进口VS出口,从海关数据看坐标测量机10亿级市场的较量
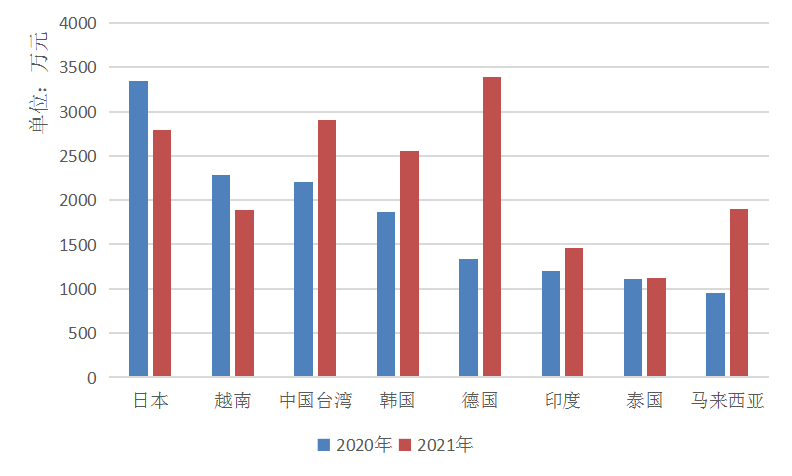
p style=" text-align: justify text-indent: 2em " strong 仪器信息网讯 /strong 坐标测量机是一种应用坐标测量原理的典型的高精度检测设备,广泛应用于航空、航天、 span style=" text-indent: 2em " 机械、电子、磨具等各种制造业的尺寸及形位公差测量。近年来,我国坐标测量机市场每年以近10%的速度增长,但与之不相称的是国外品牌测量机在快速增长,而国内测量机制造商却增长较慢,尤其在高端市场方面,亚微米级别(特别是0.5& nbsp μm以下)的计量型坐标测量机几乎全部被进口产品垄断。 /span /p p style=" text-align: justify text-indent: 2em " 坐标测量机的进出口数据在一定程度上可以反映出我国测量机整体市场的一些情况。为此,机器信息网特对2018年1月-2020年6月的坐标测量机海关进出口数据进行了汇总分析,为大家更深一步了解我国目前坐标测量机市场做一个参考。& nbsp /p p style=" text-align: center text-indent: 0em " br/ /p section style=" box-sizing: border-box text-align: justify " section style=" text-align: center margin: 10px 0% position: static box-sizing: border-box " powered-by=" xiumi.us" section style=" display: inline-block width: auto vertical-align: top min-width: 10% max-width: 100% height: auto line-height: 0 letter-spacing: 0px box-sizing: border-box " section style=" position: static box-sizing: border-box " powered-by=" xiumi.us" section style=" display: flex flex-flow: row nowrap position: static box-sizing: border-box " section style=" display: inline-block vertical-align: middle width: auto flex: 100 100 0% align-self: center height: auto line-height: 0 letter-spacing: 0px background-image: linear-gradient(270deg, rgb(226, 12, 7) 0%, rgba(226, 12, 7, 0) 100%) margin: 0px box-sizing: border-box " section style=" position: static box-sizing: border-box " powered-by=" xiumi.us" section class=" group-empty" style=" display: inline-block width: 10px height: 1px vertical-align: top overflow: hidden box-sizing: border-box " svg viewbox=" 0 0 1 1" style=" float:left line-height:0 width:0 vertical-align:top " /svg /section /section /section section style=" display: inline-block vertical-align: middle width: auto flex: 0 0 0% height: auto align-self: center line-height: 0 letter-spacing: 0px margin: 0px padding: 0px 1px box-sizing: border-box " section style=" position: static transform: rotateZ(45deg) -webkit-transform: rotateZ(45deg) -moz-transform: rotateZ(45deg) -o-transform: rotateZ(45deg) box-sizing: border-box " powered-by=" xiumi.us" section style=" position: static box-sizing: border-box " section class=" group-empty" style=" display: inline-block width: 8px height: 8px vertical-align: top overflow: hidden border-top: 1px solid rgb(226, 12, 7) border-top-left-radius: 0px border-bottom-width: 0px border-left: 1px solid rgb(226, 12, 7) border-bottom-left-radius: 0px box-sizing: border-box " svg viewbox=" 0 0 1 1" style=" float:left line-height:0 width:0 vertical-align:top " /svg /section /section /section /section section style=" display: inline-block vertical-align: middle width: auto flex: 100 100 0% align-self: center height: auto background-image: linear-gradient(90deg, rgb(226, 12, 7) 0%, rgba(226, 12, 7, 0) 100%) line-height: 0 letter-spacing: 0px box-sizing: border-box " section style=" position: static box-sizing: border-box " powered-by=" xiumi.us" section class=" group-empty" style=" display: inline-block width: 10px height: 1px vertical-align: top overflow: hidden box-sizing: border-box " svg viewbox=" 0 0 1 1" style=" float:left line-height:0 width:0 vertical-align:top " /svg /section /section /section /section /section section style=" display: inline-block width: 100% vertical-align: top line-height: 1.5 letter-spacing: 0px box-sizing: border-box " powered-by=" xiumi.us" section style=" position: static box-sizing: border-box " powered-by=" xiumi.us" section style=" display: flex flex-flow: row nowrap position: static box-sizing: border-box " section style=" display: inline-block vertical-align: middle width: auto flex: 0 0 0% height: auto line-height: 0 letter-spacing: 0px align-self: center margin: 0px 0px 0px 30px box-sizing: border-box " section style=" position: static box-sizing: border-box " powered-by=" xiumi.us" section class=" group-empty" style=" display: inline-block width: 8px height: 8px vertical-align: top overflow: hidden background-position: 50% 50% background-repeat: no-repeat background-size: contain background-attachment: scroll background-image: url(" box-sizing:=" " & nbsp svg viewbox=" 0 0 1 1" style=" float:left line-height:0 width:0 vertical-align:top " /svg /section /section /section section style=" display: inline-block vertical-align: middle width: auto flex: 100 100 0% height: auto align-self: center box-sizing: border-box " section style=" text-align: justify font-size: 17px color: rgb(221, 49, 49) letter-spacing: 1.8px line-height: 1.5 padding: 0px 8px box-sizing: border-box " powered-by=" xiumi.us" p style=" text-align: center white-space: normal margin-top: 0px margin-bottom: 0px padding: 0px box-sizing: border-box " 从进出口数据看坐标测量机市场 strong style=" letter-spacing: 1.8px box-sizing: border-box " /strong /p /section /section section style=" display: inline-block vertical-align: middle width: auto flex: 0 0 0% height: auto line-height: 0 letter-spacing: 0px align-self: center margin: 0px 30px 0px 0px box-sizing: border-box " section style=" position: static box-sizing: border-box " powered-by=" xiumi.us" section class=" group-empty" style=" display: inline-block width: 8px height: 8px vertical-align: top overflow: hidden background-position: 50% 50% background-repeat: no-repeat background-size: contain background-attachment: scroll background-image: url(" box-sizing:=" " svg viewbox=" 0 0 1 1" style=" float:left line-height:0 width:0 vertical-align:top " /svg /section /section /section /section /section /section section style=" position: static box-sizing: border-box " powered-by=" xiumi.us" section style=" display: flex flex-flow: row nowrap transform: translate3d(0px, 0px, 1px) rotateX(180deg) -webkit-transform: translate3d(0px, 0px, 1px) rotateX(180deg) -moz-transform: translate3d(0px, 0px, 1px) rotateX(180deg) -o-transform: translate3d(0px, 0px, 1px) rotateX(180deg) position: static box-sizing: border-box " section style=" display: inline-block vertical-align: middle width: auto flex: 100 100 0% align-self: center height: auto line-height: 0 letter-spacing: 0px background-image: linear-gradient(270deg, rgb(226, 12, 7) 0%, rgba(226, 12, 7, 0) 100%) margin: 0px box-sizing: border-box " section style=" position: static box-sizing: border-box " powered-by=" xiumi.us" section class=" group-empty" style=" display: inline-block width: 10px height: 1px vertical-align: top overflow: hidden box-sizing: border-box " svg viewbox=" 0 0 1 1" style=" float:left line-height:0 width:0 vertical-align:top " /svg /section /section /section section style=" display: inline-block vertical-align: middle width: auto flex: 0 0 0% height: auto align-self: center line-height: 0 letter-spacing: 0px margin: 0px padding: 0px 1px box-sizing: border-box " section style=" position: static transform: rotateZ(45deg) -webkit-transform: rotateZ(45deg) -moz-transform: rotateZ(45deg) -o-transform: rotateZ(45deg) box-sizing: border-box " powered-by=" xiumi.us" section style=" position: static box-sizing: border-box " section class=" group-empty" style=" display: inline-block width: 8px height: 8px vertical-align: top overflow: hidden border-top: 1px solid rgb(226, 12, 7) border-top-left-radius: 0px border-bottom-width: 0px border-left: 1px solid rgb(226, 12, 7) border-bottom-left-radius: 0px box-sizing: border-box " svg viewbox=" 0 0 1 1" style=" float:left line-height:0 width:0 vertical-align:top " /svg /section /section /section /section section style=" display: inline-block vertical-align: middle width: auto flex: 100 100 0% align-self: center height: auto background-image: linear-gradient(90deg, rgb(226, 12, 7) 0%, rgba(226, 12, 7, 0) 100%) line-height: 0 letter-spacing: 0px box-sizing: border-box " section style=" position: static box-sizing: border-box " powered-by=" xiumi.us" section class=" group-empty" style=" display: inline-block width: 10px height: 1px vertical-align: top overflow: hidden box-sizing: border-box " svg viewbox=" 0 0 1 1" style=" float:left line-height:0 width:0 vertical-align:top " /svg /section /section /section /section /section /section /section /section p style=" text-align: center " img style=" max-width:100% max-height:100% " src=" https://img1.17img.cn/17img/images/202009/uepic/254aebc3-5fad-4d09-b5da-92c2276bc8a0.jpg" title=" 图片1.jpg" alt=" 图片1.jpg" / /p p style=" text-align: justify text-indent: 2em " 2018年中美贸易战打响,坐标测量机经历了两轮对美加征关税,其进口市场受到冲击,2019年进口额为8.4亿元,较2018年降低了25%。从2020上半年的进口额来看,因新冠疫情的影响,坐标测量机的进口市场再次受到冲击。2020上半年坐标测量机进口额为2.8亿元,较2019年同期降低了30%。 /p p style=" text-align: center " img style=" max-width:100% max-height:100% " src=" https://img1.17img.cn/17img/images/202009/uepic/921314df-35ad-485b-a706-6e572cc85b94.jpg" title=" 图片2.jpg" alt=" 图片2.jpg" / /p p style=" text-align: justify text-indent: 2em " 根据海关数据,近三年我国主要从德国、日本、美国、意大利、英国、法国、瑞士、新加坡、韩国等地进口坐标测量机。其中,原产于德国的坐标测量机进口额远高于其它地区,2018年1月至2020年6月,自德国进口的坐标测量机金额达10.8亿元,是排名第二地区(日本)的2.6倍。在进口额排名前十的地区中,除英国、法国、瑞士和新加坡,其余六个地区2019年的进口额较2018年均有所下降。 /p p style=" text-align: center " img style=" max-width:100% max-height:100% " src=" https://img1.17img.cn/17img/images/202009/uepic/d3c04804-3f19-41cb-b21d-186a9d11ac93.jpg" title=" 图片3.jpg" alt=" 图片3.jpg" / /p p style=" text-align: justify text-indent: 2em " 上海、山东、江苏、广东、北京、浙江、湖南、重庆、四川、吉林是坐标测量机进口额排名前十的收货人注册地。其中,上海市的进口额领先,2018年1月至2020年6月的进口额达11.5亿元;山东省和江苏省两地的进口额相近,2018年1月至2020年6月的进口额分别为7.7亿元和7.5亿元。 /p p style=" text-align: center " & nbsp /p section style=" box-sizing: border-box text-align: justify " section style=" text-align: center margin: 10px 0% position: static box-sizing: border-box " powered-by=" xiumi.us" section style=" display: inline-block width: auto vertical-align: top min-width: 10% max-width: 100% height: auto line-height: 0 letter-spacing: 0px box-sizing: border-box " section style=" position: static box-sizing: border-box " powered-by=" xiumi.us" section style=" display: flex flex-flow: row nowrap position: static box-sizing: border-box " section style=" display: inline-block vertical-align: middle width: auto flex: 100 100 0% align-self: center height: auto line-height: 0 letter-spacing: 0px background-image: linear-gradient(270deg, rgb(226, 12, 7) 0%, rgba(226, 12, 7, 0) 100%) margin: 0px box-sizing: border-box " section style=" position: static box-sizing: border-box " powered-by=" xiumi.us" section class=" group-empty" style=" display: inline-block width: 10px height: 1px vertical-align: top overflow: hidden box-sizing: border-box " svg viewbox=" 0 0 1 1" style=" float:left line-height:0 width:0 vertical-align:top " /svg /section /section /section section style=" display: inline-block vertical-align: middle width: auto flex: 0 0 0% height: auto align-self: center line-height: 0 letter-spacing: 0px margin: 0px padding: 0px 1px box-sizing: border-box " section style=" position: static transform: rotateZ(45deg) -webkit-transform: rotateZ(45deg) -moz-transform: rotateZ(45deg) -o-transform: rotateZ(45deg) box-sizing: border-box " powered-by=" xiumi.us" section style=" position: static box-sizing: border-box " section class=" group-empty" style=" display: inline-block width: 8px height: 8px vertical-align: top overflow: hidden border-top: 1px solid rgb(226, 12, 7) border-top-left-radius: 0px border-bottom-width: 0px border-left: 1px solid rgb(226, 12, 7) border-bottom-left-radius: 0px box-sizing: border-box " svg viewbox=" 0 0 1 1" style=" float:left line-height:0 width:0 vertical-align:top " /svg /section /section /section /section section style=" display: inline-block vertical-align: middle width: auto flex: 100 100 0% align-self: center height: auto background-image: linear-gradient(90deg, rgb(226, 12, 7) 0%, rgba(226, 12, 7, 0) 100%) line-height: 0 letter-spacing: 0px box-sizing: border-box " section style=" position: static box-sizing: border-box " powered-by=" xiumi.us" section class=" group-empty" style=" display: inline-block width: 10px height: 1px vertical-align: top overflow: hidden box-sizing: border-box " svg viewbox=" 0 0 1 1" style=" float:left line-height:0 width:0 vertical-align:top " /svg /section /section /section /section /section section style=" display: inline-block width: 100% vertical-align: top line-height: 1.5 letter-spacing: 0px box-sizing: border-box " powered-by=" xiumi.us" section style=" position: static box-sizing: border-box " powered-by=" xiumi.us" section style=" display: flex flex-flow: row nowrap position: static box-sizing: border-box " section style=" display: inline-block vertical-align: middle width: auto flex: 0 0 0% height: auto line-height: 0 letter-spacing: 0px align-self: center margin: 0px 0px 0px 30px box-sizing: border-box " section style=" position: static box-sizing: border-box " powered-by=" xiumi.us" section class=" group-empty" style=" display: inline-block width: 8px height: 8px vertical-align: top overflow: hidden background-position: 50% 50% background-repeat: no-repeat background-size: contain background-attachment: scroll background-image: url(" box-sizing:=" " svg viewbox=" 0 0 1 1" style=" float:left line-height:0 width:0 vertical-align:top " /svg /section /section /section section style=" display: inline-block vertical-align: middle width: auto flex: 100 100 0% height: auto align-self: center box-sizing: border-box " section style=" text-align: justify font-size: 17px color: rgb(221, 49, 49) letter-spacing: 1.8px line-height: 1.5 padding: 0px 8px box-sizing: border-box " powered-by=" xiumi.us" p style=" text-align: center white-space: normal margin-top: 0px margin-bottom: 0px padding: 0px box-sizing: border-box " 从出口数据看坐标测量机市场 strong style=" letter-spacing: 1.8px box-sizing: border-box " /strong /p /section /section section style=" display: inline-block vertical-align: middle width: auto flex: 0 0 0% height: auto line-height: 0 letter-spacing: 0px align-self: center margin: 0px 30px 0px 0px box-sizing: border-box " section style=" position: static box-sizing: border-box " powered-by=" xiumi.us" section class=" group-empty" style=" display: inline-block width: 8px height: 8px vertical-align: top overflow: hidden background-position: 50% 50% background-repeat: no-repeat background-size: contain background-attachment: scroll background-image: url(" box-sizing:=" " svg viewbox=" 0 0 1 1" style=" float:left line-height:0 width:0 vertical-align:top " /svg /section /section /section /section /section /section section style=" position: static box-sizing: border-box " powered-by=" xiumi.us" section style=" display: flex flex-flow: row nowrap transform: translate3d(0px, 0px, 1px) rotateX(180deg) -webkit-transform: translate3d(0px, 0px, 1px) rotateX(180deg) -moz-transform: translate3d(0px, 0px, 1px) rotateX(180deg) -o-transform: translate3d(0px, 0px, 1px) rotateX(180deg) position: static box-sizing: border-box " section style=" display: inline-block vertical-align: middle width: auto flex: 100 100 0% align-self: center height: auto line-height: 0 letter-spacing: 0px background-image: linear-gradient(270deg, rgb(226, 12, 7) 0%, rgba(226, 12, 7, 0) 100%) margin: 0px box-sizing: border-box " section style=" position: static box-sizing: border-box " powered-by=" xiumi.us" section class=" group-empty" style=" display: inline-block width: 10px height: 1px vertical-align: top overflow: hidden box-sizing: border-box " svg viewbox=" 0 0 1 1" style=" float:left line-height:0 width:0 vertical-align:top " /svg /section /section /section section style=" display: inline-block vertical-align: middle width: auto flex: 0 0 0% height: auto align-self: center line-height: 0 letter-spacing: 0px margin: 0px padding: 0px 1px box-sizing: border-box " section style=" position: static transform: rotateZ(45deg) -webkit-transform: rotateZ(45deg) -moz-transform: rotateZ(45deg) -o-transform: rotateZ(45deg) box-sizing: border-box " powered-by=" xiumi.us" section style=" position: static box-sizing: border-box " section class=" group-empty" style=" display: inline-block width: 8px height: 8px vertical-align: top overflow: hidden border-top: 1px solid rgb(226, 12, 7) border-top-left-radius: 0px border-bottom-width: 0px border-left: 1px solid rgb(226, 12, 7) border-bottom-left-radius: 0px box-sizing: border-box " svg viewbox=" 0 0 1 1" style=" float:left line-height:0 width:0 vertical-align:top " /svg /section /section /section /section section style=" display: inline-block vertical-align: middle width: auto flex: 100 100 0% align-self: center height: auto background-image: linear-gradient(90deg, rgb(226, 12, 7) 0%, rgba(226, 12, 7, 0) 100%) line-height: 0 letter-spacing: 0px box-sizing: border-box " section style=" position: static box-sizing: border-box " powered-by=" xiumi.us" section class=" group-empty" style=" display: inline-block width: 10px height: 1px vertical-align: top overflow: hidden box-sizing: border-box " svg viewbox=" 0 0 1 1" style=" float:left line-height:0 width:0 vertical-align:top " /svg /section /section /section /section /section /section /section /section p style=" text-align: center " img style=" max-width:100% max-height:100% " src=" https://img1.17img.cn/17img/images/202009/uepic/f8626de0-4b39-4f96-bace-4f3f110bd3a8.jpg" title=" 图片4.jpg" alt=" 图片4.jpg" / /p p style=" text-align: justify text-indent: 2em " 2019年坐标测量机的出口额为2.2亿元,较2018年降低了25%。2020上半年,坐标测量机的出口额为1.0亿元,较2019年同期降低了17%。可以看出,2018年1月至2020年6月,坐标测量机的进口额和出口额均呈现逐渐降低的趋势。从图1和图4可以看到,2018年的12月,不论是进口额还是出口额,均出现了“井喷式”增长现象;2019年的12月,进口额和出口额也较前几个月有所升高。 /p p style=" text-align: center " img style=" max-width:100% max-height:100% " src=" https://img1.17img.cn/17img/images/202009/uepic/bcb029e9-2489-4388-980c-6bfdc61adc8f.jpg" title=" 图片5.jpg" alt=" 图片5.jpg" / /p p style=" text-align: justify text-indent: 2em " 2018年1月至2020年6月,德国、日本、中国台湾、越南、韩国、印度、马来西亚、泰国、中国香港、新加坡等是我国坐标测量机的主要出口地区。其中,德国、日本、韩国、新加坡等不仅是我国坐标测量机的主要出口地区,也是我国坐标测量机的主要进口地区。 /p p style=" text-align: center " img style=" max-width:100% max-height:100% " src=" https://img1.17img.cn/17img/images/202009/uepic/675fd6f3-782a-4952-b3f4-286ac80f309b.jpg" title=" 图片6.jpg" alt=" 图片6.jpg" / /p p style=" text-align: justify text-indent: 2em " 上海、山东、广东、江苏、陕西、北京、浙江、广西、辽宁、江西是坐标测量机出口额排名前十的发货人注册地。其中,上海市的进口额和出口额均遥遥领先于其它省份。2018年1月至2020年6月,上海市的进口额和出口额分别占比26%和42%。 /p p style=" text-align: justify text-indent: 2em " br/ /p section style=" box-sizing: border-box text-align: justify " section style=" text-align: center margin: 10px 0% position: static box-sizing: border-box " powered-by=" xiumi.us" section style=" display: inline-block width: auto vertical-align: top min-width: 10% max-width: 100% height: auto line-height: 0 letter-spacing: 0px box-sizing: border-box " section style=" position: static box-sizing: border-box " powered-by=" xiumi.us" section style=" display: flex flex-flow: row nowrap position: static box-sizing: border-box " section style=" display: inline-block vertical-align: middle width: auto flex: 100 100 0% align-self: center height: auto line-height: 0 letter-spacing: 0px background-image: linear-gradient(270deg, rgb(226, 12, 7) 0%, rgba(226, 12, 7, 0) 100%) margin: 0px box-sizing: border-box " section style=" position: static box-sizing: border-box " powered-by=" xiumi.us" section class=" group-empty" style=" display: inline-block width: 10px height: 1px vertical-align: top overflow: hidden box-sizing: border-box " svg viewbox=" 0 0 1 1" style=" float:left line-height:0 width:0 vertical-align:top " /svg /section /section /section section style=" display: inline-block vertical-align: middle width: auto flex: 0 0 0% height: auto align-self: center line-height: 0 letter-spacing: 0px margin: 0px padding: 0px 1px box-sizing: border-box " section style=" position: static transform: rotateZ(45deg) -webkit-transform: rotateZ(45deg) -moz-transform: rotateZ(45deg) -o-transform: rotateZ(45deg) box-sizing: border-box " powered-by=" xiumi.us" section style=" position: static box-sizing: border-box " section class=" group-empty" style=" display: inline-block width: 8px height: 8px vertical-align: top overflow: hidden border-top: 1px solid rgb(226, 12, 7) border-top-left-radius: 0px border-bottom-width: 0px border-left: 1px solid rgb(226, 12, 7) border-bottom-left-radius: 0px box-sizing: border-box " svg viewbox=" 0 0 1 1" style=" float:left line-height:0 width:0 vertical-align:top " /svg /section /section /section /section section style=" display: inline-block vertical-align: middle width: auto flex: 100 100 0% align-self: center height: auto background-image: linear-gradient(90deg, rgb(226, 12, 7) 0%, rgba(226, 12, 7, 0) 100%) line-height: 0 letter-spacing: 0px box-sizing: border-box " section style=" position: static box-sizing: border-box " powered-by=" xiumi.us" section class=" group-empty" style=" display: inline-block width: 10px height: 1px vertical-align: top overflow: hidden box-sizing: border-box " svg viewbox=" 0 0 1 1" style=" float:left line-height:0 width:0 vertical-align:top " /svg /section /section /section /section /section section style=" display: inline-block width: 100% vertical-align: top line-height: 1.5 letter-spacing: 0px box-sizing: border-box " powered-by=" xiumi.us" section style=" position: static box-sizing: border-box " powered-by=" xiumi.us" section style=" display: flex flex-flow: row nowrap position: static box-sizing: border-box " section style=" display: inline-block vertical-align: middle width: auto flex: 0 0 0% height: auto line-height: 0 letter-spacing: 0px align-self: center margin: 0px 0px 0px 30px box-sizing: border-box " section style=" position: static box-sizing: border-box " powered-by=" xiumi.us" section class=" group-empty" style=" display: inline-block width: 8px height: 8px vertical-align: top overflow: hidden background-position: 50% 50% background-repeat: no-repeat background-size: contain background-attachment: scroll background-image: url(" box-sizing:=" " svg viewbox=" 0 0 1 1" style=" float:left line-height:0 width:0 vertical-align:top " /svg /section /section /section section style=" display: inline-block vertical-align: middle width: auto flex: 100 100 0% height: auto align-self: center box-sizing: border-box " section style=" text-align: justify font-size: 17px color: rgb(221, 49, 49) letter-spacing: 1.8px line-height: 1.5 padding: 0px 8px box-sizing: border-box " powered-by=" xiumi.us" p style=" text-align: center white-space: normal margin-top: 0px margin-bottom: 0px padding: 0px box-sizing: border-box " 进口VS出口 strong style=" letter-spacing: 1.8px box-sizing: border-box " /strong /p /section /section section style=" display: inline-block vertical-align: middle width: auto flex: 0 0 0% height: auto line-height: 0 letter-spacing: 0px align-self: center margin: 0px 30px 0px 0px box-sizing: border-box " section style=" position: static box-sizing: border-box " powered-by=" xiumi.us" section class=" group-empty" style=" display: inline-block width: 8px height: 8px vertical-align: top overflow: hidden background-position: 50% 50% background-repeat: no-repeat background-size: contain background-attachment: scroll background-image: url(" box-sizing:=" " svg viewbox=" 0 0 1 1" style=" float:left line-height:0 width:0 vertical-align:top " /svg /section /section /section /section /section /section section style=" position: static box-sizing: border-box " powered-by=" xiumi.us" section style=" display: flex flex-flow: row nowrap transform: translate3d(0px, 0px, 1px) rotateX(180deg) -webkit-transform: translate3d(0px, 0px, 1px) rotateX(180deg) -moz-transform: translate3d(0px, 0px, 1px) rotateX(180deg) -o-transform: translate3d(0px, 0px, 1px) rotateX(180deg) position: static box-sizing: border-box " section style=" display: inline-block vertical-align: middle width: auto flex: 100 100 0% align-self: center height: auto line-height: 0 letter-spacing: 0px background-image: linear-gradient(270deg, rgb(226, 12, 7) 0%, rgba(226, 12, 7, 0) 100%) margin: 0px box-sizing: border-box " section style=" position: static box-sizing: border-box " powered-by=" xiumi.us" section class=" group-empty" style=" display: inline-block width: 10px height: 1px vertical-align: top overflow: hidden box-sizing: border-box " svg viewbox=" 0 0 1 1" style=" float:left line-height:0 width:0 vertical-align:top " /svg /section /section /section section style=" display: inline-block vertical-align: middle width: auto flex: 0 0 0% height: auto align-self: center line-height: 0 letter-spacing: 0px margin: 0px padding: 0px 1px box-sizing: border-box " section style=" position: static transform: rotateZ(45deg) -webkit-transform: rotateZ(45deg) -moz-transform: rotateZ(45deg) -o-transform: rotateZ(45deg) box-sizing: border-box " powered-by=" xiumi.us" section style=" position: static box-sizing: border-box " section class=" group-empty" style=" display: inline-block width: 8px height: 8px vertical-align: top overflow: hidden border-top: 1px solid rgb(226, 12, 7) border-top-left-radius: 0px border-bottom-width: 0px border-left: 1px solid rgb(226, 12, 7) border-bottom-left-radius: 0px box-sizing: border-box " svg viewbox=" 0 0 1 1" style=" float:left line-height:0 width:0 vertical-align:top " /svg /section /section /section /section section style=" display: inline-block vertical-align: middle width: auto flex: 100 100 0% align-self: center height: auto background-image: linear-gradient(90deg, rgb(226, 12, 7) 0%, rgba(226, 12, 7, 0) 100%) line-height: 0 letter-spacing: 0px box-sizing: border-box " section style=" position: static box-sizing: border-box " powered-by=" xiumi.us" section class=" group-empty" style=" display: inline-block width: 10px height: 1px vertical-align: top overflow: hidden box-sizing: border-box " svg viewbox=" 0 0 1 1" style=" float:left line-height:0 width:0 vertical-align:top " /svg /section /section /section /section /section /section /section /section p style=" text-align: center " img style=" max-width:100% max-height:100% " src=" https://img1.17img.cn/17img/images/202009/uepic/4812f0a9-a41b-47eb-83e1-309c94ea176e.jpg" title=" 图片7.jpg" alt=" 图片7.jpg" / /p p style=" text-align: center " img style=" max-width:100% max-height:100% " src=" https://img1.17img.cn/17img/images/202009/uepic/584d8f8a-eb54-43ef-b93e-7306adc24d39.jpg" title=" 图片8.jpg" alt=" 图片8.jpg" / /p p style=" text-align: justify text-indent: 2em " 从图7和图8可以明显看出我国坐标测量机的进口和出口市场的悬殊差距:2018年、2019年、2020上半年,坐标测量机的进口额分别是出口额的3.8倍、3.8倍、3.0倍;坐标测量机的进口均价分别是出口均价的73.8倍、16.5倍、3.2倍。 /p p style=" text-align: justify text-indent: 2em " 随着测量技术的高速发展,制造业对于坐标测量机的依赖程度不断提高。它作为一个比较新型的精密设备,包括了光学、计算机和软件开发等多个技术应用,是现代制造业不可缺少的重要仪器。目前,我国坐标测量机的主要生产厂商有航空工业精密所、西安爱德华、青岛雷顿等,国外比较著名的坐标测量机生产厂家有瑞典海克斯康、德国蔡司、德国温泽以及日本三丰等。 /p p style=" text-align: justify text-indent: 2em " 不可否认,国内精密计量型坐标测量产品与国外产品还存在差距。国内仪器厂商要在竞争激烈的坐标测量机市场中站稳脚跟,势必要认清态势,不断研发创新,从而建立起自己的核心竞争力。 /p p style=" text-align: justify text-indent: 2em " br/ /p




























 我要推广仪器
我要推广仪器
 下载APP
下载APP