湖大王兆龙课题组:基于3D打印可降解水凝胶的快速可编辑人机界面
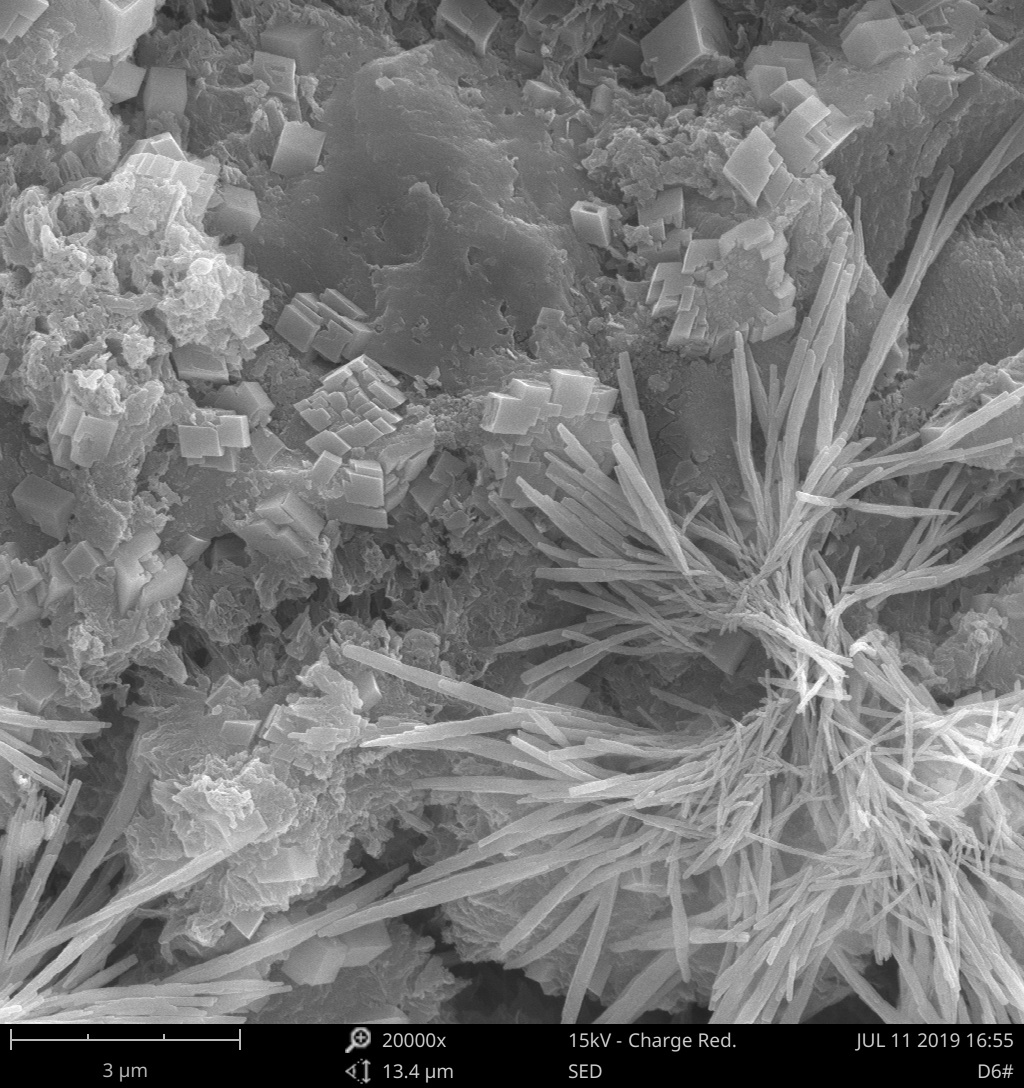
水凝胶凭借着可拉伸的三维高分子网络结构以及可供离子传输的水性环境在可穿戴器件、瞬态电子和人机交互等领域具有广泛的应用。然而,伴随着柔性电子领域的快速发展,如何解决大量的柔性电子产品废弃物成为了挑战之一。受此启发,湖南大学王兆龙副教授、段辉高教授与上海交通大学郑平院士、南方科技大学葛锜教授、航天五院杨东升研究员合作,在《Materials Today Physics》期刊上发表了题为“Ultra-fast programmable human-machine interface enabled by 3D printed degradable conductive hydrogel”的文章。该文章利用面投影光刻技术(nanoArch P140,摩方精密)制备了高精度高拉伸可导电水凝胶样品及可编辑线路。在特定环境下,体系能被完全降解,实现柔性电子的环保无残留。图1 基于面投影微立体光刻3D打印技术的水凝胶。(a)面投影光刻技术原理图。(b)水凝胶前体溶液组成。(c)前体溶液固化前后展示图。(d)H2O-H2O、H2O-PG、PG-PG 和 PAM-H2O-PG 的氢键相互作用的密度泛函理论分析(DFT)。(e)扫描电子显微镜(SEM)图像。(f)基于面投影光刻技术制备的高精度海星和雪花样品。具体的溶液制备和加工过程如图1a-b所示,先将光引发剂 (2, 4, 6-三甲基苯甲酰基)苯基次膦酸乙酯(TPO-L)分散在1,2-丙二醇中,得到溶液A。同时,将氯化钾(KCl)、丙烯酰胺(AAm)和聚(乙二醇)二甲基丙烯酸酯(PEGDMA)加入去离子(DI)水中混合均匀得到溶液B。将溶液A、B混合均匀,超声处理得到水凝胶前体溶液(图 1c),在405nm紫外光的照射下能被完全固化。三维多孔网络的微观结构保证了高拉伸性能,图2a-c展示了不同成分含量下样品的拉伸性。研究人员通过单轴拉伸测试探究了不同成分含量对拉伸性能的影响。此外,还探究了电导率的影响因素(图2d-h),证明了基于高拉伸导电水凝胶器件的低温工作性能。图2 力学与电学性能的探究。(a)拉伸测试。不同含量(b) 丙烯酰胺,(c) 1,2-丙二醇的水凝胶样品的应力-应变曲线。不同含量(d)氯化钾,(e)丙烯酰胺和(f)1,2-丙二醇的水凝胶样品的电导率测试。(g)丙烯酰胺和去离子水质量比为3的水凝胶样品的差示扫描量热(DSC)曲线。(h)不同温度下的电导率。(i) 拉伸与导电性能的综合展示。水凝胶的可降解的性能由酰胺基和交联剂的共同水解实现,图3b展示了六边形水凝胶样品的降解过程(pH=13)。通过改变样品的形状、厚度或表面积,能够对其降解速度进行调控。除了几何参数,水凝胶前体溶液的成分含量、环境的pH值和温度都会影响降解速率。(图3c-g) 图3 降解性能探究。(a)碱性环境中的降解原理图。(b)六边形水凝胶样品在pH值为13的碱性溶液中的降解过程。不同含量(c)丙烯酰胺,(d)PEGDMA和(e)1,2-丙二醇的水凝胶样品的降解时间测试。(f)不同pH值下的降解时间。(g)不同温度下的降解时间。基于高拉伸可降解导电水凝胶的柔性电子具有优异的工作性能,研究人员将其应用在柔性传感及人机交互等应用中。如图4a-b所示,基于水凝胶的柔性传感器对于重复的机械运动具有准确灵敏的监测能力,具有广泛的传感范围,从而达成稳定传感的目的。研究人员主要对手指弯曲、不同频率的重复运动、吞咽、发音等动作进行了监测。研究结果如图4c-i所示。除此之外,研究人员还利用水凝胶器件的可降解性能对瞬态电子及可编辑人机界面应用的可行性进行了探究。图5a展示了通过降解和修复能够实现串并联电路的快速转换。人机界面由基于水凝胶电路的肌电采集系统组成(图5b),可稳定获取五个手指的肌电信号,开发的 EMG 收集系统能够对复杂的手势进行编码,实现人手控制机械手进行动作,如图5c-g展示,证明了基于3D打印可降解导电水凝胶在快速可编辑人机界面应用的可行性。值得一提的是,基于水凝胶的体系能被完全降解,为可编程和环保可穿戴设备提供了新思路。图4 基于水凝胶的柔性传感器监测性能。(a)不同应变下水凝胶应变传感器相对电阻变化曲线。(b)不同拉伸率下的灵敏度。(c) 手指弯曲,(d)手指不同频率连续弯曲,(e)肘部连续弯曲,(f)行走期间膝盖弯曲,(g)吞咽,(h)发声和(i)恒定压力下的传感曲线。 图5 可编辑电路及人机界面应用。(a)基于水凝胶电路的降解和修复。(b)采集系统工作原理示意图。(c)所开发的 EMG 采集系统捕获得到的五个手指 EMG 信号。(d)暴露于碱下的EMG 采集系统捕获得到的EMG 信号。(e)基于可降解水凝胶的可编程人机界面示意图。(f)采集得到的不同手势的信号。(g)快速可编辑人机界面工作展示。该项研究成果获得了广东省重点领域研究发展计划,湖南省自然科学基金,民用航空航天技术研究项目和中国空间技术研究院空间探索计划和钱学森实验室等实验及研究项目支持。
























 我要推广仪器
我要推广仪器
 下载APP
下载APP