推荐厂家
暂无
暂无
 留言咨询
留言咨询
留言咨询
留言咨询
留言咨询
留言咨询

 400-860-5168转4470
留言咨询
400-860-5168转4470
留言咨询
 400-860-5168转4019
留言咨询
400-860-5168转4019
留言咨询
 400-860-5168转4470
留言咨询
400-860-5168转4470
留言咨询




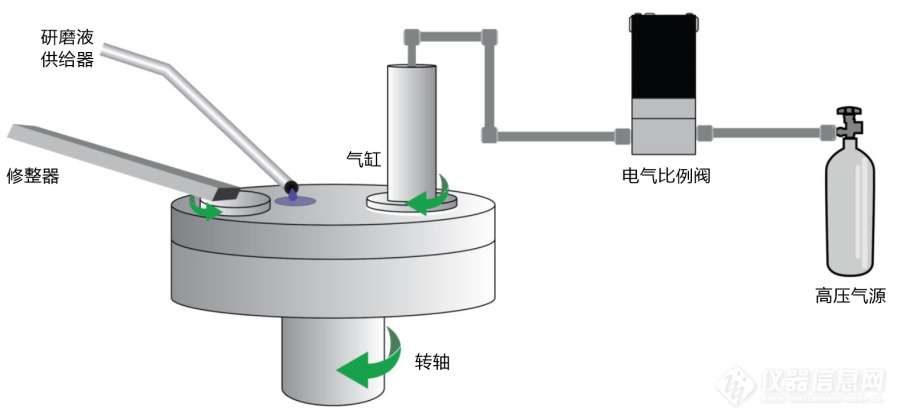
[color=#990000]摘要:为大幅度提高现有CMP工艺设备中压力控制的稳定性,在现有电气比例阀这种单回路PID压力调节技术的基础上,本文提出了升级改造方案,即采用串级控制法(双回路PID控制,也称级联控制),通过在现有电气比例阀回路中增加更高精度的压力传感器和PID控制器,可以将研磨抛光压力的稳定性提高一个数量级,从1~2%的稳定性提升到0.1~0.2%。[/color][align=center]~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~[/align] [size=18px][color=#990000][b]一、问题的提出[/b][/color][/size]在半导体制造过程中,化学机械抛光(CMP)是在半导体晶片上产生光滑、平坦表面的关键工艺。CMP工艺中的压力控制是决定最终产品质量的关键因素。如果压力过高,会损坏半导体材料;如果压力太低,会导致表面不平整。CMP系统中需要配置专用的压力调节装置,以确保压力保持在安全范围内。通过将压力保持在安全范围内,压力调节装置有助于确保半导体晶片在CMP过程中不被损坏。目前的CMP系统中普遍采用电气比例阀作为压力调节器,其典型结构如图1所示。在CMP中采用比例阀来控制抛光过程中施加在晶圆上的压力。由于比例阀是电子控制和压力值的模拟信号输出,因此可以通过控制系统(如PLC)对其进行动态编程和压力监控,这意味可以根据被抛光的特定晶片准确改变施加的压力。此外,由于电气比例阀作为压力调节器是一个闭环控制,即使在下游压力发生变化期间,施加在抛光垫上的压力也会保持不变,由此实现压力的自动调节。[align=center][img=常规研磨机电气比例阀压力控制系统结构,600,280]https://ng1.17img.cn/bbsfiles/images/2022/09/202209150917534790_1434_3221506_3.png!w690x322.jpg[/img][/align][align=center]图1 常规CMP系统中电气比例阀压力控制装置结构示意图[/align]在一些CMP工艺的实际应用中,要求抛光压力具有很高的稳定性,图1所示的常规压力调节装置则无法满足使用要求,这主要体现在以下几方面的不足:(1)电气比例阀的整体控制精度明显不足,其整体精度(包含线性度、迟滞和重复性)往往在1~2%范围内。这种精度水平主要受集成在比例阀内的压力传感器、高速电磁阀和PID控制器性能和体积等因素制约,而且进一步提高的空间非常有限。(2)电气比例阀安装位置与气缸有一定的距离,由此造成比例阀所检测到的压力值并不是气缸的真实压力,而且比例阀处压力与气缸压力之间有一定的时间滞后。为解决上述存在的问题,进一步提高现有CMP工艺设备中压力控制的稳定性,在现有电气比例阀这种单回路PID压力调节技术的基础上,本文将提出升级改造方案,即采用串级控制法(双回路PID控制,也称级联控制),通过在电气比例阀回路中增加更高精度的压力传感器和PID控制器,可以将研磨抛光压力的稳定性提高一个数量级,从1~2%的稳定性提升到0.1~0.2%。[size=18px][color=#990000][b]二、CMP设备压力控制的串级PID控制方案[/b][/color][/size]在传统的CMP设备压力调节过程中,采用电气比例阀进行压力调节的稳定性完全受集成在比例阀内的压力传感器、高速电磁阀和PID控制器性能和体积等因素制约。为了提高压力控制的稳定性,并充分发挥电气比例阀的自身优势,我们采用了一种串级控制技术,即在作为第一回路的电气比例阀中增加第二控制回路,其中第二控制回路由更高精度的压力传感器和PID控制器构成。串级PID控制方案的整体结构如图2所示。[align=center][img=03.超高精密研磨机电气比例阀压力串级控制系统结构,600,333]https://ng1.17img.cn/bbsfiles/images/2022/09/202209150918245058_1534_3221506_3.png!w690x384.jpg[/img][/align][align=center]图2 串级控制法CMP系统压力控制装置结构示意图[/align]在图2所示的串级控制法压力调节装置中,安装了一个外置压力传感器用于直接监测气缸内的气压,压力传感器检测到的气缸压力信号传输给外置的PID控制器,外置PID控制器根据设定值或设定程序将控制信号传送给电气比例阀,比例阀根据此控制信号再经其内部PID控制器来调节高速电磁阀的动作,使得电气比例阀输出到气缸的气体气压与设定值始终保持一致。从上述串级控制过程可以看出,串级控制是一个双控制回路,是两个独立的PID控制回路,电气比例阀起到的是一个执行器的作用。串级控制法(也称级联控制法)是一种有效提升控制精度的传统方法,但在具体实施过程中,需要满足的条件是:[color=#990000]第二回路的传感器和PID控制器(这里是外置压力传感器和PID控制器)精度一般要比第一回路的传感器(这里是电气比例阀内置的压力传感器和PID控制器)要高。[/color]为了实现更高稳定性的CMP系统压力控制,我们推荐的实施方案是采用0.05%精度的外置压力传感器和超高精度PID控制器(技术指标为24位ADC、16位DAC和双浮点运算的0.01%最小输出百分比)。此实施方案我们已经进行过大量考核试验,压力稳定性可以轻松达到0.1%。[align=center]~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~[/align]
温度传感器的标定和大多数其它传感器的标定一样,最普遍的方法就是将传感器放置在一个可精确测定的、已知温度的环境中一段时间,然后记录检查传感器的输出是否与已知的环境温度一致,并计算出传感器的误差。那么接下来我们具体的看看温度变送器的标定方法吧。 由于自然环境下温度始终是一个缓变的物理量,所以一般情况下对温度传感器的检定是属于静态的,这也能满足绝大部分温度传感器的实际需要。动态的检定极少,能实现温度动态检测的设备也极少。 由于静态温度传感器检定的方法和原理极其简单,所以这类资料或标准反而少见。对温度传感器动态标定一般都是采用激光的方法。改善温度传感器的动态特性最好的方法就是选用反应敏感的感温材料和减少传感器感温部分的质量,降低其热惯性。 温度传感器的标定过程实际上也是确定温度传感器的各参数指标,尤其是精度问题,所以这个过程所用测量设备的精度通常要比待标定传感器的精度高一个数量级,这样通过标定确定购温度传感器性能指标才是可靠的,所确定的精度才是可信的。
制冰机是一种将水通过蒸发器由制冷系统冷却后生成冰的制冷机仪器。雪花制冰机的温度传感器有三个,分别设置在搅冰机构上、冷凝器上、冰桶上。 搅冰机构上的温度传感器是用来感受温度是否比较低,甚至是传动机构阻力太大,也就是说当温度比较低时,水流受阻,搅冰机构需要的扭矩变大,电机输入电流猛增,这时候需要冲冰,打开电磁阀,让压缩机的冷媒直接进入搅冰机构,而不是经过冷凝器后再进入搅冰机构,这样的一些列工作的完成是由温度传感器来检测和控制系统进行的。 在冷凝器上的温度传感器是这样工作的,当冷凝器上的温度过高时,风扇电机产生的冷却效果来不及冷却,这时候温度传感器感受到的温度过高,通过A/D转换,把模拟信号转换成数字信号,通过程序进行判断,发出指令,控制压缩机电机的继电器是否做出相应,最终控制着压缩机的工作状态。 冰桶上的温度传感器的作用是控制着冰块是否达到一定的高度,当冰块达到一定的高度后,感温传感器感受到,温度比较低时,一般设置的温度为7度,也是通过A/D模块进行模数转换,通过程序判断,作出相应的指令,指令发出,控制着整个系统的通断判断,最终控制着系统的运行与否。










 我要推广仪器
我要推广仪器
 下载APP
下载APP