推荐厂家
暂无
暂无
 400-860-5168转4452
400-860-5168转4452
 留言咨询
留言咨询
 400-860-5168转2793
留言咨询
400-860-5168转2793
留言咨询
 400-860-5168转2793
留言咨询
400-860-5168转2793
留言咨询


激光粒度分析仪的检测速度据我所知,就在1000-20次/秒不等,不知道该指标对仪器的性能影响有多大?请您指教。
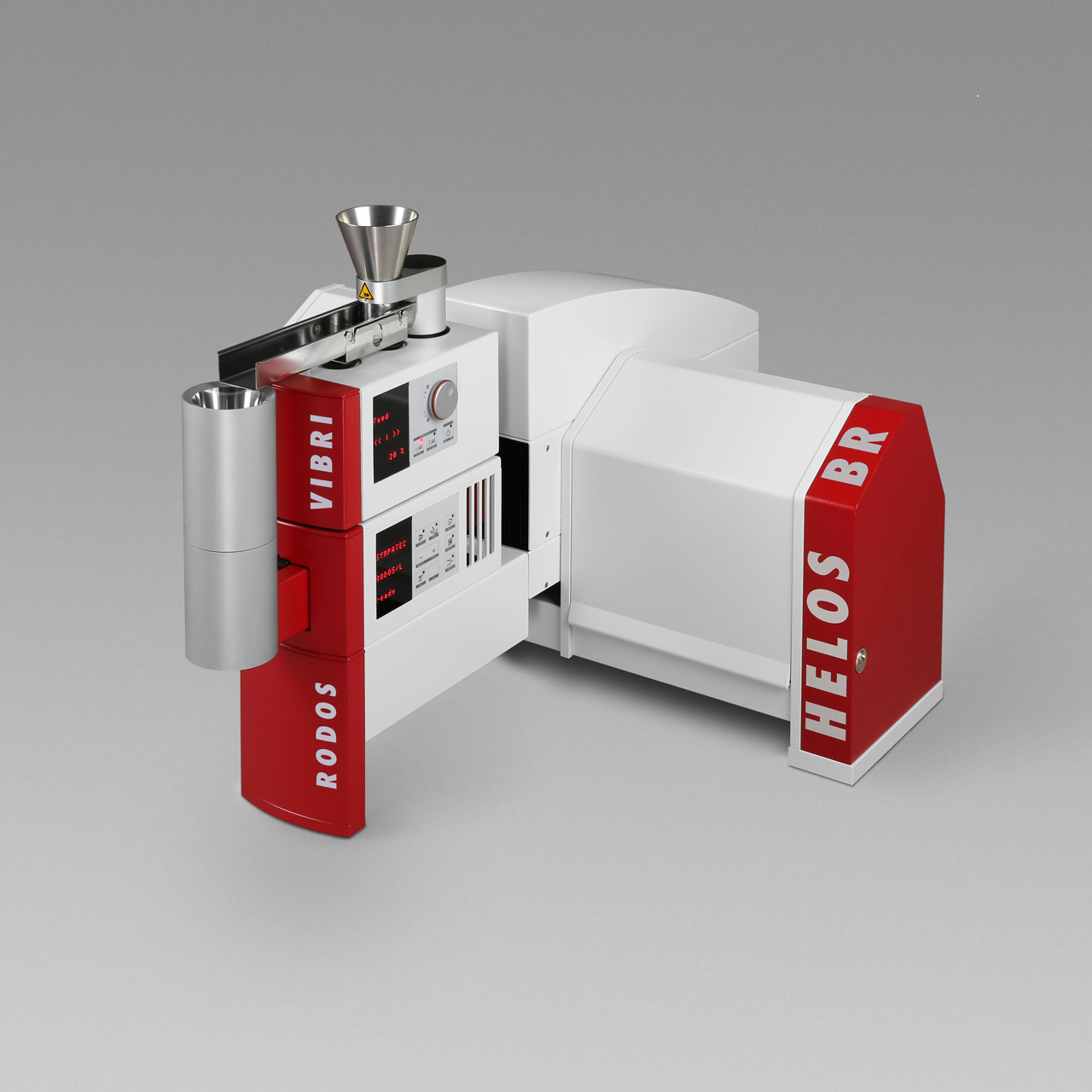
[font=微软雅黑][size=10.5pt][color=#333333]激光粒度仪是通过颗粒的衍射或散射光的空间分布(散射谱)来分析颗粒大小的仪器,采用Furanhofer衍射及Mie散射理论,测试过程不受温度变化、介质黏度,试样密度及表面状态等诸多因素的影响,只要将待测样品均匀地展现于激光束中,即可获得准确的测试结果。主要应用于建材、化工、冶金、能源、食品、电子、地质、军工、航空航天、机械、高校、实验室,研究机构等领域。[/color][/size][/font][font=微软雅黑][size=10.5pt][color=#333333]激光粒度仪主要类型:[/color][/size][/font][font=微软雅黑][size=10.5pt][color=#333333]1.静态激光[/color][/size][/font][font=微软雅黑][size=10.5pt][color=#333333] 能谱是稳定的空间分布。主要适用于微米级颗粒的测试,经过改进也可将测量下限扩展到几十纳米。[/color][/size][/font][font=微软雅黑][size=10.5pt][color=#333333]2.动态激光[/color][/size][/font][font=微软雅黑][size=10.5pt][color=#333333] 根据颗粒布朗运动的快慢,通过检测某一个或二个散射角的动态光散射信号分析纳米颗粒大小,能谱是随时间高速变化。动态光散射原理的粒度仪仅适用于纳米级颗粒的测试。[/color][/size][/font][font=微软雅黑][size=10.5pt][color=#333333]3.光透沉降[/color][/size][/font][font=微软雅黑][size=10.5pt][color=#333333] 通常所说激光粒度仪是指衍射和散射原理的粒度仪,光透沉降仪,依据的原理是斯托克斯沉降定律而不是激光衍射/散射原理,因此这类仪器不能称作激光粒度仪。[/color][/size][/font][font=微软雅黑][size=10.5pt][color=#333333] 在以往的粒度分析技术方法中,通常采用筛分或沉降法。常用的沉降法存在检测速度慢(特别是小颗粒)、重复性差、非球形颗粒误差大、不适用于混合物料(即颗粒的比重必须一致才能更准确)、动态范围较窄等缺点。激光衍射法的发明,彻底克服了沉降法的缺点,大大降低了劳动强度,加快了样品检测速度(从半小时到一分钟)。[/color][/size][/font][font=微软雅黑][size=10.5pt][color=#333333] 激光衍射法测量颗粒大小的依据是:小颗粒对激光的散射角较大,大颗粒对激光的散射角较小。通过测量散射角,可以计算出颗粒的尺寸。光学理论是以迈克尔斯理论和弗朗霍夫理论为基础的。[/color][/size][/font]
激光粒度仪一般采用米氏散射原理。米氏散射理论是对处于均匀介质中的各向均匀同性的单个样品,在单色平行光照射下的Maxwell方程边界条件的严格数学解;当微粒半径的大小接近于或者大于入射光线的波长时,大部分的入射光线会沿着前进的方向进行散射,这种现象被称为米氏散射。与其他光学散射理论相比,米式散射的程度跟波长是无关的,而且光子散射后的性质也不会改变,因此在测量精度要求高的测试仪器中应用广泛。济南微纳等激光粒度仪生产厂家都是采用的这种原理~










 我要推广仪器
我要推广仪器
 下载APP
下载APP