上海硅酸盐所在柔性有机/无机热电复合材料研究中取得进展
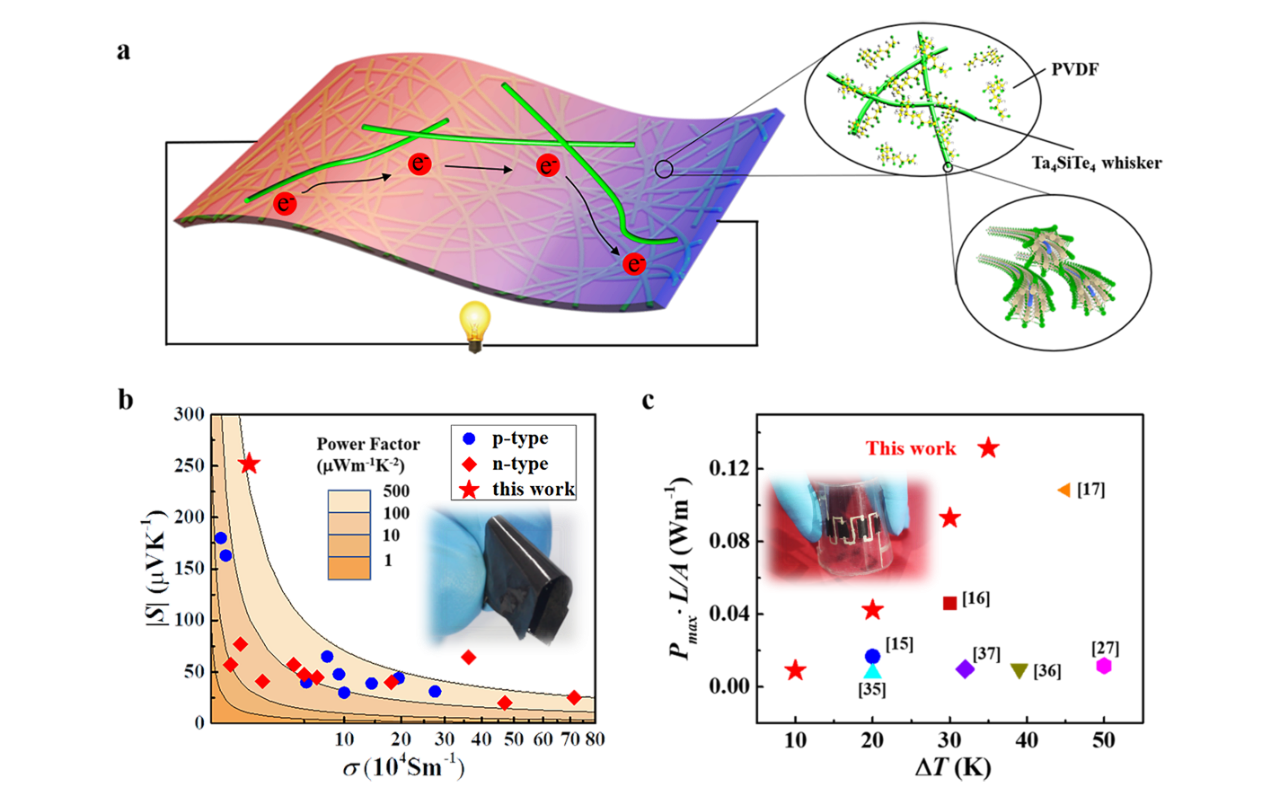
p style=" text-align: justify text-indent: 2em " 柔性热电能量转换技术可将环境或人体温差转化成电能实现电子设备的自供电,在可穿戴等领域具有广阔的应用前景。传统无机热电材料具有优异的热电性能,但不具备柔性功能;而有机热电材料虽具有良好的柔性和弯曲性能,但热电性能极低。 /p p style=" text-align: justify text-indent: 2em " 有机/无机复合热电材料可综合无机材料的热电高性能和有机材料的良好弯曲性能,成为近年来的研究热点。具有一维结构的碳纳米管或金属纳米线可以与有机材料的一维分子链形成紧密连接的导电网络,并沿链网络提供高导电通道,因此常被用于有机/无机复合热电材料的研究。但碳纳米管或金属纳米线极低的泽贝克系数导致复合材料的泽贝克系数难以提高。而无机热电材料虽然具有高泽贝克系数,但是其形状通常为片状或颗粒状,导致复合材料低的电输运性能。因此,如何选择匹配的有机/无机材料从而获得良好的电输运成为有机/无机复合热电材料研究的关键科学问题。 /p p style=" text-align: justify text-indent: 2em " span style=" text-indent: 2em " 最近,中国科学院上海硅酸盐研究所研究员史迅、陈立东、副研究员仇鹏飞、瞿三寅等与美国克莱姆森大学教授贺健合作,提出了一种维度匹配的热电复合材料设计新策略,即使用同样具有一维结构的无机半导体材料制备高性能PVDF/Ta4SiTe4有机/无机柔性热电复合薄膜,其原型器件在35.5K温差下归一化最大功率密度为目前已报道的柔性热电器件中的最高值。相关研究成果以Conformal organic–inorganic semiconductor composites for flexible thermoelectrics& nbsp 为题& nbsp ,发表于Energy & amp Environmental Science上。 /span /p p style=" text-align: justify text-indent: 2em " 有机材料聚偏氟乙烯(PVDF)具有一维链状结构,是一种具有优良柔性的绝缘体。基于维度匹配的设计思路,该团队选择了同样具有一维结构的Ta sub 4 /sub SiTe sub 4 /sub 无机材料与PVDF进行复合制备有机/无机柔性复合薄膜。通过化学气相输运反应,得到Ta位掺杂0.5% Mo的Ta sub 4 /sub SiTe sub 4 /sub 一维晶须。然后以N,N-二甲基甲酰胺(DMF)作为分散剂,通过滴涂的方法得到PVDF/Ta sub 4 /sub SiTe sub 4 /sub 复合薄膜。扫描电镜发现Ta sub 4 /sub SiTe sub 4 /sub 晶须均匀分散于PVDF基体之中构成网络状结构。透射电镜表明Ta sub 4 /sub SiTe sub 4 /sub 晶须与PVDF形成紧密结合的两相界面。热电性能表征发现PVDF/50 wt% Ta sub 4 /sub SiTe sub 4 /sub 具有优良电输运性能,在220 K功率因子高达1060 μWm sup -1 /sup K sup -2 /sup 。特别是,在相同的电导率下,PVDF/50 wt% Ta sub 4 /sub SiTe sub 4 /sub 薄膜的泽贝克系数远高于基于碳纳米管或金属纳米线的有机/无机复合薄膜。Ta sub 4 /sub SiTe sub 4 /sub 自身的半导体输运特性和一维结构共同产生了上述的优良电输运性能。 /p p style=" text-align: justify text-indent: 2em " 在实现优良电输运性能的同时,维度匹配的PVDF和Ta sub 4 /sub SiTe sub 4 /sub 所形成的有机/无机复合薄膜也具有良好的柔性。在直径9 mm的曲面上反复弯曲5000次,PVDF/50 wt% Ta sub 4 /sub SiTe sub 4 /sub 薄膜电阻没有明显变化。研究团队初步制备了包含4个PVDF/50 wt% Ta sub 4 /sub SiTe sub 4 /sub 热电单偶的原型热电器件,在温差35.5K时,器件归一化最大功率密度达到0.13 Wm sup -1 /sup ,是现有报道的柔性热电器件的最大值。 /p p style=" text-align: justify text-indent: 2em " 研究工作得到国家重点研发专项、国家自然科学基金、中科院青年创新促进会、上海市青年科技启明星项目等的资助和支持。 /p p style=" text-align: justify text-indent: 2em " a href=" https://pubs.rsc.org/en/content/articlelanding/2020/EE/C9EE03776D#!divAbstract" target=" _self" style=" color: rgb(0, 112, 192) text-decoration: underline " span style=" color: rgb(0, 112, 192) " strong 文章链接 /strong /span /a /p p style=" text-align: center text-indent: 0em " img style=" max-width:100% max-height:100% " src=" https://img1.17img.cn/17img/images/202006/pic/6b411bc8-07d4-4c5e-b683-14cb4ba70432.jpg" / /p p style=" text-align: justify text-indent: 2em " 图a) PVDF/Ta4SiTe4柔性复合薄膜示意图。b) PVDF/Ta4SiTe4复合薄膜与已报道的一维有机-无机复合薄膜热电性能对比。c)PVDF/Ta4SiTe4基原型热电器件与已报道的柔性热电器件的归一化最大功率密度对比。 /p p style=" text-align: center text-indent: 0em " img style=" max-width:100% max-height:100% " src=" https://img1.17img.cn/17img/images/202005/webinar/17b432cd-d148-45fa-bf58-e391bf686e5a.jpg!w1920x420.jpg" / /p p style=" text-align: justify text-indent: 2em " 为促进全国各地高校、科研院所、企业等相关从业人员进行复合材料性能表征与检测技术交流, strong 仪器信息网将于2020年6月15日举办“复合材料性能表征与评价”主题网络研讨会 /strong ,邀请领域内杰出专家和业内人士围绕复合材料力学与物理性能、损伤与破坏、宏微观多尺度模拟、疲劳特性等方面带来精彩报告,并为参会人员搭建网络互动平台进行学术交流。 /p p style=" text-indent: 0em text-align: center " img style=" max-width:100% max-height:100% " src=" https://img1.17img.cn/17img/images/202006/pic/50354d2d-5cea-442b-80b6-44b14d98eaf9.jpg" / /p p style=" text-indent: 0em text-align: center " img style=" max-width:100% max-height:100% " src=" https://img1.17img.cn/17img/images/202006/pic/9432a056-9d8f-4709-aa7c-c26f5e53f32b.jpg" / /p p style=" text-align: center text-indent: 0em " strong span style=" text-indent: 2em " 参会方式(手机电脑均可参会) /span /strong br/ /p p style=" text-align: justify text-indent: 2em " 1、 a href=" https://www.instrument.com.cn/webinar/meetings/FHCL/" target=" _self" style=" color: rgb(0, 112, 192) text-decoration: underline " span style=" color: rgb(0, 112, 192) " 官网报名 /span /a ,通过审核后您将收到通知;态度敷衍乱填将不予审核。 /p p style=" text-align: justify text-indent: 2em " 2、会议当天您将收到短信提醒。点击短信链接,输入报名手机号,即可参会。 /p















 我要推广仪器
我要推广仪器
 下载APP
下载APP