实验室的紫外可见吸收光谱配有四联池附件,但从来没有人用,我也没学过相关方法,至今不知道四联池附件是干什么用的。哪位能给我讲一讲四联池附件是干什么用的?最好能提供一些资料或学习线索。多谢!
1、应变片压力传感器原理与应用 力学传感器的种类繁多,如电阻应变片压力传感器、半导体应变片压力传感器、压阻式压力传感器、电感式压力传感器、电容式压力传感器、谐振式压力传感器及电容式加速度传感器等。但应用最为广泛的是压阻式压力传感器,它具有极低的价格和较高的精度以及较好的线性特性。下面我们主要介绍这类传感器。 在了解压阻式力传感器时,我们首先认识一下电阻应变片这种元件。电阻应变片是一种将被测件上的应变变化转换成为一种电信号的敏感器件。它是压阻式应变传感器的主要组成部分之一。电阻应变片应用最多的是金属电阻应变片和半导体应变片两种。金属电阻应变片又有丝状应变片和金属箔状应变片两种。通常是将应变片通过特殊的粘和剂紧密的粘合在产生力学应变基体上,当基体受力发生应力变化时,电阻应变片也一起产生形变,使应变片的阻值发生改变,从而使加在电阻上的电压发生变化。这种应变片在受力时产生的阻值变化通常较小,一般这种应变片都组成应变电桥,并通过后续的仪表放大器进行放大,再传输给处理电路(通常是A/D转换和CPU)显示或执行机构。金属电阻应变片的内部结构 如图1所示,是电阻应变片的结构示意图,它由基体材料、金属应变丝或应变箔、绝缘保护片和引出线等部分组成。根据不同的用途,电阻应变片的阻值可以由设计者设计,但电阻的取值范围应注意:阻值太小,所需的驱动电流太大,同时应变片的发热致使本身的温度过高,不同的环境中使用,使应变片的阻值变化太大,输出零点漂移明显,调零电路过于复杂。而电阻太大,阻抗太高,抗外界的电磁干扰能力较差。一般均为几十欧至几十千欧左右。 电阻应变片的工作原理 金属电阻应变片的工作原理是吸附在基体材料上应变电阻随机械形变而产生阻值变化的现象,俗称为电阻应变效应。金属导体的电阻值可用下式表示:式中:ρ——金属导体的电阻率(Ω·cm2/m) S——导体的截面积(cm2) L——导体的长度(m) 我们以金属丝应变电阻为例,当金属丝受外力作用时,其长度和截面积都会发生变化,从上式中可很容易看出,其电阻值即会发生改变,假如金属丝受外力作用而伸长时,其长度增加,而截面积减少,电阻值便会增大。当金属丝受外力作用而压缩时,长度减小而截面增加,电阻值则会减小。只要测出加在电阻的变化(通常是测量电阻两端的电压),即可获得应变金属丝的应变情
电阻应变测量原理,是以电阻应变片作为传感元件,将其牢固地粘贴在构件的测点上,构件受力后由于测点发生应变,应变片也随之变形而使应变片的电阻发生变化,再由专用仪器测得应变片的电阻变化大小,并转换为测点的应变值。 根据不同的用途,电阻应变片的阻值可以由设计者设计,但电微型压力传感器阻的取值范围应注意:阻值太小,所需的驱动电流太大,同时应变片的发热致使本身的温度过高,不同的环境中使用,使应变片的阻值变化太大,输出零点漂移明显,调零电路过于复杂。而电阻太大,阻抗太高,抗外界的电磁干扰能力较差。一般均为几十欧至几十千欧左右。金属电阻应变片的工作原理是吸附在基体材料上应变电阻随机械形变而产生阻值变化的现象,俗称为电阻应变效应。
浅谈ARD3电动机保护器设计原理 安科瑞 蔡昀羲摘 要:本文着重介绍ARD3电动机保护器的具体设计方法,给出硬件原理图和软件流程图。文章按照产品的各硬件功能模块进行展开说明,介绍硬件功能模块时,对硬件功能模块原理图进行详细分析,结合各种实际应用的情况说明此处硬件是怎样设计的,为什么这样设计以及这样设计的优缺点。通常电动机保护器工作的条件比较恶劣,为使产品性能方面更加稳定可靠,需要使用一些抗干扰措施,文中介绍的这些抗干扰措施在实际使用中被证明是成功的。关键词:电动机保护器;ARD3;保护功能;ModBus0 引言 随着电子技术的发展,电动机保护器正向基于现场总线的智能型方向发展。我公司设计的ARD3电动机保护器立足于国内先进水平,是具有智能保护和可通信功能的电动机保护器。产品系列电流范围齐全,产品系列额定电流范围1.6~800A;可测量的电流范围宽,可以达到10倍电机额定电流;采用先进的软件算法和可靠的硬件设计,对电动机的过载、断相、三相不平衡、堵转、阻塞、过压、欠压等故障进行有效判断和可靠保护,过载保护采用计算分析当前电动机的热容量的方法,根据热容情况判断电动机的过载状态,此种方法可以最大发挥电动机的过载能力;配有可编程开关量输入、继电器输出,用于实现远程主站对电动机运行状态的遥信监视和直接起动、自耦降压、星-三角等起动方式;带有标准RS-485接口ModBus通讯协议实现计算机联网。1 硬件设计 ARD3电动机保护器用H8/3687FP单片机实现电动机的保护功能。在硬件方面主要由三相电流信号采样、漏电流采样、电压信号采样、键盘接口、显示部分、控制输出、报警输出、通信接口等几部分构成,下面分别对其中的关键部分作简要介绍。1.1 信号采集单元 ARD3电动机保护器采用交流采样算法计算被测信号。采样方式是按一定周期(称为采样周期)连续实时采样被测信号一个完整的波形(对于正弦波只需采样半个周期即可),然后将采样得到的离散信号进行真有效值运算,从而得到被测信号的真有效值,这样就避免了被测信号波形畸变对采样值的影响。 信号采集单元的功能取样、整流、放大互感器二次测的输出信号,将这些信号转换为单片机可处理的信号。ARD3电动机保护器中处理三相电流信号、剩余电流信号、电压信号的信号采集放大电路原理都相同,现以一路电流信号采集放大电路为例说明电路工作原理。 信号采集放大电路如图1所示。在图中二极管A1、A7是双向二极管,对后级电路起到过压保护作用。当输入的信号在正常范围内,A1、A7不起作用,当输入信号超出正常范围(或有脉冲干扰信号出现)时,A1、A7导通,防止超出后级电路端口范围的信号进入后级电路,破坏后级A/D电路。CR1为取样电阻,将从CT1输出的电流信号转变为电压信号。LM324和CR4,CR7,CR10,CR13组成同相放大电路将电压信号放大后输入A/D转换电路。 图1中LM324采用双电源供电,这样可以保证LM324输出电压达到5V充分利用A/D转换提高显示精度。图1中通过运放将输入信号进行分档处理,小信号从P1.0输出大信号从P1.1输出。这样处理是因为:电动机保护器要处理的电流范围很宽(要从电动机1倍额定电流到10倍额定电流),分档处理可以提高测量精度。1.2 I/O单元 开关量输入处理电路如图2所示。电路开关量由IN1~IN7输入,通过光藕后产生IS1~IS7,并行信号IS1~IS7输入到74HC165,通过74HC165将并行信号转换为串行信号传送给CPU。电阻R11~R18起到限流作用保护光耦中的二极管不被损坏。RS1~RS8是上拉电阻与电容CS~CS8配合使用既可以稳定光耦输出电平又可以在上电时对光耦起到保护作用。Fig.2 Switching input circuit 继电器控制电路如图3所示。JDQ1~JDQ4与CPU连接,三极管QJ11~QJ14的供电电压是+5V,三极管QJ1~QJ4的供电电压是+24V。现以QJ11,QJ1这路控制电路来说明电路工作原理,当CPU输出高电平时三极管QJ11不导通,OUT11不会输出电流光藕不会导通,JT1也输出高电平,QJ1不会导通继电器不会动作。当CPU输出低电平时三极管QJ11导通,OUT1输出高电平使光耦导通, JT1变为低电平,三极管QJ1导通OUT1输出低电平使继电器发生动作。图3中二极管DJ1~DJ4作为继电器续流二极管。Fig.3 Relay control circuit 控制输出部分可采用机电式继电器或固体继电器。前者价格便宜,市场产品丰富,驱动线路也比较简单,但可靠性和使用寿命有限,且在触点动作时会产生“火花”,严重时可影响系统的正常工作。因此,在PCB板布局时应将继电器尽量远离单片机并靠近仪表的输出端口。另外,在继电器线圈两端应并联续流二极管,否则在继电器线圈断电瞬间会产生较高的感应电压,从而破坏电路。固态继电器具有寿命长、性能稳定,无火花等特点,本产品中考虑到产品的可靠性要求采用固态继电器。1.3 通讯单元 通讯电路如图4所示。通讯电路实现将CPU串口输出电平转换到RS485电平。本电路的巧妙之处在于数据收发直接由硬件来控制,不用CPU参与控制,这样可以节省CPU资源简化程序设计。Fig.4 Communications circuit1.4 CPU单元 CPU单元是电机保护器的核心单元。信号采集,各种报警处理,通信功能,显示功能……都是由它来完成的。本产品采用的CPU芯片是瑞萨公司的H8/3687芯片,该芯片功能如下:62条基本指令; RTC(片上实时时钟,可作为自由运算计数器使用),SCI(异步或者时钟同步串行通信接口)2路,1路IIC接口,8路10位A/D,8位定时器2个(Timer B1,TimerV),16位定时器1个(TimerZ),看门狗定时器,14位PWM,45个I/O引脚(H8/3687N有43个I/O引脚),包括8个可直接驱动LED的大电流引脚(IOL=20mA,@VOL=1.5V),片上复位电源POR电路,片上低电压检测电路(LVD)。该芯片有两种封装形式:LQFP-64(10mm×10mm)FP-64(14mm×14mm) 。CPU单元电路如图5所示。 因为A/D功能,IIC功能,RTC,定时器,看门狗等功能都已经集成到芯片内部,所以CPU单元的外围电路十分简洁,各引脚只需外接增加端口驱动能力的上拉电阻和稳定信号的滤波电容即可。2 软件设计 系统软件要完成三相电流、1路剩余电流、三路电压A/D,各种保护量计算,保护功能判断处理,显示电压、电流,故障记录,按键处理,通讯,变送等功能。只有合理安排程序流程来完成这些功能,保护器才能可靠工作。程序流程图如图6所示:3 抗干扰措施 电动机保护器作为保护电动机装置要具有很强的抗干扰性。在本产品软硬件设计过程中采取如下措施提高产品的抗干扰性:1硬件方面:电源部分加EMC滤波器,高频变压器次级与初级加高压电容,输出部分加滤波电路;信号采集部分增加滤波电路;在作信号处理的各芯片输入口处加端口保护电路;在各芯片电源输入处加去藕电容;继电器两端并联续流二极管,加光耦与CPU端口隔离;不使用的CPU端口定义为输出状态;PCB板布局时模拟部分与数字部分作分区处理,模拟信号在模拟区域内布线,数字信号数字区域内布线,二者不进入彼此区域内;布线时尽量加粗电源线与地线,信号线走线时走145º线,不走直角线;使用CPU内部看门狗监控程序运行。2软件方面:各路信号采集都使用软件滤波,增加采样值的准确性。通过采取一系列的措施,产品的抗干扰性能大幅提高,本产品一次性顺利通过3C安全认证型式试验。4 结论 ARD3电动机保护器采用先进的设计方案,集测量、保护、控制、通讯于一身,产品性能安全可靠,可以对电动机实施可靠有效的保护。ARD3电动机保护器在实际使用中完全可以替热继电器、温度继电器等传统的电动机保护产品,替代各种指针式电量表、信号灯、电量变送器等常规元件,简化电动机控制电路,减少柜内电缆连接及现场施工量。
[align=left]电动缸是用各种电动机(如伺服电动机、步进电动机、电动机)带动各种螺杆(如滑动螺杆、滚珠螺杆)旋转,通过螺母转化为直线运动,并推动滑台沿导轨(如滑动导轨、滚珠导轨、高刚性直线导轨)像气缸那样作往复直线运动。为适应不同的要求,电动缸已有多种品种规格,也有不同的名称,如:电动滑台、直线滑台、工业机械手臂等。[/align][align=left] [/align][align=left]电动缸的特点:[/align][align=left]1、闭环伺服控制:控制精度达到0.01mm;精密控制推力,增加压力传感器,控制精度可达1%;很容易与PLC等控制系统连接,实现高精密运动控制。噪音低,节能,干净,高刚性,抗冲击力,超长寿命,操作维护简单。此外,电动缸可以在恶劣环境下无故障,防护等级可以达到IP66。[/align][align=left] [/align][align=left]2、低成本维护,电动缸在复杂的环境下工作只需要定期的注脂润滑,并无易损件需要维护更换,将比液压系统和气压系统减少了大量的售后服务成本。是液压缸和气缸的最佳替代品,并且实现环境更环保,更节能,更干净的优点。[/align][align=left]选购米思米[b][url=https://www.misumi.com.cn/vona2/maker/misumi/mech/M0500000000/]电动缸[/url][/b] https://www.misumi.com.cn/vona2/maker/misumi/mech/M0500000000/[/align][align=left]3、配置灵活性,可以提供非常灵活的安装配置,全系列的安装组件,安装前法兰,后法兰,侧面法兰,尾部铰接,耳轴安装,导向模块等;可以与伺服电机直线安装,或者平行安装;可以增加各式附件:限位开关,行星减速机,预紧螺母等;驱动可以选择交流制动电机,直流电机,步进电机,伺服电机。[/align][align=left] [/align][align=left]电动缸的广泛应用:[/align][align=left]1、娱乐行业:机械人手臂及关节,动感座椅等;[/align][align=left]2、军工行业:模拟飞行器,模拟仿真等;[/align][align=left]3、汽车行业:压装机,测试仪器等;[/align][align=left]4、工业行业:食品机械,陶瓷机械,焊接机械,升降平台等;[/align][align=left]5、医疗器械。浏览更多机械设备知识,访问[url=https://www.misumi.com.cn/]米思米[/url]官网https://www.misumi.com.cn/[/align]
摘 要:本文着重介绍ARD3电动机保护器的具体设计方法,给出硬件原理图和软件流程图。文章按照产品的各硬件功能模块进行展开说明,介绍硬件功能模块时,对硬件功能模块原理图进行详细分析,结合各种实际应用的情况说明此处硬件是怎样设计的,为什么这样设计以及这样设计的优缺点。通常电动机保护器工作的条件比较恶劣,为使产品性能方面更加稳定可靠,需要使用一些抗干扰措施,文中介绍的这些抗干扰措施在实际使用中被证明是成功的。关键词:电动机保护器;ARD3;保护功能;ModBusAbstract: This paper highlights idiographic design methods of the ARD3 motor protector, gives hardware and software flow char diagram. According to hardware modules, the article starts description of the hardware modules schematic for detailed analysis, the combination of practical application note here is how to design the hardware, why this design and the advantages and disadvantages of this design. The conditions that motor protector usually works are poor, for the product more stable and reliable performance, needing to use some anti-jamming measures, described in the text of these anti-jamming measures in practical use has proved to be successful.Key words: motor protector;ARD3;protect function;ModBus0 引言 随着电子技术的发展,电动机保护器正向基于现场总线的智能型方向发展。我公司设计的ARD3电动机保护器立足于国内先进水平,是具有智能保护和可通信功能的电动机保护器。产品系列电流范围齐全,产品系列额定电流范围1.6~800A;可测量的电流范围宽,可以达到10倍电机额定电流;采用先进的软件算法和可靠的硬件设计,对电动机的过载、断相、三相不平衡、堵转、阻塞、过压、欠压等故障进行有效判断和可靠保护,过载保护采用计算分析当前电动机的热容量的方法,根据热容情况判断电动机的过载状态,此种方法可以最大发挥电动机的过载能力;配有可编程开关量输入、继电器输出,用于实现远程主站对电动机运行状态的遥信监视和直接起动、自耦降压、星-三角等起动方式;带有标准RS-485接口ModBus通讯协议实现计算机联网。1 硬件设计 ARD3电动机保护器用H8/3687FP单片机实现电动机的保护功能。在硬件方面主要由三相电流信号采样、漏电流采样、电压信号采样、键盘接口、显示部分、控制输出、报警输出、通信接口等几部分构成,下面分别对其中的关键部分作简要介绍。1.1 信号采集单元 ARD3电动机保护器采用交流采样算法计算被测信号。采样方式是按一定周期(称为采样周期)连续实时采样被测信号一个完整的波形(对于正弦波只需采样半个周期即可),然后将采样得到的离散信号进行真有效值运算,从而得到被测信号的真有效值,这样就避免了被测信号波形畸变对采样值的影响。 信号采集单元的功能取样、整流、放大互感器二次测的输出信号,将这些信号转换为单片机可处理的信号。ARD3电动机保护器中处理三相电流信号、剩余电流信号、电压信号的信号采集放大电路原理都相同,现以一路电流信号采集放大电路为例说明电路工作原理。 信号采集放大电路如图1所示。在图中二极管A1、A7是双向二极管,对后级电路起到过压保护作用。当输入的信号在正常范围内,A1、A7不起作用,当输入信号超出正常范围(或有脉冲干扰信号出现)时,A1、A7导通,防止超出后级电路端口范围的信号进入后级电路,破坏后级A/D电路。CR1为取样电阻,将从CT1输出的电流信号转变为电压信号。LM324和CR4,CR7,CR10,CR13组成同相放大电路将电压信号放大后输入A/D转换电路。 图1中LM324采用双电源供电,这样可以保证LM324输出电压达到5V充分利用A/D转换提高显示精度。图1中通过运放将输入信号进行分档处理,小信号从P1.0输出大信号从P1.1输出。这样处理是因为:电动机保护器要处理的电流范围很宽(要从电动机1倍额定电流到10倍额定电流),分档处理可以提高测量精度。1.2 I/O单元 开关量输入处理电路如图2所示。电路开关量由IN1~IN7输入,通过光藕后产生IS1~IS7,并行信号IS1~IS7输入到74HC165,通过74HC165将并行信号转换为串行信号传送给CPU。电阻R11~R18起到限流作用保护光耦中的二极管不被损坏。RS1~RS8是上拉电阻与电容CS~CS8配合使用既可以稳定光耦输出电平又可以在上电时对光耦起到保护作用。 继电器控制电路如图3所示。JDQ1~JDQ4与CPU连接,三极管QJ11~QJ14的供电电压是+5V,三极管QJ1~QJ4的供电电压是+24V。现以QJ11,QJ1这路控制电路来说明电路工作原理,当CPU输出高电平时三极管QJ11不导通,OUT11不会输出电流光藕不会导通,JT1也输出高电平,QJ1不会导通继电器不会动作。当CPU输出低电平时三极管QJ11导通,OUT1输出高电平使光耦导通, JT1变为低电平,三极管QJ1导通OUT1输出低电平使继电器发生动作。图3中二极管DJ1~DJ4作为继电器续流二极管。 控制输出部分可采用机电式继电器或固体继电器。前者价格便宜,市场产品丰富,驱动线路也比较简单,但可靠性和使用寿命有限,且在触点动作时会产生“火花”,严重时可影响系统的正常工作。因此,在PCB板布局时应将继电器尽量远离单片机并靠近仪表的输出端口。另外,在继电器线圈两端应并联续流二极管,否则在继电器线圈断电瞬间会产生较高的感应电压,从而破坏电路。固态继电器具有寿命长、性能稳定,无火花等特点,本产品中考虑到产品的可靠性要求采用固态继电器。1.3 通讯单元 通讯电路如图4所示。通讯电路实现将CPU串口输出电平转换到RS485电平。本电路的巧妙之处在于数据收发直接由硬件来控制,不用CPU参与控制,这样可以节省CPU资源简化程序设计。1.4 CPU单元 CPU单元是电机保护器的核心单元。信号采集,各种报警处理,通信功能,显示功能……都是由它来完成的。本产品采用的CPU芯片是瑞萨公司的H8/3687芯片,该芯片功能如下:62条基本指令; RTC(片上实时时钟,可作为自由运算计数器使用),SCI(异步或者时钟同步串行通信接口)2路,1路IIC接口,8路10位A/D,8位定时器2个(Timer B1,TimerV),16位定时器1个(TimerZ),看门狗定时器,14位PWM,45个I/O引脚(H8/3687N有43个I/O引脚),包括8个可直接驱动LED的大电流引脚(IOL=20mA,@VOL=1.5V),片上复位电源POR电路,片上低电压检测电路(LVD)。该芯片有两种封装形式:LQFP-64(10mm×10mm)FP-64(14mm×14mm) 。CPU单元电路如图5所示。 因为A/D功能,IIC功能,RTC,定时器,看门狗等功能都已经集成到芯片内部,所以CPU单元的外围电路十分简洁,各引脚只需外接增加端口驱动能力的上拉电阻和稳定信号的滤波电容即可。2 软件设计 系统软件要完成三相电流、1路剩余电流、三路电压A/D,各种保护量计算,保护功能判断处理,显示电压、电流,故障记录,按键处理,通讯,变送等功能。只有合理安排程序流程来完成这些功能,保护器才能可靠工作。程序流程图如图6所示:3 抗干扰措施 电动机保护器作为保护电动机装置要具有很强的抗干扰性。在本产品软硬件设计过程中采取如下措施提高产品的抗干扰性:1硬件方面:电源部分加EMC滤波器,高频变压器次级与初级加高压电容,输出部分加滤波电路;信号采集部分增加滤波电路;在作信号处理的各芯片输入口处加端口保护电路;在各芯片电源输入处加去藕电容;继电器两端并联续流二极管,加光耦与CPU端口隔离;不使用的CPU端口定义为输出状态;PCB板布局时模拟部分与数字部分作分区处理,模拟信号在模拟区域内布线,数字信号数字区域内布线,二者不进入彼此区域内;布线时尽量加粗电源线与地线,信号线走线时走145º线,不走直角线;使用CPU内部看门狗监控程序运行。2软件方面:各路信号采集都使用软件滤波,增加采样值的准确性。通过采取一系列的措施,产品的抗干扰性能大幅提高,本产品一次性顺利通过3C安全认证型式试验。4 结论 ARD3电动机保护器采用先进的设计方案,集测量、保护、控制、通讯于一身,产品性能安全可靠,可以对电动机实施可靠有效的保护。ARD3电动机保护器在实际使用中完全可以替热继电器、温度继电器等传统的电动机保护产品,替代各种指针式电量表
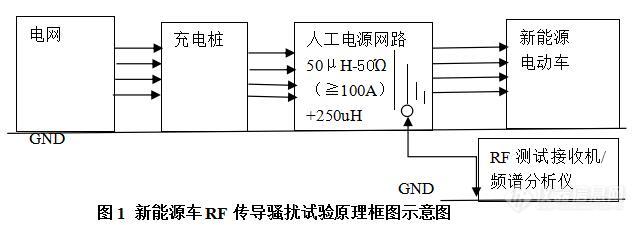
文/孙成明 许展川 李 琴 (华测检测 宁波汽车电子EMC实验室)[b]1 概述[/b]新能源电动车充电时经充电桩与电网连接,车辆对充电桩及充电桩对电网都存在RF传导骚扰,因此,探讨新能源电动车RF传导骚扰试验方法和限值是必要的。新能源电动车及其充电桩RF传导骚扰试验必须使用三相四线大电流人工电源网络。本文给出了大电流人工电源网络的原理和主要参数,可供开发大电流人工电源网络研制工程师参考,亦可供华测检测汽车事业部业务工程师和汽车电子EMC实验室工程师参考。[b]2 新能源电动车和充电桩RF传导骚扰试验[/b]2.1试验系统基本原理2.2.1新能源车RF传导骚扰试验方法推荐新能源电动车RF传导骚扰试验基本原理示意框图,见图1所示[img=,638,225]https://ng1.17img.cn/bbsfiles/images/2018/10/201810241657132889_129_3051334_3.jpg!w638x225.jpg[/img] 图1中,新能源电动车对充电桩的RF骚扰,必须经三相四线大电流人工电源网络,由RF测试接收机逐线选择来测量。2.2.2新能源车充电桩RF传导骚扰试验方法推荐新能源车充电桩RF传导骚扰试验基本原理示意框图,见图2所示。[img=,635,230]https://ng1.17img.cn/bbsfiles/images/2018/10/201810241657538550_4626_3051334_3.jpg!w635x230.jpg[/img][img=,191,2]file:///C:\Users\ght\AppData\Local\Temp\ksohtml\wpsD14.tmp.png[/img]图2中,对新能源电动车充电时,或充电桩不充电时,充电桩对电网的RF骚扰,也必须经三相四线大电流人工电源网络,由RF测试接收机逐线选择来测量。2.3 新能源电动车RF传导骚扰限值2.3.1充电桩对电网的RF传导骚扰限值充电桩接入电网,当充电桩未对电动车充电时,其对电网(AC)的RF骚扰限值,应参照/满足IEC61000-6-3要求,见表1所示,[img=,635,218]https://ng1.17img.cn/bbsfiles/images/2018/10/201810241658157121_9168_3051334_3.jpg!w635x218.jpg[/img]当充电桩对电动车充电时,其对电网(AC)的RF骚扰限值,可结合新能源电动车和充电桩及电网实际,提出/制定充电桩的RF骚扰限值要求。GB/T 18387.3-2001:(GB 9254,GB 6113.1,.3)电动车辆传导充电系统[img=,526,372]https://ng1.17img.cn/bbsfiles/images/2018/10/201810241658293860_2879_3051334_3.jpg!w526x372.jpg[/img]信号-控制线[img=,635,450]https://ng1.17img.cn/bbsfiles/images/2018/10/201810241658412186_7479_3051334_3.jpg!w635x450.jpg[/img]2.3.2新能源电动车对充电桩的RF传导骚扰限值IEC61000-6-3对直流电网骚扰限值要求,见表2所示,[img=,642,146]https://ng1.17img.cn/bbsfiles/images/2018/10/201810241658558320_3048_3051334_3.jpg!w642x146.jpg[/img]充电桩对电动车充电时,由于DC电压高,电流大,电动车对充电桩的RF骚扰限值,应结合新能源电动车和充电桩实际,可参考表2要求制定。[b]3 大电流人工电源网络[/b]3.1 必要性、重要性GB/T 13837推荐的人工电源网络(单相),已不适用于三相四线电网要求,必须开发新型三相四线大电流人工电源网络。由图1和图2看出,测量接收机测量的是RF骚扰信号(微伏量级),应尽可能实现50Ω 阻抗匹配,减小插入损耗(小于2dB),同时,还必须保持四线阻抗特性一致;被测网络是高压大电流设备,必须确保通风散热良好,保持网络四线平衡,隔离度大于25dB。3.2 三相四线大电流人工电源网络基本原理新能源汽车及其充电桩,多采用三相四线(AC/DC)制电路, 推荐三相四线(各线≧100A)50μH-50Ώ +250μH人工电源网络电路原理,见图5所示,[img=,643,400]https://ng1.17img.cn/bbsfiles/images/2018/10/201810241659159831_6894_3051334_3.jpg!w643x400.jpg[/img]图5中,在50μH/50Ω人工电源网络前增加了滤波器(电感250μH),以满足网络隔离度要求。3.3 主要技术参数[img=,649,246]https://ng1.17img.cn/bbsfiles/images/2018/10/201810241659353531_4099_3051334_3.jpg!w649x246.jpg[/img][b]4结束语[/b]新能源电动车是国家重点扶持开发项目。目前,欧盟制定了新能源电动车电磁兼容性规范要求(部分试验项目),而新能源电动车及其充电桩对电网的RF传导骚扰限值和试验方法尚无明确规定。建议有关部门,企业及有关专家,重视和加强新能源电动车电磁兼容性试验研究,尽快制定国家新能源汽车EMC技术标准或企业新能源汽车EMC技术规范,以满足新能源汽车电磁兼容性试验要求。
一.测量系统1. 力值的测量通过测力传感器、放大器和数据处理系统来实现测量,最常用的测力传感器是应变片式传感器。所谓应变片式传感器,就是由应变片、弹性元件和某些附件(补偿元件、防护罩、接线插座、加载件组成),能将某种机械量变成电量输出的器件。 应变片式的拉、压力传感器国内外种类繁多,主要有筒状力传感器、轮辐式力传感器、S双连孔型传感器、十字梁式传感器等类型。从材料力学上得知,在小变形条件下,一个弹性元件某一点的应变ε与弹性元件所受的力成正比,也与弹性的变形成正比。以S型传感器为例,当传感器受到拉力P的作用时,由于弹性元件表面粘贴有应变片,因为弹性元件的应变与外力P的大小成正比例,故此将应变片接入测量电路中,即可通过测出其输出电压,从而测出力的大小。对于传感器,一般采用差动全桥测量,即将所粘贴的应变片组成桥路,R1、R2、R3、R4,实际为阻值相等的4片(或8片)应变片,即R1=R2=R3=R4,当传感器受到外力(拉力或压力)作用时,传感器弹性元件产生应变而使各电阻值发生变化,其变化值分别为△R1△、R2、△R3、△R4,结果原来平衡的电桥,现在不平衡了,桥路就有电压输出,设△E则△E= △R1/R1-△R2/R2+△R3/R3-△R4/R4)U式中U为外电源供给桥路的电压进一步筒化有△E=(△R1/R-△R2/R+△R3/R-△R4/R)U将△Ri/Ri=Kεi代上上式则有 △E=(ε1-ε2+ε3-ε4)简单来说,外力P引起传感器内应变片的变形,导致电桥的不平衡,从而引起传感器输出电压的变化, 我们通过测量输出电压的变化就可以知道力的大小了。一般来说,传感器的输出信号都是非常微弱的,通常只有几个mV,如果我们直接对此信号进行测量,是非常困难的,并且不能满足高精度测量要求。因此必须通过放大器将此微弱信号放大,放大后的信号电压可达10V,此时的信号为模拟信号,这个模拟信号经过多路开关和A/D转换芯片转变为数字信号,然后进行数据处理,至此,力的测量告一段落。2. 变形的测量通过变形测量装置来测量,它是用来测量试样在试验过程中产生的形变。该装置上有两个夹头,经过一系列传动机构与装在测量装置顶部的光电编码器连在一起,当两夹头间的距离发生变化时,带动光电编码器的轴旋转,光电编码器就会有脉冲信号输出。再由单片机对此信号进行处理,就可以得出试样的变形量。3横粱位移的测量其原理同变形测量大致相同,都是通过测量光电编码器的输出脉冲数来获得横梁的位移量。二.驱动系统主要是用于试验机的横梁移动,其工作原理是由伺服系统控制电机,电机经过减速箱等一系列传动机构带动丝杆转动,从而达到控制横梁移动的目的。通过改变电机的转速,可以改变横梁的移动速度。三.控制系统顾名思义,就是控制试验机运作的系统,人们通过操作台可以控制试验机的运作,通过显示屏可以获知试验机的状态及各项试验参数,若该机带有电脑的话,也可以由电脑实现各项功能并进行数据处理分析、试验结果打印。试验机同电脑之间的通信一般都是使用RS232串行通信方式,它通过计算机背后的串口(COM号)进行通信,此技术比较成熟、可靠,使用方便。四.电脑用来采集和分析数据,进入试验界面后,电脑会不断采集各样试验数据,实时画出试验曲线,www.jnsyj.net自动求出各试验参数及输出报表。
浅谈ARD3电动机保护器设计原理 安科瑞 蔡昀羲摘 要:本文着重介绍ARD3电动机保护器的具体设计方法,给出硬件原理图和软件流程图。文章按照产品的各硬件功能模块进行展开说明,介绍硬件功能模块时,对硬件功能模块原理图进行详细分析,结合各种实际应用的情况说明此处硬件是怎样设计的,为什么这样设计以及这样设计的优缺点。通常电动机保护器工作的条件比较恶劣,为使产品性能方面更加稳定可靠,需要使用一些抗干扰措施,文中介绍的这些抗干扰措施在实际使用中被证明是成功的。关键词:电动机保护器;ARD3;保护功能;ModBus0 引言 随着电子技术的发展,电动机保护器正向基于现场总线的智能型方向发展。我公司设计的ARD3电动机保护器立足于国内先进水平,是具有智能保护和可通信功能的电动机保护器。产品系列电流范围齐全,产品系列额定电流范围1.6~800A;可测量的电流范围宽,可以达到10倍电机额定电流;采用先进的软件算法和可靠的硬件设计,对电动机的过载、断相、三相不平衡、堵转、阻塞、过压、欠压等故障进行有效判断和可靠保护,过载保护采用计算分析当前电动机的热容量的方法,根据热容情况判断电动机的过载状态,此种方法可以最大发挥电动机的过载能力;配有可编程开关量输入、继电器输出,用于实现远程主站对电动机运行状态的遥信监视和直接起动、自耦降压、星-三角等起动方式;带有标准RS-485接口ModBus通讯协议实现计算机联网。1 硬件设计 ARD3电动机保护器用H8/3687FP单片机实现电动机的保护功能。在硬件方面主要由三相电流信号采样、漏电流采样、电压信号采样、键盘接口、显示部分、控制输出、报警输出、通信接口等几部分构成,下面分别对其中的关键部分作简要介绍。1.1 信号采集单元 ARD3电动机保护器采用交流采样算法计算被测信号。采样方式是按一定周期(称为采样周期)连续实时采样被测信号一个完整的波形(对于正弦波只需采样半个周期即可),然后将采样得到的离散信号进行真有效值运算,从而得到被测信号的真有效值,这样就避免了被测信号波形畸变对采样值的影响。 信号采集单元的功能取样、整流、放大互感器二次测的输出信号,将这些信号转换为单片机可处理的信号。ARD3电动机保护器中处理三相电流信号、剩余电流信号、电压信号的信号采集放大电路原理都相同,现以一路电流信号采集放大电路为例说明电路工作原理。 http://www.acrel.cn/cn/download/common/upload/2011/02/24/144022tl.jpg图1 信号采集放大电路 信号采集放大电路如图1所示。在图中二极管A1、A7是双向二极管,对后级电路起到过压保护作用。当输入的信号在正常范围内,A1、A7不起作用,当输入信号超出正常范围(或有脉冲干扰信号出现)时,A1、A7导通,防止超出后级电路端口范围的信号进入后级电路,破坏后级A/D电路。CR1为取样电阻,将从CT1输出的电流信号转变为电压信号。LM324和CR4,CR7,CR10,CR13组成同相放大电路将电压信号放大后输入A/D转换电路。 图1中LM324采用双电源供电,这样可以保证LM324输出电压达到5V充分利用A/D转换提高显示精度。图1中通过运放将输入信号进行分档处理,小信号从P1.0输出大信号从P1.1输出。这样处理是因为:电动机保护器要处理的电流范围很宽(要从电动机1倍额定电流到10倍额定电流),分档处理可以提高测量精度。1.2 I/O单元 开关量输入处理电路如图2所示。电路开关量由IN1~IN7输入,通过光藕后产生IS1~IS7,并行信号IS1~IS7输入到74HC165,通过74HC165将并行信号转换为串行信号传送给CPU。电阻R11~R18起到限流作用保护光耦中的二极管不被损坏。RS1~RS8是上拉电阻与电容CS~CS8配合使用既可以稳定光耦输出电平又可以在上电时对光耦起到保护作用。http://www.acrel.cn/cn/download/common/upload/2011/02/28/921bm.jpg图2 开关量输入电路Fig.2 Switching input circuit 继电器控制电路如图3所示。JDQ1~JDQ4与CPU连接,三极管QJ11~QJ14的供电电压是+5V,三极管QJ1~QJ4的供电电压是+24V。现以QJ11,QJ1这路控制电路来说明电路工作原理,当CPU输出高电平时三极管QJ11不导通,OUT11不会输出电流光藕不会导通,JT1也输出高电平,QJ1不会导通继电器不会动作。当CPU输出低电平时三极管QJ11导通,OUT1输出高电平使光耦导通, JT1变为低电平,三极管QJ1导通OUT1输出低电平使继电器发生动作。图3中二极管DJ1~DJ4作为继电器续流二极管。http://www.acrel.cn/cn/download/common/upload/2011/02/28/9147j9.jpg图3 继电器控制电路Fig.3 Relay control circuit 控制输出部分可采用机电式继电器或固体继电器。前者价格便宜,市场产品丰富,驱动线路也比较简单,但可靠性和使用寿命有限,且在触点动作时会产生“火花”,严重时可影响系统的正常工作。因此,在PCB板布局时应将继电器尽量远离单片机并靠近仪表的输出端口。另外,在继电器线圈两端应并联续流二极管,否则在继电器线圈断电瞬间会产生较高的感应电压,从而破坏电路。固态继电器具有寿命长、性能稳定,无火花等特点,本产品中考虑到产品的可靠性要求采用固态继电器。1.3 通讯单元 通讯电路如图4所示。通讯电路实现将CPU串口输出电平转换到RS485电平。本电路的巧妙之处在于数据收发直接由硬件来控制,不用CPU参与控制,这样可以节省CPU资源简化程序设计。http://www.acrel.cn/cn/download/common/upload/2011/02/28/9133sh.jpg图4 通讯电路Fig.4 Communications circuit1.4 CPU单元 CPU单元是电机保护器的核心单元。信号采集,各种报警处理,通信功能,显示功能……都是由它来完成的。本产品采用的CPU芯片是瑞萨公司的H8/3687芯片,该芯片功能如下:62条基本指令; RTC(片上实时时钟,可作为自由运算计数器使用),SCI(异步或者时钟同步串行通信接口)2路,1路IIC接口,8路10位A/D,8位定时器2个(Timer B1,TimerV),16位定时器1个(TimerZ),看门狗定时器,14位PWM,45个I/O引脚(H8/3687N有43个I/O引脚),包括8个可直接驱动LED的大电流引脚(IOL=20mA,@VOL=1.5V),片上复位电源POR电路,片上低电压检测电路(LVD)。该芯片有两种封装形式:LQFP-64(10mm×10mm)FP-64(14mm×14mm) 。CPU单元电路如图5所示。http://www.acrel.cn/cn/download/common/upload/2011/02/28/9112xc.jpg图5 CPU电路Fig.5 Cpu circuit 因为A/D功能,IIC功能,RTC,定时器,看门狗等功能都已经集成到芯片内部,所以CPU单元的外围电路十分简洁,各引脚只需外接增加端口驱动能力的上拉电阻和稳定信号的滤波电容即可。2 软件设计 系统软件要完成三相电流、1路剩余电流、三路电压A/D,各种保护量计算,保护功能判断处理,显示电压、电流,故障记录,按键处理,通讯,变送等功能。只有合理安排程序流程来完成这些功能,保护器才能可靠工作。程序流程图如图6所示:http://www.acrel.cn/cn/download/common/upload/2011/02/28/9059hv.jpg图6 程序流程Fig.6 Flow chart of software3 抗干扰措施 电动机保护器作为保护电动机装置要具有很强的抗干扰性。在本产品软硬件设计过程中采取如下措施提高产品的抗干扰性:1硬件方面:电源部分加EMC滤波器,高频变压器次级与初级加高压电容,输出部分加滤波电路;信号采集部分增加滤波电路;在作信号处理的各芯片输入口处加端口保护电路;在各芯片电源输入处加去藕电容;继电器两端并联续流二极管,加光耦与CPU端口隔离;不使用的CPU端口定义为输出状态;PCB板布局时模拟部分与数字部分作分区处理,模拟信号在模拟区域内布线,数字信号数字区域内布线,二者不进入彼此区域内;布线时尽量加粗电源线与地线,信号线走线时走145º线,不走直角线;使用CPU内部看门狗监控程序运行。2软件方面:各路信号采集都使用软件滤波,增加采样值的准确性。通过采取一系列的措施,产品的抗干扰性能大幅提高,本产品一次性顺利通过3C安全认证型式试验。4 结论 ARD3电动机保护器采用先进的设计方案,集测量、保护、控制、通讯于一身,产品性能安全可靠,可以对电
1.高压电动机过热保护 JW1型双金属温度继电器由测温元件(温控管)及执行元件(出口继电器)两部分组成。温控管用双金属片作为感温元件,用三只温控管串联对称埋人电动机定子绕组端部,并用环氧树脂胶粘牢。将连接导线(用屏蔽导线,屏蔽层与电动机外壳相接)引至电动机高压控制柜。由于JW1型专用继电器容量较亦选用Jwl型双金属温度表继电器。其组成结构及工作原理与高压电动机过热保护装置基本相同。不同之处为选择执行继电器时应选用交流操作的中间继电器。其电压线圈额定值与电动机控制回路电压相一致。可选用DZJ-204X(线圈电压-220V,线圈流0. 5A)间继电器。其二利用执行继电器常闭触点与电动机运行接触器线圈相串联。电动机正常运行时温控管触点开启,中间继电器不动作,而当电动机温度达到温控管动作整定值(该电动机为F级绝缘,为安全起见,实际选用动作值为105度的温控元件)时,温控管触点闭合。此时,执行继电器线圈得电吸合,常闭触点打开,切断电动机主回路接触器电源,使电动机退出运行,达到保护电动机的目的。2.温控管动作整定参考值及执行继电器选择原则 (1)温控管动作整定参考值温控管动作值应与电动机绝缘等级所能承受的最高温度相适应。对于电动机各种不同绝缘等级,在选用温控管时建议采用以下范围内的元件,即A级选用85-95~C,E级选用95100℃,B级选用100-105℃,F级选用120-125℃(2的温控元件。但为安全可靠起见,对温控管动作值选择时最好降低一级使用,以确保电动机安全。同时;也应考虑电动机正常工作温度,因此选择温控管动作值应与所配电动机的绝缘等级及使用环境等因素综合全面考虑,选择最佳动作值来决定温控管的动作整定范围。 (2)执行继电器选择原则 ①由于温控管双金属片触点容量很小,其额定电流在60mA以下,所以执行继电器动作额定电流应选择≤60mA。当控制回路电流很小,满足原配JW1型执行继电器的要求时,也可用原配继电器。因此,选择执行继电器应视实际情况来决定。 ②继电器额定电压应与电动机控制回路电压等级相一致,在交、直流操作情况下其额定电压一般应选择220V似下的电压等级。 ③继电器常开、常闭触点容量应满足控制回路电流的要求。3.温控管安装注意事项 (1)温控管一般采用埋人式安装,安装前应对温控管进行模拟试验,以确定其动作的可靠性。 (2)温控管一般选用3只串联对称埋人电动机定子绕组端部,并固定牢固。 (3)连接导线应选择铜一占线。高压电动机内导线用屏蔽线,屏蔽层与电动机外壳可靠连接,以防感应电压。为了加强导线与高压电动机端部绕组间的绝缘强度,在屏蔽线外部紧密缠绕三层薄云母带,云母带外缠绕一层白纱带,外刷环氧树脂漆一道,烘干即可。低压电动机用BV-105℃耐温线。导线应与温控管管脚紧密连接。电动机内部的连接导线应套上耐温的黄蜡软管,导线绝缘合格,固定平整可靠.
电子式拉力试验机是现代电子技术与机械传动技术相结合的产物,是充分发挥了机电各自特长而构成的大型精密测试仪器,可对各种材料进行拉伸、压缩、弯曲等多项性能试验,且有测量范围宽、精度高、响应快等特点。工作可靠,效率高,可对试验数据进行实时显示记录、打印。 电子式拉力试验机是由测量系统、驱动系统、控制系统、及电脑等结构组成。一.测量系统1. 力值的测量 通过测力传感器、放大器和数据处理系统来实现测量,最常用的测力传感器是应变片式传感器。所谓应变片式传感器,就是由应变片、弹性元件和某些附件(补偿元件、防护罩、接线插座、加载件组成),能将某种机械量变成电量输出的器件。 应变片式的拉、压力传感器国内外种类繁多,主要有筒状力传感器、轮辐式力传感器、S双连孔型传感器、十字梁式传感器等类型。 从材料力学上得知,在小变形条件下,一个弹性元件某一点的应变ε与弹性元件所受的力成正比,也与弹性的变形成正比。以S型传感器为例,当传感器受到拉力P的作用时,由于弹性元件表面粘贴有应变片,因为弹性元件的应变与外力P的大小成正比例,故此将应变片接入测量电路中,即可通过测出其输出电压,从而测出力的大小。 对于传感器,一般采用差动全桥测量,即将所粘贴的应变片组成桥路, R1、R2、R3、R4,实际为阻值相等的4片(或8片)应变片,即R1=R2=R3=R4,当传感器受到外力(拉力或压力)作用时,传感器弹性元件产生应变而使各电阻值发生变化,其变化值分别为△R1△、R2、△R3、△R4,结果原来平衡的电桥,现在不平衡了,桥路就有电压输出,设△E则△E= [R1R2/(R1+R2)2 ]△R1/R1-△R2/R2+△R3/R3-△R4/R4)U式中U为外电源供给桥路的电压进一步筒化有 △E=[R2/4R2](△R1/R-△R2/R+△R3/R-△R4/R)U将△Ri/Ri=Kεi代上上式则有 △E=[UK/4](ε1-ε2+ε3-ε4) 简单来说,外力P引起传感器内应变片的变形,导致电桥的不平衡,从而引起传感器输出电压的变化, 我们通过测量输出电压的变化就可以知道力的大小了。 一般来说,传感器的输出信号都是非常微弱的,通常只有几个mV,如果我们直接对此信号进行测量,是非常困难的,并且不能满足高精度测量要求。因此必须通过放大器将此微弱信号放大,放大后的信号电压可达10V,此时的信号为模拟信号,这个模拟信号经过多路开关和A/D转换芯片转变为数字信号,然后进行数据处理,至此,力的测量告一段落。2. 变形的测量通过变形测量装置来测量,它是用来测量试样在试验过程中产生的形变。该装置上有两个夹头,经过一系列传动机构与装在测量装置顶部的光电编码器连在一起,当两夹头间的距离发生变化时,带动光电编码器的轴旋转,光电编码器就会有脉冲信号输出。再由单片机对此信号进行处理,就可以得出试样的变形量。3横粱位移的测量其原理同变形测量大致相同,都是通过测量光电编码器的输出脉冲数来获得横梁的位移量。二.驱动系统 主要是用于试验机的横梁移动,其工作原理是由伺服系统控制电机,电机经过减速箱等一系列传动机构带动丝杆转动,从而达到控制横梁移动的目的。通过改变电机的转速,可以改变横梁的移动速度。三.控制系统 顾名思义,就是控制试验机运作的系统,人们通过操作台可以控制试验机的运作,通过显示屏可以获知试验机的状态及各项试验参数,若该机带有电脑的话,也可以由电脑实现各项功能并进行数据处理分析、试验结果打印。试验机同电脑之间的通信一般都是使用RS232串行通信方式,它通过计算机背后的串口(COM号)进行通信,此技术比较成熟、可靠,使用方便。四.电脑 用来采集和分析数据,进入试验界面后,电脑会不断采集各样试验数据,实时画出试验曲线,自动求出各试验参数及输出报表。
大家有没有谁用过多联电动搅拌机啊,小弟想买一个,但是不知哪家的好,请推荐下
求助一下大家,客户要求提供真实应力应变曲线和工程应力应变曲线,现在我们用的是Zwick 10t的拉伸试验机,不知道如何让试验机绘制真实应力应变曲线,而且不知道能不能把这两个曲线弄到一张图上。
[B][font=楷体_GB2312][size=4][color=#DC143C]IPC/JEDEC-9704 印制线路板应变试验准则[em09504][/color][/size][/font][/B][~180198~]

电动车恒温恒湿试验箱是专门给电动车行业检查产品在不同温湿度环境下使用情况的试验设备,但实际上设备的性能和标准试验箱几乎都是相同的,可能就是设备的体积更大一些。而现在国内能够出售这款设备的厂家数量也有很多,但实际上真正能够生产出高质量设备的厂家数量并不多。[align=center][img=,690,517]http://ng1.17img.cn/bbsfiles/images/2018/06/201806081411594590_6583_3222217_3.jpg!w690x517.jpg[/img][/align]因为很多厂家为了能够获得更多利润,放弃了产品的研发创新工作,试验箱质量、性能的提高全靠借鉴国外的试验设备。但是国内很多厂家在生产时都不愿意使用优质的零配件和控制系统,所以导致出售的设备质量并不是非常可靠,不过这些厂家会为了吸引用户降低设备的价格,如果用户因为他们价格低廉就购买了他们的试验设备,那么可能在之后使用过程中设备会经常出现故障,让用户只能联系生产厂家让技术人员上门处理之后才能继续使用。恒温恒湿试验箱在电动车行业中有着非常重要的地位,所以大家不要因为价格便宜就轻易选择,因为这样非常容易耽误用户的时间和精力,而且还有可能给企业造成无法挽回的损失。
前段时间采用ISO6892方法A中的应变控制模式做实验,使用的INSTRON的设备,发现一个和MTS不同的地方。MTS C64.305的型号,中PID参数需要自己调整,而INSTRON的则是全自动的。只用过这两家的设备,求助别的试验机厂家是怎么样达到应变控制目的?
求助:我公司最近准备购买一台安捷仑公司7890炼厂气分析仪,协议签的为四阀六柱三检测器(双TCD+FID),哪位高人能告诉我这种配置的工作原理,我也好提前学习,谢谢了http://simg.instrument.com.cn/bbs/images/brow/em09511.gif
AC7101标准中规定:If the specification does not reference a specific strain rate, the strain rate for both room and elevated temperature tensile testing is to be 0.003 to 0.007 inch/inch/minute through yield, and 0.05 inch/inch/minute after yield, with the yield point being determined at 0.2% offset, unless specified otherwise.拉伸试验中应力应变速率屈服前为0.003到0.007 in/in/min,屈服后的速率为0.05in/in/min.而新三思给我们设定的移动速率为2mm/min,这是如何转换的?是否符合以上规范要求?国产设备可以实现应力应变速率控制吗?
据苏州高新股份4月15日消息,由中国机械工业联合会组织的科技成果鉴定会在苏州召开,会议对苏高新股份下属东菱公司自主研制的100吨电动振动试验系统等产品技术进行了科技成果鉴定。[b]由中国科学院院士胡海岩、翟婉明领衔的7位行业权威专家组成的鉴定委员会一致认为,ES-1000型(100吨)电动振动试验系统已通过计量检定,是我国自行研制的单台最大推力的电动振动试验装备,获得多项国家发明专利,具有完全自主知识产权。该装备为全球首台套,总体水平国际领先。[/b][align=center][b][img=东菱.png]https://img1.17img.cn/17img/images/202404/uepic/f8456888-e070-4f7d-8d4b-eaba547ec817.jpg[/img][/b][/align]据悉,此次100吨电动振动试验系统的成功研制,是东菱公司继2007年研制出世界最大推力35吨振动台、2012年推出世界最大推力50吨振动台后取得的又一个“世界第一”。东菱公司于2021年开始对单体100吨电动振动试验系统的自主研发。历时2年的技术攻关,突破了超大推力高强动圈设计制造技术、动圈自适应高效冷却控制技术,以及超大型功率放大器等关键核心技术,解决了超大推力驱动下动圈设计制造难、导向持续可靠性稳定性差,以及超大推力电动振动试验系统发热量大、冷却效果差等难题,成功研制出单体100吨超大推力电动振动试验系统,通过了中国计量院的第三方计量。100吨电动振动试验系统的成功推出,可满足我国航空航天、船舶、轨道交通等重大部件乃至整机的可行性试验需求,提供可靠的试验保障,为我国高端装备制造的整机和零部件模拟现实工况提供正弦振动、随机振动、冲击、连续碰撞等力学试验,还可与环境试验箱配用进行综合环境的可靠性试验等等,为解决我国重点科研产品进行大推力振动试验的瓶颈问题提供全面的解决方案。[来源:仪器信息网] 未经授权不得转载[align=right][/align]

XTDIC三维全场应变测量分析系统,结合数字图像相关技术(DIC)与双目立体视觉技术,通过追踪物体表面的散斑图像,实现变形过程中物体表面的三维坐标、位移及应变的测量,具有便携,速度快,精度高,易操作等特点。http://ng1.17img.cn/bbsfiles/images/2016/06/201606021457_595779_3024107_3.jpghttp://ng1.17img.cn/bbsfiles/images/2016/06/201606021457_595780_3024107_3.png图:系统测量原理及散斑图像追踪过程系统组成:统主要由测量头、控制箱、标定板、标志点、计算机及检测分析软件等组成系统应该包含系统测量头(含两台高速工业相机、进口相机镜头,带万向手柄可调节LED光源)、相机同步控制触发控制箱、系统标定板、系统可移动支撑架、动态采集分析软件、载荷加压控制通讯接口、计算机系统等组成。1.1 主要应用XTDIC 三维数字散斑动态变形测量分析系统是实验力学领域中一种重要的测试方法,其主要应用有:在材料力学性能测量方面:DIC已成功应用于各种复杂材料的力学性能测试中。如火箭发动剂固体燃料、橡胶、光纤、压电薄膜、复合材料以及木材、岩石、土方等天然材料的力学性能的检测中。值得注意的是,DIC被广泛应用于破坏力学研究中,包括裂纹尖端应变场测量、裂纹尖端张开位移测量以及高温下裂纹尖端应变场测量等。在细观力学测量方面:借助于扫描电子显微镜(SEM)、扫描隧道电子显微镜(STEM)以及原子力显微镜(AFM),DIC被越来越多地应用于细观力学测量。最近,数字散斑相关方法还被应用于物体表面粗糙度的测量中。在损伤与破坏检测方面:DIC被应用于多种复杂材料,如岩石、炸药材料的破坏检测中。DIC还被应用于一些特殊器件,如陶瓷电容器、电子器件,电子封装的无损检测研究中。在生物力学测量方面:DIC被应用于测量手术复位后肱骨头在内旋转及前屈运动下大小结节的相对位移量,以及颈椎内固定器对人体颈椎运动生物力学性能的影响等。对于大中专院校的研究教学应用,本系统开展各种软组织、金属及复合材料性能测试、力学性能测试分析、有限元分析验证等研究和教学实验,具有大至1000%应变测量范围,并可以实时计算、实现动态全场的应变变形测量。在土木工程的相关研究中,如四点弯试件、半圆弧试件、悬臂梁实验,对应完整实验设计方案,以非接触式的方式提升研究手段,提高研究能力。亦可为学生提供可视化的教学工具,让学生的基础学习课程变得直观和可视,使复杂问题简单化、抽象问题直观化、隐蔽问题可视化。1.2 系统功能(1)基本测量功能:l ※测量幅面:支持几毫米到几米的测量幅面,可以根据需求定制测量幅面。l 测量相机:支持百万至千万像素、低速到高速、千兆网和Camera Link等多种相机接口,控制软件最大支持采集帧率10万 fps。l ※相机标定:支持多个相机(可多于8个)多种测量幅面的标定,支持外部拍摄图像标定。l ※测量模式:三维变形测量,同时支持单相机二维测量。l ※实时计算:采集图像的同时,可以实时进行三维全场应变计算,具备在线和离线两种计算处理模式。l 计算模式:具备自动计算和自定义计算两种模式。l 测量结果:全场三维坐标、位移、应变数据等动态变形数据,应变模式有工程应变、格林应变、真实应变等三种。l 多个检测工程:系统软件支持多个检测工程的计算、显示及分析。l ※支持系统:支持32位、64位windows操作系统,具备64位计算和多线程加速计算功能。(2)分析报告功能l ※18种变形应变计算功能:X、Y、Z、E三维位移;Z值投影;径向距离、径向距离差;径向角、径向角差;应变X、应变Y和应变XY;最大主应变;最小主应变;厚度减薄量;Mises应变;Tresca应变;剪切角。l ※坐标转换功能:321转换、参考点拟合、全局点转换、矩阵转换等多种坐标转换功能。l ※元素创建功能:三维点、线、面、圆、槽孔、矩形孔、球、圆柱、圆锥。l ※分析创建功能:点点距离、点线距离、点面距离、线线夹角、线面夹角、面面夹角。l 数据平滑功能:均值,中值,高斯滤波等多种平滑功能。l 数据插值功能:自动和手动两种数据插值模式。l 材料性能分析:自动计算材料的弹性模量和泊松比等参数。l 三维截线功能:可对三维测量结果进行直线或圆形截线分析。l 曲线绘制功能:所有测量结果均可以绘制成曲线图。l 成形极限分析功能:可绘制和编辑FLD成形极限曲线。l 视频创建功能:可将测量过程二维图像或者三维测量结果制作成视频并输出保存。l 数据输出功能:测量结果及分析结果输出成报表,支持TXT,XLS,DOC文件的输出。(3)采集控制功能l ※采集控制箱可以实现测量头的控制、多个相机的同步触发、多路模拟量和开关量数据采集、输入和输出信号控制。l 相机同步控制:多相机外同步触发信号。l ※外部采集通讯接口:支持外部载荷如微电子万能试验机等外部载荷联机采集通讯接口,通过串口通讯或者模拟量实时采集外部的加载力、位移等信号,并与三维全场应变测量数据实现同步,实现应力和应变数据的融合和统一。l 光源控制:可以实现测量过程中不同补光需要的LED光源控制。(4)预留扩展接口:l ※多测头同步检测接口:可以支持1~8个测头的多相机组同步测量,相机数目任意扩展,可以同步测量多个区域的变形应变,适用于不同实验条件需求下的变形应变测量。l ※显微应变测量:配合双目体式显微镜,系统可以实现微小视场的三维全场变形应变检测,并可支持扫描电镜、原子显微镜等显微图像的应变数据计算。l ※大尺寸全方位变形接口:支持摄影测量静态变形系统,实现全方位变形和局部全场应变检测数据的融合和统一。1.3 技术指标 指标名称技术指标1. ※核心技术多相机柔性标定、数字图像相关法2. 测量结果三维坐标、全场位移及应变,可视化显示及测量过程的视频录制输出,测量结果及数据输出成报表,支持TXT,XLS,DOC文件的输出。3. ※测量幅面支持1mm-4m范围的测量幅面,并配备相应编码型标定板标定架,可定制更多测量幅面。4. ※测量相机支持百万至千万像素相机,支持低速到高速相机,支持千兆网和Camera Link等多种相机接口,控制软件最大支持采集帧率10万 fps)5. 相机标定简单快捷,需要可支持任意数目相机的同时标定,支持外部图像标定6. ※位移测量精度0.005像素7. ※应变测量范围0.01%-1000%8. ※应变测量精度0.001%9. 测量模式三维变形测量,可兼容二维测量10. ※实时测量计算采集图像的同时,实时进行全场应变计算11. ※系统控制2采集控制箱可以实现测量头的控制、多个相机的同步触发、多路模拟量和开关量数据采集、输入和输出信号控制。2相机同步控制:多相机外同步触发信号。2外部采
浅谈塑料薄膜拉力机用途及结构原理 塑料薄膜拉力机用途 塑料薄膜拉力机是专用于塑料材料力学试验的试验机,是结合电子万能试验机,拉力机而开发的全自动拉力机,计算机和触摸屏控制器都可单独试验,并实现数据保存,数据处理,数据打印,数据传输等功能,试验数据和导入EXCEL中,对试验数据进行优化处理,也可生成文本数据报告,直接打印,金属拉力机广泛用于科研院校,企业单位质检,研发部门的产品检测和产品开发试验中。 同时,塑料薄膜拉力机广泛应用于胶黏剂、橡胶、塑料、纺织物、防水材料、无纺布等非金属材料及金属丝、金属箔,金属片的力学性能试验。增加附件还可做压缩、弯曲试验。 塑料薄膜拉力机结构原理 塑料薄膜拉力机采用机电一体化设计,主要由测力传感器、变送器、微处理器、负荷驱动机构、计算机及彩色喷墨打印机构成。高精度电子调速电动机可设置无级试验速度。各集成构件间均采用插接方式联接。落地式机型,造型涂装均充分考虑了现代工业设计,人体工程学之相关原则。 计算机控制试验指令后,系统自动清零;试验结束后,自动判别断裂,夹具自动返回初始位置,可更换不同的夹具,可进行不同的试验;试验全程不换档;可任意设定试验速度,可选择试验力、试验速度、位移、应变等试验方法。单片机全程记录测试数据。提供保存、对比和追踪等功能服务可用鼠标任意找出试验曲线逐点的力值和变形数据分析,具有自动限位和超载,过流,欠压自动保护功能。 自动计算各种试验结果,配备高精度编码器,自动测量位移行程及标点间伸长量。高精度的软硬件技术及整合能力,充分体现精湛的制造工艺及灵巧的力度。

[b] 新能源电池试验箱原理[/b]主要用于锂电池单元、锂电池模块、锂电池组等相关产品的研发验证和质量检验,已成为锂电池安全型式试验、BMS管理系统研发等必不可少的气候环境模拟安全设备。[align=center][img=,680,680]https://ng1.17img.cn/bbsfiles/images/2021/09/202109031626355787_15_1037_3.jpg!w680x680.jpg[/img][/align] 在新片开发或产品检测过程中,锂电池会出现许多不合格因素,当然,许多都是安全因素。导致锂电池起火爆炸。这也是测试的目的。 新能源电池试验箱原理起火的原因大概有几个: 1、内部短路:由于电池的滥用,如过充过放引起的支晶、电池生产过程中的杂质和灰尘等。,会恶化产生穿透隔膜,产生微短路。电能的释放会导致温升,温升引起的材料化学反应会扩大短路路径,形成更大的短路电流。这种相互积累的相互增强的破坏会导致热失控。 2、外部短路:以电动汽车为例。实际车辆运行中危险的概率很低。电池能承受短时间大电流冲击。有一些情况是短路点超过整车熔断器,BMS失效。长期外部短路通常会导致电路中连接的弱点烧毁,很少导致电池热失控。如今的企业采用在回路中加入熔断丝的方法,可以更有效地避免外部短路的危害。 3、由于外部高温:由于锂电池结构的特点,SEI膜、电解液、EC等。在高温下会发生分解反应,电解液的分解物也会与正极和负极发生反应,电池隔膜会融化分解,各种反应会导致大量热量。隔膜融化导致内部短路,电能释放增加热量生产。 为避免出厂成品新能源电池试验箱原理出现问题,锂电池出厂前必须进行低温、高温、热冲击、过冲过放、针刺挤压、锂电池包热泛滥、火烧等多项标准的安全试验。
请教大家目前在做金属测试时是否都倾向于用应变控制的方法做拉伸试验? 如果要严格的实现0.00025mm/mm/s,目前国产试验机可以做到么?
拉力试验机,拉力机等高精密检测仪器,仪器测量精度也已达到国家精度0.5级。拉力试验机根据《电子式万能试验机》GB/T 16491-2009标准制造,GB/T16825-2010《拉力试验机的检验》进行检定和验收,并根据GB、ISO、DIN、ASTM、JIS等国际标准进行试验和提供数据,严格按照国家标准、行业标准和国际标准。 http://www.shfarui.com/zyzmxyhuayuweb2011/UploadFile/20148188376891.jpg拉力机原理,拉力试验机,拉力机主要由电器及机械两部分组成.机械部分由马达为原动力,通过蜗轮减速机将速度降到所需速度,再经过丝杆传动 ,经过马达之正反转动,中联板上下移动配合夹具,从而实现了拉压过程.传动丝杆配以三个轴承.(上联板两个,底板一个)丝杆背后装一引导杆其主要用于引导中联板在上升下降时保持平衡. 横梁位移的测量其道理同变形测量大致一样,都是经过测量光电编码器的输出脉冲数来取得横梁的位移量。 1、拉力试验机力值的测量是经过测力传感器、扩大器和数据处置系统来完成测量。从资料力学上得知,在小变形前提下,一个弹性元件某一点的应变ε与弹性元件所受的力成正比,也与弹性的变构成正比。以S型试验机传感器为例,上海发瑞仪器采用是美国品牌进口传感器当传感器遭到拉力P的效果时,因为弹性元件外表粘贴有应变片,由于弹性元件的应变与外力P的巨细成正比例,故此将应变片接入测量电路中,即可经过测出其输出电压,然后测出力的巨细。 2拉力机软件操作系统核心器件采用进口最新型超高精度24位AD,采样速率400次/秒时全程不分档分辨率为100000分度。并采用3点校准技术进一步提高精度,力量采集精度达到国家0.1级标准。与PC机通讯,配上专用的FR2101Pro专业豪华版测控软件,实时显示力-位移、力-时间、位移-时间、应力-应变等曲线,自动计算最大力、屈服力、平均力、最大变形、屈服点、弹性模量等参数,并具有灵活的报表编辑和打印功能。 3、形变的测量经过形变测量安装来测量,它是用来测量试样在实验进程中发生的形变。 该安装上有两个夹头,经由一系传记念头构与装在测量安装顶部的光电编码器连在一同,当两夹头间的间隔发作转变时,带动光电编码器的轴扭转,光电编码器就会有脉冲旌旗灯号输出。再由处置器对此旌旗灯号进行处置,就可以得出试样的变形量。,
万能试验机是现代电子技术与机械传动技术相结合的产物,是充分发挥了机电各自特长而构成的大型精密测试仪器,可对各种材料进行拉伸、压缩、弯曲等多项性能试验,且有测量范围宽、精度高、响应快等特点。工作可靠,效率高,可对试验数据进行实时显示记录、打印。 万能试验机是由测量系统、驱动系统、控制系统、及电脑等结构组成。 1、测量系统: ①力值测量 通过测力传感器、放大器和数据处理系统来实现测量。最常用的测力传感器是应变片式传感器,当外力作用在传感器上时,引起传感器输出电压的变化,而传感器输出的电压通过放大器和数据处理系统。将电信号转化成数值,即所施加力的大小 ②变形的测量 通过变形测量装置来测量,它是用来测量试样在试验过程中产生的形变。 该装置上有两个夹头,经过一系列传动机构与装在测量装置顶部的光电编码器连在一起,当两夹头间的距离发生变化时,带动光电编码器的轴旋转,光电编码器就会有脉冲信号输出。再由单片机对此信号进行处理,就可以得出试样的变形量。 ③横粱位移的测量 其原理同变形测量大致相同,都是通过测量光电编码器的输出脉冲数来获得横梁的位移量。 2、驱动系统: 主要是用于试验机的横梁移动,其工作原理是由伺服系统控制电机,电机经过减速箱等一系列传动机构带动丝杆转动,从而达到控制横梁移动的目的。通过改变电机的转速,可以改变横梁的移动速度。 3、控制系统: 控制系统是控制试验机运作的系统,人们通过操作台可以控制试验机的运作,通过显示屏可以获知试验机的状态及各项试验参数,若该机带有电脑的话,也可以由电脑实现各项功能并进行数据处理分析、试验结果打印。试验机同电脑之间的通信一般都是使用RS232串行通信方式,它通过计算机背后的串口(COM号)进行通信,此技术比较成熟、可靠,使用方便。 4、电脑: 万能试验机用来采集和分析数据,进入试验界面后,电脑会不断采集各样试验数据,实时画出试验曲线,自动求出各试验参数及输出报表
[back=#00b0f0][/back][img=车用PP高应变速率下的应力-应变曲线获得方法研究]https://p3-tt.byteimg.com/origin/pgc-image/dbcfe59c0b32483a9206d9b5264fd3c1?from=pc[/img][back=#f6f9fd]摘要:[/back][back=#f6f9fd]在通常的汽车碰撞CAE仿真分析中,需要用到应变速率从0.01~100 s-1全应变速率下甚至更高应变速率下的应力-应变曲线。当测试速率达到1 s-1甚至更高时,数据的获得就变得困难起来。通常有两种方法:采用方程拟合法 采用液压原理的高速拉伸试验机测试。结果表明,采用方程拟合的方法可以得到比测试得出的最高应变速率高出两个数量级的曲线及特征值;对于达到峰值应力后应力变化较小的曲线,方程拟合法准确性较好,对于达到峰值应力后应力降低或增加的材料,方程拟合法的准确度稍弱。[/back][align=center][/align]关键词:高速拉伸 方程拟合法 直接测试法 非接触式引伸计 CAE分析汽车在进行碰撞过程中,整个过程只有0.1~0.2 s,会产生大量的能量吸收与转移,而这个能量吸收与转移的能力与材料有关。然而困扰汽车设计的一大难题就是选材。现阶段,车用材料制备结构件需要前期进行更多的模拟试验,CAE动态分析是不可或缺的。而车用材料CAE分析面临着动态拉伸数据获得难的问题,也就是说高应变速率下(如应变速率大于1 s-1)的应力-应变曲线获得相当困难。需要材料在高应变速率下的拉伸数据。目前国际上针对非金属材料的高速拉伸测试方法主要有两个:采用ISO 18872:2007《塑料高应变速率下的拉伸性能测试》(由金发科技股份有限公司联合其他单位已经将其等效转化为国家标准发布,以下简称方程拟合法)和采用高速拉伸试验机直接进行测试——直接测试法。方程拟合法是针对塑料高速拉伸测试的标准,计算出塑料在高速下的力学性能。而直接测试法主要是指使用高速拉伸设备直接测试。[align=center][/align][color=#346eb7]01测试原理[/color]方程拟合法:依据ISO 527-2:2012,拉伸应力-应变曲线在0.1~100 mm/s选定速度下测试获得。同时,测量泊松比随应变的变化。由测试结果,可计算出各应变速率下的真实应力和真实塑性应变值。通过数学函数方程可对各应力-塑性应变曲线进行准确模拟。同时,也可以建模分析此函数中的参数随应变速率的变化,从而外推得出较高应变速率下的参数值。通过计算就可获得较高应变速率下的应力-应变曲线。直接测试法:通过设置应变速率或测试速度、接触力、数据采集频率等参数,使用高速拉伸试验机,沿试样纵向主轴恒速拉伸,直到断裂或应力(负荷)或应变(伸长)达到某一预定值,测量在这一过程中试样承受的负荷及其伸长。[color=#346eb7]02方程拟合法[/color][b][color=#ff8124]2.1 低速下特征数据的测试[/color][/b]1) 测试速度选择:试样在0.1,1,10 mm/s速度下进行测试。2) 测试样品:对于在屈服应变以下的性能测试(见ISO 527-2:2012),可使用ISO标准中的1A,1B或1BA试样。3) 测试设备选择:对设备的一般要求见ISO 527-1:2012。当测试速度达到10 mm/s以上时,通常要使用液压伺服式测试设备。为顺应大多数厂家的条件,测试时采用的设备为普通拉力机。[b][color=#ff8124]2.2 结果计算[/color][/b]在选定的测试速度0.1,1,10 mm/s下进行拉伸测试,得出达到屈服应变前的工程应力σ,工程应变ε、拉伸模量E和泊松比μ。根据式(1)计算各应变下的真实应力σT:[img=车用PP高应变速率下的应力-应变曲线获得方法研究]https://p6-tt.byteimg.com/origin/pgc-image/66546996b6f5446cbe10899be29cb0b9?from=pc[/img][align=right](1)[/align]式中:σ为工程应力 μ是由工程应变计算的泊松比。根据式(2)计算真实应变εT:[img=车用PP高应变速率下的应力-应变曲线获得方法研究]https://p6-tt.byteimg.com/origin/pgc-image/4b53cfd50166404c8b22f0fbf14e55b2?from=pc[/img][align=right](2)[/align]根据式(3)计算各应变下的真实塑性应变A:[img=车用PP高应变速率下的应力-应变曲线获得方法研究]https://p3-tt.byteimg.com/origin/pgc-image/2a452345dabb46348dddd8b3f4ccb12c?from=pc[/img][align=right](3)[/align]式中:εe为弹性部分的应变,考虑到εe?1时不用再计算真实弹性应变,因此式(3)做了这样的近似处理。[b][color=#ff8124]2.3 应力塑性应变曲线建模分析[/color][/b][color=#ff8124]2.3.1 低速下参数拟合[/color]根据式(4)进行拟合。拟合模型派生出的参数σ0,σf,B,β的数值,从而使每一测试速度下的真实应力σT与计算得出塑性应变A能够很好地契合。[img=车用PP高应变速率下的应力-应变曲线获得方法研究]https://p1-tt.byteimg.com/origin/pgc-image/011433bece884a1db7393cae475e59dc?from=pc[/img][align=right](4)[/align]式中:σ0表示无塑性应变时的应力,其值取决于代表应力-应变曲线的线性段的斜率E,σf是高塑性应变时的极限应力。参数B和β决定平均塑性应变及应变范围,在这个范围内,真实应力随着真实塑性应变的增加而增加。[color=#ff8124]2.3.2 高速下方程参数拟合[/color]将参数σf(每一测试速度下)与塑性应变速率的对数作图。将数据进行最佳的线性拟合,并将直线外推至最大测试速率以上两个数量级的应变速率。在此范围内可通过图形或以下公式得出任一应变速率下的σf 的值:[img=车用PP高应变速率下的应力-应变曲线获得方法研究]https://p1-tt.byteimg.com/origin/pgc-image/a84ed35824264686a35416f6ed88ff75?from=pc[/img][align=right](5)[/align]式中:C为应力轴上的截距 a为曲线斜率。计算有效塑性应变速率A′ 时,可以通过计算峰值应力下的塑性应变随时间的变化速率,如没有峰值应力则采用屈服应力。通过在不同应变速率下的试验数据拟合式(4)的参数值,获得每一个参数的平均值,从而得出参数σ0,σf,B,β的单一数值。[b][color=#ff8124]2.4 高应变速率下材料的应力-应变曲线[/color][/b]根据方程拟合法的原理可知,采用方程拟合法得到高应变速率下的应力-应变曲线,需要用到式(4),而式(4)适合于带有屈服的样品的拟合。因此对于脆性材料便不适合应用此公式得到高应变速率下的应力-应变曲线。对于聚丙烯(PP)、聚碳酸酯(PC)韧性材料,可以采用方程拟合法得到高应变速率下的应力-应变曲线。根据测试所得数据,将某PP材料以及某PC材料使用式(4)以及式(5)进行拟合的各参数如表1所示。[align=center]表1 拟合得出的参数[/align][img=车用PP高应变速率下的应力-应变曲线获得方法研究]https://p3-tt.byteimg.com/origin/pgc-image/6117d354716a41d0b81e4ffbc7fa0588?from=pc[/img]根据上述拟合的参数,得出高应变速率下的PP,PC应力-应变曲线,如图1,2所示。图1,2中曲线1,3,5分别为0.1,1,10 mm/s速度下测试所得的结果,曲线2,4,6分别为0.1,1,10 mm/s速度下根据式(4)拟合的结果,曲线8,10为采用式(4)与式(5)拟合的结果。[color=#346eb7]03[/color][color=#346eb7]直接测试法[/color]通过设置应变速率或测试速度、接触力、数据采集频率等参数,使用高速拉伸试验机直接进行测试。测试设备应至少可以进行12 m/s速度下的拉伸测试。为实施此速度下的拉伸测试,设备应采用液压伺服式,实际测试速度允许偏差在±15%以内。可见测试装置的设计是非常重要的,使用高硬度的测力传感器(如压电式的)和轻质高刚度的部件是必要的。对于引伸计的选择,通常选择非接触式的引伸计。且引伸计的数据采集频率需要足够高。采用直接测试法得出PP,PC在100,1 000 mm/s测试速度下的结果(图1,2中曲线7,9)。测试设备:Zwick/Roell HTM 2512型高速拉伸试验机 设备测试速度范围:0.0001~12 m/s 引伸计:非接触式光学引伸计。[img=车用PP高应变速率下的应力-应变曲线获得方法研究]https://p6-tt.byteimg.com/origin/pgc-image/4789d25a65d94e5d87b5df466682d0b5?from=pc[/img][img=车用PP高应变速率下的应力-应变曲线获得方法研究]https://p1-tt.byteimg.com/origin/pgc-image/5899018541ef4d27915483314e45059a?from=pc[/img][align=center]图1 PP材料的真实应力-真实应变曲线[/align][img=车用PP高应变速率下的应力-应变曲线获得方法研究]https://p6-tt.byteimg.com/origin/pgc-image/13a12a741fe1467d8a9bb253abf2cafc?from=pc[/img][img=车用PP高应变速率下的应力-应变曲线获得方法研究]https://p6-tt.byteimg.com/origin/pgc-image/52d4386c1dca4fa5baef3cbe192b18f8?from=pc[/img][align=center]图2 PC材料的真实应力-真实应变曲线[/align][align=center][/align][color=#346eb7]04 分析与讨论[/color]两种方法均可以得出高应变速率下的应力-应变曲线,其在操作过程中差异明显,但在结果上,对于进行测试的两种材料而言,差异不大。由图1,2可见,采用方法拟合的曲线与采用直接测试得出的曲线在100,1 000 mm/s(高于最高测试速度两个数量级)时吻合情况尚可,对于CAE模拟所需的关键数据可以得出较准确的值。但是仔细观察两个曲线,发现对于PP材料而言,随着应变的增加,应力增加到最大值后变化幅度较小,而采用方程拟合法拟合时,由于方程本身的特性,达到屈服应力后,应力变化小,不会出现增加或降低很大的情况,与材料实际测试曲线吻合较好。而观察PC的测试曲线时发现,PC材料本身的应力达到最大值后,由于材料本身的原因塑性段会出现一个急速的力值降低再升高的过程,而式(4)本身描述的曲线确是塑性应变很小的,可见,对于曲线类似PC类(塑性段应力值降低)的材料采用式(4)很难达到很好的拟合效果,但是对于弹性段和应力的拟合是可以接受的。然而,在应力峰值出现后,受材料分子排布的刚性影响,真实应力随着应变增加或降低的材料也是较多的,如果真的要达到一致性较高的模拟,可以建议在式(4)的基础上加一个类似抛物线的参数项得到,即[img=车用PP高应变速率下的应力-应变曲线获得方法研究]https://p3-tt.byteimg.com/origin/pgc-image/5dbb3c6963c04605b96702b456bce8d1?from=pc[/img][align=right](6)[/align]其中,δ用来描述在应力出现峰值之后的应力下降,F为应力最小时的塑性应变值,H是高塑性应变时的极限应力。式(6)中的参数H仍然比式(4)中的σf稍大一些,因为要弥补由加入类抛物线参数项而引起地峰值之后的应力值降低。然而经过试验证明,即使是添加了类抛物线的参数项,仍然很难达到类似前文中PP材料拟合的一致性,对于达到应力峰值后应力增加或降低的材料,无论是哪种CAE软件中的本构关系,都很难达到一致性较高的拟合。因此,采用方程拟合法只能近似的模拟而不能完全替代高速拉伸测试仪给出的实际测试结果。[b][color=#346eb7]05 结论[/color][/b][color=#ff8124]经过理论分析与试验证实:[/color]1) 采用所述的方程拟合的方法可以得到比测试得出的最高测试速度(应变速率)高出两个数量级的测试速度下(应变速率下)的曲线及特征值。2) 对于选用的PP材料而言,采用方程拟合的方法得出的数据与实际采用高速拉伸测试仪得出的数据吻合情况较好,对于CAE模拟所需的关键数据可以得出较准确的值 但是对于选用的某PC材料而言,两种方法得出的数据有差异,且此差异可能会影响后续应用于CAE仿真分析的结果。经过多次验证,无论是采用哪种CAE软件中的本构关系,对于达到峰值应力后应力降低或增加的材料, 都很难得到实际测试曲线与拟合曲线结果一致性很高的曲线,乃至根据方程的缺陷做了一些改变,按照现有的技术,仍然很难得到一致性很好的拟合,可见采用方程拟合法最终只能近似的模拟而不能完全替代高速拉伸测试仪给出的实际的测试结果。3) 采用方程拟合法测量的材料性能数据精度还不能评估。欲使用方程拟合法获得高应变速率下的应力-应变数据时,建议低速下的拟合的精度尽量高。
这是我校采购的试验仪器,请问这试验仪器的应变片怎么安装?有什么安装技巧?http://www.junlincn.com/uploads/allimg/121023/3-1210231444310-L.jpg
简支梁冲击试验机冲击破坏的原理是对硬质塑料试样施加一次冲击弯曲负荷使试样破坏,并用试样破坏时单位面积所吸收的能量衡量材料冲击韧性的方法,是用来量度材料在承受高速作用力时的韧性或对断裂的抵抗能力。材料的冲击性能在实际生产中具有很大意义。韧性聚合物的冲击强度远远高于脆性材料。冲击强度从定义上来看是“单位截面积的试样被冲断时所吸收的功”,似乎只与高分子化学键的强度和受力冲击的试样面积有关,实际上是与吸收冲击能量的材料体积有关。如果在外力冲击下高分子链段来不及松弛,应力波不受转移地连续向前传播保持尖锐的应力波前锋,这时只有很小体积内的聚合物承受应力,则在应力足够大时就会发生脆性断裂。 分子链能在外力作用下进行一定的松弛运动并带动附近的链段也承受应力,这样应力波传播的范围越来越大,显然需要更大的应力才能使材料断裂,表现为韧性。同时,由于高分子链的运动所引起的内耗可以吸收一部分冲击能,因此凡是在常温下具有较大的与主链有关的松弛转变或者说内耗比较大的聚合物,其冲击强度较高。 总之,在使用简支梁冲击试验机时其冲击强度与聚合物分子的化学键强度和松弛特性有关,也与结晶、取向和增强增韧等聚合物聚集状态有关。
[color=#ff57ac][size=4]国内首个电动汽车充电设施实验室投运 [color=#000000]本报讯 记者昨日获悉,近日,由国家电网所属中国电科[/color][/size][/color][color=#000000][size=4]院建设的国内首个电动汽车充电设施实验室顺利投运。 [/size][/color][color=#000000][size=4] 该实验室由3座电动汽车充电站和1个充电监控中心构成,[/size][/color][color=#000000][size=4]结合国家电网公司已建成的国家电网计量中心和电池特性实验[/size][/color][color=#000000][size=4]室的科研资源,在电动汽车充电设备、充电监控信息网络、充[/size][/color][color=#000000][size=4]电设施电能计量、动力电池组等方面具备了完整的试验研究能[/size][/color][color=#000000][size=4]力,将重点开展电动汽车充电技术研究和设备、电动汽车与智[/size][/color][color=#000000][size=4]能电网双向能量转换等研究,进行电动汽车充电设施标准制定[/size][/color][color=#000000][size=4]、设备检测、政策研究等,收集试验运行数据,为电动汽车充[/size][/color][color=#000000][size=4]电设施建设及产业化发展提供有效的实验平台。[/size][/color][size=4]来源: 证券时报 /摘自《金融界》[/size]
手动液压万能试验机主要是改进了现有技术液压试验机的构造繁杂,体积大,成本昂贵的问题。它是将现有技术的电动液压式万能试验机的电动液压系统改为手动液压油泵,再配置框架、活塞缸、换向阀、压力显示仪表构成。兼有拉伸、压缩二种试验功能,尤其可对设备及其构件内部进行“腹腔内”的不可拆卸部件进行强度检测。具有不用电力,结构简单,便于携带,成本低廉的优点。液压源包括油箱、油泵和电机,油泵的出油口连接有试验机油缸油路和试验机液压夹紧装置油路,试验机油缸油路上设有并联的回油阀和送油阀,试验机液压夹紧装置油路上设有多路换向的电磁阀。省去了高压滤油器和单向阀,使其结构得到简化,降低了生产成本,并且减少系统内的压力损失,能保证运行可靠和性能稳定;夹具为万能试验机的上夹具,包括框形夹持架,夹持架上端设置连接液压万能试验机的连接柱;夹持架的下端横梁上设有适配夹持管件的夹孔。还可在夹持架的下端横梁上设置适配夹持管件的变径管接头;变径管接头上有可变径的管孔。试验管件的下端用万能试验机开口夹具夹紧。由于采用适配试验管件的夹持架,并在夹持架的下端横梁上设置适配夹持管件的变径管接头,能使试验管件的台阶式接头与本夹具很好相配合,使其固定在夹具上面,进行拉脱试验。从而准确的得到管件的拉脱强度及相关性能参数。且无需更换夹具就适用与各种大小管径的管件。具有结构简单、使用方便、准确高效、通用性强等特点。







 我要推广仪器
我要推广仪器
 下载APP
下载APP