皮米精度激光干涉仪如何在众多前沿领域中大显神通?
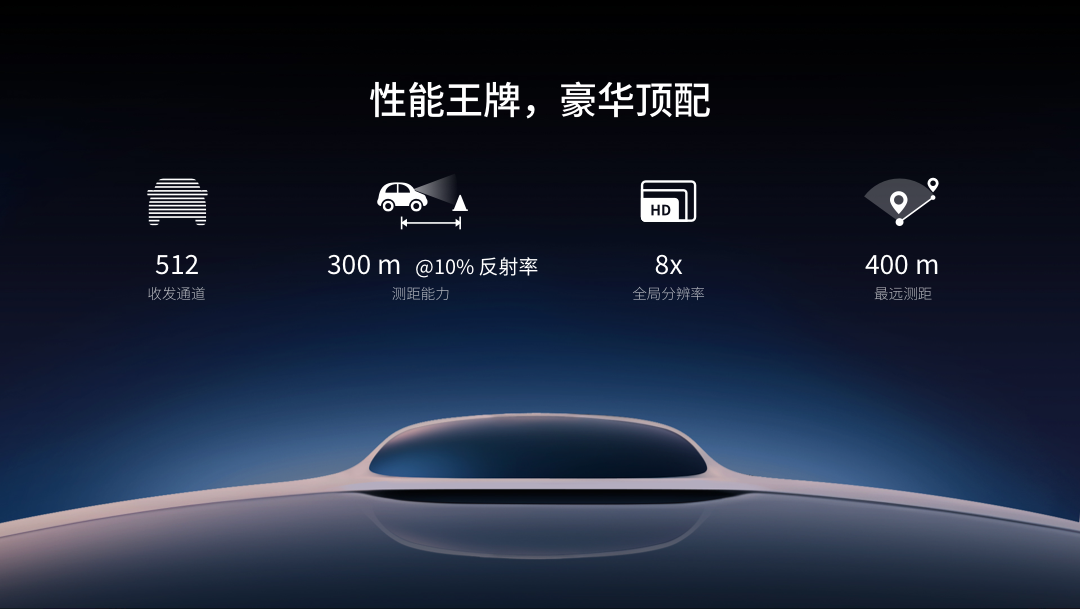
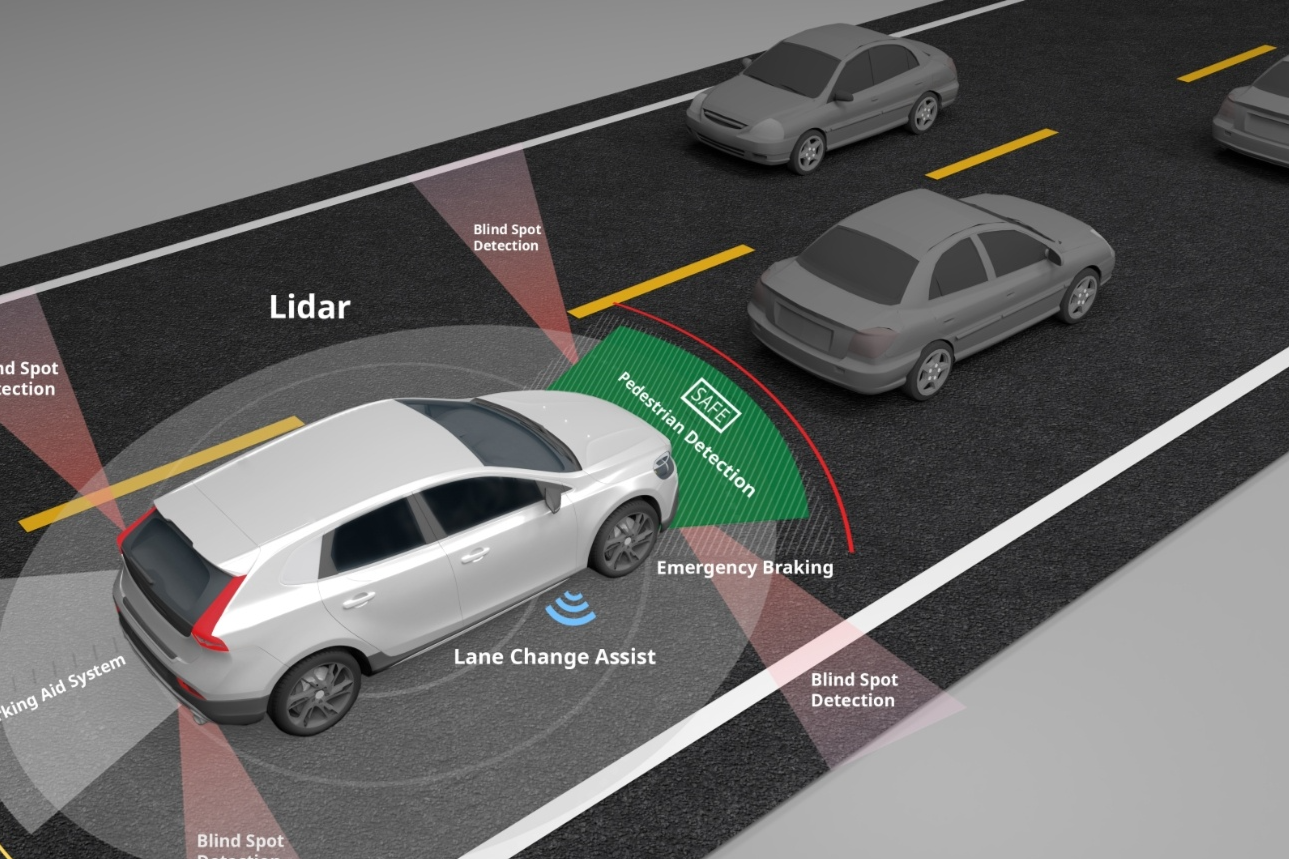
1.IDS3010激光干涉仪在自动驾驶高分辨调频连续波(FMCW)雷达中的应用自动驾驶是目前汽车工业为前沿和火热的研究,其中可靠和高分辨率的距离测量雷达的开发是尤为重要的。德国弗劳恩霍夫高频物理和雷达技术研究所(Wachtberg,D)Nils Pohl教授和波鸿鲁尔大学(Bochum,D)的研究小组提出了一种全集成硅锗基调频连续波雷达传感器(FMCW),工作频率为224 GHz,调谐频率为52 GHz。通过使用德国attocube公司的皮米精度激光干涉仪FPS1010(新版本为IDS3010),该雷达测量系统在-3.9 um至+2.8 um之间实现了-0.5-0.4 um的超高精度。这种新型的高精度雷达传感器将会应用于许多全新的汽车自动驾驶领域。更多信息请了解:S. Thomas, et al IEEE Transactions on Microwave Theory and Techniques 67, 11, (2019)图1.1 紧凑型FMCW传感器的照片图1.2 雷达测距示意图,左边为雷达,右边为移目标,attocube激光干涉仪用来标定测量结果 2. IDS3010激光干涉仪在半导体晶圆加工无轴承转台形变测量上的应用半导体光刻系统中的晶圆轻量化移动结构的变形阻碍了高通吐量的半导体制造过程。为了补偿这些变形,需要的测量由光压产生的形变。来自理工大学荷兰Eindhoven University of Technology 的科学家设计了一种基于德国attocube干涉仪IDS3010的测量结构,以此来详细地研究由光压导致的形变特性。图2.1所示为测量装置示意图,测量装置是由5 x 5 共计25个M12/F40激光探头组成的网格,用于监测纳米的无轴承平面电机内部的移动器变形。实验目的是通过对无轴承平面的力分布进行适当的补偿,从而有效控制转台的变形。实验测得大形变量为544 nm,小形变量为110 nm(如图2.2所示)。更多信息请了解:Measuring the Deformation of a Magnetically Levitated Plate displacement sensor图2.1 左侧为5X5排列探头测量装置示意图,右图为实物图图2.2 无轴承磁悬浮机台形变量的测量结果,大形变量为544 nm 3.IDS3010在提高X射线成像分辨率中的应用在硬X射线成像中,每个探针平均扫描时间的减少对于由束流造成的损伤是至关重要的。同时,系统的振动或漂移会严重影响系统的实时分辨率。而在结晶学等光学实验中,扫描时间主要取决于装置的稳定性。attocube公司的皮米精度干涉仪FPS3010(升后的型号为IDS3010),被用于测量及优化由多层波带片(MZP)和基于MZP的压电样品扫描仪组成的实验装置的稳定性。实验是在德国DESY Photon Science中心佩特拉III期同步加速器的P10光束线站上进行的。attocube公司的激光干涉仪PFS3010用来检测样品校准电机引起的振动和冲击产生的串扰。基于这些测量,装置的成像分辨率被提高到了±10 nm。更多信息请了解:Markus Osterhoff, et at. Proceedings Volume 10389, X-Ray Nanoimaging: Instruments and Methods III 103890T (2017)图3.1 实验得到的系统分辨率结果 4.IDS3010激光干涉仪在微小振动分析中的应用电荷化理论能够描述中性玻色子系统的布洛赫能带,它预言二维量子化的四缘体具有带隙、拓扑的一维边缘模式。全球研究机构苏黎世邦理工大学的Sebastian Huber教授课题组巧妙地利用一种机械超材料结构来模拟二维的拓扑缘体,次在实验上观测到了声子四拓扑缘体。这一具有重要意义的结果时间被刊登在Nature上(doi:10.1038/nature25156)。研究人员通过测试一种机械超材料的体、边缘和拐角的物理属性,发现了理论预言的带隙边缘和隙内拐角态。这为实验实现高维度的拓扑超材料奠定了重要基石。德国attocube公司的激光干涉仪IDS3010被用于超声-空气转换器激励后的机械超材料振动分析。IDS3010能到探测到机械超材料不同位置的微小振动,以识别共振频率。终实现了11.2 pm的系统误差,为声子四拓扑缘体的实验分析提供了有力的支持。更多信息请了解:Marc Serra-Garcia, et al. Nature volume 555, pages 342–345 (2018)图4.1 实验中对对机械超材料微小振动的频率分析5. IDS3010激光干涉仪在快速机床校准中的应用德国亚琛工业大学(Rwth Aachen University,被誉为“欧洲的麻省理工”)机床与生产工程实验室(WZL)生产计量与质量管理主任的研究人员利用IDS3010让机床自动校准成为可能,这又将大的提高机床的加工精度和加工效率。研究人员通过将IDS3010皮米精度激光干涉仪和其他传感器集成到机床中,实现对机床的自动在线测量。这使得耗时且需要中断生产过程的安装和卸载校准设备变得多余。研究人员建立了一个单轴装置的原型,利用IDS3010进行位置跟踪。其他传感器如CMOS相机被用来检测俯仰和偏摆。校准结果与常规校准系统的结果进行了比较,六个运动误差(位置、俯仰、偏摆、Y-直线度、Z-直线度)对这两个系统显示出良好的一致性。值得指出的是,使用IDS3010的总时间和成本显著降低。该装置演示了自动校准机床的个原型,而且自动程序减少了机器停机时间,从而在保持相同的精度水平下大的提高了生产率。更多信息请了解:Benjamin Montavon et al J. Manuf. Mater. Process. 2(1), 14 (2018)图5.1 自动校准激光探头安装示意图6.IDS3010激光干涉仪在工业C-T断层扫描设备中的应用工业C-T断层扫描被广泛用于材料测试和工件尺寸表征。几何测量系统是设计的锥束C-T系统的一大挑战。近期,瑞士联邦计量院(METAS)的科学家采用德国attocube公司的IDS3010皮米精度激光干涉仪用于X射线源、样品和探测器之间的精密位移跟踪。该实验共有八个轴用于位移跟踪。除了测量位移之外,该实验装置还能够进行样品台的角度误差分析。终实现非线性度小于0.1 um,锥束稳定性在一小时内优于10 ppb的高精度工业C-T。更多信息请了解:Benjamin A. Bircher, Felix Meli, Alain Küng, Rudolf Thalmann: "A geometry measurement system for a dimensional cone beam CT", 8th Conference on Industrial Computed Tomography (iCT 2018), At Wels, AU6.1激光干涉仪在系统中的测量定位示意图7.IDS3010激光干涉仪在增材制造3D打印中的应用微尺度选择性激光烧结(u-SLS)是制造集成电路封装构件(如微控制器)的一种创新方法。在大多数的增材制造中需要微米量的精度控制,然而集成电路封装的生产尺寸只有几微米,并且需要比传统的增材制造方法有更小的公差。德克萨斯大学和NXP半导体公司开发了一种基于u-SLS技术的新型3D打印机,用于制造集成电路封装。该系统包括用于在烧结站和槽模涂布台之间传送工件的空气轴承线性导轨。为满足导轨对定位精度高的要求,该系统采用德国attocube公司的皮米精度干涉仪IDS3010来进行位置的跟踪。更多信息请了解:Nilabh K. Roy, Chee S. Foong, Michael A. Cullinan: "Design of a Micro-scale Selective Laser Sintering System", 27th Annual International Solid Freeform Fabrication Symposium, At Austin, Texas, USA 7.1系统示意图,其中激光干涉仪被用作位移的测量和反馈8. IDS3010激光干涉仪在扫描荧光X射线显微镜中的应用在搭建具有纳米分辨率的X射线显微镜时,对系统稳定性提出了更高的要求。在整个实验过程中,必须确保各个组件以及组件之间的热稳定性和机械稳定性。德国attocube的IDS3010激光干涉仪具有优异的稳定性和测量亚纳米位移的能力,在40小时内表现出优于1.25 nm的稳定性,并且在100赫兹带宽的受控环境中具有优于300 pm的分辨率。因此,IDS3010是对上述X射线显微镜装置的所有部件进行机械控制的不二选择,使得整个X射线显微镜实现了40 nm的分辨率,而在数据收集所需的整个时间内系统稳定性优于45 nm。更多信息请了解:Characterizing a scanning fluorescence X ray microscope made with the displacement sensor 8.1荧光X射线显微镜的高分辨成像结果






















 我要推广仪器
我要推广仪器
 下载APP
下载APP