什么是能力验证测量项目矩阵表?
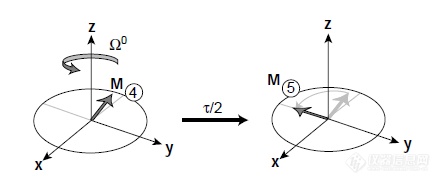
http://ng1.17img.cn/bbsfiles/images/2012/09/201209081116_389388_2071539_3.jpg上图是核磁序列中一个非常常见的单元——自旋回波的脉冲序列。我将以这一脉冲为例,通过追踪这一过程中密度矩阵的变化来向大家展示这一序列的特殊之处。①时刻自旋系统处在平衡状态,经过了(π/2)x脉冲后密度矩阵变化如下http://ng1.17img.cn/bbsfiles/images/2012/09/201209081117_389389_2071539_3.jpg为了简化讨论,我们将密度矩阵的”population parts”省略,因为这一部分自始自终没有转化为可以被核磁所检测到得相干信号。自此,根据之前的推导,经历了τ/2时间后(②-③时刻)的密度矩阵变化及图形化表示如下http://ng1.17img.cn/bbsfiles/images/2012/09/201209081120_389392_2071539_3.jpghttp://ng1.17img.cn/bbsfiles/images/2012/09/201209081120_389393_2071539_3.jpg时刻③,(π)y脉冲的激发使得密度矩阵变化如下http://ng1.17img.cn/bbsfiles/images/2012/09/201209081121_389394_2071539_3.jpghttp://ng1.17img.cn/bbsfiles/images/2012/09/201209081121_389395_2071539_3.jpg再经历了同样的τ/2时间后,时刻⑤的密度矩阵最终转化为http://ng1.17img.cn/bbsfiles/images/2012/09/201209081122_389396_2071539_3.jpghttp://ng1.17img.cn/bbsfiles/images/2012/09/201209081123_389397_2071539_3.jpg此时我们惊喜地发现,最终检测到得核磁信号S(τ, Ω)峰强度仅与时间τ以及T2弛豫时间有关,而与信号的相对频率Ωo无关——即外磁场强度无关。这样,我们就可以忽略掉外磁场不均匀所引起的谱线不均匀增宽效应,从而得到真实的λ即得到T2的值。
请问什么是有源矩阵啊?所谓有源、无源是什么意思呢? 谢谢!
什么叫矩阵匹配,干扰矫正的方法有哪些?
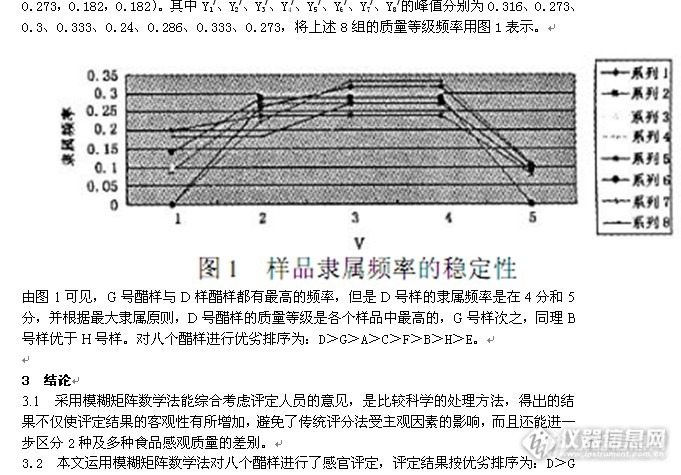
E。应用数学法进行感官评定在一定程度上比单纯性的描述性更能克服个人喜爱、偏爱所带来的蔽端,更科学、合理化。对食品的感官评定有一定的借鉴作用。关键词:模糊数学矩阵法;感官评定;食醋 食醋是我国传统的一种调味品,它是以粮食、糖类或酒糟等为主要原料经发酵而成的。酿造食醋品种虽因选料和制法不同,感官评定也有一定的差异,但总的来说,以酸味纯正、香味浓郁、色泽鲜明者为佳。经过人体长期实践体验和专家们研究证明,长期食用酿造食醋对人体的健康有一定的益处。模糊数学矩阵法是用精确的数学矩阵方法来处理无法用数字精确描述的模糊概念或事物。模糊数学评判方法较适宜于评价因素多、结构层次多的对象系统,已经应用于模糊控制、模糊识别、模糊聚类分析、模糊决策、模糊评判、系统理论、信息检索等各个方面,在食品的感官评定中也得到了广泛的应用。食醋的感官指标主要是食醋的香气、色泽、滋味和体态,很难有一个统一的标准对其进行评价,也不能得到一个客观的评价结果,因此,本文采用模糊数学矩阵法对食醋进行感官评定,减少感官评定的主观因素,主要目的是为食醋的感官评定提供一种比较科学有效的方法。1 材料与方法1.1 材料与工具食醋:市售,编号为A、B、C、D、E、F、G、H感官评定的工具主要有量筒、杯子。1.2 感官评定的方法由10名从事食品专业人员组成评定小组,对食醋的色泽、香气、滋味、体态四个因素以四分制评定标准进行感官评定,GB18187-2000将食醋的感官分为四个等级见表1。要求感官评定人员在评定前12h不喝酒,不吸烟,不吃辛辣等刺激性食物,每感官评定一个样品后,要以清水漱口并间隔10min再感官评定下一个样品,然后填好评分表并签名。全部评定结束后,收集评定人员的评定表,进行统计分析。对于每个因素的质量等级及对应分数按优(5分),好(4分),较好(3分);一般(2分),差(1分)打分评定。http://ng1.17img.cn/bbsfiles/images/2012/12/201212091349_411152_2166779_3.jpg以色泽、香气、滋味、体态为因素集,以优、好、较好、一般、差为评语集,建立4个单因素评价矩阵,用模糊矩阵数学评价方法对其进行分析。1.3.1 食醋的评定因素权重的确定权重集X=,即色泽20分,香气30分,滋味40分,体态10分,共100分。1.3.2 模糊关系综合评判集模糊关系综合评判集Y=X·A,其中X为权重集,A为模糊矩阵。2 结果与分析[/size
新手,要做指纹图谱,刚接触spss软件,没有基础,请教老师如何用spss软件得到相关系数的相似矩阵和夹角余弦的相似矩阵?请告诉我每一步如何操作?谢谢!就是如下表格峰号S1S2S3S4S5S6S7S8S9S10平均值10.0810.0860.0740.0910.0890.0910.0800.0900.0600.0960.08420.1700.0930.1230.1210.1130.1030.1080.1130.2160.2670.14330.0310.0180.0240.0230.0220.0210.0210.0220.0400.047[font=Times New Roman
康耐视推出固定式数据矩阵校验器...用于DPM和打印代码的准确和合规验证全球领先的机器视觉系统,视觉传感器和工业ID读取器供应商康耐视公司。今天宣布推出全新的DataManTM 100V验证器。代码质量对于实现成功部件可追溯性所需的读取速率至关重要。DataMan 100V验证器检查Data MatrixTM代码的质量,以确保只有标记良好的部件才能进入制造和供应链。越来越多的汽车,航空航天,包装,电子,医疗保健和国防行业的公司需要进行验证,以符合要求标记达到一定质量水平的合同。其他人则使用验证来确定标记站的过程控制,以确保最高的读取率并最大限度地减少制造过程中的废品和停机时间。 “DataMan 100V为固定式验证器设定了新的价格和性能标准,”康耐视ID产品高级总监兼业务部经理Carl Gerst说。 “它们易于使用,包括自动生成报告,非常适合MIL-STD合规性应用。”DataMan 100V可测量标签并将零件标记质量指向所有行业标准,包括自动识别和移动协会(AIM)直接零件标记(DPM)质量指南,该指南可确保不同验证平台,制造环境和行业的一致结果作为ISO15415和AS9132。DataMan 100V现已上市,可轻松集成到打标,标签或其他类型的设备中,或作为合同合规性应用的完整交钥匙解决方案。[color=#ffffff][b]文章来源:康耐视视觉传感器 http://www.china-cognex.com/[/b][/color]
我所了解的关于Mie氏光能矩阵中 系数an和bn的计算主要有正向递推、反向递推、连分式或者相结合等方法。他们之间的差别很大吗?对计算的M矩阵有很大影响吗?看了一些文献的介绍,觉得没有特别大的影响吧
试验室管理岗位中的矩阵应用都有哪些?
谁知道自旋F=3对应的矩阵表示.即Sx,Sy, Sz.
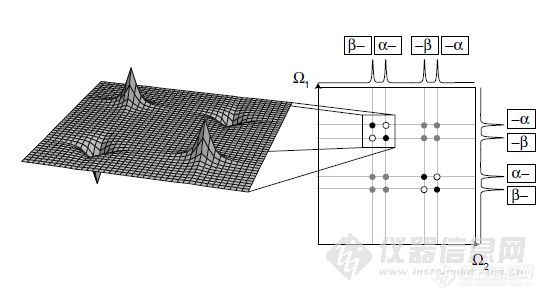
对于刚接触核磁实验的初学者,二维核磁是一种非常神秘的东西。用“激发——跃迁”还能稍稍理解一维谱图的产生,但是对于二维实验,无论是用“激发——跃迁”还是bloch球都很难理解其谱图产生的原因,更不用说二维信号的内在意义了。而所有核磁实验中,COSY是具有历史意义的第一个二维实验,Ernst还因此获得了1991年的诺贝尔奖。在知晓了核磁信号产生的原因和密度矩阵演化的一些简单规律后,我将以COSY作为例子,向大家展现简单二维核磁序列的原理。如果大家对COSY的谱图解析不是很了解的话,可以参照我之前的“核磁实验专贴-以单一化合物为例向您呈现数十种核磁实验及谱图”帖子来做一个了解。在梯度场产生之前,许多二维实验都是通过相循环来进行相干路径的选择。所谓相循环,是指在核磁序列中的某些关键点的激发脉冲相位或者检测器相位循环地改变。下面这一脉冲是普通COSY在相循环某一阶段中的脉冲序列http://ng1.17img.cn/bbsfiles/images/2012/09/201209112111_390285_2071539_3.jpg假设AX系统处在平衡状态①,在第一个(π/2)x脉冲过后,密度矩阵变化如下http://ng1.17img.cn/bbsfiles/images/2012/09/201209112111_390286_2071539_3.jpg为了与相循环的其他阶段相区分,我们将这里的密度矩阵标记为ρcos,因此http://ng1.17img.cn/bbsfiles/images/2012/09/201209112112_390287_2071539_3.jpg这之后,在t1时刻内AX系统密度矩阵自由演化,正如前面讨论的那样,这里的自由演化需要考虑到I1化学位移Ω1t1,I2化学位移Ω2t2以及I1与I2耦合πJ12的影响http://ng1.17img.cn/bbsfiles/images/2012/09/201209112120_390303_2071539_3.jpg之后密度矩阵被(π/2)x脉冲转化如下http://ng1.17img.cn/bbsfiles/images/2012/09/201209112120_390302_2071539_3.jpg由于NMR只能直接检测到-1量子相干,如果大家感兴趣可以将上式中每一个算符用前面讲的构建方法转化成矩阵,含有-1量子相干的下面四项被保留下来http://ng1.17img.cn/bbsfiles/images/2012/09/201209112119_390301_2071539_3.jpg这样,相循环的一个阶段结束了。在下一个阶段,脉冲序列如下http://ng1.17img.cn/bbsfiles/images/2012/09/201209112119_390300_2071539_3.jpg与前一个阶段相比,第一个(π/2)脉冲的相位为-y,我们将这个阶段的密度矩阵表示为ρsin。在经过了与+x相同的过程后我们得到http://ng1.17img.cn/bbsfiles/images/2012/09/201209112118_390299_2071539_3.jpg为了简单起见,我们仅以四项中的-2I1zI2y作为研究对象,即http://ng1.17img.cn/bbsfiles/images/2012/09/201209112117_390296_2071539_3.jpg根据三角函数积化和差,我们得到http://ng1.17img.cn/bbsfiles/images/2012/09/201209112121_390304_2071539_3.jpg这里简单介绍一种二维谱图的信号处理方法States,这一处理的目的是为了在二维谱图中得到纯的吸收线型。对于诸如http://ng1.17img.cn/bbsfiles/images/2012/09/201209112122_390305_2071539_3.jpg这样的形式,我们先对t2做傅里叶变换http://ng1.17img.cn/bbsfiles/images/2012/09/201209112122_390306_2071539_3.jpg此时我们得到谱图http://ng1.17img.cn/bbsfiles/images/2012/09/201209112123_390307_2071539_3.jpg同样的,我们对http://ng1.17img.cn/bbsfiles/images/2012/09/201209112123_390308_2071539_3.jpg的t2傅里叶变换得到http://ng1.17img.cn/bbsfiles/images/2012/09/201209112123_390309_2071539_3.jpg如果大家还有印象的话,在前面“”帖子中提到了核磁信号的正交检测得到的sin,cos可以通过欧拉公式化为复数形式。因此我们可以按照如下规则构建“杂交”方程http://ng1.17img.cn/bbsfiles/images/2012/09/201209112124_390310_2071539_3.jpg这一方程的数学表示为http://ng1.17img.cn/bbsfiles/images/2012/09/201209112124_390311_2071539_3.jpg此时对t1做傅里叶变换得到http://ng1.17img.cn/bbsfiles/images/2012/09/201209112125_390312_2071539_3.jpg取这一结果的实部我们得到了纯的吸收谱图http://ng1.17img.cn/bbsfiles/images/2012/09/201209112125_390313_2071539_3.jpghttp://ng1.17img.cn/bbsfiles/images/2012/09/201209112126_390314_2071539_3.jpg回到我们COSY的例子中。我们经过上述States的变换,最终得到谱图http://ng1.17img.cn/bbsfiles/images/2012/09/201209112127_390315_2071539_3.jpg其中横向的被称为直接维,对应States变换中的t2。这部分即-2I1zI2y中的α-,β-分别对应Ω2+πJ12和Ω2-πJ12,因此上图中方框内横向在Ω2 ±πJ12的化学位移处有信号;而经过了States构造后的t1的FT变换,使得纵向Ω1 ±πJ12处均有信号。横向的Ω2 ±πJ12与纵向Ω1 ±πJ12相交叉,最终得到了图中方框内的四个点,这正是COSY信号的来源!
GC/MS的二维矩阵数据怎么导出来,听说这个数据是需要解码的,应该打不开,但是化学计量学用来谱图解析就需要这些数据啊,请大侠们指点,非常谢谢!
荷兰帕纳克公司的PIXcel矩阵探测器的价格???有人知道不?欢迎回帖呀,大概价格也行啊!
平行因子算法PARAFACx[sub]ijk[/sub] = ∑a[sub]if[/sub]b[sub]jf[/sub]c[sub]kf[/sub] + e[sub]ijk[/sub]式中x[sub]ijk[/sub]为激发波长i、发射波长j时的荧光强度,a、b、c分别是激发波长、发射波长和浓度。如何将下列数据构建为EEM数据矩阵?荧光激发-发射光谱EEM数据浓度1:样品A 0.001M, 样品B 0.001M--2302352403002.4175.952.9513012.4426.4572.4633023.8077.584.4543035.2318.6315.029(第一行是激发波长,第一列是发射波长,其他为荧光强度)浓度2:样品A 0.001M, 样品B 0.002M--2302352403003.2286.2362.7183012.1746.7873.9583023.2557.7664.3073034.6778.7915.484
《化学通报》 1984年08期 用微计算机做分子简正振动分析 Ⅰ.GF矩阵法杨小震 【摘要】:正 红外光谱和拉曼光谱广泛应用于物质的结构研究及材料的性能研究,而振动谱带的归属工作是这些研究工作之首,进行分子振动的简正坐标分析是十分必要的。由于该分析过程计算复杂,不借助于电子计算机难以胜任,没有一个通用的程序也难以实施。我国从事振动光谱研究工作者多年来苦于缺乏得力的分子振动简正坐标分析工具之烦,已由1980年以来移植与输入日本与加拿大的分子简正振动计算程序而基本消除。然而,大型计算机昂贵的机时费用,使许多人望而生畏或浅尝辄止。为了推动国内简正振动分析工作的普及,本工作把自己编写的一套分子简正振动分【作者单位】: 中国科学院化学研究所 【关键词】: 振动分析 微计算机 分子振动 简正振动 力常数 简正坐标分析 拉曼光谱 振动光谱 红外光谱 基本消除
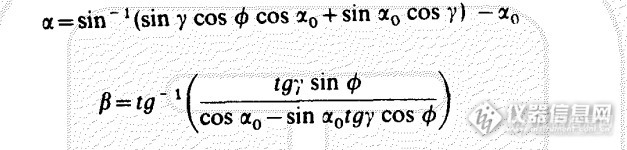
求各位大师们帮忙分析一下:φ是怎么求来的?是这样的,有的纳米颗粒,小于10nm,出不了菊池线,没法用菊池线来进行旋转。比如我想从,转到,双倾台的α和β角只能慢慢的试,这个过程有点麻烦。通过查找文献发现:在三坐标系中,双倾台的T1和T2轴分别对应α和β角,T1和X轴平行,T2位于YOX面上(如下图)http://ng1.17img.cn/bbsfiles/images/2012/12/201212311002_417594_2162238_3.png。这两个晶带轴的共有晶面(H0 K0 L0)以及两个晶带轴的方向之间的夹角γ是可以推算的,T1轴的初始位置α0是可以从样品台上读出来的,φ是指两晶带轴的共有晶体学面(H0 K0 L0)的法线和X轴间的夹角。然后我需要操作的角度α和β角可以写成γ,α0和 φ的函数(如下图),http://ng1.17img.cn/bbsfiles/images/2012/12/201212311003_417599_2162238_3.png如果知道了这三如果知道这三个数值,α和β就可以直接算出来,这样我如果想从晶带轴转到,就不用一个一个角度的试着转了,而是直接从转到相应的角度就好了。现在问题是,我不知道这个 φ是怎么求来的,文献上说,"只倾转T1轴时引起的菊池极的移动轨迹与T1轴方向的投射垂直,从而可以在荧光屏上确定在一定相机长度下X轴的投射位置和方向。这样可以在荧光屏上确定晶面(hkl)的法线与X轴之间的夹角 φ."这句话是什么意思啊相关文献是:“透射电镜样品台操作过程的矩阵分析,姚越,刘庆,哈尔滨工业大学”,1992年12月,兵器材料科学与工程,第15卷,第12期Tambuyser P. A simple method for the direct measurement of diffraction patterns in the EM 400T transmission electron microscope.这是相关连接:http://iopscience.iop.org/0022-3 ... 0022-3735_16_6_010.http://file.lw23.com/3/31/310/31 ... cd-2eb24ce09ead.pdf

JDSU偏振相关损耗万用表是最快最准确的万用表。是测量单模光纤偏振相关损耗组件,使用内部激光或外部光源。万用表测量被测器件在四种独立输入极化状态下的损耗。使用穆勒矩阵计算所有极化状态下的PDL和平均损耗,根据IEC(613)00-3-12国际标准化。万用表在测量时容易快速地切换测量PDL和插入损耗(IL)到测量回波损耗(RL)或功率,在不到两秒钟内同时测量和显示PDL和IL 。万用表具有精密的光学设计,补偿内部光功率的变化参考探测器。设计确保准确损失无论源功率或输入光通过偏振的耦合效率状态控制器。集成的PDL标准源是特别方便验证仪表的校准。还可选择外部可调谐激光或两个固定激光源用于各种波长测量。万用表是理想的对于PDL敏感组件,如隔离器、DWDMS、光纤布拉格光栅(FBG)、光学循环器、开关、衰减器,耦合器和其他具有高测试精度和最佳生产速度至关重要。有两种型号:一种内部激光源型号以及双内部激光源型号。内部激光器可用于单个内部激光源:980、1310、1480,1550、1625或1650nm。双内部激光源是提供1310/1550、1550/1625、1550/1650、1480/1550nm。其他配件,如也提供探测器适配器和混合跳线。主要特点和优点:使用Mueller方法从PDL和IL到RL测量值的快速变化测量只需几秒钟同时显示IL和PDL外部可调光源能力GPIB和RS232远程控制综合PDL标准源符合CE要求外加UL3101-1和CAN/CSA-C22.2第1010.1号应用:无源元件鉴定光衰减器规格光开关规格[img=,521,653]https://ng1.17img.cn/bbsfiles/images/2019/04/201904020948360817_5476_3388456_3.png!w521x653.jpg[/img][img=,690,289]https://ng1.17img.cn/bbsfiles/images/2019/04/201904020948340657_9595_3388456_3.png!w690x289.jpg[/img]
超声波并不是测量机器人与物体间距离的唯一方法,也可以利用红外线。和超声波测量不同,红外线距离传感器不会去探测线光束的传播时间。因为对于我们感兴趣的距离,传输时间为10—15—10-12秒数量级。只有那些极为昂贵的电路才能应付这样的速度。红外线系统采用所谓视差技术。即测量已知光源和它的反射光束之间的反射角。它的工作方式是:红外线光束照射在一个场景上。光束经过传感器前的物体反射后。再照射到传感器。物体越接近,由于视差引起的角度变化就越大。反射光束照在一个非常小的线性光检测器矩阵上。光检测器矩阵连接分析物体距离的电路。这个电路可以提供数字或模拟输出。
GC-MS怎么提取横坐标是保留时间,纵坐标是mass to charges(m/z)的二维矩阵数据,谢谢!
40个GC-MS样品数据,怎么样轻松做成能诠释每一样品信息的40×(。。。)矩阵呢?希望大家帮忙
深圳明准医疗科技有限公司(简称:明准医疗)于2023年5月完成首轮融,苏州比邻星创投领投了天使轮融资,融资金额逾千万元。明准医疗以前沿光学显微成像技术的首次临床应用为核心使命的创新型医疗器械公司。明准团队有着丰富的生物光学技术及组织成像应用经验,通过突破性的新型光学显微成像技术,开发国际领先的新型数字病理技术平台,打造高端创新型组织病理成像仪器矩阵。明准医疗将在临床医疗器械、高通量药物筛选以及科研仪器领域布局,成为国内领先,国际一流的光学显微仪器企业。中国科学院深圳先进技术研究院副院长、国创中心主任郑海荣院长在签约仪式上曾表示明准医疗是国创中心成功孵化的最有潜力的优质企业之一,作为国家级制造业创新中心,国创中心将为明准医疗持续提供技术和资源支持,实现国产高端医疗器械的突破和成长。比邻星创投合伙人李喆指出,比邻星创投持续关注全球创新科技在医疗健康领域的应用。明准医疗是比邻星非常重视的交叉学科创新应用,其团队具有多学科交叉的复合经验,将世界领先前沿的生物医用光学成像技术首次应用于组织病理临床诊断领域,打造全球领先的创新医疗设备。比邻星坚定看好明准医疗在医疗器械领域的领先布局和突破进展,将为其提供充足的临床和产业资源,给与全面的支持和赋能。[来源:仪器信息网] 未经授权不得转载[align=right][/align]
ICH指导原则分享-Q1d 新原料药及其制剂的稳定性试验中扩号法和矩阵化设计的应用Q1DBracketing and matrixing designs for stabilitytesting of drug substances and drug productsStep 2 9 November 2000
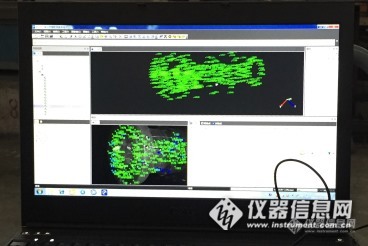
联系人:吕红明联系方式:13812688974qq:9858592441 XTDP三维光学摄影测量系统1.1 系统介绍 http://ng1.17img.cn/bbsfiles/images/2016/07/201607191113_601128_3024107_3.pnghttp://ng1.17img.cn/bbsfiles/images/2016/07/201607191113_601129_3024107_3.png 图:XTDP系统硬件 图:系统软件界面XTDP三维光学摄影测量系统,使用普通单反相机(非量测相机),通过多幅二维照片,基于工业近景摄影测量原理,重建工件表面关键点三维坐标。用于对中型、大型(几米到几十米)物体的关键点进行三维测量。与传统三座标测量仪相比,没有机械行程限制,不受被测物体的大小、体积、外形的限制,能够有效减少累积误差,提高整体三维数据的测量精度。可以代替传统的激光跟踪仪、关节臂、经纬仪等,而且没有繁琐的移站问题,方便大型工件测量。系统主要由高性能单反相机、编码标志点、非编码标志点、标尺、计算机及检测分析软件等组成。http://ng1.17img.cn/bbsfiles/images/2016/07/201607191113_601130_3024107_3.png图:摄影测量原理1.2 系统特色l 国内首个自主研发的工业近景摄影测量系统l 高精度的相机标定算法,适用于多种数码相机l 自主知识产权的核心算法,达到国外先进水平l 测量范围大:可测量0.3m~30m范围的物体l 测量精度高:最高精度可达±0.015mm/ml 测量速度快:拍照方便快速,计算速度快,测量结果三维可视化l 具备CAD数模对比模块,可用于质量检测l 具备静态变形测量模块,可测量工件变形数据l 操作方便:设备不需要事先校正,使用方便,对操作人员无特殊要求l 适应性强:不受环境及测量范围限制,可在车间或工业现场测量l 便携式设计:设备轻便,单人可携带外出开展测量工作1.3 系统功能系统采用近景摄影测量技术,在被测物体上放置编码点及非编码点,通过单反相机围绕被测物体拍摄多张被测物图像,快速检测被测物表面关键的三维坐标、三维位移数据,测量结果三维彩色显示。系统功能主要包括基本测量功能、变形测量功能、数模对比功能、分析报告功能等。具体功能如下:(1)基本测量功能:测量幅面:支持几十厘米到几十米的测量幅面测量相机:支持多种单反、工业相机图像计算※相机数目:支持单个相机或多个相机图像同时计算,提高大型工件的测量效率※相机标定:软件具备相机自标定功能,支持多种相机镜头畸变模型计算模式:具备自动计算和自定义计算两种模式,方便用户灵活操作※标志点类型:支持10、12、15位编码点,支持黑底白点、白底黑点,更多类型可定制※变形测量功能:通过多次测量不同变形状态下的观测标志点三维坐标,可以进行关键点三维变形偏差计算和色谱图分析※数模对比功能:可以对被测工件与CAD数模进行三维几何形状比对测量结果:包含三维坐标、三维位移等数据,测量结果三维显示显示设置:三维显示可灵活设置,包括颜色,尺寸等,可显示相机三维位置※厚度补偿:具备编码点及非编码点厚度自动补偿功能多工程测量:系统软件支持多工程计算、显示及分析※多核加速:多核CPU并行运算,提高系统解算速度支持系统:同时支持32位、64位系统(2)变形测量功能:参考模式:基准状态可任意设置,可以是首个状态或者中间状态对齐模式:支持ID转换、相对关系转换、手动转换等多种状态对齐模式搜索深度:支持任意指定标志点搜索半径及搜索深度,提高标志点追踪稳定性分析模式:支持多观察域分析,观察域自由选择测量结果:包含X,Y,Z三维位移分量及总位移E结果显示:位移测量结果在三维视图和图像中以射线和色谱形式绘制,真实表达三维点的变形与运动,显示效果可灵活设置(3)数模对比功能:※数模导入:支持stl,iges,step等多种数模文件格式※分析模式:支持多观察域分析,观察域自由选择检测结果:包含X,Y,Z三维偏差分量及总偏差E结果显示:三维彩色矢量箭头直观显示偏差结果,显示效果可灵活设置(4)分析报告功能:坐标转换功能:321转换、参考点拟合、全局点转换、矩阵转换等多种坐标转换功能※元素创建功能:三维点、线、面、圆、槽孔、矩形孔、球、圆柱、圆锥※分析创建功能:点点距离、点线距离、点面距离、线线夹角、线面夹角、面面夹角屏幕截图功能:具备二维图像及三维图像截图功能,截图自动插入报告数据输出功能:测量结果及分析结果输出成报表,支持TXT,XLS,DOC文件的输出(5)扩展接口※系统扩展:可配合XTOM型三维光学面扫描系统使用,提高大型工件的拼接精度1.4 技术指标 指标名称技术指标1. 核心技术工业近景摄影测量2. ※测量结果三维坐标、三维位移3. 测量幅面支持几十厘米到几十米的测量幅面4. 测量相机支持多种单反、工业相机图像计算5. ※相机数目支持单个相机或多个相机图像同时计算,提高大型工件的测量效率6. 相机标定软件自标定,支持多种相机镜头畸变模型7. 测量精度最高±0.015mm/m8. ※标志点类型支持10、12、15位编码点,支持黑底白点、白底黑点,更多类型可定制9. ※静态变形分析通过多次测量不同变形状态下的观测标志点三维坐标,可以进行关键点三维变形偏差计算和色谱图分析;位移测量结果在三维视图中以射线和色谱形式绘制,真实表达三维点的变形与运动10. ※三维数模对比可以对被测工件与CAD数模进行三维几何形状比对,快速方便地进行大型工件的产品外形质量的检测支持stl,iges,step等多种数模文件格式,对比结果三维彩色显示11. ※厚度补偿功能具备编码点及非编码点厚度自动补偿功能12. ※坐标转换功能321转换、参考点拟合、全局点转换、矩阵转换等多种坐标转换功能13. ※元素创建功能可以创建三维点、线、面、圆、槽孔、矩形孔、球、圆柱、圆锥等多种三维元素14. ※分析创建功能可以创建点点距离、点线距离、点面距离、线线夹角、线面夹角、面面夹角等多种分析15. ※多核加
为贯彻《中华人民共和国环境保护法》《中华人民共和国大气污染防治法》等法律法规,规范环境空气颗粒物来源解析工作,我部组织编制了《环境空气 颗粒物来源解析 正定矩阵因子分解(PMF)模型计算技术指南》等四项国家生态环境标准。 目前,标准编制单位已编制完成标准的征求意见稿,按照《国家环境保护标准制修订工作管理办法》相关规定,现公开征求意见。标准相关资料可登录我部网站(http://www.mee.gov.cn/),在“意见征集”栏目或首页搜索栏输入本通知名称检索查阅。 各机关团体、企事业单位和个人均可提出意见和建议。请于2022年11月29日前将书面意见反馈我部大气环境司,意见电子版发送电子邮箱。 联系人: 生态环境部大气环境司张宇哲 电话: (010)65645563 传真: (010)65645567 邮箱: daqichu@mee.gov.cn [b]附件:[/b] 1.征集意见单位名单 [url=https://www.mee.gov.cn/xxgk2018/xxgk/xxgk06/202210/W020221031444443694258.pdf]2.环境空气 颗粒物来源解析 正定矩阵因子分解(PMF)模型计算技术指南(征求意见稿)[/url] [url=https://www.mee.gov.cn/xxgk2018/xxgk/xxgk06/202210/W020221031444444296497.pdf]3.《环境空气 颗粒物来源解析 正定矩阵因子分解(PMF)模型计算技术指南(征求意见稿)》 编制说明[/url] [url=https://www.mee.gov.cn/xxgk2018/xxgk/xxgk06/202210/W020221031444445825868.pdf]4.环境空气颗粒物来源解析 化学质量平衡(CMB)模型计算技术指南(征求意见稿)[/url] [url=https://www.mee.gov.cn/xxgk2018/xxgk/xxgk06/202210/W020221031444446730446.pdf]5.《环境空气颗粒物来源解析 化学质量平衡(CMB)模型计算技术指南(征求意见稿)》 编制说明[/url] [url=https://www.mee.gov.cn/xxgk2018/xxgk/xxgk06/202210/W020221031444453428426.pdf]6.环境空气 颗粒物来源解析 基于受体模型法的源解析技术规范(征求意见稿)[/url] [url=https://www.mee.gov.cn/xxgk2018/xxgk/xxgk06/202210/W020221031444453972921.pdf]7.《环境空气 颗粒物来源解析 基于受体模型法的源解析技术规范(征求意见稿)》 编制说明[/url] [url=https://www.mee.gov.cn/xxgk2018/xxgk/xxgk06/202210/W020221031444454652887.pdf]8.环境空气 颗粒物来源解析 受体模型法监测数据处理与检验技术规范(征求意见稿)[/url] [url=https://www.mee.gov.cn/xxgk2018/xxgk/xxgk06/202210/W020221031444455114003.pdf]9.《环境空气 颗粒物来源解析 受体模型法监测数据处理与检验技术规范(征求意见稿)》 编制说明[/url][align=right] 生态环境部办公厅[/align][align=right] 2022年10月26日[/align] (此件社会公开) [b] 附件1[/b][align=center] [b]征求意见单位名单[/b][/align] 1.各省、自治区、直辖市生态环境厅(局) 2.新疆生产建设兵团生态环境局 3.各省、自治区、直辖市生态环境监测站(中心) 4.新疆生产建设兵团生态环境第一监测站 5.各环境保护重点城市生态环境监测站(中心) 6.中国环境科学研究院 7.中国环境监测总站 8.生态环境部环境发展中心 9.生态环境部南京环境科学研究所 10.生态环境部华南环境科学研究所 (部内征求法规司、监测司、执法局意见)
型号:VK1629 品牌:永嘉微电/VINKA 封装:LQFP44年份:新年份 工程服务,技术支持 (C96-15)[img=,450,419]https://ng1.17img.cn/bbsfiles/images/2024/04/202404151022222696_1848_6207987_3.png!w450x419.jpg[/img]VK1629是一种带键盘扫描接口的数码管或点阵LED驱动控制专用芯片,内部集成有4线 串行接口、数据锁存器、LED 驱动、键盘扫描等电路。SEG脚接LED阳极,GRID脚接LED阴 极,可支持16SEGx8GRID的点阵LED显示面板,最大支持8x4按键矩阵。适用于冰箱、空 调、家庭影院等产品的高段位显示屏驱动。采用LQFP44的封装形式。? 工作电压 3.0-5.5V? 内置RC振荡器? 16个SEG脚,8个GRID脚? SEG脚只能接LED阳极,GRID脚只能接LED阴极? 最大支持8x4矩阵按键(按键/显示复用需硬件电路配合)? 4线串行接口? 8级整体亮度可调? 内置显示RAM为16x8位? 内置上电复位电路? 封装 LQFP44(10.0mm x 10.0mm PP=0.8mm)[img=,520,407]https://ng1.17img.cn/bbsfiles/images/2024/04/202404151022445940_9325_6207987_3.png!w520x407.jpg[/img](永嘉微电/VINKA原厂-FAE技术支持,主营LCD驱动IC; LED驱动IC; 触摸IC; LDO稳压IC; 水位检测IC)LED驱动、LED屏驱动、数显驱动IC、LED芯片、LED驱动器、数码管显示驱动、LED显示驱动、LED数显驱动原厂、LED数显驱动芯片、LED驱动IC、点阵LED显示驱动、LED屏驱动IC、数显驱动芯片、数码管芯片、数码管驱动、数显屏驱动、数显IC、数显芯片、数显驱动、LED数显IC、数显驱动原厂、LED屏驱动芯片、LED数显驱动IC、LED数显驱动IC、LED驱动电路、数显LED屏驱动、LED数显屏驱动、LED显示屏驱动、LED数码管驱动、数显LED驱动、LED数显驱动、数码管显示IC、数码管显示芯片、数码管驱动芯片、LED显示驱动芯片、显示数码管驱动、LED控制电路、数显LED驱动芯片、数显LED驱动IC、LED驱动芯片、数码管显示屏驱动、数码管驱动原厂、LED驱动厂家、LED驱动原厂、LED数码驱动、LED数码屏驱动、LED数显芯片、数码管驱动IC、显示LED驱动、数码管LED驱动、LED显示IC、点阵数显驱动、点阵数码管驱动、点阵LED驱动、点阵数显驱动芯片、点阵数显驱动IC、点阵LED驱动芯片、点阵LED驱动IC、LED数显原厂、点阵数码管显示芯片、数码管驱动厂家、数显LED原厂

这是郭老师的书里的。不知道怎么来的?[img=,690,920]https://ng1.17img.cn/bbsfiles/images/2020/03/202003081206365349_1792_3033883_3.png[/img]

XTDIC三维全场应变测量分析系统,结合数字图像相关技术(DIC)与双目立体视觉技术,通过追踪物体表面的散斑图像,实现变形过程中物体表面的三维坐标、位移及应变的测量,具有便携,速度快,精度高,易操作等特点。http://ng1.17img.cn/bbsfiles/images/2016/06/201606021457_595779_3024107_3.jpghttp://ng1.17img.cn/bbsfiles/images/2016/06/201606021457_595780_3024107_3.png图:系统测量原理及散斑图像追踪过程系统组成:统主要由测量头、控制箱、标定板、标志点、计算机及检测分析软件等组成系统应该包含系统测量头(含两台高速工业相机、进口相机镜头,带万向手柄可调节LED光源)、相机同步控制触发控制箱、系统标定板、系统可移动支撑架、动态采集分析软件、载荷加压控制通讯接口、计算机系统等组成。1.1 主要应用XTDIC 三维数字散斑动态变形测量分析系统是实验力学领域中一种重要的测试方法,其主要应用有:在材料力学性能测量方面:DIC已成功应用于各种复杂材料的力学性能测试中。如火箭发动剂固体燃料、橡胶、光纤、压电薄膜、复合材料以及木材、岩石、土方等天然材料的力学性能的检测中。值得注意的是,DIC被广泛应用于破坏力学研究中,包括裂纹尖端应变场测量、裂纹尖端张开位移测量以及高温下裂纹尖端应变场测量等。在细观力学测量方面:借助于扫描电子显微镜(SEM)、扫描隧道电子显微镜(STEM)以及原子力显微镜(AFM),DIC被越来越多地应用于细观力学测量。最近,数字散斑相关方法还被应用于物体表面粗糙度的测量中。在损伤与破坏检测方面:DIC被应用于多种复杂材料,如岩石、炸药材料的破坏检测中。DIC还被应用于一些特殊器件,如陶瓷电容器、电子器件,电子封装的无损检测研究中。在生物力学测量方面:DIC被应用于测量手术复位后肱骨头在内旋转及前屈运动下大小结节的相对位移量,以及颈椎内固定器对人体颈椎运动生物力学性能的影响等。对于大中专院校的研究教学应用,本系统开展各种软组织、金属及复合材料性能测试、力学性能测试分析、有限元分析验证等研究和教学实验,具有大至1000%应变测量范围,并可以实时计算、实现动态全场的应变变形测量。在土木工程的相关研究中,如四点弯试件、半圆弧试件、悬臂梁实验,对应完整实验设计方案,以非接触式的方式提升研究手段,提高研究能力。亦可为学生提供可视化的教学工具,让学生的基础学习课程变得直观和可视,使复杂问题简单化、抽象问题直观化、隐蔽问题可视化。1.2 系统功能(1)基本测量功能:l ※测量幅面:支持几毫米到几米的测量幅面,可以根据需求定制测量幅面。l 测量相机:支持百万至千万像素、低速到高速、千兆网和Camera Link等多种相机接口,控制软件最大支持采集帧率10万 fps。l ※相机标定:支持多个相机(可多于8个)多种测量幅面的标定,支持外部拍摄图像标定。l ※测量模式:三维变形测量,同时支持单相机二维测量。l ※实时计算:采集图像的同时,可以实时进行三维全场应变计算,具备在线和离线两种计算处理模式。l 计算模式:具备自动计算和自定义计算两种模式。l 测量结果:全场三维坐标、位移、应变数据等动态变形数据,应变模式有工程应变、格林应变、真实应变等三种。l 多个检测工程:系统软件支持多个检测工程的计算、显示及分析。l ※支持系统:支持32位、64位windows操作系统,具备64位计算和多线程加速计算功能。(2)分析报告功能l ※18种变形应变计算功能:X、Y、Z、E三维位移;Z值投影;径向距离、径向距离差;径向角、径向角差;应变X、应变Y和应变XY;最大主应变;最小主应变;厚度减薄量;Mises应变;Tresca应变;剪切角。l ※坐标转换功能:321转换、参考点拟合、全局点转换、矩阵转换等多种坐标转换功能。l ※元素创建功能:三维点、线、面、圆、槽孔、矩形孔、球、圆柱、圆锥。l ※分析创建功能:点点距离、点线距离、点面距离、线线夹角、线面夹角、面面夹角。l 数据平滑功能:均值,中值,高斯滤波等多种平滑功能。l 数据插值功能:自动和手动两种数据插值模式。l 材料性能分析:自动计算材料的弹性模量和泊松比等参数。l 三维截线功能:可对三维测量结果进行直线或圆形截线分析。l 曲线绘制功能:所有测量结果均可以绘制成曲线图。l 成形极限分析功能:可绘制和编辑FLD成形极限曲线。l 视频创建功能:可将测量过程二维图像或者三维测量结果制作成视频并输出保存。l 数据输出功能:测量结果及分析结果输出成报表,支持TXT,XLS,DOC文件的输出。(3)采集控制功能l ※采集控制箱可以实现测量头的控制、多个相机的同步触发、多路模拟量和开关量数据采集、输入和输出信号控制。l 相机同步控制:多相机外同步触发信号。l ※外部采集通讯接口:支持外部载荷如微电子万能试验机等外部载荷联机采集通讯接口,通过串口通讯或者模拟量实时采集外部的加载力、位移等信号,并与三维全场应变测量数据实现同步,实现应力和应变数据的融合和统一。l 光源控制:可以实现测量过程中不同补光需要的LED光源控制。(4)预留扩展接口:l ※多测头同步检测接口:可以支持1~8个测头的多相机组同步测量,相机数目任意扩展,可以同步测量多个区域的变形应变,适用于不同实验条件需求下的变形应变测量。l ※显微应变测量:配合双目体式显微镜,系统可以实现微小视场的三维全场变形应变检测,并可支持扫描电镜、原子显微镜等显微图像的应变数据计算。l ※大尺寸全方位变形接口:支持摄影测量静态变形系统,实现全方位变形和局部全场应变检测数据的融合和统一。1.3 技术指标 指标名称技术指标1. ※核心技术多相机柔性标定、数字图像相关法2. 测量结果三维坐标、全场位移及应变,可视化显示及测量过程的视频录制输出,测量结果及数据输出成报表,支持TXT,XLS,DOC文件的输出。3. ※测量幅面支持1mm-4m范围的测量幅面,并配备相应编码型标定板标定架,可定制更多测量幅面。4. ※测量相机支持百万至千万像素相机,支持低速到高速相机,支持千兆网和Camera Link等多种相机接口,控制软件最大支持采集帧率10万 fps)5. 相机标定简单快捷,需要可支持任意数目相机的同时标定,支持外部图像标定6. ※位移测量精度0.005像素7. ※应变测量范围0.01%-1000%8. ※应变测量精度0.001%9. 测量模式三维变形测量,可兼容二维测量10. ※实时测量计算采集图像的同时,实时进行全场应变计算11. ※系统控制2采集控制箱可以实现测量头的控制、多个相机的同步触发、多路模拟量和开关量数据采集、输入和输出信号控制。2相机同步控制:多相机外同步触发信号。2外部采
1. 同时支持IPAD平板电脑、安卓平板电脑、射频触摸屏、windows电脑控制(笔记本、台式机、一体机等),一个设计器支持所有平台,并且IPAD平板、安卓平板、射频触屏及windows电脑的控制界面完全相同,方便用户使用。多种方式,可同时使用,互为备份,让项目更健壮。中控系统,会议中控系统,多媒体中控系统,智能中控系统,IPAD中控系统,混合矩阵,高清混合矩阵,会议中控,多媒体中控2. 非网页式,各个平台(IPAD、安卓、windows)都有功能一致的专用操控软件,更显专业,易用,稳定。3. IPAD控制软件,通过美国苹果公司官方严格审核,可直接在app store上安装,确保稳定兼容,不需越狱,不需破解。4. 采用字体自动识别技术,在Windows电脑上设计界面时使用的任何字体,都能在IPAD平板、安卓平板上正确显示(不需制作图片)。5. 编程设计平台可自动生成各种3D按钮(不需设计图片);也支持图片按钮,支持PNG、WMF、ICO、GIF图片的透明效果,可实现任意形状的按钮,各种效果的界面。6. 设计平台采用先进的软件技术,不需使用任何电脑语言进行编程,不需使用各种复杂的逻辑模块与宏,以方便施工、后期维护及升级。7. 程序设计师勿需亲自到现场,可直接通过以太网络,利用Internet互联网传输来更改程序的内容。8. 专为高要求级场合设计,非电教中控改装,主机配有16个RS232串口、8个RS485\422、8个红外口、8-Relays 继电器口等控制口。不集成小矩阵等信号切换系统,增强控制接口,以降低整个系统崩溃的风险。9. 主机内置红外学习器,可把红外数据保存到电脑成为红外库文件,供后续工程或后续维护升级使用。10. 控制通讯:以太网(TCP/IP),10/100M自适应,TCP SERVER方式,也可定制为UDP方式,也可连接射频接收器。11. 处理器:双处理器。采用2颗嵌入式高速中央处理器(CPU)并行运算,可快速处理各种复杂的控制指令,提高响应用户的速
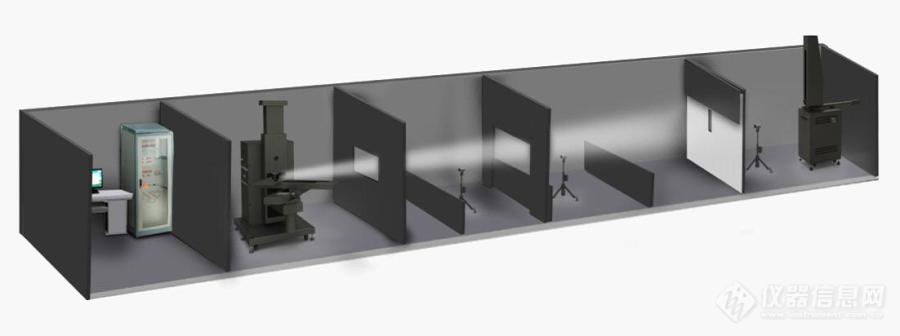
[align=center]SGS解析:CIE A-α测量系统在灯具配光测试中应用[/align][align=left]车用灯具是涉及到车辆和人身安全性的重要部件,其配光技术要求被列为汽车法规或强制性标准检测项目。[/align][align=left]目前,灯具配光测试主要是依据欧洲ECE和美国SAE两种标准体系进行,但在最新发布的2007版国标中,试验方法、项目、要求等已经和ECE法规一致。[/align][align=left]灯具配光测试,是指对灯具或者光源发射出的光在的空间分布进行测量,并显示在定义的角度位置上相对于人眼的可见光的光度特性。[/align][align=left]SGS汽车灯具实验室,采用目前国际最先进的CIE A-α测量系统进行灯具配光测试。该系统在测试过程中,探头保持静止,灯具绕垂直轴(A平面轴)和水平轴(α轴)转动,从而得到整个空间的光强分布。[/align][align=left]该系统探测器的测试距离在1.41m至11.41m之间,灯具装在可绕水平和垂直两个方向选择的转台上。[/align][align=center][img=,690,257]http://ng1.17img.cn/bbsfiles/images/2018/08/201808161613037693_7441_2883703_3.jpg!w690x257.jpg[/img][/align]在计算机控制下,电机驱动垂直/水平轴线旋转,被测灯具水平转动范围±180°,垂直转动范围±90°,角度精度最高0.01°,光度探头进行测量灯具在该平面上各个方向的发光强度。当一个平面测量完毕后,水平轴电机驱动灯具转过某一角度,然后光度探头再测量另一平面上的光强分布。通过垂直主轴连续旋转,水平轴间断运动,实现灯具在空间各个方向上的光强分布数据的测量。该测试系统,配备高精度快速光谱辐射计(实验室级),可测1μs的极快闪光全谱,0.3%的极高光度线性,到达0.01mcd的极高灵敏度,0.0015x,y的极高色坐标精度, 5.00E-05的极低杂散光水平,覆盖200nm-2550nm的极宽光谱范围。完全满足美国IESNALM-79和中国GB/T 24824等标准要求,可实现LED的瞬态光学特性测量(脉冲测量)及稳态光学特性测量(直流测量)。在该分布光度计测试系统中,被测LED产品仅绕转到中心转动,环境温度变化和周围气流都比中心旋转反射镜式分布光度计要小的多,若LED产品的散热对燃点姿态不敏感,则LED产品在这类分布光度计中的稳定性较高,能达到很高的光强分布测量精度,相应的总光通量测量精度也会较高。
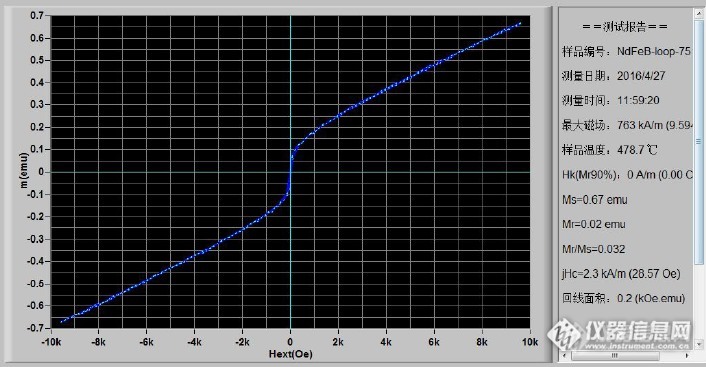
2016国产磁测量好仪器系列之二:振动样品磁测量仪器JDAW-2000D原创:王家富 工程师,吉林大学材料学院张宇冬 工程师,长春市英普磁电技术开发有限公司推荐:陆俊 工程师,中科院物理所磁学室2016年8月15日一句话推荐理由:逆境中沿袭三十多年值得铭记的国产磁性材料开路测量好仪器。一、引言现代电器电子通讯工业中几乎所有涉及发电机、电动机、变压器、集成电感等零部件的地方都会用到磁性材料,其最基本的参数大都定义在磁滞回线、退磁曲线或变温磁化曲线上,所以通常的磁性测量就是磁滞回线、退磁曲线或变温磁化曲线的测绘。自从1956年第一台振动样品磁强计(Vibrating Sample Magnetometer, VSM)面世以来,人们对其进行了很多改进。由于其具有灵敏度高、测试样品小(一般为毫克级)、制作样品方便等特点,目前已广泛应用于包括永磁材料、软磁材料、磁记录材料、弱磁材料在内的很多磁性测量领域,测量的范围涵盖了直流磁性能的全部参数以及磁滞回线(loop)、磁化强度—温度曲线(M-T curve)等,用途广泛,为材料科学研究做出了杰出贡献。VSM测量的优势是可以测量非常少量的样品,并且对样品的形状没有严格要求,各种闭路方法无法测量的样品形状,只要进行适当的退磁因子修正,都能够有效测得样品的磁特性。振动样品磁强计是目前最为常见的磁性测量仪器之一。二、背景上世纪八十年代,吉林大学物理系教授张裕普先生(英普磁电创始人)研制成功中国第一台振动样品磁强计JDM-1,并获1985 年国家科技进步3 等奖。鉴于当时的条件,该设备为手动测量型,之后,由其学生吴汉华教授在JDM-1 基础上,研发出中国第一台由计算机自动控制的振动样品磁强计JDM-13。后经多次升级改进,英普磁电与吉林大学联合研制出智能化程度更高、性能更稳定、使用更方便的JDAW2000D 系列振动样品磁强计,其外观如图1所示。http://ng1.17img.cn/bbsfiles/images/2016/08/201608241551_606485_1611921_3.png图1 JDAW2000D 型振动样品磁强计几项前身版本举例--左上:内蒙古冶金研究所VSM130 型;右上:电子科技大学VSM220 型;左下:东北大学VSM300;右下:莫斯科国家科技大学(MISiS)VSM130 型三、简介JDAW-2000D 系列振动样品磁强计由主机、电磁铁、振动头、计算机和打印机等组成,根据需要还可添加高温附件、低温附件与低磁场附件等,其中主机由微处理器控制的电磁铁电源、振动源、磁矩和磁场的测量单元等组成。图2给出了其原理框图。http://ng1.17img.cn/bbsfiles/images/2016/08/201608241552_606486_1611921_3.png 图2 JDAW-2000D 系列振动样品磁强计的总体原理框图JDAW-2000D 系列振动样品磁强计的主机与计算机之间采用标准的RS-232 串行口进行通信,提高了整机的成套性和硬件的可操作性,专用配套软件可设置系统参数,操作功能强大、使用方便。数字磁矩单元的量程、时间常数、目标磁场、数据点数等均由计算机软件控制,测量自动完成并自动保存相关测试数据。自动保存的磁滞回线、磁化曲线、热磁曲线和设定温度下的MH 曲线等数据曲线可由计算机屏幕显示或由打印机打印输出,也可使用Excel或Origin 等软件直接进行数据处理、绘图。配套软件可同时计算出国际单位制和高斯单位制下的曲线参数(饱和磁矩/饱和磁化强度/比饱和磁化强度,剩余磁矩/剩余磁化强度,矫顽力,内禀矫顽力,矩形系数,最大磁能积,回线面积)。JDAW-2000D 系列振动样品磁强计可测量磁性材料的基本磁性能(如磁化曲线,磁滞回线,热磁曲线等),得到相应的各种磁学参数(如饱和磁化强度,剩余磁化强度,矫顽力,最大磁能积,居里温度,磁导率等);可测量粉末、颗粒、薄膜、块状等形状磁性材料;可原位测量磁性材料从液氮温区到400K、从室温到500℃温区的磁性能随温度变化曲线。(取决于所选购的附件)。其主要技术指标如下:1、磁矩量程分300emu、150emu、80emu、40emu、30emu、15emu、8emu、4emu、3emu、1.5emu、800memu、400memu、300memu、150memu、80memu、40memu、30memu 和15memu(即0.015emu)共18 档,磁矩测量范围(磁极间距40mm 时)10-3emu—300emu(最高灵敏度:5×10-5emu)2、相对精度(量程3emu 时):优于±1%3、重复性(量程3emu 时):优于±1%4、稳定性(量程3emu 时):预热半小时,连续4 小时工作优于1%5、温度范围:室温到500 摄氏度以及室温到液氮温区(取决于所选购的附件)6、最高磁场强度:0.8T—3.2T 之间(取决于所选购具体型号)四、验证关于振动样品磁强计的国际间比对已经有IEC-TC68(磁合金与磁钢委员会)进行过,比对结果表明当前国际范围内使用振动样品磁强计测量磁性材料具备较良好的复现性,这里不再赘述。本文仅讨论JDAW2000D系列振动样品磁强计本身的技术性能。振动样品磁强计一般使用四线圈结构的探测线圈测量样品的磁矩,而探测线圈的灵敏度系数与样品在探测线圈中的位置有关,当样品处于探测线圈的几何中心(鞍部区)时,样品位置和体积对灵敏度系数的影响最小。振动样品磁强计通常将直径为几毫米的纯镍球体做标准, 测试样品之前先用纯镍球进行定标。因此VSM一般主要考察重复性、稳定性与相对精度等指标。1. 重复性:对同一样品进行重复测量,对所测数据进行比较。测试条件:样品为纯镍球,室温28℃,相对湿度小于60%,除湿机连续工作。重复性测量数据来源于井冈山大学JDAW2000D-VSM250。通过该样品5 次比饱和磁化强度的测量(第一次与第五次结果分别如图3、图4所示),总结比较结果可得出最大相对偏差约为万分之四,如表1 所示。http://ng1.17img.cn/bbsfiles/images/2016/08/201608241552_606487_1611921_3.png图3 第一次测量的磁化曲线http://ng1.17img.cn/bbsfiles/images/2016/08/201608241552_606488_1611921_3.png[align=ce







 我要推广仪器
我要推广仪器
 下载APP
下载APP