尺寸,5种以上的检测范围,并可以使用各种安装方式、输出与工作电压的组合购买。这产生了令人困扰的种类繁多的候选传感器可能性,使人难以选择。 光电传感器主要参数 ■尺寸 ■传感模式 ■传感范围 ■安装方式 ■输出 ■工作模式 ■工作电压 ■光源 ■连接方式 ■封装材料 ■特殊功能包括: ·可处理高速和/或高温 ·逻辑控制 ·可计算机编程 ·网络兼容性 这种过剩的选择可以采用以下两种方式来缩小范围:首先需要考虑检测对象;其次是传感器的工作环境。 装箱 我们要问的第一个问题是:你究竟想让传感器检测什么?“我们是在检测瓶子,还是检测纸箱?”传感器厂商—Banner工程公司传感器应用工程师GregKnutson表示。 光学性质与物理距离将决定采用何种传感模式与哪种光源最合适。例如,在检测单色纸箱的情况下,也许可以采用廉价的、从纸箱上反射光束的散射传感器。 但当纸箱为彩色从而使反射率不同时,就不能采用以上解决方案。在这种情况下,最好的解决方案也许是采用相反或反射模式传感器。在此方案中,系统是通过屏蔽光束来工作。当纸箱到位时,光束被遮挡,从而使纸箱检测。如果没有透明的箱子,此技术应该能获得可靠的结果。目前已有好几种传感器能检测不同高度的纸箱。 距离在选择光源,例如LED或激光时起重要作用。LED虽比较便宜,但由于它是一种散射度较高的光源,因此适合短距离使用。激光可聚焦在一个点上,因此能获得传播距离更远的光束。当需要检测细微特征时,良好的聚焦也很重要。如果需要从几英尺外对准细微特征,则必须使用激光。 激光传感器要比LED要贵很多倍,不过这种差别已经被激光二极管价格的下降缩小了。虽然目前使用的激光仍然较贵,但比起过去的花销已经降低了很多。 环境挑战 选择传感器时的另一项决定因素是工作环境。一些行业(如食品与汽车行业等)的工作环境可能会很脏或很危险,或二者都有。在处理食品时,湿度可能会较高以及有很多液体。处理引擎或其他零件的汽车制造厂车间,也可能会有沙子、润滑剂和冷却剂等。在这种情况下,必须考虑传感器的环境适应性,如果传感器不能适应污垢环境就不能被使用。这种考虑还会影响所需的检测范围,因为可能需要将传感器放在恶劣环境外一个更远的位置上(而不是放在所需的位置)。如果指示灯被弄脏或信号减弱,那么能够主动告警和通知是很有帮助的。 类似的环境问题也会影响传感器的尺寸,尺寸的变化可以从比一个手指还小到比张开的手掌还大。小尺寸传感器比大尺寸传感器要贵,因为将所有部件都装入一个小空间内的成本更高。小尺寸传感器收集光线的面积更小,一次检测范围更小,光学性能更低。这些缺点必须克服,以便小尺寸传感器能更好地可用物理空间相匹配。 再如,在半导体洁净室设备中所使用的传感器虽然工作环境不恶劣,但必须在狭窄的空间内工作。其检测距离通常为数英寸,因此传感器一般都较小。这些传感器还常常使用光纤来将光线导入(或导出)检测区。 安装与价格 另一项考虑的因素是安装系统。传感器通常需要用盒子或其他方法来进行机械保护。这种机械与光学保护的成本可能要比传感器本身的成本还高,因此是购买时需考虑的一项重要因素。如果厂商拥有灵活的安装系统,以及针对传感器的保护性安装安排,则产品更容易实现,寿命也更长。 激光与专用光电传感器的价格约为150~500美元。像低级封装、标准光学性能以及有限的(或完全没有)外部调整等,都是每种传感器低端产品所具有的特征。而高端产品则拥有高级封装(如不锈钢或铝等),高光学性能以及可调增益、定时或其它选项。低端产品适合普通应用,而高端产品则可以在高速、高温或易爆等特殊环境下使用。 最后请记住,一种传感技术不可能满足应用的所有需求,如果需要改动,那么可能需要一种完全不同的传感器技术。传感器厂商—Pepperl+Fuchs公司产品经理EdMyers表示,如果厂商在同一封装与安装尺寸内提供了多种传感器技术,则转向一种新的方法并不难。如果真是这样,那么随着需求的改变,很容易从一种传感器技术转向另一种传感器技术。

[size=24px][font=宋体]红外接近传感器是用来检测物体的,利用红外的物理特性来测量感应强度。在日常生活中被广泛应用,如家用电器、智能洗手液机、感应开关等设备。[/font][img=,690,275]https://ng1.17img.cn/bbsfiles/images/2022/10/202210241433390457_4745_4008598_3.jpg!w690x275.jpg[/img][font=宋体]以洗手液机为例,传统的洗手液是通过按压的方式出液的,而智能洗手液机则是通过感应手而出液,这样不仅方便卫生,还减少了交叉感染。将红外传感器安装在洗手液机中,当手放在洗手液机的感应位置时,传感器发射管发出的光通过人手会反射到接收器上,液体就会出来。[/font][font=宋体]红外接近传感器具有防水防尘、寿命长、稳定性强、检测距离精度高、一致性强等优点,可根据应用定制。[/font][/size]
各位大侠有用过非接触式(在线式)荧光光谱仪的吗?能否给解释一下有哪些因素影响非接触式荧光光谱仪的探测距离啊?是否与荧光光谱仪的滤镜、光源的能量、荧光的存活时间有关啊?从资料上看到荧光的平均寿命(能量衰减到1/e)为十的负八次方 秒,是否可以认为荧光的传输距离只有几米(平均寿命*光速)?先谢谢各位大侠了。
用该软件测距离时,线的两端会处理两个小绿方块,测距离时是两个方块的中心对准被测物体的边缘还是两个方块的边缘对着物体的边缘?谢谢
[font=宋体][url=http://www.eptsz.com]超声波液位传感器[/url]的应用是比较广泛的,可用于家用蓄水池、热水器、水井、水槽、工业设备、水坝、河流洪水检测等。超声波传感器一般是安装在水箱顶部的,可以测试各种液体和固体(谷物、粉末、颗粒等)。[/font][font=宋体]超声波液位传感器工作原理:超声波传感器[/font]TX[font=宋体]发出超声波,遇到障碍物(液体)后被反射,被[url=http://www.eptsz.com]超声波传感器[/url][/font][font=Calibri]RX[/font][font=宋体]接收,根据[/font][font=Calibri]Time-OF-FLight(TOF)[/font][font=宋体]计算出障碍物的距离[/font][font=Calibri]d:[img=,582,368]https://ng1.17img.cn/bbsfiles/images/2022/06/202206080942505971_1277_4008598_3.png!w582x368.jpg[/img][font=宋体][font=宋体]超声波[url=http://www.eptsz.com]液位传感器[/url]优点:正负[/font]2mm[font=宋体]高精度测距,能适应强酸,强碱,盐,高温场合,采用给电源、传感器的所有进出线都具有防雷保护装置,故障率极低,实现了仪表的稳定及可靠性,使用集成的按键显示模块可快捷设置。[/font][/font][/font]
[font=&][size=18px] 商场类公共场所通常会有烘手机,将人将手放入到烘手机检测范围内,设备启动,当手抽离时,设备停止工作。这一功能通常是采用红外接近传感器实现的。[/size][/font][font=&][size=18px] [/size][/font][font=&][size=18px] 红外接近传感器包含两个主要组件,发射管与接收管,发射管的作用是发射出红外光(肉眼不可见),接收管的作用是接收光线。当传感器前面没有物体时,光线会发射在空气中;当有物体进去到传感器检测范围时,光线会反射会接收管,此时给出信号,设备根据接收到的信号实现电路控制。[/size][/font][align=center][img=,650,358]https://ng1.17img.cn/bbsfiles/images/2021/12/202112160944569561_6346_4008598_3.jpg!w650x358.jpg[/img][/align][font=&][size=18px] 如烘手机在传感器输出有物体的信号时,控制设备启动吹风;自动感应水龙头在检测到有手时,自动出水;洗手液机在检测到有手接近时,自动出洗手液。[/size][/font][align=center][img=,690,275]https://ng1.17img.cn/bbsfiles/images/2021/12/202112160945140088_6996_4008598_3.jpg!w690x275.jpg[/img][/align][size=18px] [/size][font=&][size=18px] 能点的红外接近传感器,根据各种人种(黄种人、白人、黑人)不同肤色的手,做了相关的调整测试,不仅可以兼容检测不同肤色的手,还具有阳光抗干扰性。对比与市面上容易受到阳光干扰的红外接近传感器来说,可靠性更高,且可以根据应用定制输出信号、检测距离等,应用范围更广。[/size][/font]

利用光学原理工作的光电液位传感器,避免了任何机械接触,实现了对液位的精确检测。相反,磁性浮子液位开关依靠水的浮力驱动浮子沿着液面升降,通过这种方式激活磁簧管来监测液位。然而,此类设备易受到水垢堆积、安装不当等因素的干扰,导致浮子卡死或失效。在体积和整体设计方面,光电液位传感器小巧紧凑,支持多角度安装,而磁性浮子液位开关则较为笨重,包含移动部件,整体设计上略显逊色,且安装方向受限,仅能垂直向上或向下。光电液位传感器的稳定性和可靠性也更胜一筹,它不会受到磁场、温度或振动的影响。而磁性浮子液位开关由于内置磁铁,容易受到外部磁场、温度变化和振动的干扰,影响性能甚至造成磁性丧失。[align=center][img=光电液位传感器,600,461]https://ng1.17img.cn/bbsfiles/images/2024/02/202402181606472075_7586_4008598_3.jpg!w600x461.jpg[/img][/align]光电液位传感器能够检测距离水箱底部仅1毫米的液位,表现出极高的灵敏度。反观磁性浮子液位开关,由于浮子和磁铁的质量,必须设计一定的浸没深度以保证其能够浮起,这限制了最低测量液位的高度。若尝试通过下沉安装方式解决这一问题,则需在水箱底部设置较大的凹陷区域。准确性方面,光电液位传感器在水平面测量上的精度可达±0.5毫米,而磁性浮子液位开关的精度则为±2.5毫米,显示出前者在精确度上有明显优势。从寿命来看,[url=https://www.eptsz.com]光电液位传感器[/url]的标准使用寿命可以达到50,000小时以上,远超磁性浮子液位开关的10,000至20,000次开闭寿命,展现出更长久的耐用性。
[align=left][color=#333333]光电传感器是将光信号转换为电信号的一种器件。光电传感器一般由处理通路和处理元件两部分组成。其基本原理是以光电效应为基础,把被测量的变化转换成光信号的变化,然后借助光电元件进一步将非电信号转换成电信号。[/color][/align][color=#333333] [/color][color=#333333]其工作原理基于光电效应。光电效应是指光照射在某些物质上时,物质的电子吸收光子的能量而发生了相应的电效应现象。光电效应是指用光照射某一物体,可以看作是一连串带有一定能量为的光子轰击在这个物体上,此时光子能量就传递给电子,并且是一个光子的全部能量一次性地被一个电子所吸收,电子得到光子传递的能量后其状态就会发生变化,从而使受光照射的物体产生相应的电效应。光电传感器因为采用光学原理,因此其采集结果更精准、快速。[/color][color=#333333] [/color][b][color=#333333]特点:[/color][/b][color=#333333]光电检测方法具有精度高、反应快、非接触等优点,而且可测参数多,传感器的结构简单,形式灵活多样,因此,光电式传感器在检测和控制中应用非常广泛。光电传感器是各种光电检测系统中实现光电转换的关键元件,它是把光信号(可见及紫外镭射光)转变成为电信号的器件。光电式传感器是以光电器件作为转换元件的传感器。它可用于检测直接引起光量变化的非电物理量,如光强、光照度、辐射测温、气体成分分析等;也可用来检测能转换成光量变化的其他非电量,如零件直径、表面粗糙度、应变、位移、振动、速度、加速度,以及物体的形状、工作状态的识别等。光电式传感器具有非接触、响应快、性能可靠等特点,因此应用广泛。[/color][color=#333333] [/color][b][color=#333333]工作原理:[/color][/b][color=#333333]由光通量对光电元件的作用原理不同所制成的光学测控系统是多种多样的,按光电元件(光学测控系统)输出量性质可分二类,即模拟式光电传感器和脉冲(开关)式光电传感器。模拟式光电传感器是将被测量转换[/color][color=#333333] [/color][color=#333333] [/color][b][color=#333333]光电式传感器分类:[/color][/b][color=#333333]⑴[/color][color=#333333]反光板型光电开关[/color][color=#333333]把发光器和收光器装入同一个装置内,在前方装一块反光板,利用反射原理完成光电控制作用,称为反光板反射式(或反射镜反射式)光电开关。正常情况下,发光器发出的光源被反光板反射回来再被收光器收到 一旦被检测物挡住光路,收光器收不到光时,光电开关就动作,输出一个开关控制信号。[/color][color=#333333] [/color][color=#333333]⑵[/color][color=#333333]对射型光电传感器,若把发光器和收光器分离开,就可使检测距离加大,一个发光器和一个收光器组成对射分离式光电开关,简称对射式光电开关。对射式光电开关的检测距离可达几米乃至几十米。使用对射式光电开关时把发光器和收光器分别装在检测物通过路径的两侧,检测物通过时阻挡光路,收光器就动作输出一个开关控制信号。[/color][color=#333333] [/color][color=#333333](3)槽型光电传感器[/color][color=#333333]把一个光发射器和一个接收器面对面地装在一个槽的两侧组成槽形光电。发光器能发出红外光或可见光,在无阻情况下光接收器能收到光。但当被检测物体从槽中通过时,光被遮挡,光电开关便动作,输出一个开关控制信号,切断或接通负载电流,从而完成一次控制动作。槽形开关的检测距离因为受整体结构的限制一般只有几厘米。[/color][color=#333333] [/color][color=#333333]⑷[/color][color=#333333]扩散反射型光电开关[/color][color=#333333]扩散反射型光电开关的检测头里也装有一个发光器和一个收光器,但扩散反射型光电开关前方没有反光板。正常情况下发光器发出的光收光器是找不到的。在检测时,当检测物通过时挡住了光,并把光部分反射回来,收光器就收到光信号,输出一个开关信号。[/color][color=#333333] [/color][b][color=#333333] [/color][/b][color=#333333]光电传感器是通过把光强度的变化转换成电信号的变化来实现控制的。[/color][color=#333333]光电传感器在一般情况下,有三部分构成,它们分为:发送器、接收器和检测电路。[/color][color=#333333]发送器对准目标发射光束,发射的光束一般来源于半导体光源,发光二极管(LED)、激光二极管及红外发射二极管。光束不间断地发射,或者改变脉冲宽度。接收器有光电二极管、光电三极管、光电池组成。在接收器的前面,装有光学元件如透镜和光圈等。在其后面是检测电路,它能滤出有效信号和应用该信号。如光电[/color][url=http://www.eptsz.com/Index.aspx][color=#333333]液位传感器[/color][/url][color=#333333]。[/color][b][color=#333333]没有信号输出的原因[/color][/b][color=#333333]放置问题:检测物体必须在传感器可以检测的区域内,也就是光电可以感知的范围内。[/color][color=#333333] [/color][color=#333333]对准问题:对射型的投光部和受光部光轴必须对准,对应的回归反射型的探头部分和反光板光轴必须对准。[/color][color=#333333] [/color][color=#333333]环境干扰问题:现场环境有粉尘,就需要我们定期清理光电传感器探头表面;或者是多个传感器紧密安装,会互相产生干扰;还有一种影响比较大的是电气干扰,如果周围有大功率设备,产生干扰时必须要有相应的抗干扰措施。[/color][color=#333333] [/color][color=#333333]接线或配置的问题:对于对射型光电传感器必须由投光部和受光部组合使用,两端都需要供电;[/color][color=#333333] [/color][color=#333333]接线问题:同时,用户必须给传感器提供稳定电源,如果是直流供电,必须确认正负极链接正确。[/color]

[font=&][color=#333333]涂鸦超声波液位传感器是一种先进的技术,用于检测液体的水位。它采用超声波技术,通过发射和接收超声波信号来测量液体的高度。这种传感器具有高精度、高稳定性和高可靠性的特点。[/color][/font][font=&][color=#333333][/color][/font][font=&][color=#333333][font=Segoe UI]涂鸦液位传感器功能实现,我们的超声波液位传感器是实时检测液位情况,可以通过手机实时查看液位情况,观测到三种液位状态,分别是正常、上限报警、下限报警,同时也可以设置液位报警提醒,[/font][font=Segoe UI]APP会发送通知提醒,操作简单。超声波液位传感器有效探测距离为10cm到250cm,需要开孔安装在水箱底部,手机上涂鸦APP液位会随着实际液位变化而变化,液位到达0.36m,出现上限报警提醒,当液位往下掉的时候就会恢复正常,上限与下限都由客户自由设置,可以满足客户随时随地查看液位情况的需求,只需手机一点便可查看液位情况[/font][/color][/font][align=center][img=涂鸦超声波液位传感器,690,690]https://ng1.17img.cn/bbsfiles/images/2023/07/202307111456069257_8172_4008598_3.jpg!w690x690.jpg[/img][/align][font=&][color=#333333]涂鸦超声波[url=https://www.eptsz.com]液位传感器[/url]具有多种优点。首先,它具有非接触式测量的特点,不需要直接接触液体,避免了传统测量方法中可能出现的污染和腐蚀问题。其次,传感器的测量范围广泛,可以适应不同液体的测量需求。此外,传感器的响应速度快,可以实时监测液位的变化。[/color][/font][font=&][color=#333333][/color][/font]

[font=&][color=#333333]涂鸦超声波液位传感器是一种先进的技术,用于检测液体的水位。它利用超声波技术来测量液体的高度,通过发射和接收超声波信号来实现。该传感器具有高精度、高稳定性和高可靠性。[/color][/font][font=&][color=#333333][/color][/font][font=&][color=#333333][font=Segoe UI]我们的超声波液位传感器可以实时检测液位情况,并通过手机实时查看。它可以观测到三种液位状态,包括正常、上限报警和下限报警,并且可以设置液位报警提醒。当液位达到上限时,手机[/font]APP会发送通知提醒,操作非常简单。传感器的有效探测距离为10cm到250cm,需要安装在水箱底部开孔处。手机上的涂鸦APP会根据实际液位变化而变化,当液位达到0.36m时,会出现上限报警提醒,当液位下降时,会恢复正常。上限和下限都可以由客户自由设置,以满足客户随时随地查看液位情况的需求,只需轻触手机即可查看液位情况。[/color][/font][font=&][color=#333333][/color][/font][align=center][/align][font=&][/font][align=center][color=#333333] [/color][img=涂鸦超声波液位传感器,690,690]https://ng1.17img.cn/bbsfiles/images/2023/07/202307171529553818_3460_4008598_3.jpg!w690x690.jpg[/img][/align][font=&][color=#333333]涂鸦[url=https://www.eptsz.com]超声波液位传感器[/url]具有多种优点。首先,它采用非接触式测量,无需直接接触液体,避免了传统测量方法可能出现的污染和腐蚀问题。其次,传感器的测量范围广泛,适用于不同液体的测量需求。此外,传感器响应速度快,可以实时监测液位的变化[/color][/font][b][font=&][color=#333333]。[/color][/font][font=&][color=#333333][/color][/font][/b]

超声波传感器是利用传感器头部的压振陶瓷的振动,产生高频(人耳听不见)声波来进行感应的,如果这声波碰到了某个物体反射回来,传感器就能接收到回波。传感器根据声波波长和发射及接收回波的时间差就能确定传感器探头与物体之间的距离。典型应用,一个传感器可以通过按钮的设定来拥有近距离和远距离两种设定,无论物体在那一种界限里,传感器都可以检测到。例如:超声波传感器可以安装在一个装液体的池子上,或者是一个装小球的箱子上,向这个容器发出声波,通过接收到返回波的时间长短就能确定这个容器是满的、空的或者是部分满的。[align=center] [img=,220,223]http://ng1.17img.cn/bbsfiles/images/2018/01/201801261602452124_3575_3345088_3.png!w220x223.jpg[/img][/align]超声波传感器还可以是对射式的,即独立的发射器和接收器。当检测缓慢移动的物体,或者需要快速响应或者在潮湿环境中应用时,这种对射式或者叫分体式的超声波传感器非常适用。在检测透明或有色物体、液体,检测光滑、粗糙、有光泽、半透明等材料的物体表面,和检测不规则物体时,超声波传感器都是首选。因此超声波传感器广泛应用在工业、国防、生物医学等方面。对于超声波传感器的使用规则上,很多客户往往忽略了一些环境因素的影响,而对正常使用超声波传感器造成困扰。工釆网小编特别为客户研究总结了如下几大因素:[b] [/b]1、范围和尺寸被检测的物体的尺寸大小会影响超声波传感器的最大有效范围,传感器必须探测到一定级别的声波才能被激励输出信号,一个较大的物体可以将大部分声波反射给传感器,所以传感器可以在它的最大限度内对此物体进行感应,而一个小物体只能反射很少的声波,这样就明显地减小了感应的范围。2、被测物能运用超声波传感器进行检测的最理想的物体应该是大型、平坦、高密度的物体,垂直放置面对着传感器感应面。最难检测的是那些面积非常小,或者是可以吸收声波的材料制作的,比如泡沫塑料,或者是角面对着传感器的。一些比较困难被检测的物体可以先对物体的背景表面进行示教,再对放在传感器和背景之间的物体作出反应。用于液体测量时需要要液体的表面垂直面对超声波传感器,如果液体的表面非常不平整,波动大,那么传感器的响应时间(St)要调的更长一些,它会将这些变化做个平均,可以尽量减小非常不平整,波动大因素对测量结果带来的影响。3、振动无论是传感器本身还是周围机械的振动,都会影响距离测量的精确度,这时可以考虑采取一些减震措施,例如:用橡胶的抗震设备给传感器做一个底座,可以减少振动,用固定杆也可以消除或者最大程度的减少振动。 衰减 当周围环境温度缓慢变化的时候,有温度补偿的超声波传感器可以做出调整,但是如果温度变化过快,传感器将无法做出调整。4、误判声波可能会被附近的一些物体反射,比如导轨或者固定夹具,为了确保检测的可靠性,必须减少或者排除周围物体对声波反射的影响,为了避免对周围物体的错误检测,许多超声波传感器都有一个LED指示器来引到操作人员进行安装,来确保这个传感器被正确的装好,减少出错的风险。超声波传感器发射人耳无法听见的高频声音脉冲,并测量信号发射到被物体发射回来的时间差。坚固的超声波传感器已经在各种场合成功地展示了其优越的性能,尤其是非接触物体测量或检测。这也可用于非常恶劣的工作环境。让人们印象最深刻的性能是可以准确检测各种材料和颜色的物质(不受材料和颜色影响)。超声波传感器的检测范围取决于其使用的波长和频率。波长越长,频率越小,检测距离越大,如具有毫米级波长的紧凑型传感器的检测范围为300~500mm波长大于5mm的传感器检测范围可达8m。一些传感器具有较窄的6ordm 声波发射角,因而更适合精确检测相对较小的物体。另一些声波发射角在12ordm 至15ordm 的传感器能够检测具有较大倾角的物体。此外,我们还有外置探头型的超声波传感器,相应的电子线路位于常规传感器外壳内。这种结构更适合检测安装空间有限的场合。
[align=center][/align]力传感器在大家的生活中是无处不在的,力传感器是一种相对比较耐用的机电类产品,在使用力传感器的时候需要注意保证它的测试精度,如果这个没办法把握的话那测量的结果就不准确了,也没有可参考的价值,那么在使用力传感器的时候这个精度要怎么去注意呢?力传感器周围应尽量设置一些“挡板”,甚至用薄金属板把力传感器罩起来。这样可防止杂物玷污力传感器及某些可动部分,而这种“沾污”往往会使可动部分运动不爽,而影响称量精度。系统有无运动不爽现象,可以用以下方法判别。即在秤台上加或减大约千分之一额定负荷看看显示仪是否有反映,有反映,说明可动部分未受“沾污”。力传感器所有通向显示电路或从电路引出的导线,均应采用屏蔽电缆。屏蔽线的联接及接地点应合理。若未通过机械框架接地,则在外接地,但屏蔽线互相联接后未接地,是浮空的。注意:有3只力传感器是全并联接法,力传感器本身是4线制,但在接线盒内换成6线制接法。力传感器输出信号读出电路不应和能产生强烈干扰的设可”控硅,接触器等)及有可观热量产生的设备放在同一箱体中,若不能保证这一点,则应考虑在它们之间设置障板隔离之,并在箱体内安置风扇。用以测量力传感器输出信号的电子线路,应尽可能配置独立的供电变压器,而不要和接触器等设备共用同一主电源。力传感器应采用铰合铜线(截面积约50mm2)形成电气旁路,以保护它们免受电焊电流或雷击造成的危害。力传感器使用中,必须避免强烈的热辐射,尤其是单侧的强烈热辐射。力传感器电气连接方面备(如力传感器的信号电缆,不和强电电源线或控制线并行布置(例如不要把力传感器信号线和强电电源线及控制线置于同一管道内)。若它们必须并行放置,那么,它们之间的距离应保持在50CM以上,并把信号线用金属管套起来。尽量采用有自动定位(复位)作用的结构配件,如球形轴承、关节轴承、定位紧固器等。他们可以防止某些横向力作用在力传感器上。要说明的是:有些横向力并不是机械安装引起的,如热膨胀引起的横向力,风力引起的横向力,及某些容器类衡器上的搅拌器的振动引起的横向力即不是机械安装引起的。某些衡器上有些必须接到秤体上的附件(如容器秤的输料管道等),我们应让他们在力传感器加载主轴的方向上尽量柔软一些,以防止他们“吃掉”传感器的真实负荷合而引起误差。要轻拿轻放尤其是由合金铝制作弹性体的小容量力传感器,任何冲击、跌落,对其计量性能均可能造成极大损害。对于大容量的测力传感器,一般来说,它具有较大的自重,故而要求在搬运、安装时,尽可能使用适当的起吊设备(如手拉葫芦、电动葫芦等)。安装传感器的底座安装面应平整、清洁,无任何油膜,胶膜等存在。安装底座本身应有足够的强度和刚性,一般要求高于力传感器本身的强度和刚度。测力传感器虽然有一定的过载能力,但在测力系统安装过程中,仍应防止力传感器的超载。要注意的是,即使是短时间的超载,也可能会造成力传感器永久损坏。在安装过程中,若确有必要,可先用一个和力传感器等高度的垫块代替力传感器,到最后,再把力传感器换上。在正常工作时,力传感器一般均应设置过载保护的机械结构件。若用螺杆固定力传感器,要求有一定的紧固力矩,而且螺杆应有一定的旋入螺纹深度。一般而言,固定螺杆因采用高强度螺杆。力传感器包含范围:[color=#333333]气体流量传感器丨微型压力传感器丨绝对压力变送器丨微量氧传感器丨[/color][color=#333333]数字温湿度[/color][color=#333333]传感器丨[url=http://mall.ofweek.com/category_54.html]力传感器[/url]丨煤气检测传感器丨气压感应器丨一氧化碳传感器丨h2传感器丨压阻式压力变送器丨硫化氢传感器丨co2气体传感器丨光离子传感器丨ph3传感器丨百分氧传感器丨bm传感器[/color][color=#333333]丨[/color][color=#333333]风速传感器丨voc传感器丨[/color][color=#333333]光纤应变传感器[/color][color=#333333]丨位置传感器丨[/color][color=#333333]meas压力[/color][color=#333333]传感器丨[/color][color=#333333]称重传感[/color][color=#333333]器丨甲烷传感器丨微流量传感器丨光纤应变传感器丨称重传感器丨三合一传感器丨sst传感器丨gss传感器丨ch4传感器丨氟利昂传感器丨硫化物传感器丨o3传感器丨双气传感器丨压电薄膜传感器丨一氧化氮传感器丨透明度传感器丨二氧化硫传感器丨氰化氢传感器丨煤气检测传感器丨燃气检测传感器丨电流氧传感器[/color]

[font='Segoe UI',sans-serif][color=#1E1F24] [/color][/font][font=宋体][color=#1E1F24]如今随着科学技术的不断发展,液位传感器也得到了广泛应用,那么不接触液体就能检测的液位传感器有哪些呢,今天升泽传感科技就带大家了解一下。[/color][/font][font=宋体][color=#1E1F24]光电分离式液位传感器可以实现不接触液体就能检测液位变化的功能,它是在传统结构上将棱镜与电子元件部分分离,将棱镜部位设计到用户水箱上,从而可以实现水箱需要移动加水的问题,同时也避免了边角细菌滋生。[/color][/font][font=宋体][color=#1E1F24]电容式液位传感器[/color][/font][font=宋体]通过感应有水和空气状态时的电容值差异判断水箱内部是否缺水,只需紧贴在绝缘水箱外壁使用,适合塑料、玻璃等容器,使用时要在常温下使用,保持传感器表面干燥,探头周边两厘米需要避开金属或磁场,防止造成干扰。[/font][align=center][img=非接触式液位传感器,598,300]https://ng1.17img.cn/bbsfiles/images/2023/10/202310301625060483_576_4008598_3.jpg!w598x300.jpg[/img][/align][font=宋体]超声波液位传感器也是非接触式,检测距[/font] 10cm-250cm [font=宋体],[/font] [font=宋体]连续实时检测,[/font][font=宋体][color=#1E1F24]超声波传感器所具有的高灵敏度和穿透力,使其更易用于从外部检测深层物体。与依赖光源或照相机的接近传感器不同,声波传感器在没有光亮的黑暗环境中国也能稳定可靠地检测。超声波传感器在测量传感器与平行表面的距离精度较高。[/color][/font][font=宋体][color=#1E1F24]在选择[url=https://www.eptsz.com]非接触式液位传感器[/url]时,根据实际应用环境选择合适的液位传感器,升泽传感科技是一家专门从事液位传感器的厂家,专注液位传感器、流量传感器、防跌倒传感器、红外接近传感器等产品专业生产加工的公司。[/color][/font]
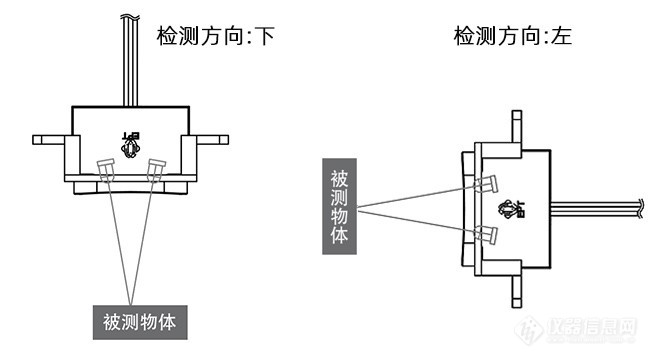
[align=left]超声波传感器是一种机械波,其振动频率高于声波。它是在电压激励下由换能器晶片的振动产生的。当超声波撞击杂质或界面时,它将产生显着的反射以形成回波的反射,当其撞击移动物体时可产生多普勒效应。因此,超声检测广泛应用于工业、防御、生物医学等方面。超声波传感器是利用超声波的特性开发的传感器。在工业中,超声波的典型应用是金属的无损检测和超声波厚度测量。超声波传感器的医学应用主要是诊断疾病,已成为临床医学中不可或缺的诊断方法。[/align]超声波传感器根据待检测物体的体积、材料、以及是否可移动而具有不同的检测方法。常见的检测方法如下:P超声波传感器发射器和接收器分别位于两侧,当待检测物体在它们之间通过时,根据超声波的衰减(或遮挡)检测。有限距离类型:发射器和接收器位于同一侧,当检测到的物体通过规定的距离时,根据反射检测超声波。适用范围:发射器和接收器位于限制范围的中心,反射器位于限制范围的边缘,当没有待检测物体时,反射波衰减值用作参考值。当要检测的对象在有限范围内通过时,基于反射波的衰减来检测(将衰减值与参考值进行比较)。回归反射型:发射器和接收器位于同一侧,检测对象(平面物体)用作反射表面,并根据反射波的衰减进行检测。超声波传感器检测的好坏用万用表直接测试P + F超声波传感器没有任何反映。为了测试超声波传感器的质量,可以使用音频振荡电路。当C1为390μF时,可在逆变器的第8和第10引脚之间产生约1.9kHz的音频信号。将要检测的超声波传感器(发射和接收)连接在8到10英尺之间 如果超声波传感器可以发出声音,那么超声波传感器基本上是好的。由超声波探头发射的超声波脉冲信号在气体中传播,并被空气和液体之间的界面反射。在接收到回波信号之后,计算超声波往返的传播时间,并且可以转换距离或距离水平高度。 超声波传感器包含范围:[color=#333333]气体流量传感器丨绝对压力变送器丨微量氧传感器丨ph传感器丨水管温度传感器丨气压感应器丨微型压力传感器丨[/color][color=#333333]数字温湿度[/color][color=#333333]传感器丨煤气检测传感器丨h2传感器丨压阻式压力变送器丨[/color]微型传感器[color=#333333]丨一氧化碳传感器丨风速传感器丨硫化氢传感器丨光离子传感器丨ph3传感器丨[/color][color=#333333]电化学传感器丨[/color][color=#333333]光纤传感器丨超声波液位传感器[/color][color=#333333]丨[/color][color=#333333]二[/color][color=#333333]氧化碳传感器丨百分氧传感器丨[/color][color=#333333]co2气体传感器丨[/color][color=#333333]气压传感器丨bm传感器丨氧气传感器丨超声波风速传感器丨气压传感器丨电流传感器丨voc传感器丨风速传感器丨电流传感器[/color][color=#333333]丨[/color][color=#333333]光纤应变传感器丨流量传感器[/color][color=#333333]丨超声波传感器https://mall.ofweek.com/2133.html丨[/color][color=#333333]称重传感[/color][color=#333333]器[/color][color=#333333]丨压力传感器丨meas压力[/color][color=#333333]传感器丨位置传感器丨甲烷传感器丨微流量传感器丨光纤应变传感器丨一氧化氮传感器丨称重传感器丨三合一传感器丨sst传感器丨gss传感器丨压电薄膜传感器丨ch4传感器丨氟利昂传感器丨硫化物传感器丨o3传感器丨双气传感器丨透明度传感器丨二氧化硫传感器丨氰化氢传感器丨煤气检测传感器丨燃气检测传感器丨电流氧传感器[/color]
(1)信息的显示与报警 电子信息中心可以监控发动机的工况及其他信息,当出现不正常情况时,可随时报警。报警系统传感器有机油压力传感器、液量传感器、温度传感器等,这些传感器向电脑提供信息,必要时启动报警电路进行报警。 (2)语音提示 语音提示包括语音警告和语音控制。语音警告通过开关型传感器监测车内部件的工作情况,一旦出现故障,开关闭合,控制器被触发,语音电路被启动,同时发出报警声音讯号。 语音控制是指驾驶员可用声音指挥、控制汽车的某个部件的工作,进行指令性动作。 (3)车辆定位和导航 车辆定位和导航技术已经应用在汽车上,它将全球定位系统(GPS)接收机安装在车辆上,并使用推算技术,即利用各种传感器,如相对传感器、绝对传感器、转向角传感器、车轮转速传感器(测距)、地磁传感器、陀螺盘(测方向)、罗盘等精确测定汽车目前所在的位置。 使用车辆定位和导航系统,可以完成下列各项任务: ①数字地图显示; ②利用城市街区地址、各交叉路口确定要到达的目的地; ③计算行驶路径; ④沿着预先计算出的行驶路线为驾驶员导航; ⑤各种传感器检测到的车辆行驶轨迹和已知道路网进行匹配,以便更准确地确定车辆的实际位置; ⑥为驾驶员提供旅游信息,如旅游指南、路标、旅馆和饭店等信息。

光电传感器是采用光电元件作为检测元件的传感器,它首先把被测量的变化转换成光信号的变化,然后借助光电元件进一步将光信号转换成电信号。光电传感器一般由处理光学通路和光电处理元件2 部分组成。其基本原理是以光电效应为基础,把被测量的变化转换成光信号的变化,然后借助光电元件进一步将非电信号转换成电信号。光电效应是指用光照射某一物体,可以看作是一连串带有一定能量为的光子轰击在这个物体上,此时光子能量就传递给电子,并且是一个光子的全部能量一次性地被一个电子所吸收,电子得到光子传递的能量后其状态就会发生变化,从而使受光照射的物体产生相应的电效应。[img=,503,330]http://ng1.17img.cn/bbsfiles/images/2017/11/201711271556_01_3332482_3.jpg!w503x330.jpg[/img]光电传感器的性能优点如下:1、[color=#333333]检测距离长。在对射型中保留[/color][color=#333333]10m[/color][color=#333333]以上的检测距离等,便能实现其他检测手段。[/color]2、[color=#333333]对检测物体的限制少。[/color][color=#333333]由于以检测物体引起的遮光和反射为检测原[/color][color=#333333]理,所以不象接近传感器等将检测物体限定在金属,它可对玻璃[/color][color=#333333].[/color][color=#333333]塑料[/color][color=#333333].[/color][color=#333333]木材[/color][color=#333333].[/color][color=#333333]液体等几乎所有物体进行检测。[/color]3、[color=#333333]响应时间短。光本身为高速,并且传感器的电路都由电子零件构成,所以不包含机械性工作时间。[/color]4、[color=#333333]分辨率高。能通过高级设计技术使投光光束集[/color][color=#333333]中在小光点,或通过构成特殊的受光光学系统,来实现高分辨率。也可进行微小物体的检测和高精度的位置检测。[/color]5、[color=#333333]可实现非接触的检测。可以无须机械性地接触[/color][color=#333333]检测物体实现检测,因此不会对检测物体和传感器造成损伤。因此,传感器能长期使用。[/color]6、[color=#333333]可实现颜色判别。通过检测物体形成的光的反[/color][color=#333333]射率和吸收率根据被投光的光线波长和检测物体的颜色组合而有所差异。利用这种性质,可对检测物体的颜色进行检测。[/color]7、[color=#333333]便于调整。在投射可视光的类型中,投光光束[/color][color=#333333]是眼睛可见的,便于对检测物体的位置进行调整。[/color]光电传感器应用领域如下:一、条形码扫描笔当扫描笔头在条形码上移动时,若遇到黑色线条,发光二极管的光线将被黑线吸收,光敏三极管接收不到反射光,呈高阻抗,处于截止状态。当遇到白色间隔时,发光二极管所发出的光线,被反射到光敏三极管的基极,光敏三极管产生光电流而导通。整个条形码被扫描过之后,光敏三极管将条形码变形一个个电脉冲信号,该信号经放大、整形后便形成脉冲列,再经计算机处理,完成对条形码信息的识别。二、烟尘浊度监测仪防止工业烟尘污染是环保的重要任务之一。为了消除工业烟尘污染,首先要知道烟尘排放量,因此必须对烟尘源进行监测、自动显示和超标报警。烟道里的烟尘浊度是用通过光在烟道里传输过程中的变化大小来检测的。如果烟道浊度增加,光源发出的光被烟尘颗粒的吸收和折射增加,到达光检测器的光减少,因而光检测器输出信号的强弱便可反映烟道浊度的变化。三、光电式烟雾报警器没有烟雾时,发光二极管发出的光线直线传播,光电三极管没有接收信号。没有输出,有烟雾时,发光二极管发出的光线被烟雾颗粒折射,使三极管接受到光线,有信号输出,发出报警。四、测量转速在电动机的旋转轴上涂上黑白两种颜色,转动时,反射光与不反射光交替出现,光电传感器相应地间断接收光的反射信号,并输出间断的电信号,再经放大器及整形电路放大整形输出方波信号,最后由电子数字显示器输出电机的转速。最后工采网小编给大家介绍两款最先进、也是热销的光电传感器型号,是从美国进口过来的顶尖级光电传感器,质量和性能方面绝对的优质。美国Rain Wise 光电传感器 -ms-802,ms-802f :[img=,289,292]http://ng1.17img.cn/bbsfiles/images/2017/11/201711271556_02_3332482_3.jpg!w289x292.jpg[/img]ms-802标准pyran度计是测量全球太阳能的终极参考传感器,具有最高精度的辐照度,它坚固的黄铜机械结构使它成为一个耐用的传感器,适合在恶劣的环境中使用,ms-802被用作PV研究和气候研究的标准,ogy在世界各地的研究,与太阳跟踪器(str系列)或手动着色环(rsr-01)相结合,分别是全局的正常的入射(GNI)和漫射(DHI)的辐照度可以测量。ms-802f是ms-802综合呼吸机机组,以改善各种环境条件下的性能(防止或减少露水、雨、雪、冰和灰尘的影响)。Rain Wise 光电传感器ms-802和ms-802f特征:1、二级标准日射强度计2、快速响应时间(95%小于5S)3、温度补偿4、宽温度范围5、高品质光学玻璃圆屋顶6、适当的余弦响应7、ms-802f是ms-802,有110真空吸尘器/ 12 VDC通风系统8、防止任何可能的影响,霜,雪和尘土Rain Wise 光电传感器ms-802和ms-802f参数:[img=,690,367]http://ng1.17img.cn/bbsfiles/images/2017/11/201711271556_03_3332482_3.jpg!w690x367.jpg[/img]美国RainWise 光电传感器硅传感器 -ML-01:[img=,299,300]http://ng1.17img.cn/bbsfiles/images/2017/11/201711271557_01_3332482_3.jpg!w299x300.jpg[/img]ML-01型硅传感器是参考单元和宽带热电比热计的链接。与参考传感器相比,它有适当的余弦值,而且相对紧凑,但有好处与光伏组件(响应时间、光谱和温度响应)相同。ML-01是一种工业级太阳能传感器,专门用于性能比测量作为气象、农业和环境研究的辐照度测量应用。传感器体的紧凑尺寸使它易于集成在任何应用程序中使用它或者没有安装板。对于全球水平测量应用,传感器可以安装水平位置与标准可拆卸安装板与精神水平和水平脚。具有防紫外线扩散的单硅探测器在低太阳高程时也给出了余弦响应角度。由于圆锥的作用,使其在扩散面上的淤积或水沉积作用最小几何形状。ml - 01根据适用于PV的国际校准方法进行校准参考细胞(25°C/ AM1.5G 1000 w / m2 AAA太阳能模拟器(IEC 60904 - 3)。所有EKO贸易辐射传感器可追溯至世界辐射参考(WRR)。该传感器的低输出电压可以很容易地转换成4 - 20ma电流或更高的电压MS-4 . .20 ma转换器。mV/ mA转换器可以在程序中预先编程和优化操作范围与通用测量设备兼容。Rain Wise 光电传感器硅传感器ML-01特征:1、快速响应时间(10ms)2、CIE适应光的反应3、玻璃穹顶加上劝阻光学4、低温度依赖性Rain Wise 光电传感器硅传感器ML-01参数:[img=,627,415]http://ng1.17img.cn/bbsfiles/images/2017/11/201711271557_02_3332482_3.jpg!w627x415.jpg[/img]
您好我公司研发生产激光[img]file:///C:\Users\27312\AppData\Local\Temp\_(WQ$SC}IL9IB$KV$RNX53L.png[/img]测距避障传感器的,应用范围无人飞机定高避障,AGV搬运机器人测距避障导航,扫地机器人测距避障导航,电子围栏测距报警,汽车测距报警防撞等领域。我司是属于研发生产型企业。研发团队实力雄厚,如需进一步了解请致电黄经理:微信同号18689274020;QQ2366396868 我们将竭诚为您服务!!!

[align=left]超声波是一种振动频率高于声波的机械波。它是在电压激励下由换能器透镜的振动产生的。它的高频率为、,短波长为、。衍射现象很小,特别是方向性好。、可以是射线和方向的。沟通等特点。液体固体的超声波渗透性很强,特别是在太阳光的不透明固体重量下,其可以穿透超过十米的深度。[/align]当超声波撞击杂质或界面时,它将产生显着的反射以形成回波的反射,当它撞击移动物体时可产生Domiller效应。这种超声波检测广泛应用于工业、防御、生物医学等方面。超声波传感器广泛用于现代工业领域。超声波传感器使用不同的检测方法。有四种常见的检测方法:1、透射:发射器和接收器分别位于两侧。当待测物体在它们之间通过时,根据超声波的衰减(或遮挡)检测。2、有限距离类型:发射器和接收器位于同一侧。当检测到的物体在限定的距离内通过时,根据反射的超声波检测物体。3、范围:发射器和接收器位于有限范围的中心,反射器位于有限范围的边缘,当没有待检测物体时的反射波衰减值用作参考值。当要检测的对象在有限范围内通过时,基于反射波的衰减来检测(将衰减值与参考值进行比较)。4、逆向反射:发射器和接收器位于同一侧,检测对象(平面物体)用作反射面,检测基于反射波的衰减。OFweek Mall技术工程师推荐使用以下几种超声波传感器:[b]MaxBotix 超声波传感器 人体检测传感器-MB1004[/b] 特点近端探测低成本的邻近目标检测方案测量周期快超低功耗适合电池供电系统可以自由运行测量或者外部触发测量宽供电电压2.5V~5.5V可输出高低电平报警信号[img=,262,231]https://ng1.17img.cn/bbsfiles/images/2018/11/201811091145153734_4623_3422752_3.png!w262x231.jpg[/img]超声波传感器可用于灰尘、雾、或蒸汽。它非常适合非接触式位置和距离测量。可以在不考虑颜色或形状的情况下以毫米精度检测不同材料的物体。超声波传感器使用超出人类可听声音的高频超声波作为测量介质。超声波传感器在工业中的三种常见应用主要体现在以下方面:1、超声波可应用于食品加工厂,实现塑料包装检测的闭环控制系统。采用新技术,它可以在湿环中进行测试,如洗瓶机、噪声环境、极端温度变化环境。2、用于医学检测的超声波传感器—— B超检查。3、超声波传感器质量检测——超声波探伤仪,超声波探伤仪主要用于金属部件内部的质量检测,如检测金属气泡,焊接部位未焊接等缺陷。超声波传感器https://mall.ofweek.com/2133.html丨超声波液位传感器丨无人机超声波传感器丨超声波风速传感器超声波水位传感器

[align=center][b]紫外线传感器对高压电网电晕放电的监测[/b][/align]高压输变电系统的绝缘子的性能下降时,会产生电晕放电,同时会发出紫外线,早期造成电能损耗和绝缘子性能的持续恶化,长期影响高压输变电系统的安全性,需要进行实时检测。目前针对输电线路上的电晕放电检测主要有:人工巡查检测、脉冲电流检测、红外检测、超声电晕检测和紫外检测等方法。由于电晕放电的目标小、信号弱,而且许多输电线路架设在自然条件比较差的户外时,人工巡查检测不但费时费力,而且检测效果也不好;脉冲电流检测不太适合超高电压检测,而且仪器体积较大;红外检测受日光影响大,误检率高且响应速度慢,红外能检出时,往往线路已发热,属于后期检测,不能适应现在输变电的要求;超声电晕检测在户外也很难达到理想的效果。高压电网电晕放电监测比较有效的是紫外线监测。现有的紫外检测设备主要是紫外光电管以及半导体式紫外线探测器,紫外光电的代表性产品是R2868,但是该产品在检测到UVC波段的紫外线时,光电管呈现的状态是开或者断,不能够实时的反映出电晕的强度大小。现阶段半导体式的紫外线探测器主要是工采网从德国Sglux公司进口的紫外线传感器、UV传感器- UV-Arc。一般的紫外线传感器在探测微弱的紫外线时,产生的电流都会很低,故要求传感器必须采用的是基于SiC材质的低暗电流传感器,在经过高倍放大后,暗电流对输出值影响才会降到最低。同时由于放大倍数比加大,传感器材质一般不会完全对UVA和UVB波段的紫外线不敏感,太阳光中的A和B波段的紫外线相对于电晕中的C波段紫外线是不可忽视的。在高放大倍速的电路中,在太阳光下A和B波段造成的误差会完全覆盖C波段,故传感器在使用过程中必须添加滤光片。德国Sglux的UV-Arc探测器自带抑制太阳光中A和B波段的滤光镜,其金属外壳具有很高的电磁兼容性。传感器本体完全防水,主要是用于受电弓电弧监测中,高压电线电弧监测,监测距离需要根据电弧强度决定。传感器光谱响应曲线如下:[img=,490,392]https://ng1.17img.cn/bbsfiles/images/2018/09/201809261757020262_6016_3345709_3.jpg!w490x392.jpg[/img]传感器特性:传感器型号输出可选4-20mA或者0-5V,标准线长2m。选择0-5V输出时供电电压选择范围为7-24V,选择4-20mA时,供电电压只能24V。[url=http://www.861718.com][b][color=#ff0000]了解更多请看仪商网[/color][/b][/url]
超声波并不是测量机器人与物体间距离的唯一方法,也可以利用红外线。和超声波测量不同,红外线距离传感器不会去探测线光束的传播时间。因为对于我们感兴趣的距离,传输时间为10—15—10-12秒数量级。只有那些极为昂贵的电路才能应付这样的速度。红外线系统采用所谓视差技术。即测量已知光源和它的反射光束之间的反射角。它的工作方式是:红外线光束照射在一个场景上。光束经过传感器前的物体反射后。再照射到传感器。物体越接近,由于视差引起的角度变化就越大。反射光束照在一个非常小的线性光检测器矩阵上。光检测器矩阵连接分析物体距离的电路。这个电路可以提供数字或模拟输出。







 我要推广仪器
我要推广仪器
 下载APP
下载APP