推荐厂家
暂无
暂无

 留言咨询
留言咨询
 留言咨询
留言咨询

 400-860-5168转3512
留言咨询
400-860-5168转3512
留言咨询

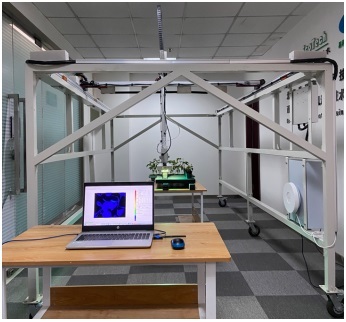
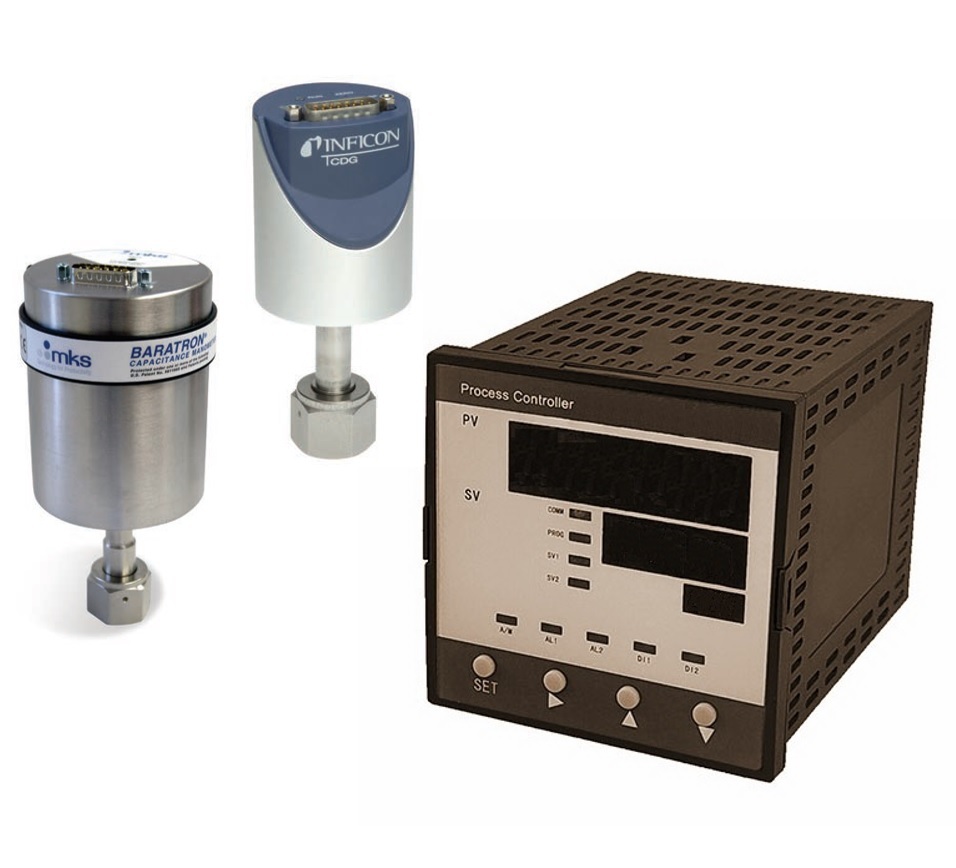
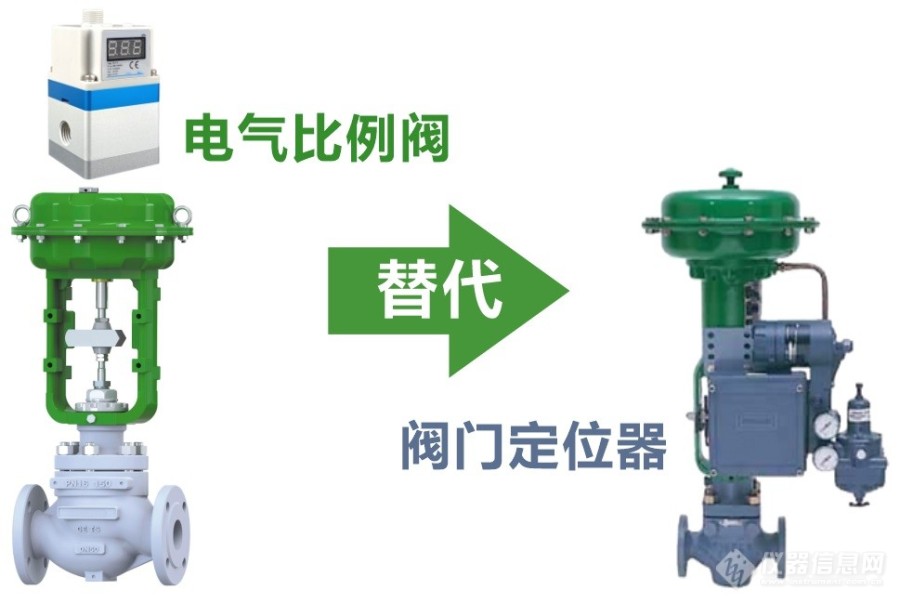
[color=#ff0000]摘要:针对气动调节阀中的阀门调节装置,本文介绍了调节装置的技术发展过程,描述了调节装置从机械阀门定位器发展到电气阀门定位器和电气比例阀压力控制器的技术更新过程和内容。特别是针对目前广泛使用的电气阀门定位器与基于最新技术的电气比例阀压力控制器进行了详细对比,说明了电气比例阀势必会替代目前所使用的各种阀门定位器。本文还详细介绍了基于串级控制方法的电气比例阀压力控制器的典型应用。[/color][align=center][img=阀门定位器的技术发展及其更新换代——电气比例阀,590,395]https://ng1.17img.cn/bbsfiles/images/2022/12/202212150224314813_1592_3221506_3.jpg!w690x462.jpg[/img][/align][align=center][/align][align=center]~~~~~~~~~~~~~~~~~[/align][b][size=24px][color=#ff0000]1. 阀门定位器的技术发展过程[/color][/size][/b] 为了对气动调节阀进行自动调节以准确控制流体介质的流量和压力,作为气动调节阀的主要配套附件,阀门定位器接受外部调节器的控制信号,通过在气动调节阀顶部输入较大压力使得调节阀阀杆上下移动,从而实现对气动调节阀阀门开度的准确调节。阀门定位器的技术发展经历了以下几个阶段:[b][size=18px][color=#ff0000]1.1 机械阀门定位器[/color][/size][/b] 图1所示为气动调节阀与经典的机械式阀门定位器配套运行的原理图。[align=center][color=#ff0000][img=01.机械阀门定位器,500,434]https://ng1.17img.cn/bbsfiles/images/2022/12/202212150229559032_2716_3221506_3.jpg!w690x600.jpg[/img][/color][/align][align=center][color=#ff0000][b]图1 气动调节阀与机械阀门定位器的工作原理图[/b][/color][/align] 当阀门定位器有信号输入时,力矩马达产生电磁场,杠杆2受电磁场力影响带动挡板靠近喷嘴。喷嘴的背压增加,经过气动放大器放大后,将气源的一部分送入气动薄膜调节阀的顶部气室,随着顶部气室压力的增大,隔膜向下变形使得阀杆带着阀芯向下移动逐渐将阀门开度变小。此时,与阀杆相连的反馈杆(图中摆杆)绕着支点向下移动,使轴的前端向下移动,与其连接的偏心凸轮做逆时针旋转,滚轮顺时针旋转向左移动,从而拉伸反馈弹簧。 由于反馈弹簧拉伸杠杆2下段向左移动,此时就会与力矩马达输出的力矩达到平衡,于是阀门就固定在某个位置不再动作。在阀门定位器运行过程中,它将阀杆上下位移信号作为反馈测量信号,以外部控制器的输入信号作为设定信号,并进行比较,当两者有偏差时,改变其到执行机构的输出信号,使执行机构动作,建立阀杆位移量与外部控制器输出信号之间的一一对应关系。由此可见,阀门定位器是以阀杆位移为测量信号,以外部控制器输入为设定信号,以气体压力输出为执行器的闭环反馈控制系统,即外部控制器的输出信号对应于气动调节阀的开度大小。[b][size=18px][color=#ff0000]1.2 电气阀门定位器[/color][/size][/b] 从上述机械阀门定位器的工作原理可以看出,阀门定位器主要起到两个作用,一是提供与控制电信号成线性关系的气体压力给气动调节阀,从而改变调节阀的开度大小;二是测量和反馈阀杆位置,以准确知道气动调节阀的开度大小。随着技术的进步,出现了如图2所示的电气转换器来代替机械阀门定位器中的喷嘴、挡板调压系统,以实现对输出气体压力的调节控制,从而实现阀门位置的精确定位,其工作原理如图3所示。[align=center][b][color=#ff0000][img=02.电气转换器,300,315]https://ng1.17img.cn/bbsfiles/images/2022/12/202212150230296831_4135_3221506_3.jpg!w690x726.jpg[/img][/color][/b][/align][align=center][b][color=#ff0000]图2 电气转换器(I/P或E/P转换器)[/color][/b][/align][align=center][b][color=#ff0000][img=03.电气阀门定位器工作原理图,600,313]https://ng1.17img.cn/bbsfiles/images/2022/12/202212150230490440_5933_3221506_3.jpg!w690x361.jpg[/img][/color][/b][/align][align=center][b][color=#ff0000]图3 气动阀门定位器的工作原理图[/color][/b][/align] 电气转换器的输入电流/电压信号与输出压力信号成比例关系,如输入信号从4-20mA变化时,电气转换器的输出气体压力会在20-100kPa范围内变化,从而将电流信号转换成了压力信号。电气转换器相当于是一个1:1的放大器,只不过其接收的是电信号。由于电气转换器与气动调节阀没有机械连接,因此比机械阀门定位器具有安装、调试、维修方便等优点。 电气转换器可以直接安装在气动调节阀上来使用,不需要安装反馈阀杆,但因没有反馈环节,无法成为一个闭环控制系统。因此,通常是将电气转换器与阀杆定位功能配套使用,构成电气阀门定位器。 由于组合了电气转换器和阀门定位功能,使得电气阀门定位器的功能和作用有了进一步的扩展,如可用来提高阀门位置的线性度。另外,由于克服了阀杆摩擦力和消除了调节阀不平衡力的影响,电气阀门定位器很适合应用在高压介质、高压差场合、快速调节场合以及想改善调节阀流量特性的场合,也还适用于大口径调节阀和高低温介质调节阀。目前,电气阀门定位器已经在逐步替代机械阀门定位器,是目前市场上的主流阀门定位器。[b][size=18px][color=#ff0000]1.3 电气比例阀压力控制器[/color][/size][/b] 从上述电气阀门定位器工作原理可以看出,电气转换器使用过程中并不知道加载到气动调节阀膜片上的压力值是多少,还需增加阀杆位置反馈装置才能实现阀门开度的准确测量和控制。这也就是说,如果准确已知加载在气动调节阀膜片上的气体压力值,根据此压力与膜片变形量和阀杆的线性关系,就可以准确知道压力与气动调节阀开度的线性关系。由此,此问题就可以归结为气动调节阀顶部气室内的气体压力测量和控制问题。 电气比例阀作为一种高速和准确的压力控制器,是近十年来发展起来的新技术,它使用了两个高速伺服或电磁(或压电)阀来根据需要增加或降低气体压力以实现减压压力控制。与电气转换器技术相比,电气比例阀压力控制器提供了更高的压力和更大的灵活性和鲁棒性。典型的电气比例阀压力控制器及其工作原理如图4所示。[align=center][color=#ff0000][b][img=04.电气比例阀及其工作原理示意图,550,355]https://ng1.17img.cn/bbsfiles/images/2022/12/202212150231124953_2987_3221506_3.jpg!w690x446.jpg[/img][/b][/color][/align][b][/b][align=center][b][color=#ff0000]图4 电气比例阀压力控制器及其工作原理图[/color][/b][/align] 如图4所示,电气比例阀的基本工作原理是一种典型的气体动态平衡法,即通过使用一个高速进气阀和一个高速排气阀使内部压力保持动态平衡,使得位于两阀中间位置处的压力保持在所需的设定值上。一个压力传感器监控输出压力,一个数字或模拟控制器同时调节伺服阀(电磁阀)的快速开启关闭以控制设定点压力。 从结构上来说,电气比例阀是一个完整的闭环控制阀,包括两个高速电磁阀、一个底座、一个积分压力传感器和一个电子PID控制电路。 在电气比例阀压力控制器中,二个高速电磁阀分别控制进气、出气。进气阀门的操控与电子电路供给的压力信号成比例。内置压力传感器测量输出压力并提供反馈信号到PID控制电路。反馈信号与压力控制设定值相比较,当二者之间不同时,使其中一个阀门打开。如果要达到系统所需的压力,就会使进气阀动作,按比例消除比较信号中的差异。 典型电气比例阀通常需要直流电源和代表压力设定点的模拟信号进行工作。控制器通常接受电流(4~20mA)或电压(通常0~10或0~5VDC)输入信号。除了常见的模拟信号标准外,带数字电路的型号还可以接受串口通信(如RS-485或DeviceNet)。电气比例阀还提供代表压力传感器的模拟信号输出。有些型号的电气比例阀还会包含一个小放气阀(向大气排放少量气体),以便在非常低或无流量情况下使用。[b][size=24px][color=#ff0000]2. 电气比例阀与电气转换器的对比[/color][/size][/b] 从上述的介绍可以看出,电气转换器和电气比例阀的基本功能相同,都可用来进行减压控制,都属于电子式减压阀,但所用技术、功能和指标并不相同。表1对这两类压力调节阀进行更详细的对比。[align=center][b][color=#ff0000]表1 电气比例阀和电气转换器性能比较表[/color][/b][/align][align=center][img=T1.电气比例阀和电气转换器比较表,600,451]https://ng1.17img.cn/bbsfiles/images/2022/12/202212150231388150_4925_3221506_3.jpg!w690x519.jpg[/img][/align][align=center][/align] 由此可见,电气比例阀压力控制器可以提供快速高精度的压力控制,并能够提供所控压力的反馈信号,而且电气比例阀压力控制器可以直接连接到气动调节阀上使用,应用和维护更加的简便,可完全替代电气阀门定位器,这也是目前各种流量压力应用领域的发展趋势。[b][size=24px][color=#ff0000]3. 电气比例阀压力控制器的典型应用[/color][/size][/b] 结合各种减压型气动调节阀,结合各种减压型气动调节阀电气比例阀压力控制器可应用于各种流体介质的压力和流量控制,最典型的应用场景是外置压力传感器对减压介质的压力进行准确控制,如图5所示。[align=center][b][color=#ff0000][img=05.电气比例阀压力控制器典型应用,600,397]https://ng1.17img.cn/bbsfiles/images/2022/12/202212150232117234_9508_3221506_3.jpg!w690x457.jpg[/img][/color][/b][/align][align=center][b][color=#ff0000]图5 电气比例阀结合外置传感器和控制器的压力控制[/color][/b][/align] 对于一般采用电气阀门定位器和电气比例阀压力控制器的气动调节阀控制回路,它们都可以直接安装在气动调节阀上进行控制,但只能与气动调节阀顶部气室形成控制回路,仅相当于一个电子信号控制阀门开度的控制器,无法对被控流体介质压力进行反馈控制,而这恰恰是所有装置希望实现的最终目的。 为了实现工程应用中工艺压力的准确控制,如图5所示,最准确和可靠的方法是增加压力传感器对被控介质压力进行实时测量,传感器压力型号反馈到外置PID控制器,由PID控制器根据设定值或设定程序对电气比例阀进行控制。由此,外置的压力传感器和PID控制器,与电气比例阀和气动减压阀构成一个完整的闭环控制回路,可真正实现介质压力的准确和快速控制。 图5所示的电气比例阀压力控制典型应用,其最大特点是采用了串级控制方法,可充分发挥串级控制的优势,在实现无超调快速控制的同时,还可以达到很高的控制精度。[b][size=24px][color=#ff0000]4. 总结[/color][/size][/b] 从上述技术综述和分析对比可以看出,电气比例阀采用了更新的技术,与现有传统的电气转换器相比具有更优异的性能,电气比例阀正在快速对电气转换器形成升级替换,特别是随着电气比例阀的价格逐渐降低,已逐渐成为电气压力控制领域内主要产品。 另外,由于电气比例阀内置了压力传感器和PID控制器,同时结合串级、比值和分程等复杂控制模式,为电气比例阀提供了极其丰富的拓展应用,可广泛应用于许多压力控制场合,即采用电气比例阀可很方便的与其他物理量(如温度、位移、出力等)的探测和控制组成更复杂的控制回路,实现众多工业应用领域中的精密控制功能。[align=center][/align][align=center]~~~~~~~~~~~~~[/align]
ABB定位器AV1 & AV2应用范围广泛,能提供快速、灵敏、高精度的定位器控制。适用于单、双作用,直行程、角行程执行器。从执行机构到定位器的一个机械连杆提供位置反馈。3个不同的特性化凸轮提供给客户灵活的选择,设定信号和执行器位置之间关系可以选:平方根、线性化、平方。ABB定位器AV1的选择接受外部的气动信号,并转化为一个气动输出。这个气动输出一个推动执行机构的力。ABB定位器AV2的选择接受外部的4-20mA信号并转化为一个气动输出,这个气动输出驱动执行机构动作。ABB定位器AV1 & AV2的产品数据紧凑、坚固的设计适用于高振动的环境快速、精确的校正单双作用通用可使用天然气作为气源可选隔爆型电器转换器ABB定位器电气AV3 & AV4应用范围广泛,适用于单、双作用,直行程、角行程执行器。从执行机构到定位器的一个机械连杆提供位置反馈。3个不同的特性化凸轮提供给客户灵活的选择,设定信号和执行器位置之间关系可以选:平方根、线性化、平方。ABB定位器电气AV3的选择接受外部的4-20mA信号并转化为一个气动输出,这个气动输出驱动执行机构动作。AV3具有失信号保位的功能。ABB定位器电气AV4的选择接受外部的24V脉冲信号并转化为一个气动输出,这个气动输出驱动执行机构动作。AV4具有失信号保位的功能。AV3 & AV4的产品数据紧凑、坚固的设计适用于高振动的环境快速、精确的校正单双作用通用可使用天然气作为气源
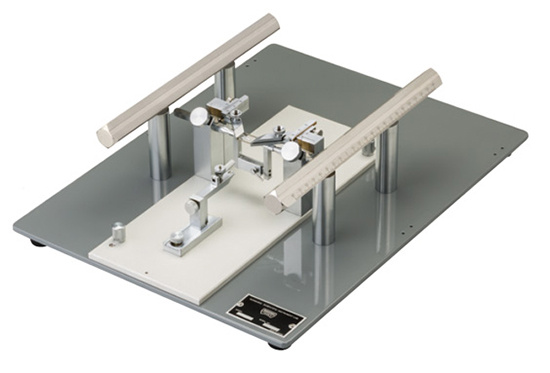
[url=http://www.f-lab.cn/stereotaxis/srp-6m-ht2.html][b]小鼠MRI立体定位器SRP-6M-HT2[/b][/url]是用于核磁共振环境的[b]小鼠立体定位仪器[/b],它采用兼容MRI的材料制造,是[b]小鼠核磁共振[/b]和显微操作实验的理想选择。[b]小鼠MRI立体定位器SRP-6M-HT2[/b]头部固定器组件是由100%塑料制成,AP框架棒和基板都由金属制成,保证了稳定和精确的立体定位记录,头部固定组件能够从基板拆卸下来,使得MRI可以扫描固定在相应位置的动物,核磁共振扫描之后,相应位置固定着动物的头部固定组件,能够轻易地放回在基板的原有位置,[b]小鼠MRI立体定位器SRP-6M-HT2[/b]能够用于多种多样的应用,只需更换头部固定组件用于小鼠,结合该设备可以注入标记或造影剂,用于MRI扫描,头部固定组件可以进行立体定位,记录对准动物的MRI扫描点。[img=小鼠MRI立体定位器]http://www.f-lab.cn/Upload/srp-6m-ht2_.jpg[/img][b]小鼠MRI立体定位器SRP-6M-HT2特色[/b]自从NARISHIGE的立体定位操作器根据此标准制作后,AP框架具有18.7mm的方形形状。如提供的 SM-15 立体定位显微操作器。需要带显微操作器的版本请访问SRP-6M。SRP-5M-HT2 和 SRP-6M-HT2 之间的差别在于AP框架杆的数目。 SRP-5装配有一个AP框架杆,而SRP-6装配有两个AP框架杆。用于大鼠的版本分别是SRP-5R-HT2 和 SRP-6R-HT2(SRP-5R 和 SRP-6R不带显微操作器)小鼠MRI立体定位器:[url]http://www.f-lab.cn/stereotaxis/srp-6m-ht2.html[/url]











 我要推广仪器
我要推广仪器
 下载APP
下载APP


