推荐厂家
暂无
暂无
 留言咨询
留言咨询
留言咨询
留言咨询
留言咨询
留言咨询

 400-860-5168转1982
留言咨询
400-860-5168转1982
留言咨询
 400-860-5168转2004
留言咨询
400-860-5168转2004
留言咨询
 留言咨询
留言咨询



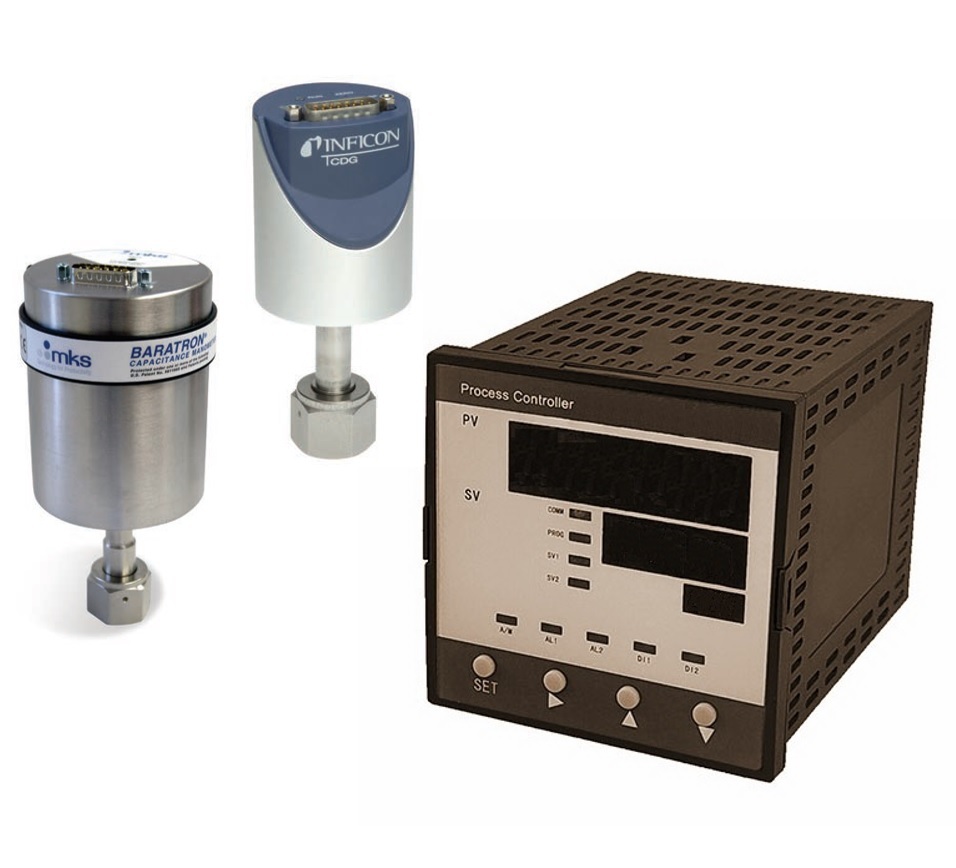

[align=center][color=#990000][b]超高精度浮辊和张力双回路控制器:Montalvo张力控制器的国产替代[/b][/color][/align][align=center][color=#990000]Unwind Tension Controller for Dancer Input with Tension Indication—— Domestic Substitution of Montalvo Tension Controller[/color][/align][align=center][img=超高精度浮辊和张力双回路控制器:Montalvo张力控制器的国产替代,690,542]https://ng1.17img.cn/bbsfiles/images/2022/10/202210092010572560_1350_3221506_3.jpg!w690x542.jpg[/img][/align][color=#990000]摘要:针对目前市场上张力控制器普遍存在的测控精度较差、功能单一、适用传感器类型少和PID参数无法自整定等问题,本文分析了国外浮辊和张力双通道控制器的技术特点。对标国外高端张力控制器产品,本文重点介绍了国产替代产品的性能,国产张力控制器同样具有浮辊和张力双回路控制功能,但由于每个通道都采用了24位AD、16位DA和双精度浮点运算,可以实现超高精度的张力控制,而所具有的PID自整定功能则使得操作更为快捷方便。[/color][align=center]~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~[/align][size=18px][color=#990000][b]一、问题的提出[/b][/color][/size]张力控制器主要应用于冶金,造纸,薄膜,染整,织布,塑胶,线材等设备上,是一种实现恒张力或者锥度张力控制的自动控制仪表,其作用主要是实现辊间的同步,收卷和放卷的均匀控制。一套典型的张力控制系统主要由张力控制器,张力读出器,张力检测器,制动器和离合器构成。根据环路可分为开环,闭环或自由环张力控制系统;根据对不同卷材的监测方式又可分为超声波式,浮辊式,跟踪臂式等。典型的张力控制器主要由AD,DA转换器和高性能微处理器等组成,张力控制器与张力传感器和电气比例阀组成典型的张力控制系统。在具体张力控制过程中,张力控制器是根据张力传感器和A/D模式转换器测量到的张力与设定的目标张力相比较后,经微处理器PID运算自动调整D/A输出从而改变电气比例阀的输出压力来实现卷料的张力调节,可广泛用于各种需对张力进行精密测控的场合,具有使用灵活和广泛的适用性。目前市场上有各种张力控制器,但在高精度张力控制过程中,普遍存在以下不足:(1)测量精度较低:普遍采用12位AD模数转换器,个别国外产品用了16位AD模数转换器,对于一些高精度的张力传感器输出显然无法准确测量,测量精度无法满足高精度控制要求。(2)输出精度较差:普遍采用12位DA数模转换器,个别国外产品用了14位DA数模转换器,对于一些高精度的张力控制显然无法实现。(3)浮点运算精度较差:目前市场上商品化张力控制器的PID运算基本都是采用单浮点方式进行,运算精度较差,从而使得输出百分比的最小调节量也只能为0.1%,根本无法进行电气比例阀输出压力的精细调节,进而无法实现超高精度的张力控制。(4)单通道控制:绝大多数张力控制器尽管可以实现如收放卷的扭矩控制,过程张力中的速度控制以及浮辊张力控制,但只能选择其中的一种控制模式。而个别国外的张力控制器产品,如Montalvo的Z4UI双回路控制器则能实现放卷扭矩和浮辊位置的同时控制。(5)传感器输入信号类型少:在各种张力控制中会采用到多种不同的传感器,如超声波探头,浮辊,电位器和激光等,这些不同传感器所输出的信号类型和量程有多种形式,但目前绝大多数张力控制器的输入型号类型非常有限。(6)PID参数无法自整定:在有些张力控制过程中,需要准确无超调的PID控制,快速且自动的选择合适PID则显着尤为重要,但目前很多张力控制器并没有这项PID参数自整定功能。针对上述目前张力控制器中普遍存在的问题,特别是为了实现超高精度张力控制以及相关控制器的国产替代,本文将对国外高端张力控制器技术特点进行分析,并对标国外产品介绍研发的新型浮辊和张力双回路超高精度控制器产品。[b][size=18px][color=#990000]二、Montalvo公司 Z4UI 双回路张力控制器技术特点分析[/color][/size][size=18px][color=#990000][/color][/size][/b]蒙特福Montalvo公司是国外著名的张力控制相关产品生产厂商,其最具特点的控制器产品是Z4UI浮辊和张力双回路控制器,我们将对标此张力控制器进行分析。蒙特福Z4UI浮辊和张力双回路控制系统结构如图1所示,控制器内置了张力指示器,能够同时检测浮辊电位计信号和张力检测器的张力信号,从而提供高精度的张力控制。它集合了浮辊吸收缓冲张力波动的功能和张力检测器精确、稳定的检测优势,通过渐进式“Progressive“ PID 控制电路调节放卷制动器的转矩输出,保持浮辊臂的位置不变来实现张力控制。模拟式张力表显示卷材的张力大小,操作员可直接监视张力稳定性,并根据张力表显示的实际卷材张力,来调节浮辊臂上的载荷从而保持理想张力。[align=center][color=#990000][img=01.Z4UI浮辊和张力双回路控制.jpg,690,275]https://ng1.17img.cn/bbsfiles/images/2022/10/202210092013010509_6406_3221506_3.jpg!w690x275.jpg[/img][/color][/align][align=center][color=#990000]图1 Z4UI双回路控制器在浮辊和张力控制系统中应用的结构示意图[/color][/align]由此可以看出,蒙特福Z4UI控制器是个典型的双回路闭环控制器。其中,一个回路是通过检测浮辊位置信号(DPS-1位置传感器或浮辊电位器)来控制第一个电气比例阀(I/P转换器)压力输出,由此来调整气缸位置将气压转换成扭矩输出达到张力调节。另一个回路通过检测卷径信号(接近开关或超声波探头)来控制第二个电气比例阀(I/P转换器)压力输出,由此来调整放卷位置达到张力调节。由此可见,蒙特福Z4UI双回路控制器是通过同时对两个变量的检测和控制来实现高精度的放卷调节。蒙特福Z4UI控制器的另外一个特点是采用RS-232与上位机(PLC或PC)进行通讯,采用控制软件进行所有操作,减少了人工界面操作的复杂程度。[b][size=18px][color=#990000]三、国产双回路超高精度张力控制器[/color][/size][/b]从上述蒙特福Z4UI双回路张力控制器技术特点可以看出,双回路张力控制器的核心技术内容就是一个非常典型的双通道PID控制器,张力的控制则是采用外置传感器实现电气比例阀的串级形式的PID控制,因此,双回路张力控制器的技术特征就是双通道的电气比例阀串级PID控制。基于此分析,结合我们在真空压力方面进行电气比例阀超高精度串级PID控制的成功经验,我们可以将通用型的VPC-2021系列PID调节器(单通道和双通道)应用于张力控制中,由此可完全实现蒙特福Z4UI双回路张力控制器的替代。VPC-2021-2系列双通道PID调节器是标准形式的工业用控制器,具有96×96mm、96×48mm和48×96mm三种规格,但其最大优点是具有超高精度检测和控制能力,其中具有24位AD模数转换、16位DA数模转换和双精度浮点运算能力,具备0.01%的最小输出百分比。用于张力控制的双通道超高精度PID控制器如图2所示,电气接线如图3所示,主要技术指标如下:[align=center][color=#990000][img=VPC 2021-2超高精度PID控制器,600,266]https://ng1.17img.cn/bbsfiles/images/2022/10/202210101508335313_3719_3221506_3.jpg!w690x307.jpg[/img][/color][/align][align=center][color=#990000]图2 VPC 2021-2系列双通道张力控制器[/color][/align](1)真彩色IPS TFT长寿命LED背光、全视角液晶显示。(2)独立双回路控制,每路控制输出刷新率50ms,双通道独立的输入和输出,双回路报警功能可以多功能应用,每通道都具备独立的PID控制功能,每个通道都可进行独立的手动和自动控制切换。(3)万能型信号检测能力,即每通道都具备47种输入信号形式,仅需通过设置极可完成信号类型和量程选择,由此可满足各种规格和形式的张力探测器的引入。除了能测量各种张力传感器、位置传感器给出的模拟电压、电流和电阻信号之外,还可以测量各种温度传感器和压力传感器等各种信号,传感器输出端直接接入控制器并在控制器上进行选择即可使用。(4)双通道独立控制输出,输出信号有线性电流、线性电压、继电器输出、固态继电器输出和可控硅输出五种形式,可用于直接驱动电气比例阀(或电子压力转换器)进行张力控制,也可以驱动各种阀门和加热器等执行机构进行真空度、压力和温度等参数的控制。(5)支持数字和模拟远程操作功能,支持标准MODBUS RTU 通讯协议。(6)采用自主改进型PID算法,支持对PV微分和无超调控制算法。5组PID存储和调用,10组输出限幅等实用功能。每个通道采用独立的PID参数,且可独立的进行PID参数自整定。(7)带传感器馈电供电功能(24V,50mA)。(8)支持一路过程变量变送功能,变送的过程变量可选PV测量值、SV设定值、控制输出值和偏差值,变送输出类型有4-20mA, 0-10mA, 0-20mA, 0-10V, 2-10V, 0-5V, 1-5V七种。(9)两组开关量光隔输入端,可以实现各种应用功能的灵活应用切换。(10)随机配备强大的控制软件,可通过软件进行控制参数设置、运行控制、过程曲线显示和存储,非常便于过程控制的调试。[align=center][img=,690,276]https://ng1.17img.cn/bbsfiles/images/2022/10/202210101726466183_8818_3221506_3.png!w690x276.jpg[/img][/align][align=center][color=#990000]图3 VPC 2021-2系列双通道控制器电气连接图[/color][/align]从上述国产控制器技术指标可以看出,国产VPC 2021-2系列双通道控制器的性能和功能要远优于蒙特福Z4UI控制器,并具有强大的拓展能力,完全可以实现对蒙特福Z4UI控制器的替代。[align=center]~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~[/align][align=center][/align][align=center][/align][align=center][/align]
绝大部分陶瓷企业反映,陶瓷墨水在运用过程中经常出现拉线、发色效果差等问题,这与陶瓷墨水的稳定性有极大关系。陶瓷墨水拉线经常在大面积深色喷墨打印时出现,其与喷头本身有很大的联系,但本质上还是因为墨水体系不稳定,着色剂轻易团聚、沉降,堵塞喷头或者残余油墨粘附在喷头上。可通过选择结晶度高、中位粒径小、粒度分布窄的色料,选择合适的分散系统与合适的分散剂等方法来解决此问题。 此外,陶瓷墨水的稳定性还牵涉到墨滴与坯体结合的问题。在实际生产中存在墨滴在坯体上润湿性不好以及墨滴在坯体上过度扩散的问题。润湿性不好可以添加恰当的分散剂,从而降低墨水体系的表面张力,使得陶瓷墨水中非极性的有机物能够与极性的陶瓷坯体形成润湿。至于墨水在坯上过度扩散,可能是由于墨水的表面张力过小,亦可通过控制分散剂的添加量的方法来解决。http://image.keyan.cc/data/bcs/2014/1222/w127h2685408_1419211939_188.jpg 陶瓷喷墨技术 因此,选择适合的分散剂/润湿剂以及控制其添加量显得极其重要。 一般说来,分散剂的性能和体系的润湿剂含量与其表面张力的大小有紧密的联系。所以,通常以测量分散剂的表面张力来确定分散剂的性能和体系的润湿剂含量,从而量化得出分散剂/润湿剂的性能与添加量。 表面张力的测量一般分为传统的拉环/拉板法与新兴的最大气泡法。传统的拉环/拉板法是以往较为常用的测试方法,但因其有清洗麻烦、寿命短和易受客观条件影响的弊端,特别是不能反应墨水的动态表面张力已被逐渐淘汰。而新兴的最大气泡法表面张力仪测量喷墨的动态表面张力,得出动态部份的数据与墨水的性能有密切相关, 而且操作简便、测量快捷准确、使用寿命长和不易受客观条件影响等优点,现已被陶瓷墨水行业广泛接受与认可。 德国SITA公司研发的表面张力仪是基于起泡压力法原理,和对比所提及的测试方法,它提供一个简便、实惠、可靠应用的方法。因为动态表面张力可以提供给你一个与动态时间和速度相关的数据,一边在打印质量上作出结论。http://image.keyan.cc/data/bcs/2014/1222/w140h2685408_1419211966_226.jpg 动态表面张力仪可以用于检测测量分散剂的表面张力,提高墨水的稳定性 如果需要,动态表面张力仪在选择一个长的气泡寿命时间时,也可以提供准静态的表面张力值。 同时动态表面张力仪还可作为与优质(竞争对手)产品的差异对比、选择性价比高的分散剂、进出产品质量控制、与客户沟通解决问题的有力工具。
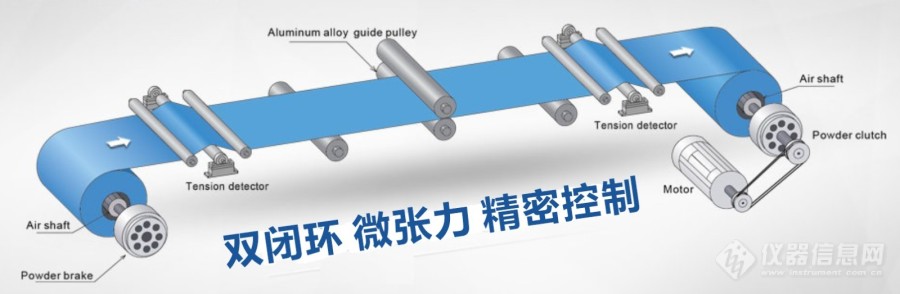
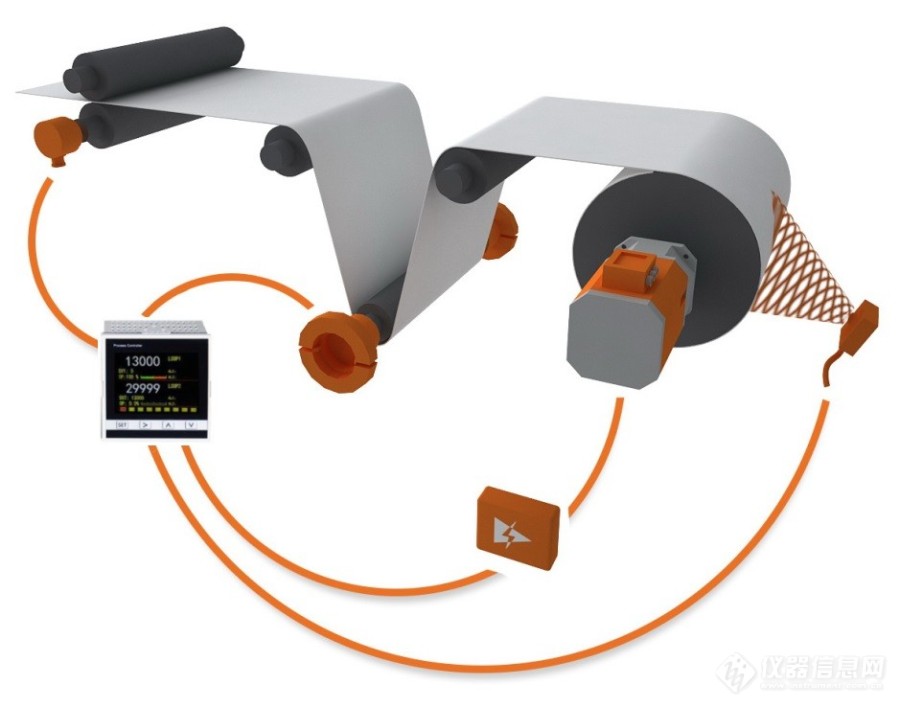
[size=16px][color=#339999][b]摘要:采用当前的各种涂布机很难适用气体扩散层这类脆性材料的涂布工艺,需要控制精度更高的微张力控制系统。为此本文基于串级控制原理,提出了采用双闭环PID控制模式和超高精度PID张力控制器的解决方案,一方面形成浮动摆棍闭环和主动辊闭环构成的串级控制回路,另一方面是采用目前测控精度最高的工业用PID控制器,结合相应配套的高精度传感器和执行器,可真正实现微张力的精密控制。[/b][/color][/size][align=center] [img=微张力精密控制,690,225]https://ng1.17img.cn/bbsfiles/images/2023/07/202307261628010805_2785_3221506_3.jpg!w690x225.jpg[/img][/align][size=16px] [/size][size=18px][color=#339999][b]1. 问题的提出[/b][/color][/size][size=16px] 气体扩散层(GDL)在燃料电池中起到支撑催化层、收集电流、传导气体和排出反应产物水的重要作用,常用于质子交换膜燃料电池,在具体生产工艺中需要在GDL材料表面定量涂布一层特定功能涂料。由于GDL基体层材料较脆,涂布工艺过程中易造成基体层材料断裂或撕裂,转弯处易折断,在高温状态下材料比常温下更脆弱,一般要求涂布过程中控制张力设定在5~10N很窄的一个范围内,且还需要在此微张力范围内具有较高的控制精度。[/size][size=16px] 传统涂布设备,浮动摆辊均为气缸驱动,直线电位器反馈摆辊位置。存在以下问题:[/size][size=16px] (1)无法精确控制摆辊位置。[/size][size=16px] (2)气缸行程只有一个方向,需要料膜的张力平衡气缸推力,易造成GDL脆性材料拉伸。[/size][size=16px] (3)摆辊瞬间偏移至一端时,料膜张力瞬间增大或减小,极易造成GDL脆性材料的撕裂甚至断裂。[/size][size=16px] (4)张力控制器中的模数转换AD精度和数模转换DA精度较低,最小输出百分比也只能达到0.1%,无法提供更高精度的测量和控制。[/size][size=16px] 由此可见,为实现GDL脆性材料的微张力控制,实现具有精度高、张力小、控制稳的伺服电机驱动的浮动摆辊微张力控制是氢能材料制备的关键技术,为此本文提出了相应的解决方案。[/size][size=18px][color=#339999][b]2. 解决方案[/b][/color][/size][size=16px] 为实现涂布工艺中的微张力高精度控制,本文提出的解决方案包含以下两方面的内容:[/size][size=16px] (1)采用双闭环PID控制形式调节料膜张力,即对浮动摆棍和主动辊进行独立的PID控制。[/size][size=16px] (2)采用超高精度的双通道PID控制器,每个通道都具有24位AD、16位DA和0.01%最小输出百分比。[/size][size=16px] 解决方案所涉及的微张力控制系统结构如图1所示。[/size][align=center][size=16px][color=#339999][b][img=双闭环微张力控制系统结构示意图,500,200]https://ng1.17img.cn/bbsfiles/images/2023/07/202307261628351448_1980_3221506_3.jpg!w690x277.jpg[/img][/b][/color][/size][/align][align=center][size=16px][color=#339999][b]图1 双闭环微张力控制系统结构示意图[/b][/color][/size][/align][size=16px] 在图1所示的双闭环控制系统中,浮动摆辊PID闭环控制的具体过程是根据工艺要求,给控制器输入张力值,控制器根据张力传感器信号与设定张力值之差进行快速PID计算后输出控制信号,此控制信号控制浮动摆辊伺服驱动器和伺服电机动作,从而使浮动摆棍产生偏移使得料膜张力快速达到设定值。[/size][size=16px] 浮动摆辊的PID闭环控制过程主要是通过浮动摆辊偏移来调节料膜张力,主动辊速度仍为主机速度,并未参与调节。当浮动摆辊伺服电机持续动作调节料膜张力时,浮动摆辊偏差会导致累积,最终达到浮动摆辊位置报警值。因此仅由浮动摆辊伺服电机调节料膜张力不能完全解决张力不稳、精度不高的问题,为此增加主动辊PID闭环控制实现张力的精准控制。[/size][size=16px] 第二路主动辊PID闭环控制的具体过程是在浮动摆辊PID闭环控制实现调节后,由于浮动摆辊偏离中位,位移传感器跟随浮动摆辊偏移产生对应的偏移电压信号并输入给控制器,控制器根据此偏移电压信号与0V值的正负偏差进行快速PID计算后输出控制信号,此信号控制主动辊伺服驱动和主动辊伺服电机来改变主动辊速度,使得浮动摆棍回到中位,最终实现GDL脆性材料的微张力精准控制。[/size][size=18px][color=#339999][b]3. 总结[/b][/color][/size][size=16px] 综上所述,通过上述解决方案,可很好的解决微张力的精密控制问题,具体优点如下:[/size][size=16px] (1)解决方案所采用的双闭环控制结构,实际上是一个非常典型的串级控制结构,因此充分利用了串级控制结构的优势,更利于实现高精度张力的控制。[/size][size=16px] (2)制约微张力精密控制的另一个主要因素是控制器的精度普遍不高,采用PLC很难达到超高的采集和控制精度。因此,本解决方案中采用了超高精度的双通道PID控制,既使用了串级控制功能,又实现了超高精度的PID控制。[/size][size=16px] 当然,传感器和执行器精度也是制约微张力精密控制的因素,为了真正实现微张力的精密控制,还需在使用串级控制和超高精度PID控制器的基础上,配备相应高精度的传感器和执行器。[/size][size=16px][/size][size=16px][/size][align=center][b][color=#339999]~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~[/color][/b][/align][align=center][b][color=#339999][/color][/b][/align][align=center][b][color=#339999][/color][/b][/align][align=center][b][color=#339999][/color][/b][/align][align=center][b][color=#339999][/color][/b][/align]









 我要推广仪器
我要推广仪器
 下载APP
下载APP