推荐厂家
暂无
暂无

 留言咨询
留言咨询
 留言咨询
留言咨询
 留言咨询
留言咨询



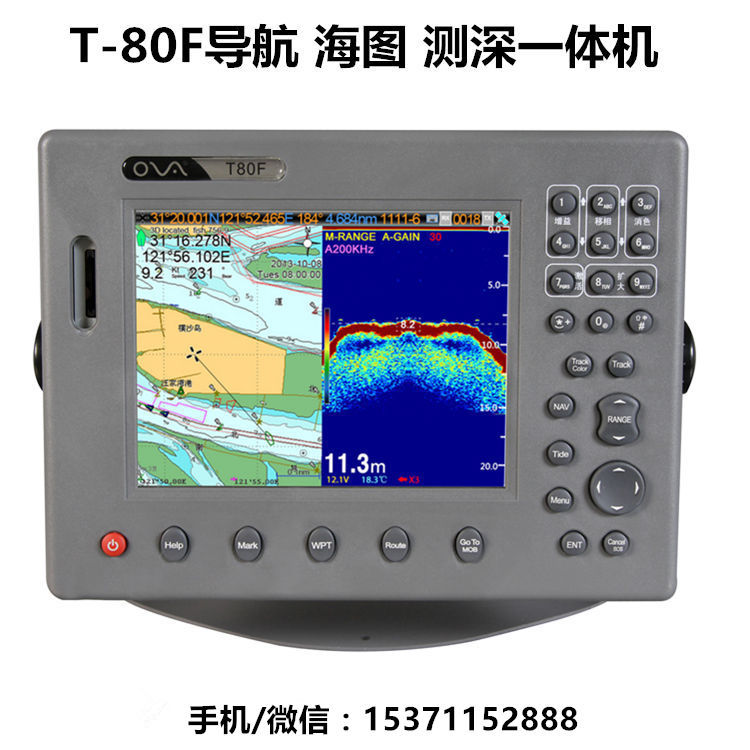
随着汽车的普及和道路的建设,城际间的经济往来更加频繁,车载GPS导航仪显得很重要,准确定位、导航、娱乐功能集于一身的导航更能满足车主的需求,成为车上的基本装备。可这些导航设备究竟准确率有多高呢?但现在的导航仪也不管用了,曾经有日本游客在澳大利亚用导航仪开进了大海! 采访中记者了解到,好多车主都遇到过导航仪误导的情况。那么,导航仪为何频频出现错误提示呢?央视最近的一份调查表明,国内13家主流厂商、18个型号的导航仪产品的合格率竟然不超过30%,仅有少数厂商的产品能够通过完整的10项测试指标。据了解,硬件、软件、地图三部分是影响产品质量的主要因素,其中软件和地图是导航仪准确与否的关键。导航软件编制的缺陷,会导致语音提示延迟、绕路、重复掉头指令等现象。而如今道路交通状况时常发生变化,如导航仪里的地图没有及时更新就会导致指引偏差;此外,不少车主为了省钱安装使用盗版地图的导航设备,则更容易发生误导现象。 根据这份调查,记者也走访了我市的导航仪市场。在海勃湾黄河街一家专营导航仪的汽车用品店,记者看到,这里的导航产品分为多个品牌,根据功能、质量和使用地图的不同,价格从300元到数千元不等。“导航准确度高吗?”记者问店主。对方表示,高端导航产品使用的是一知名品牌的地图,绝对是正版,使用前需要激活,但为了地图的准确度,需要每年更新一次,费用在200元左右。而问到一款价格在300元左右的导航时,店主则明确表示,这款导航用的是“破解版地图”,并非正版,准确度肯定不及使用正版地图的导航设备。 由此可以看出,如果购买一个高准确的导航仪至关重要。第一要看看看卫星信号接收模块的芯片是第几代的,芯片的高低是决定GPS准确性和速度的重要元件。选择落后的芯片,就意味着你的汽车到路口的时候需要等待GPS告知你怎样走之后,你才能开车行走。第二要准以看看地图更新的速度,现在各个地方建设和发展的速度都很快,厂家如果不及时提供地图更新服务,你的GPS就没有太大的用途了。第三要看看厂家为你提供地图免费更新的时间有多长。所以,选择GPS导航仪的时候,既要看硬件,又要看软件,否则的话,你买到手的GPS就是用处不大的废物一个。
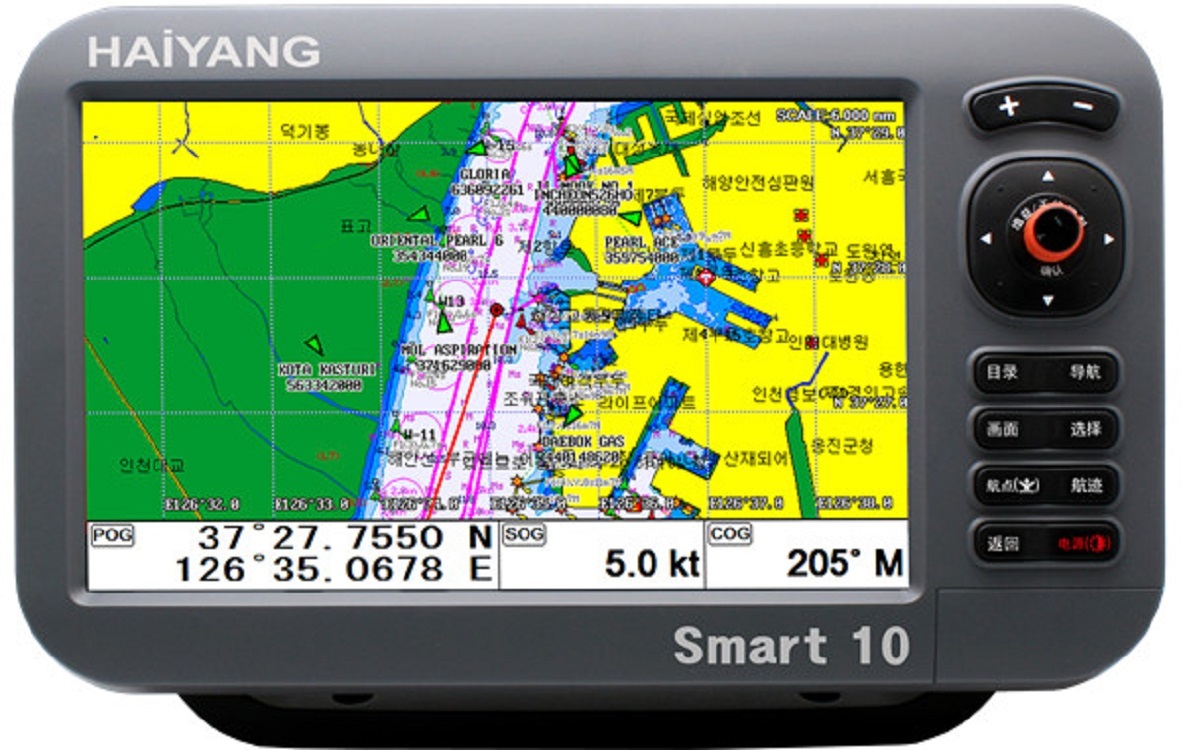
现在导航仪在市场上那是非常普遍了,要选择好的产品那就得货比三家1.导航功能 使用者在车载GPS导航系统上任意标注两点后,导航系统便会自动根据当前的位置,为车主设计最佳路线。另外,它还有修改功能,假如用户因为不小心错过路口,没有走车载GPS导航系统推荐的最佳线路,车辆位置偏离最佳线路轨迹200米以上,车载GPS导航系统会根据车辆所处的新位置,重新为用户设计一条回到主航线路线,或是为用户设计一条从性位置到终点的最佳线路。 2.转向语音提示功能 车辆只要遇到前方路口或者转弯,车载GPS语音系统提示用户转向等语音提示。这样可以避免车主走弯路。它能够提供全程语音提示,驾车者无需观察起显示界面就能实现导航的全过程,使得行车更加安全舒适 3.增加兴趣点功能 由于我国大部分城市都处于建设阶段,随时随地都有可能冒出新的建筑物,由此,电子地图的更新也成为众多消费者关心的问题。因此遇到一些电子地图上没有的目标点,只要你感兴趣或者认为有必要,可将该点或者新路线增加到地图上。这些新增的兴趣点,与地图上原有的任何一个点一样,均可套用进电子地图查阅等功能。 4.定位 GPS通过接收卫星信号,可以准确地定出其所在的位置,位置误差小于10米。如果机器里带地图的话,就可以在地图上相应的位置用一个记号标记出来。同时,GPS还可以取代传统的指南针,显示方向,取代传统的高度计,显示海拔高度等信息。 5.测速 通过GPS对卫星信号的接收计算,可以测算出行驶的具体速度,比一般的里程表准确很多。 6.显示航迹 如果去一个陌生的地方,去的时候有人带路,回来时怎么办?不用担心,GPS带有航迹记录功能,可以记录下用户您车辆行驶经过的路线,小于10米的精度,甚至能显示两个车道的区别。回来时,用户可以启动它的返程功能,让它领着你顺着来时的路线顺利回家。
X射线脉冲星导航系统由X射线成像仪和光子计数器(探测器)、星载原子时钟、星载计算设备、导航模型算法库和脉冲星模型数据库组成。从X射线脉冲星导航原理框图中可以看到,脉冲星导航定位和姿态测量分别在两个环路中实现,前者的输入信息为光子计数器提取的脉冲信号和相位,输出为卫星位置、速度和时间信息 后者的输入信息为X射线成像仪提取的脉冲星角位置,输出为卫星姿态角分量。 1.X射线脉冲星导航定位 基于X射线脉冲星的卫星自主导航定位的实现流程如下: (1)脉冲到达时间测量 星载探测器接收X射线光子,光子计数器输出脉冲信号和相位信息 脉冲信号进入原子时钟的锁相环路,修正本地时钟漂移,标定和输出脉冲到达时间。 (2)脉冲到达时间转换改正 调用基本参数数据库和脉冲星模型数据库,对罗默(Roemer)延迟、歇皮诺(Shapiro)延迟、爱因斯坦(Einstein)延迟、光行差延迟和星际色散效应等误差项进行改正,转换得到在太阳系质心坐标系中的脉冲到达时间测量值。 (3)脉冲到达时间与预报时间对比 调用脉冲星模型数据库,提取标准脉冲轮廓和脉冲计时模型,由脉冲计时模型预报脉冲到达时间 整合测量脉冲轮廓,并与标准轮廓进行相关处理,得到脉冲到达时间差(基本观测量)。 (4)卡尔曼滤波处理 利用多颗脉冲星组成基本观测向量,构造脉冲星导航定位测量方程,调用卫星摄动轨道力学方程、星载时钟系统状态方程和卡尔曼滤波器,得到卫星位置、速度和时间偏差估计。 (5)导航参数预报 利用导航定位偏差估计值,可以修正卫星近似位置、速度和时间等参数 分别采用数值积分方法和星载时钟模型短时预报卫星位置、速度和时间等导航参数,输出到卫星平台控制系统,自主进行轨道控制和钟差修正。 2.X射线脉冲星姿态测量 利用X射线脉冲星信号测定卫星姿态的方法与星体跟踪器类似,区别在于是用X射线代替可见光观测。一旦X射线成像仪提取脉冲星影像,脉冲星在探测器平面和星体坐标系的角位置也就随之确定。由于脉冲星相对于太阳系质心坐标系的位置已精确测定,因此可以进行星体坐标系与太阳系质心坐标系之间的旋转变换。于是,可以直接提取坐标变换的欧拉角信息,或利用姿态四元素方法进行滤波估计,最终获得卫星俯仰、滚动和偏航等姿态信息,并输出到卫星平台控制系统,自主进行飞行姿态控制。










 我要推广仪器
我要推广仪器
 下载APP
下载APP