[size=14px][color=#cc0000]摘要:相对于手动针阀和比例阀,数控电动针阀具有数字控制、高灵敏度、快速响应和磁滞小等特点。本文介绍了对标国外产品开发的灵巧型数控电动针阀国产化替代产品,产品具有相同的技术指标性能,但性价比更高。与国内类似数控电动针阀相比,具有体积小巧的特点,更具有二次开发应用的灵活性。同时结合24位高精度控制器,可以充分发挥数控电动针阀的精细调节能力。[/color][/size][size=14px][color=#cc0000][/color][/size][align=center]~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~[/align][size=18px][color=#cc0000]1. 概述[/color][/size][size=14px] 针阀是一种微调阀,其阀塞为针形,主要用作调节气流量。针阀中的针型阀塞能使得阀口开启逐渐变大,从关闭到最大开启能连续细微地调节。针阀做为一种可以精确调节的阀门,用途较广,主要用于气体流量、真空度和压力的精细调节和控制。[/size][size=14px] 常用针阀的调节形式一般是手轮、手柄,但在实验室和工业自动化生产过程中往往需要可连接计算机和其他控制仪器的数字控制式针阀,针阀的开度可进行数字编程控制,如各种高精度分析仪器、半导体工艺设备、真空工艺设备和高精度流量控制等众多领域都会使用到数控电动针阀。[/size][size=14px] 另外,相对于比例阀,数控电动针阀具有灵敏度高和磁滞小的特点。因此针对数控电动针阀的市场需求,上海依阳实业有限公司开发了步进电机驱动的数控电动针阀系列产品,对标国外相应的数控电动针阀产品,具有相同的技术指标性能,但具有更高的性价比。与国内类似数控电动针阀相比,具有体积小巧的特点,更具有二次开发应用的灵活性。同时结合24位高精度控制器,可以充分发挥数控电动针阀的精细调节能力。[/size][color=#cc0000][size=18px]2. 国内外现有数控电动针阀[/size][size=16px]2.1. 国内产品[/size][/color][size=14px] 目前国产数控电动针阀普遍采用在标准针阀上增加常规电动执行器的结构形式,这种结构的典型产品如图2-1所示。采用电动执行器结构的数控电动针阀具有以下特点:[/size][size=14px](1) 电源电压普遍为交流220V(或直流24V),控制信号为直流0~10V(或4~20mA).[/size][size=14px](2) 普遍借鉴了用于球阀和蝶阀的电动执行器,造成体积庞大。[/size][size=14px](3) 固有可调比一般为50:1,调节和控制精度较差。[/size][size=14px](4) 调节响应时间较慢,存在严重的滞后现象,开关时间至少5秒以上。[/size][size=14px](5) 阀门口径普遍较大,最小也只能达到1/4”,比较适合较大流量的调节和控制。[/size][size=14px](6) 整体耐压较高,比较适合高压大流量的调节和控制。[/size][align=center][size=14px][img=,690,416]https://ng1.17img.cn/bbsfiles/images/2021/06/202106101115042592_8525_3384_3.png!w690x416.jpg[/img][/size][/align][color=#cc0000][/color][align=center][color=#cc0000]图2-1 典型国产电动执行器结构数控电动针阀[/color][/align][size=16px][color=#cc0000]2.2. 国外产品[/color][/size][size=14px] 国外典型的数控电动针阀是英福康公司和MKS公司产品,如图2-2所示,其中英福康公司产品的型号为VDE016,MKS公司产品是“上游流量控制阀”系列(包括148J、154B和248D)。[/size][align=center][color=#cc0000][size=14px][img=,690,223]https://ng1.17img.cn/bbsfiles/images/2021/06/202106101115181789_3450_3384_3.png!w690x223.jpg[/img][/size][/color][/align][color=#cc0000][/color][align=center][color=#cc0000]图2-2 典型国外电动针阀[/color][/align][size=14px] 国外电动针阀的显著特点是体积小,驱动控制采用独立的模块,这非常便于二次开发使用,图2-3是国外电动针阀的主要技术指标。[/size][align=center][size=14px][color=#cc0000][img=,690,390]https://ng1.17img.cn/bbsfiles/images/2021/06/202106101115283911_9315_3384_3.png!w690x390.jpg[/img][/color][/size][/align][size=14px][/size][align=center][color=#cc0000]图2-3 国外典型电动针阀技术指标[/color][/align][size=14px] 从上述技术指标可以看出,仅英福康电动针阀采用了步进电机控制方式,而MKS公司的产品基本都是典型的针型电磁阀,而电磁阀一般都具有较大的磁滞现象。[/size][size=14px] 以目前价格进行比较,英福康电动针阀自身已配备驱动电路模块,整体价格在2万人民币左右,而MKS公司目前主推的产品是248D,价格在8千人民币左右,还需配备驱动电路模块(约5千人民币左右),合计价格在1.3万人民币左右。[/size][size=18px][color=#cc0000]3. 上海依阳数控电动针阀[/color][/size][size=14px] 上海依阳实业有限公司开发的数控电动针阀是一种灵巧型的电子式双向计量针阀,更改了传统手动针阀的直通式结构,并采用了高精度直线步进电机驱动阀轴。数控电动针阀及其内部结构如图3-1所示。[/size][size=14px] 步进电机驱动针的分辨率为0.0127mm/步进和0.0254/步进两种标准。低压差阀门可以连续运行(100%占空比)。断电是针阀处于常闭位置。[/size][size=14px] 与电磁阀相比,步进电机驱动模式的最大优势是冷却操作,即没有因线圈加热而导致的控制操作问题、极高的分辨率、极低的压差和高操作压力。阀门可由直流12 VDC兼容逻辑电平和模拟0至2.5 VDC信号控制,也可采用RS485接口直接进行通讯控制。由此带来的好处是磁滞滞后小于2%,小于满量程的2.5%的出色线性度、2毫秒反应时间和数百万次的使用寿命。[/size][align=center][img=,690,409]https://ng1.17img.cn/bbsfiles/images/2021/06/202106101115396538_3429_3384_3.png!w690x409.jpg[/img][/align][size=14px][/size][align=center][color=#cc0000]图3-1 数控电动针阀内部结构示意图[/color][/align][size=14px] 上海依阳实业有限公司的NCNV系列数控电动针阀的技术指标如图3-2所示。[/size][align=center][color=#cc0000][size=14px][img=,690,411]https://ng1.17img.cn/bbsfiles/images/2021/06/202106101115509360_6271_3384_3.png!w690x411.jpg[/img][/size][/color][/align][color=#cc0000][/color][align=center][color=#cc0000]图3-2 数控电动针阀技术指标[/color][/align][size=14px] NCNV系列数控电动针阀配备了一个步进电机驱动电路模块,以提供了所需电源和控制信号,並以将直流信号转换为双极步进电机的步进控制,同时也可提供RS485串口通讯的直接控制。驱动电路模块、接线方式及其尺寸如图3-3所示。[/size][align=center][size=14px][color=#cc0000][img=,690,219]https://ng1.17img.cn/bbsfiles/images/2021/06/202106101116026977_6875_3384_3.png!w690x219.jpg[/img][/color][/size][/align][size=14px][/size][align=center][color=#cc0000]图3-3 数控电动针阀驱动电路模块[/color][/align][size=14px] NCNV系列中各个型号的尺寸如图3-4所示。[/size][align=center][size=14px][img=,690,422]https://ng1.17img.cn/bbsfiles/images/2021/06/202106101116117396_5838_3384_3.png!w690x422.jpg[/img][/size][/align][color=#cc0000][/color][align=center][color=#cc0000]图3-4 数控电动针阀系列尺寸图[/color][/align][size=18px][color=#cc0000]4. 总结[/color][/size][size=14px] 综上所述,上海依阳实业有限公司开发的数控电动针阀,采用了最先进的步进电机驱动技术,技术指标达到和超过国外产品,并具有较高的性价比。[/size][size=14px][/size][hr/][size=14px][/size]

经济在不断地发展,科技技术不断创新,各行各业都在随之升级转型,制造业也是一样。但大都认为在过去的几十年里中国制造业取得的重大成就是人们的手工劳作创造的,而在技术迅猛发展的今天,制造业的发展仅依靠劳作是不可行的,只有过硬的技术在未来的制造业中才能站稳脚步。 3D打印、机器换人、大数据制造,这些频繁出现的数据无一不在提醒我们,当下科技界三种飞速发展的技术——“人工智能、机器人和数字制造”,这些将重新构筑制造业的竞争格局,而如果将人工智能、机器人和数字制造技术综合集成应用于制造业,那将绝对是一场真正意义上的“制造业改革”。数控机床应为典范 提到数控机床,可能很多人都不是特别了解,可它却是众多工业生产行业的基础支柱。作为典型的机电一体化产品,数控机床可以解决复杂、精密、小批量、多品种的零件加工问题,是一种柔性的、高效能的自动化机床,代表了现代机床控制技术的发展方向。 中国目前一些行业的劳动力成本的不断上升,随之出现的“用工荒”为数控机床提供了又一具有潜力的应用领域——智能制造。中国企业越来越多地向智能制造转型以减轻人力短缺的影响,企业需要能够720小时连续不断高质量运转的机床设备,这就使得机床设备的可靠性变得尤其重要。 特别是近来,数控机床与工业机器人的配合使用更使得智能生产或者“无人化”工厂成为发展趋势。数控一代和智能一代是信息化和工业化深度融合的产物,可以看到机械产品的数控化和智能化创新具有鲜明的特征、本质的规律,可以普遍运用于各种机械产品创新,可以引起机械产品的升级换代,引起机械工业的深刻变革。这也是现在提出“数控一代”和“智能一代”概念的缘由和根据。http://ng1.17img.cn/bbsfiles/images/2016/12/201612231437_01_3169645_3.jpg二次开发是瓶颈 所谓智能制造就是数控机床产品除了完成直接加工任务之外,更应提升产品工艺适应性,能够适应不同行业、不同产品的加工特点,这是智能制造必不可少的,而要达到这些要求就需要机床设备拥有一个足够开放的数控系统平台,只有在一个开放性的系统上,用户才有机会把各种最新的创意和想法融到机床设计制造中。 然而目前的普遍情况是产品同质化泛滥,出现这一情况的原因在于,很多制造商在使用上过于追求简便、省事,采用一些进入中国市场较早的封闭性极强的数控系统,最终导致装备极为标准化,工艺适应性差,产品雷同,最终成为低端产能的推手。 “这就如同傻瓜相机和智能相机。”许政顺表示,“傻瓜式”的CNC产品,用户调整的内容很少,使用方便,但系统开放程度不足,许多核心和关键功能的使用受到限制,不利于进一步研发和扩大使用范围,最终也只能导致低产能的市场现象。 然而数控平台二次开发并非易事。据了解,数控系统硬件部分的核心是高效的运算平台和一组控制设备的接口,也就是说,数控硬件部分可以看做是一台工业计算机。从这方面来看,无论是工业控制电源、工业控制计算机主板、还是其他嵌入式设备,我国的产业化水平都很高。 而问题在于数控系统的另一组成部分——软件。数控系统技术方案中软件承载着数控系统的运动控制、逻辑控制和人机交互等主要功能。同时,在数控系统硬件趋同化的趋势下,软件正在成为系统中重要的价值构成部分。因此,软件产业化的问题已经成为数控系统产业化的关键。 由于我国数控产业技术开发源于某个技术关键点的突破,缺乏系统的需求分析,没有很好的进行抽象和概念、逻辑设计,造成的结果是很难从以往的产品中提取出一些有用的、共性的技术为后来的产品所使用。加之,国内很多公司的产品很少具有连续性,往往是新的一个产品完全重起炉灶,和老的产品没有半点关系,在这种开发模式下,软件功能完善程度,软件产品的可靠性,可持续发展能力都受到很大的局限。在整个产业发展过程中,低水平的重复研发的现象也较为普遍,使得技术积累缓慢。(来源:脉搏制造网)

对薄板进行折弯的数控折弯机模具包括支架、工作台和夹紧板,使用时由导线对线圈通电,通电后对压板产生引力,从而实现对压板和底座之间薄板的夹持。由于采用了电磁力夹持,使得压板可以做成多种工件要求,而且可对有侧壁的工件进行加工,操作上也十分简便。按普通的液压数控折弯机模具加工Q235板料来做简单介绍: 1.首先是接通电源,在控制面板上打开开关,再启动油泵,这样你就听到油泵的转动声音了。(此时机器不动作) 2.行程调节,使用必须要注意调节行程,在折弯前一定要测试。它的上模下行至最底部时必须保证有一个板厚的间隙。否则会对模具机器造成损坏。行程的调节也是有电动快速调整。 3.折弯槽口选择,一般要选择板厚的8倍宽度的槽口。如折弯4mm的板料,需选择32左右的槽口。 4.后挡料调整一般都有电动快速调整和手动微调,方法同剪板机。 5.踩下脚踏开关开始折弯,数控折弯机模具与剪板机不同,可以随时松开,松开脚便停下,在踩继续下行。塑料数控折弯机模具,塑料折边机,塑料板数控折弯机模具,塑料板材折弯塑料板材直接折弯,不需拼接,不需开槽,不需用焊条,它的折角外表美观不漏水,它将手工焊接转变成全自动的机器操作,提高了质量,提高了劳动效率,降低了劳动成本,大缩短了产品的生产周期。全自动塑料折角机属电气一体化全自动机械设备。根据塑料板加热变软熔化焊接的原理研制而成,它适合所有热塑性材料的折角。速度快,折角处理表面美观,强度高。 还有一种是H型数控折弯机模具,其结构较之前两种有很大不同,其为杠杆式结构,一般用于大吨位数控折弯机模具,通过杠杆放大原理,把力放大.同时其采用电\液\数结合的位置控制,使其在同吨位的数控折弯机模具上性价比尤高。但是国内能够生产此种机型的厂家并不多,数控液压板料数控折弯机模具床的主要特点: WC67K型数控折弯机模具,采用钢板焊接结构,振动时效消除应力,机床具有很好的刚性和稳定性,整个机架刚性好,工作平稳、安全可靠、操作方便,通过数控折弯机模具数控系统和液压系统的协调控制,达到理想的折弯效果。http://ng1.17img.cn/bbsfiles/images/2016/12/201612281316_01_3169645_3.jpg机床的主成部分及结构说明: 1.滑块部分:采用液压传动,滑块部分由滑块、油缸及机械挡块微调结构组成。左右油缸固定在机架上,通过液压使活塞(杆)带动滑块上下运动,机械挡块由数控系统控制调节数值。 2.工作台部分:由按钮盒操纵,使电动机带动挡料架前后移动,并由数控系统控制移动的距离,其最小读数为0.01毫米(前后位置均有行程开关限位) 3.同步系统:该机由扭轴、摆臂、关节轴承等组成的机械同步机构,结构简单,性能稳定可靠,同步精度高。机械挡块由电机调节,数控系统控制数值。 4、挡料机构:挡料采用电机传动,通过链操带动两丝杆同步移动,数控系统控制挡料尺寸。激光加工系统与计算机数控技术相结合可构成高效自动化加工设备,为优质、高效和低成本的加工生产开辟了广阔的前景。而激光内雕机正是将激光技术和计算机技术结合起来的高新一体化新型激光外设加工设备。激光雕刻机采用高性能的激光和数控技术,通过自主研制的光学系统、控制系统和计算机软件,在水晶、玻璃内实现三维动态精密激光雕刻,解决了雕刻速度慢、系统工作不稳定、丢激光点,对图像和文字处理软件功能不全、使用计算机接口控制卡、激光爆炸点不均匀、自动控制装置不尽完善、设备性价比低等问题。全面提高了系统的效率、精度、可维护性、通用性和安全性。水晶玻璃内雕作品在色彩上变得更为丰富是必然的。利用水晶玻璃工艺品的内雕部分对光线具有较强的反射、折射作用,而空白部分对光线具有较好的通透性能的光学原理,由微控制电路按照三基色调色板原理,分别控制几种色彩的灯,在内雕图像上混色,变化出多种绚丽的色彩,从而使原本白色的内雕图像呈现出五彩缤纷、光彩夺目的效果。三点式数控折弯机模具工作原理 凹模入口处园角与模芯表面组成 A 、 B 、 C 三点,由这三点确定工件折弯角度,其中 C 点受力最大,它与材料回弹量角正确与否有直接关系,只要改变模芯距离的大小,可获得不同的折弯角度,角度控制是在支座上装一表盘,再在模芯上装上拐臂带动指针在表盘上显示出来,其特点是角度控制操作简单直观,无需专用模具便可折弯不同角度的母线,其折弯属强制性折弯,并能提高折弯精度。 一种装置活动刀模夹的折弯剪板机、数控折弯机模具与传统数控折弯机模具的区别是在滑动上梁装置了一个活动刀模夹,在活动刀模夹上同时装有折弯模和剪板刀或者同时装有两种折弯模,在活动刀模夹上装折弯模和剪板刀的称折弯剪板机;在活动刀模夹上装两种都是折弯模的称数控折弯机模具。折弯剪板机使用时控制推动活动刀模夹转动到相应的位置就可变换成折弯功能或剪板功能;数控折弯机模具使用时推动活动刀模夹转动到相应的位置就可变换成薄板折弯模折弯功能或厚板折弯模折弯功能。折弯剪板机的操作使用与单一的数控折弯机模具或单一的剪板机一样方便,制造材料却大幅减少;数控折弯机模具换模快,使用非常方便。
数控系统是数控机床的控制核心,现代的数控系统都是采用专用的计算机控制系统,由硬件和软件两大有些组成。 数控系统的硬件出现疑问直接影响数控机床的运行,一旦出现硬件故障,有必要将损坏的硬件修复或许更换备件,机床才干恢复正常作业。数控系统的硬件包括CPU模块、存储器模块、显现模块、伺服轴控制模块、PLC接口模块、电源模块、显现器等。数控系统硬件出现故障时,只需在找到有疑问的模块后,对其进行修复或许更换备件,才干排除故障。 下面介绍一些数控系统硬件故障的维修实例。 例3-15一台数控车床开机后系统死机 口数控系统:FANUC OTC系统。 口故障景象:这台机床通电开机后,系统死机,不能进行任何操作。 口故障分析与检查:对FANUC OTC系统数控装置进行检查,发现CPU底板L4报警灯亮,伺服控制模块的WDA灯亮,如图3-36所示。CPU底板L4报警灯亮指示伺服控制模块(轴卡)故障(接触不良、脱落或软件版本不符)或许主CPU底板故障。由于伺服控制模块的报警灯也亮,所以首要与别的机床互换伺服控制模块,但这台机床故障依旧。与别的机床更换系统CPU底板C A20B-2000-0175/08B,故障转移到别的机床,阐明系统CPU底板损坏。http://img.mp.itc.cn/upload/20161222/3d776078b76044208ba852bac0fb65ab_th.jpg 口故障处理:更换系统CPU底板后,机床恢复正常运行。 例3-16一台数控车床作业时出现报警"930 CPU INTERRUPT" (CPU中断) 口数控系统:FANUC OTC系统。 口故障景象:这台机床作业2-3小时后,出现930号报警,关机一会儿再开还能够作业。 口故障分析与检查:调查故障景象,系统除了出现930号报警外,有时还出现报警"920WATCH DOG TIMER"(看门狗超时),检查系统发现CPU主板上L2和L4报警灯亮(参考图3-36 ) L2报警灯亮指示NC有故障,L4灯亮指示轴控制模块故障(接触不良、脱落、软件版本不符)、主电路板故障等。由所以作业一段时问后才出现报警,首要与别的机床互换电源模块,这台机床故障依旧。与别的机床互换CPU主板,仍是原来的机床报警。与另一台机床互换伺服轴控制模块A 16B-2200-039后,故障报警转移到另一台机床上,阐明是系统伺服车由控制模块出现疑问。 口故障处理:更换数控系统伺服轴控制模块后,机床恢复安稳运行。 例3-17一台数控车床开机出现报警"408 SERVO ALARM: (SERIAL NOT RDY )"(伺服报警:串行主轴没有预备好)"409 SERVO ALARM: ( SERIAL ERR )"(伺服报警:串行主轴错误) 口数控系统:FANUC OTC系统。 口故障景象:这台机床开机就出现408号和409号报警,指示串行主轴故障。 口故障分析与检查:这台机床采用FANUC a系列数字伺服系统,检查伺服系统,发现主轴伺服模块显现器上有“24"号报警代码显现,如图3-37所示。依据主轴伺服系统报警手册,"24”号报警代码指示串行口数据传输出错,也许的故障原因如下: 1)主轴驱动模块与NC数据传输不正常。 2 ) NC没有接通。 3)串行总线电缆连接有疑问。 4)串行总线接口电路有疑问。 5 ) I/O总线适配器有疑问。http://img.mp.itc.cn/upload/20161222/a5e9bad3fe9241b38d4ec3f1789d164e.jpg 检查串行总线连接,没有发现疑问;与别的机床互换主轴驱动模块,故障没有转移;串行主轴的信号是从系统的存储器模块输出的,互换系统存储器模块,故障依旧;当把另一台机床的系统CPU底板(A206-2002-065更换上后,系统不再产生报警,阐明系统CPU底板出现了疑问。 口故障处理:更换系统CPU底板后,机床恢复正常运行。 例3-18一台数控车床开机出现报警"420 SERVO ALARM: Z AXIS EXCESSERROR"(伺服报警:Z轴超偏差错误) 口数控系统:FANUC OTC系统。 口故障景象:这台机床开机就出现图3-38所示的420号报警,指示Z轴超差。 口故障分析与检查:依据故障景象和报警信息分析,Z轴开机就出现超差报警,这时还没有让Z轴运动,因此故障原因也许是机床数据疑问、编码器疑问、伺服电动机疑问、系统伺服轴控制模块疑问或伺服驱动模块疑问等。http://img.mp.itc.cn/upload/20161222/feed5e8fe4c646a699ec0eb044562f95_th.jpg 首要检查有关的机床数据没有发现异常。为了进一步确认故障,在系统伺服轴控制模块(轴卡)上将X轴指令电缆和反馈电缆插头与Z轴的互换,即指令输出插头M 184与M187互换插接,编码器反馈插头M185与M188互换插接。这时开机,系统仍然出现420号报警,指示的仍是Z轴故障,阐明故障与编码器、伺服驱动模块和伺服电动机都没有联系。所以故障原因应该定位在系统的伺服轴控制模块(轴卡)上。 口故障处理:更换系统的伺服轴控制模块A 16B-2200-039后,通电开机,机床恢复正常运行。 例3-19一台数控车床出现报警"424 SERVO ALARM: Z AXIS DETECT ERROR"(伺服报警:Z轴检测错误) 口数控系统:FANUC OTC系统。 口故障景象:这台机床开机就出现如图3-39所示的424号报警,指示Z轴有疑问。 口故障分析与检查:依据FANUC OTC系统的作业原理,该系统具有共同的诊断数据,通过系统“DGNOS”功用能够调用这些数据。当机床出现故障时,检查这些数据,能够了解机床的一些运行情况,为确诊机床故障供给依据。http://img.mp.itc.cn/upload/20161222/fb9bffd004954d8888e2ab89704324f4_th.jpg 放电单元故障。这台机床的伺服系统采用FANUC的a系列数字伺服驱动装置,更换伺服驱动模块和电源模块都没有处理疑问,并且调查伺服装置一切数码管均显现“一”,如图3-40所示,指示伺服系统没有预备好。因此,怀疑系统伺服轴控制模块(轴卡)有疑问。 口故障处理:更换系统伺服轴控制模块后,系统报警消除,机床恢复正常作业。 例3-20一台数控车床通电开机后,屏幕没有显现 口数控系统:FANUC OTC系统。 口故障景象:这台机床通电发动系统后,系统发动不了。 口故障分析与检查:出现故障后,首要对系统进行检查,按下系统发动按键后,系统电源模块上的指示灯一个也不亮,如图3-41所示。FANUC电源模块上有两个指示灯,一个绿色PIL指示灯,指示电源模块作业正常;另一个赤色指示灯指示电源系统有故障。 检查系统发动线路和电源模块输入电压都正常没有发现疑问。那么必定是如图3-42所示的系统电源模块A16B-1212-0100-01损坏。http://img.mp.itc.cn/upload/20161222/ac6bd52926ce4c8ba95db64752353351_th.jpg 口故障处理:维修电源模块后,系统恢复正常作业。 例3-21一台数控球道磨床出现报警"104 Control loop hardware"(控制环硬件) 口数控系统:西门子3M系统。 口故障景象:这台磨床常常出现图3-43所示的104号报警,指示X轴伺服控制环有疑问。http://img.mp.itc.cn/upload/20161222/5edb1c6793e2470eb493153ea27e9bda_th.jpg 口故障分析与检查:依据机床的作业原理,为确保机床的精度,该机床采用光栅尺作为位置反馈元件,为此在系统测量模块上加装EXE信号处理板C 260 619 015 918 976,用以对光栅尺反馈信号进行处理。对故障景象进行调查,不管X轴是不是运动,都出现报警,有时开机就出现报警。因此怀疑光栅尺或许系统的测量模块有疑问。 本着先易后难的原则,首要检查系统测量模块(6FX1125-1AA01),由于X轴和Y轴各采用一块EXE信号处理板,如图3-44所示,所以采用互换法将X轴的EXE信号处理板与Y轴的EXE信号处理板对换,这时机床再出现故障时,显现114号报警,指示的是Y轴伺服环有疑问,即故障转移到Y轴上,阐明是原X轴的EXE信号处理板有疑问。http://img.mp.itc.cn/upload/20161222/f738f9942bee4d7380f6751960fc1d9e_th.jpg 口故障处
当今的中国工业发展中,对于各种各样的金属材料使用越来越需求广泛,对于切割质量,切割的精度都有很高的要求。今天我们就为大家讲讲数控切割机当今的发展现状。 1、数控切割机的发展。从几种通用数控切割机应用情况来看,数控火焰切割机功能及性能已比较完善,其材料切割的局限性(只能切割碳钢板),切割速度慢,生产效率低,其适用范围逐渐在缩小,市场不可能有大的增加。 等离子切割机具有切割范围广(可切割所有金属材料),切割速度快,工作效率高等特点,未来的发展方向在于等离子电源技术的提高、数控系统与等离子切割配合问题,如电源功率的提升可切割更厚的板材;精细等离子技术的完善和提高可提高切割的速度、切面质量和切割精度;数控系统的完善和提高以适应等离子切割,可有效提高工作效率和切割质量。 激光切割机具有切割速度快,精度和切割质量好等特点。激光切割技术一直是国家重点支持和推动应用的一项高新技术,特别是政府强调要振兴制造业,这就给激光切割技术应用带来发展机遇。在国家制定中长远期发展规划时,又将激光切割列为关键支撑技术,因为它涉及国家安全、国防建设、高新技术的产业化和科技前沿的发展,这就把激光切割提升到很高的重视程度,也必将给激光切割机的制造和升级带来很大的商机。 前几年,国内在销的激光切割机大部分为国外进口产品,国内产品所占份额甚小。随着用户对激光切割技术特点的逐步深入了解和示范性采用,带动了国内企业开发、生产激光切割机。 2、专用数控切割机的发展。数控管材切割机适用于各种管材上切割圆柱正交、斜交、偏心交等相惯线孔、方孔、椭圆孔,并能在管子端部切割与之相交的相惯线。这种类型的设备广泛应用于金属结构件生产,电力设备、锅炉业、石油、化工等工业部门。数控坡口切割机是行内比较高端的产品之一,此类型设备的回转坡口切割功能可以满足焊接工艺中不同板材开不同角度坡口的要求。随着我国造船业的发展,船厂在国内率先引进和使用了数控等离子切割机。随着技术的发展,国内外船厂纷纷配备具有回转坡口切割功能的数控等离子切割机,以满足高技术、高附加值船的建造要求。 随着工业的切割生产需求,切割相关的一切都要求越来越高,只有能迎合我们的市场生存的切割设备才能长久的生存。
一方面,机械部件的异常舫损和管道的阻塞等常见的故障形式都会造成相应部位的温度升高。因此,溢度是表征机械故障的一个特征参量;另一方面,机械零件的性能又与温度有密切的关系,温度过高,会使零件的性能降低,甚至还会造成零件的烧损,因此,温度也是引发立式数控车床机械设备故障的一个重要因素。 所以,温度监测在机械设备故障诊断中占有重要地位。所谓温度监测是指利用各种测温仪器,测量机械装置的温升情况,并与机械装置正常运行时的温度进行比较,从而诊断出发生故障的零件和故障程度。在立式数控车床机械设备的故障诊断与监测中,测温方式可分为接触式测温和非接触式测温两大类。接触式测温具有快速、正确、方便的特点,因而在各工业领域得到广泛应用。 但不能满足某些特殊场合的测温要求,如高压输电线接点处的温度监测、炼钢高炉的温度监测等。而对于这些场合,必须采用非接触式测温的方式。非接触式测温的方式具有不破坏被测对象的温度场,可测量运动部件温度的优点,但其只能测量系统的表面温度,而不能测量内部温度。本文出自:脉搏制造网

[b]小型数控机床欣赏[/b][img=小型数控机床,690,460]http://ng1.17img.cn/bbsfiles/images/2017/08/201708312019_01_1790226_3.jpg[/img]小型数控铣床[img=小型数控机床,690,460]http://ng1.17img.cn/bbsfiles/images/2017/08/201708312019_02_1790226_3.jpg[/img]小型数控车床[img=小型数控机床,690,460]http://ng1.17img.cn/bbsfiles/images/2017/08/201708312019_03_1790226_3.jpg[/img]小型数控车床[img=,690,460]http://ng1.17img.cn/bbsfiles/images/2017/08/201708312019_04_1790226_3.jpg[/img]小型数控铣床
摘 要:介绍一款经济型智能电动机保护器-ARD2型的设计与应用,该保护器将众多保护功能集于一体,针对电动机在实际使用中会遇到的多种故障进行保护,使电机在各种故障条件下不会产生损坏,提高电动机运行的可靠性,减少由于电动机的故障问题带来的生产损失。关键字:电动机保护器,ARD2型,保护功能,经济型0 引言 由于生产自动化及各种自动控制、顺序控制设备的出现,要求电机经常运行在频繁的起动、制动、正反转、间歇以及变负荷等方式,电机的运行要求越来越高,运行环境也越来越苛刻,同时,由于电机与配套机械连在一起,当电机发生故障时,经常波及生产系统。因此,对电机实行有效的保护是保证生产系统正常工作的一项重要任务。 本文将要介绍的是ARD2型电动机保护器的经济、简洁的设计方法和应用。该型保护器主要用于对电动机运行状态的监测,并针对电动机在生产运行过程中出现的启动超时、欠压、过压、欠载、过载、短路、堵转/阻塞、断相、不平衡、剩余电流(接地/漏电)等故障进行保护,使电动机不至于因为以上原因而导致损坏,从而使生产遭受损失,采用ARD2电动机保护器能有效提高电动机运行的安全性,降低生产损失,是传统热继电器的理想替代品。1 技术指标 ARD2型智能电动机保护器的技术指标见表1。2 设计方法 目前市场上综合型的智能电动机保护器的设计主要采用交流采样方式+高性能单片机的方案,采用该设计方法的电动机保护器测量参数多、测量精度高、能够提供更完善的保护功能,但是采用此设计方法的成本较高,销售价格也高,在只需要对电动机提供过载、断相等基本常见故障保护的场合没有性价比可言。因此采用一种设计简单、功能能够满足基本保护要求、主要用于替代热继电器的智能电动机保护器将会有很大的市场。ARD2型保护器就是一款设计简洁,保护功能较多,能够满足大多数电动机保护要求的经济型的智能电动机保护器。 ARD2型智能电动机保护器采用低成本的设计方案,整体系统由信号处理单元、中央处理单元、电源模块、人机交互单元、人机界面、控制模块、通讯接口模块等构成,装置硬件结构如图1所示。 信号处理单元采用整流放大滤波电路,见图2,该电路能将采样得到的交流信号整流成直流信号,由CPU片内AD进行转换计算。 图中IC1为运算放大器LM324,采用双电源供电,这样可以保证LM324输出电压达到5V充分利用A/D转换提高显示精度。IC1将采样得到的信号进行两级放大处理,提高了信号的采样精度,保证了信号的线性度。2.2 中央处理单元 中央处理单元选用MOTOROLA公司的第一款基于高度节能型S08核的器件MC9S08AW32高性能单片机,该单片机片上资源丰富,抗干扰能力突出。内含32K字节用户程序空间,片上集成2K的RAM,支持BDM片上调试功能,片内集成看门狗电路,片上集成8通道10位AD。外部扩展了铁电存储器,用于存储一些重要的参数,即使以后升级程序也不会丢失先前的重要数据。 CPU对采样信号进行处理计算,根据测量得到的电流、电压值与预先设定的各种保护数值进行对比,由此来判断电动机的运行状态是否正常,是否需要进行保护。中央处理单元电路见图3。 采用AC380V电源模块。该电源模块输入电压为AC220V~450V,输入频率45Hz~60Hz,输出电压稳定、故障率小,输出纹波 1%,转换效率≥75%。具有过压、过流保护。该模块经实际现场使用,具有很高的稳定性、可靠性和抗干扰能力。2.4 人机交互单元 人机交互单元采用LED显示和按键输入,系统采用单排四位LED数码管显示各种信息。用户可根据实际需要进行设置。在编程状态下显示菜单及参数。数码管显示采用动态扫描方式,其驱动电路使用一片74HC595加三极管构成。2.5 控制模块 控制模块主要由开关量输入、输出组成,见图4。开关量输入用于监测外部开关状态,也可根据客户要求用于电动机的起动、停止控制;开关量输出主要用于输出报警信号、脱扣信号和远程起动信号。2.6 通讯接口模块 通讯接口模块采用通用的RS-485、Modbus RTU通讯规约,能实现遥测、遥控、遥信等功能,见图5。2.7 整体设计 保护器采用主体模块和电流互感器模块分离的结构如图6。该结构非常适合安装于抽屉式开关柜。安装时将带显示的保护主体部分嵌入式的安装在开关抽屉的活动面板内,这样既简化了柜内接线、又方便了系统随时调整、设定参数和显示、监控,同时数字化的显示面板也增添了柜面的统一性和美观性,使得配电室内的设备运行情况及故障状态一目了然,极大的方便了系统巡视和检修维护。互感器部分采用DIN35导轨式安装方式,方能够按照用户的测量需求,更换不同量程的电流互感器。2.8 软件设计 本产品的主软件流程图如图7所示,主程序包括A/D子程序、保护子程序、计算显示子程序、按键处理子程序、通讯子程序等子程序,由于程序内容较多,现只给出主程序流程和保护子程序流程图,见图8。3 功能简介 ARD2智能电动机保护器按额定工作电压可分为AC380V、AC220V;按工作电流范围来分可分为6.3A(1.6A~6.3A)、25A(25A~100A)、100A(25A~100A)、250A(63A~250A)、800A(250A~800A)五个测量档位。实现对电动机运行中出现的启动超时、欠压、过压、欠载、过载、短路、堵转/阻塞、断相、不平衡、剩余电流(接地/漏电)等故障进行保护。并能在此基础上增加各种附加功能,主要有: 1)远程起动功能:由上位机通过通讯控制保护器的起动继电器,来实现远程起动电动机。 2)报警功能:当电动机运行状态出现故障时,在还未达到预先设定的脱扣时间前进行报警提示。 3)通讯功能:RS-485通讯功能,能够通过通讯接口将保护器检测得到的电动机运行的各种参数实时传送给后台主控设备,方便工作人员及时了解电动机的工作状态。 4)漏电保护:开放漏电保护监测功能,当电动机的运行环境出现漏电情况时,及时切断电动机的供电电源。 5)开关量输入:用于监测外部开关的分合状态,也可按客户要求进行起、停控制。 6)事件记录:记录保护器的最近8次脱扣动作产生的时间和原因,方便维护人员查看和检修。 7)4~20mA模拟量输出:提供直流4~20mA电流信号。4 典型应用 图9为采用直接启动接线方式的ARD2智能电动机保护器典型应用图。用户可通过按动外部启动按钮SB2或通过上位机远程控制保护器的启动继电器来启动电机。其控制方式为:当启动按钮SB2按下或远程启动继电器7、8闭合,则接触器KM的吸引线圈处于通电状态,使接触器KM的主触头和自锁触头KM闭合,启动电动机。此时,松开SB2或启动继电器7、8断开后接触器KM的吸引线圈还是处于通电状态,主触头和自锁触头KM仍旧处于闭合状态,电动机处于通电状态。一旦电动机正常启动后,保护器就对电动机的运行状态进行监测,当电动机出现故障状态后,ARD2保护器的脱扣继电器动作,常闭触点95、96断开,使接触器KM的吸引线圈断电,使接触器KM的主触头和自锁触头的状态由合变为分,切断电动机的供电,使电动机停车。 图10为电动机采用Y—∆转换启动接线方式的ARD2智能电动机保护器典型应用图。在图5中,时间继电器KT的触头状态为吸引线圈失电时的状态,即“常态”。当启动按钮SB2或远程启动继电器7、8闭合,则接触器KM1线圈通电,使KM1的主触头和自锁触头KM1闭合,同时,时间继电器KT吸引线圈通电,由于延时作用,它的触头不立即动作,于是接触器KM3线圈通电,接于主回路中的KM3的主触头闭合,电动机进行星型连接降压启动状态,同时KM3的互锁触头断开,使接触器KM2的吸引线圈不能通电,电动机运行于Y型供电方式。当时间继电器KT的延时时间到,时间继电器KT的延时断开常闭触头断开,使接触器KM3吸引线圈断电,主触头KM3断开,同时时间继电器KT的延时闭合常开触头闭合,接触器KM2的吸引线圈通电,主触头KM2闭合,电动机供电方式改为∆型连接,进入正常运行状态。与此同时,KM2的互锁触头断开,使接触器KM3吸引线圈不会通电。一旦电动机正常启动后,保护器就对电动机的运行状态进行监测,当电动机出现故障状态后,ARD2保护器的脱扣继电器动作,常闭触点95、96断开,使接触器KM的吸引线圈断电,使接触器KM的主触头和自锁触头的状态由合变为分,切断电动机的供电,使电动机停车。 在实际使用过程中,应注意严格按照电动机的额定电流来选择保护器,防止人为放大和缩小保护范围;避免由于量程太大或太小而造成的测量误差,从而使保护器无法正常对电动机进行保护。 由于ARD2保护器采用主体模块和电流互感器模块分离的结构,所以在现场使用时应注意按出厂编号将保护器主体与互感器配对使用。但考虑到会有维修更换保护器或互感器的情况发生,因此只要保护器主体和互感器的产品型号一样,可以任意配和使用,不会对测量保护产生影响。 保护器的设计定位为替代热继电器,故保护器本身不提供对电动机的起动、停止控制及各种起动控制方式。对电动机各种起动控制方式的实现需要外部电路的支持。6 结语 ARD2智能电动机保护器的功能较多,能够对电动机运行中遇到的各种类型的故障进行准确的报警显示和脱扣动作,能有效的防止电机意外烧毁的发生,能为用户节约大量的资金,是热继电器的理想替代产品。因此,广泛采用
为了加强机床行业和军工行业、能源装备领域合作,扩大国产数控机床创新成果应用,进一步深化长效合作机制,推进国防科技工业装备和国家能源装备数控化、自主化,促进共同协调发展,国家发展改革委、工业和信息化部、国家能源局、国家国防科技工业局于2011年4月12日,即中国国际机床展览会(CIMT2011)开幕的第二天,在北京联合召开了“2011年军工行业与能源装备领域国产数控机床应用座谈会”。会议由中国机床工具工业协会、中国和平利用军工技术协会共同承办。国家发展改革委副主任、国家能源局局长刘铁男,工信部副部长苏波,国防科工局副局长王毅韧到会并做了重要讲话。四部委局机关主管司局领导、行业协会、咨询公司,以及来自机床行业和军工行业、能源装备领域的企业代表共计约200人出席了会议。 会议由国家发改委经济动员办主任周建平、国防科工局发展计划司副司长曲克波分别主持。国家发改委吴一亮处长宣讲了《国产数控机床应用长效合作机制工作指南》。工信部王建宇处长介绍了高档数控机床与基础制造装备重大专项进展及有关情况。机床协会吴柏林常务副理事长通报了近年来机床工具行业发展动态与供需合作最新进展,发布了2011年版《国产数控机床推荐产品汇编》。军工协会赵俐代理秘书长介绍了重点建设项目国产数控机床采购情况,发布了第6批《高档数控机床需求指南》。济南二机床、沈阳机床、东方汽轮机厂等12家供需双方企业交流了高档数控机床开发和应用体会。会议对37家企业获得的20项国产数控机床优秀合作项目进行了表彰,并颁发了奖牌。会议组织与会代表参观了第十二届中国国际机床展览会,考察了国内外机床最新发展,增强了参会企业对我国数控珩磨机企业实力和水平的感性认识。 国家发展改革委副主任、国家能源局局长刘铁男、工信部副部长苏波、国防科工局副局长王毅韧在讲话中对四部委、两协会举办的座谈会的形式和效果给予充分肯定,认为政府主导、行业协会搭桥、市场运作、企业供需对接的长效合作机制,对贯彻落实国家“十二五”规划纲要,发展战略性新兴产业,推进军民融合式发展,增强我国经济实力和国防实力等都具有重要意义,表示下一步要继续支持行业间的合作与创新,在重大专项、依托示范工程、规划、管理方式等方面加以引导和鼓励,把机床供需间的长效合作机制建设成“品牌”机制。国家发改委经济动员办主任周建平做了会议总结,要求与会代表深入领会四部委领导讲话精神,进一步总结、巩固和推广行业间建立长效合作机制的经验和做法,结合企业发展实际,采取贯彻落实措施,要加强自主创新能力建设,一些重大项目和工程要精心组织,建成精品和名牌。 2011年是“十二五”计划启动实施之年,机床行业是国家重点重视的行业之一,国产数控机床的发展与军工行业、能源装备领域的进步是相辅相成的,四部委局联合召开国产数控机床应用座谈会,就是加快振兴我国装备制造业发展,促进国产数控机床应用的具体行动。会议指出,数控机床供需双方企业应该一起共同商讨如何贯彻国家有关政策和实施意见,进一步推动数控设备国产化;要站在国家的战略高度,谋划长远发展,不同领域的企业要真诚合作、相互支持,实现共赢;做好政府导向、协会促进、企业实施的各项具体工作。(重庆在职研究生/www.cqsfdx.com)
ARD2智能电动机保护器蔡昀羲 ( 上海安科瑞电气有限公司 上海嘉定 201801) 摘 要:介绍一款经济型智能电动机保护器-ARD2型的设计与应用,该保护器将众多保护功能集于一体,针对电动机在实际使用中会遇到的多种故障进行保护,使电机在各种故障条件下不会产生损坏,提高电动机运行的可靠性,减少由于电动机的故障问题带来的生产损失。关键字:电动机保护器,ARD2型,保护功能,经济型0 引言 由于生产自动化及各种自动控制、顺序控制设备的出现,要求电机经常运行在频繁的起动、制动、正反转、间歇以及变负荷等方式,电机的运行要求越来越高,运行环境也越来越苛刻,同时,由于电机与配套机械连在一起,当电机发生故障时,经常波及生产系统。因此,对电机实行有效的保护是保证生产系统正常工作的一项重要任务。 本文将要介绍的是ARD2型电动机保护器的经济、简洁的设计方法和应用。该型保护器主要用于对电动机运行状态的监测,并针对电动机在生产运行过程中出现的启动超时、欠压、过压、欠载、过载、短路、堵转/阻塞、断相、不平衡、剩余电流(接地/漏电)等故障进行保护,使电动机不至于因为以上原因而导致损坏,从而使生产遭受损失,采用ARD2电动机保护器能有效提高电动机运行的安全性,降低生产损失,是传统热继电器的理想替代品。1 技术指标 ARD2型智能电动机保护器的技术指标见表1。 表 1http://www.acrel.cn/cn/download/common/upload/2011/02/21/105532g5.jpg2 设计方法 目前市场上综合型的智能电动机保护器的设计主要采用交流采样方式+高性能单片机的方案,采用该设计方法的电动机保护器测量参数多、测量精度高、能够提供更完善的保护功能,但是采用此设计方法的成本较高,销售价格也高,在只需要对电动机提供过载、断相等基本常见故障保护的场合没有性价比可言。因此采用一种设计简单、功能能够满足基本保护要求、主要用于替代热继电器的智能电动机保护器将会有很大的市场。ARD2型保护器就是一款设计简洁,保护功能较多,能够满足大多数电动机保护要求的经济型的智能电动机保护器。 ARD2型智能电动机保护器采用低成本的设计方案,整体系统由信号处理单元、中央处理单元、电源模块、人机交互单元、人机界面、控制模块、通讯接口模块等构成,装置硬件结构如图1所示。http://www.acrel.cn/cn/download/common/upload/2011/02/21/11137kf.jpg图 12.1 信号处理单元 信号处理单元采用整流放大滤波电路,见图2,该电路能将采样得到的交流信号整流成直流信号,由CPU片内AD进行转换计算。http://www.acrel.cn/cn/download/common/upload/2011/02/25/175202r.jpg 图 2 图中IC1为运算放大器LM324,采用双电源供电,这样可以保证LM324输出电压达到5V充分利用A/D转换提高显示精度。IC1将采样得到的信号进行两级放大处理,提高了信号的采样精度,保证了信号的线性度。2.2 中央处理单元 中央处理单元选用MOTOROLA公司的第一款基于高度节能型S08核的器件MC9S08AW32高性能单片机,该单片机片上资源丰富,抗干扰能力突出。内含32K字节用户程序空间,片上集成2K的RAM,支持BDM片上调试功能,片内集成看门狗电路,片上集成8通道10位AD。外部扩展了铁电存储器,用于存储一些重要的参数,即使以后升级程序也不会丢失先前的重要数据。 CPU对采样信号进行处理计算,根据测量得到的电流、电压值与预先设定的各种保护数值进行对比,由此来判断电动机的运行状态是否正常,是否需要进行保护。中央处理单元电路见图3。http://www.acrel.cn/cn/download/common/upload/2011/02/25/175442k.jpg图 32.3 电源模块 采用AC380V电源模块。该电源模块输入电压为AC220V~450V,输入频率45Hz~60Hz,输出电压稳定、故障率小,输出纹波 1%,转换效率≥75%。具有过压、过流保护。该模块经实际现场使用,具有很高的稳定性、可靠性和抗干扰能力。2.4 人机交互单元 人机交互单元采用LED显示和按键输入,系统采用单排四位LED数码管显示各种信息。用户可根据实际需要进行设置。在编程状态下显示菜单及参数。数码管显示采用动态扫描方式,其驱动电路使用一片74HC595加三极管构成。2.5 控制模块 控制模块主要由开关量输入、输出组成,见图4。开关量输入用于监测外部开关状态,也可根据客户要求用于电动机的起动、停止控制;开关量输出主要用于输出报警信号、脱扣信号和远程起动信号。http://www.acrel.cn/cn/download/common/upload/2011/02/25/17610tx.jpg图 42.6 通讯接口模块 通讯接口模块采用通用的RS-485、Modbus RTU通讯规约,能实现遥测、遥控、遥信等功能,见图5。http://www.acrel.cn/cn/download/common/upload/2011/02/25/17631hz.jpg 图 52.7 整体设计 保护器采用主体模块和电流互感器模块分离的结构如图6。该结构非常适合安装于抽屉式开关柜。安装时将带显示的保护主体部分嵌入式的安装在开关抽屉的活动面板内,这样既简化了柜内接线、又方便了系统随时调整、设定参数和显示、监控,同时数字化的显示面板也增添了柜面的统一性和美观性,使得配电室内的设备运行情况及故障状态一目了然,极大的方便了系统巡视和检修维护。互感器部分采用DIN35导轨式安装方式,方能够按照用户的测量需求,更换不同量程的电流互感器。http://www.acrel.cn/cn/download/common/upload/2011/02/25/17640cd.jpg图 62.8 软件设计 本产品的主软件流程图如图7所示,主程序包括A/D子程序、保护子程序、计算显示子程序、按键处理子程序、通讯子程序等子程序,由于程序内容较多,现只给出主程序流程和保护子程序流程图,见图8。http://www.acrel.cn/cn/download/common/upload/2011/02/25/17815ar.jpg图 7http://www.acrel.cn/cn/download/common/upload/2011/02/21/115832xd.jpg图 83 功能简介 ARD2智能电动机保护器按额定工作电压可分为AC380V、AC220V;按工作电流范围来分可分为6.3A(1.6A~6.3A)、25A(25A~100A)、100A(25A~100A)、250A(63A~250A)、800A(250A~800A)五个测量档位。实现对电动机运行中出现的启动超时、欠压、过压、欠载、过载、短路、堵转/阻塞、断相、不平衡、剩余电流(接地/漏电)等故障进行保护。并能在此基础上增加各种附加功能,主要有: 1)远程起动功能:由上位机通过通讯控制保护器的起动继电器,来实现远程起动电动机。 2)报警功能:当电动机运行状态出现故障时,在还未达到预先设定的脱扣时间前进行报警提示。 3)通讯功能:RS-485通讯功能,能够通过通讯接口将保护器检测得到的电动机运行的各种参数实时传送给后台主控设备,方便工作人员及时了解电动机的工作状态。 4)漏电保护:开放漏电保护监测功能,当电动机的运行环境出现漏电情况时,及时切断电动机的供电电源。 5)开关量输入:用于监测外部开关的分合状态,也可按客户要求进行起、停控制。 6)事件记录:记录保护器的最近8次脱扣动作产生的时间和原因,方便维护人员查看和检修。 7)4~20mA模拟量输出:提供直流4~20mA电流信号。 4 典型应用 图9为采用直接启动接线方式的ARD2智能电动机保护器典型应用图。用户可通过按动外部启动按钮SB2或通过上位机远程控制保护器的启动继电器来启动电机。其控制方式为:当启动按钮SB2按下或远程启动继电器7、8闭合,则接触器KM的吸引线圈处于通电状态,使接触器KM的主触头和自锁触头KM闭合,启动电动机。此时,松开SB2或启动继电器7、8断开后接触器KM的吸引线圈还是处于通电状态,主触头和自锁触头KM仍旧处于闭合状态,电动机处于通电状态。一旦电动机正常启动后,保护器就对电动机的运行状态进行监测,当电动机出现故障状态后,ARD2保护器的脱扣继电器动作,常闭触点95、96断开,使接触器KM的吸引线圈断电,使接触器KM的主触头和自锁触头的状态由合变为分,切断电动机的供电,使电动机停车。http://www.a
数控机床采用计算机控制,驱动系统具有较高的技术复杂性,机械部分的精度要求也比较高。因此,要求数控机床的操作、维修及管理人员具有较高的文化水平和综合技术素质数控机床的加工是根据程序进行的,零件形状简单时可采用手工编制程序。当零件形状比较复杂时,编程工作量大,手工编程较困难且往往易出错,因此必须采用计算机自动编程。所以,数控机床的操作人员除了应具有一定的工艺知识和普通机床的操作经验之外,还应对数控机床的结构特点、工作原理非常了解,具有熟练操作计算机的能力,须在程序编制方面进行专门的培训,考核合格才能上机操作。正确的维护和有效的维修也是使用数控机床中的一个重要问题。数控机床的维修人员应有较高的理论知识和维修技术,要了解数控机床的机械结构,懂得数控机床的电气原理及电子电路,还应有比较宽的机、电、气、液专业知识,这样才能综合分析,判断故障的根源,正确的进行维修,保证数控机床的良好运行状况。因此,数控机床维修人员和操作人员一样,必须进行专门的培训。(二)数控机床对夹具和刀具的要求数控机床对夹具的要求比较简单,单件生产时一般采用通用夹具。当批量生产时,为了节省加工工时,应使用专用夹具。数控机床的夹具应定位可靠,可自动夹紧或松开工件。夹具还应具有良好的排屑、冷却性能数控机床的刀具应该具有以下特点(1)具有较高的精度、耐用度,几何尺寸稳定、变化小。(2)刀具能实现机外预调和快速换刀,加工高精度孔时要经试切削确定其尺寸(3)刀具的柄部应满足柄部标准的规定(4)很好地控制切屑的折断和排出。(5)具有良好的可冷却性能。
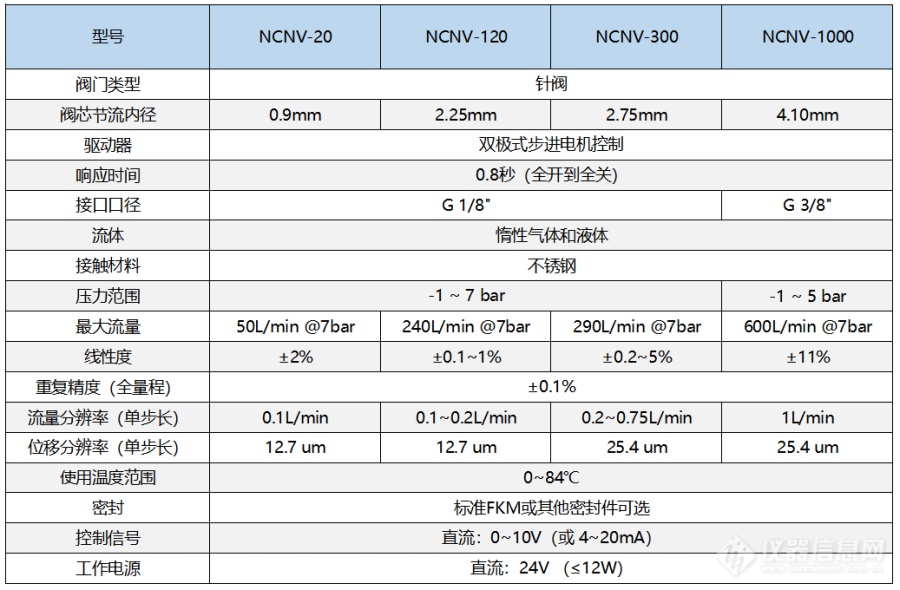
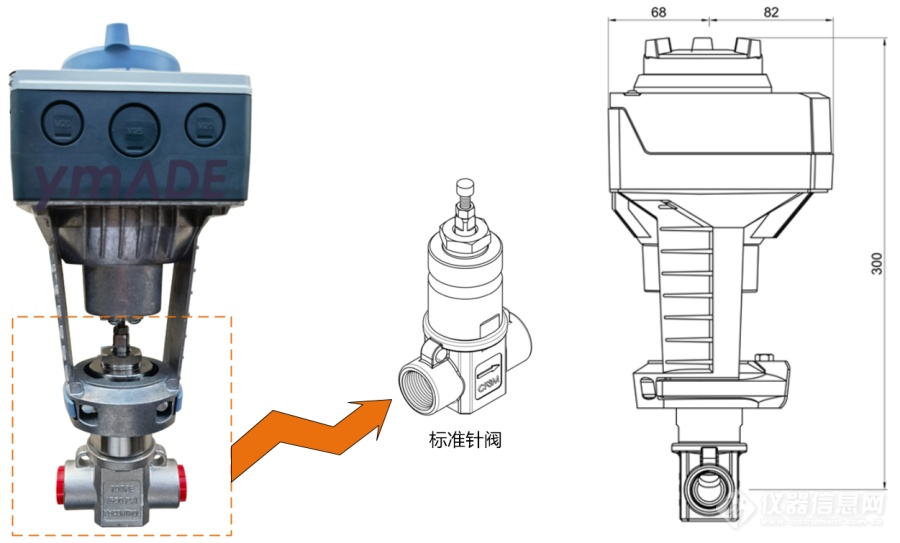
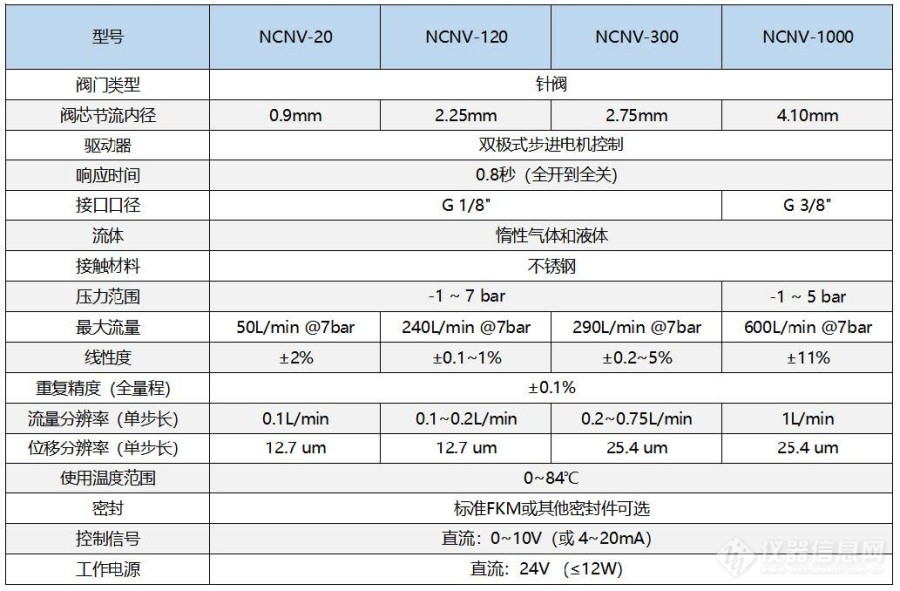
[align=center][img=电动针阀(电动针型阀),599,513]https://ng1.17img.cn/bbsfiles/images/2021/06/202106212250264749_7239_3384_3.gif!w599x513.jpg[/img][/align][size=18px][color=#990000]一、简介[/color][/size] 用于比例流量调节的NCNV系列数控电动针阀将步进电机的精度和可重复性优势与针阀的线性和分辨率相结合,其结果是具有小于2%滞后、2%线性、1%重复性和0.2%分辨率的可调流量控制,使这些电动阀门成为医疗、生命科学和高级自动化应用中一致、高性能气体传输和控制的理想选择,是目前常用电磁比例阀的升级产品。与依阳公司VPC2021系列真空压力控制器相结合,可构成快速准确的闭环控制系统。[size=18px][color=#990000]二、特点和优势[/color][/size] (1)多规格节流面积:从低流量的直径0.9mm(0~50L/min气体)到高流量的直径4.10mm(0到660 L/min气体)的多种规格针阀节流面积,可满足不同的应用需要。 (2)高度线性:小于2%的线性度,简化了查表或外部控制硬件和软件的配套,简化了命令输入和流量输出之间的关系。 (3)高重复性:通过每次达到0.1%的相同流量,NCNV系列电动针阀可提供长期稳定的一致性。 (4)宽压力范围:通过5或7bar巴的真空,取决于孔的大小,入口环境可覆盖宽泛的压力范围。电机的刚度和功率确保阀门在相同的输入指令下打开,与压力无关。 (5)低迟滞:小于2%的迟滞使积分和编程变得简单,在增加和减少达到设定点时能提供一致的流量。 (6)高分辨率:0.2%的分辨率允许NCNV系列电动针阀根据调节指令的微小变化进行最小流量调整,提供了出色的可控性。 (7)快速响应:整个行程时间小于1秒,由此可提供及时快速的流量调节和控制。[size=18px][color=#990000]三、技术指标和尺寸[/color][/size][align=center][size=18px][color=#990000][img=电动针阀技术指标,690,452]https://ng1.17img.cn/bbsfiles/images/2021/06/202106212253271035_4363_3384_3.png!w690x452.jpg[/img][/color][/size][/align][align=center][size=18px][color=#990000][img=电动针阀外形尺寸,690,422]https://ng1.17img.cn/bbsfiles/images/2021/06/202106212253521961_2022_3384_3.png!w690x422.jpg[/img][/color][/size][/align][size=18px][color=#990000]四、驱动模块附件[/color][/size] NCNV 系列数控电动针阀配备了一个步进电机驱动电路模块,以提供了所需电源和控制信号,並以将直流信号转换为双极步进电机的步进控制,同时也可提供 RS485 串口通讯的直接控制。[align=center][img=电动针阀步进电机驱动模块和尺寸,690,219]https://ng1.17img.cn/bbsfiles/images/2021/06/202106212254366571_5829_3384_3.png!w690x219.jpg[/img][/align][size=18px][color=#990000]五、典型应用[/color][/size](1)[url=https://bbs.instrument.com.cn/topic/7801687]用于小流量和真空压力高精度调节的灵巧型数控电动针阀[/url]

[color=#990000]摘要:目前亚硫酸法澄清工艺中普遍采用调节阀来控制磷酸液体的流量,但调节阀普遍存在耐腐蚀性差、响应速度慢和自动化水平低的问题。本文介绍了一种基于针型阀的新型耐腐蚀电动调节阀,采用了步进电机推进和FFKM全氟醚橡胶密封技术,具有可用于真空下的良好密封性能和微秒量级的响应速度,可采用直流电压信号或RS 485直接驱动,并已在蔗糖生产线得到了应用。[/color][size=18px][color=#990000]一、问题的提出[/color][/size]目前的蔗糖生产过程中普遍采用亚硫酸法澄清工艺,其中的磷酸自动控制系统要求能够进行磷酸的自动配比,并根据蔗汁流量实时连续自动调节磷酸添加量以保证磷酸添加的准确性。磷酸添加量控制是通过对浓度85%磷酸液体的流量进行调节,但存在以下迫切需要解决的难题:(1)耐腐蚀性差:85%浓度的磷酸液是一种无机中强酸,具有一定的腐蚀性,而目前绝大多数电动流量调节阀的耐腐蚀性普遍较差,无法用于硫酸流量调节。(2)自动化水平低:目前磷酸流量调节中大多还采用耐腐蚀的手动调节阀,磷酸添加准确性和及时性差影响产品质量,无法准确掌握磷酸使用情况。(3)精度差和响应速度慢:尽管也有用于流量调节电/气动球阀和蝶阀,但普遍口径太大,调节精度差,响应速度慢,无法满足磷酸流量ppm级调节精度要求。[size=18px][color=#990000]二、耐腐蚀精密电动调节阀[/color][/size]上海依阳实业有限公司开发的NCNV系列耐腐蚀数控电动针阀是一种灵巧型的电子式双向计量针阀,采用高精度直线步进电机驱动阀轴。[align=center][img=耐腐蚀电动调节阀,400,297]https://ng1.17img.cn/bbsfiles/images/2021/12/202112281632323226_702_3384_3.png!w603x449.jpg[/img][/align]主要技术指标如下:(1)接触材料:不锈钢;(2)密封材料:全氟醚橡胶(FFKM);(3)响应时间:0.8s(全关到全开);(4)流体:气体和液体;(5)压力范围:-1~7bar;(6)阀芯节流内径:0.9~4.1mm;(7)流量范围:0.1~2000L/m;(8)线性度:±0.1~±11%(9)重复精度:±0.1%(全量程);(10)使用温度范围:0~84℃;(11)控制信号:0~10VDC或RS485;(12)工作电源:24V(≤12W)。[align=center][/align][align=center]=======================================================================[/align]
数控光机是什么意思?用来做什么的呢?
[color=#ff0000]摘要:氢气供应系统作为燃料电池系统的重要组成部分,其空气侧与氢气侧之间压力差的动态控制对于整个燃料电池系统可靠性尤为重要。本文针对氢燃料电池系统氢气压力控制中存在的问题,推荐使用精密电动针阀,并详细介绍了电动针阀的特点和技术参数。[/color][align=center]~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~[/align][align=center][img=高精度快响应电动针阀在氢燃料电池系统氢气压力控制中的应用,690,518]https://ng1.17img.cn/bbsfiles/images/2021/08/202108101053487958_1868_3384_3.png!w690x518.jpg[/img][/align][size=18px][color=#ff0000]1. 问题的提出[/color][/size] 氢气供应系统作为燃料电池系统的重要组成部分,与电堆、空气供应系统、水热管理系统和电子电力系统协同工作,保证氢气流量、压力的稳定供应,并实现氢气循环利用。燃料电池氢气供应系统简化结构如图1-1所示。高压储氢罐是系统的氢气来源,氢气经过减压阀,压力降至适宜系统使用的范围,通常情况为几巴左右。氢气进气阀用于控制进入电堆的氢气量,进而控制电堆氢气回路的压力,目前常用的氢气进气阀为比例调节阀、开关阀或多个开关阀组。[align=center][color=#ff0000][img=燃料电池氢气供应系统简化图,690,66]https://ng1.17img.cn/bbsfiles/images/2021/08/202108101055206617_6144_3384_3.png!w690x66.jpg[/img][/color][/align][align=center][color=#ff0000]图1-1 燃料电池氢气供应系统简化图[/color][/align] 由于燃料电池自身膜电极的厚度逐渐降低,其机械强度相应下降,因此空气侧及氢气侧压力的动态控制对于整个燃料电池系统可靠性尤为重要,一般要求是氢气侧压力要等于或者稍高于空气侧压力,并且在调节两侧压力时要确保同升同降,以减少对质子膜的损害。然而,在目前氢燃料电池电源系统中,对于这两侧压差的控制存在以下几方面的问题: (1)采用开关阀进行氢气进气的控制,使得整个氢气回路中的波动太大而不易控制; (2)采用电磁比例阀尽管可以按照一定比例进行类似PID模式进行压力控制,但电磁比例阀由于存在较大磁滞现象,会带来控制不稳定的严重问题。 本文针对氢燃料电池系统氢气压力控制中存在的问题,推荐使用精密电动针阀,并详细介绍了电动针阀的特点和技术参数。[size=18px][color=#ff0000]2. 电动针阀[/color][/size] 电动针阀如图2-1所示。[align=center][img=各种规格电动针阀,599,513]https://ng1.17img.cn/bbsfiles/images/2021/08/202108101055582033_8168_3384_3.png!w599x513.jpg[/img][/align][align=center][color=#ff0000]图2-1 各种规格电动针阀[/color][/align][size=18px][color=#ff0000]2.1. 技术指标[/color][/size][align=center][color=#ff0000][img=电动针阀技术指标,690,453]https://ng1.17img.cn/bbsfiles/images/2021/08/202108101057223127_3501_3384_3.jpg!w690x453.jpg[/img][/color][/align][color=#ff0000][/color][align=center][color=#ff0000]图2-2 电动针阀技术指标[/color][/align][align=center] [img=电动针阀尺寸,690,421]https://ng1.17img.cn/bbsfiles/images/2021/08/202108101057371906_4688_3384_3.jpg!w690x421.jpg[/img][/align][align=center][size=16px][color=#ff0000]图2-3 电动针阀尺寸[/color][/size][/align][size=18px][color=#ff0000]2.2. 驱动模块[/color][/size] 数控电动针阀配备有步进电机驱动电路模块,以提供所需电源和控制信号,並以将直流信号转换为双极步进电机的步进控制,同时也可提供RS485串口通讯的直接控制。[align=center][color=#ff0000][img=驱动模块及其尺寸,690,220]https://ng1.17img.cn/bbsfiles/images/2021/08/202108101058555517_9466_3384_3.jpg!w690x220.jpg[/img][/color][/align][color=#ff0000][/color][align=center][color=#ff0000]图2-4 驱动模块及尺寸[/color][/align][size=18px][color=#ff0000]2.3. 特点[/color][/size] 新一代用于比例流量调节的数控电动针阀将步进电机的精度和可重复性优势与针阀的线性和分辨率相结合,其结果是具有小于2%滞后、2%线性、1%重复性和0.2%分辨率的可调流量控制,是目前常用电磁比例阀的升级换代产品。与各种PID控制算法和压力控制器相结合,可构成快速准确的氢气压力控制装置。 电动针阀具有以下几方面的特点: (1) 多规格节流面积:从低流量的直径0.9mm(0~50L/min气体)到高流量的直径4.10mm(0到660 L/min气体)的多种规格针阀节流面积,可满足不同的应用需要。 (2) 高度线性:小于2%的线性度,简化了查表或外部控制硬件和软件的配套,简化了命令输入和流量输出之间的关系。 (3) 高重复性:通过每次达到0.1%的相同流量,可提供长期稳定的一致性。 (4) 宽压力范围:通过5或7bar的压力,取决于孔的大小,入口环境可覆盖宽泛的压力范围。电机的刚度和功率确保阀门在相同的输入指令下打开,与压力无关。 (5) 低迟滞:小于2%的迟滞使积分和编程变得简单,在增加和减少达到设定点时能提供一致的流量。 (6) 高分辨率:0.2%的分辨率允许电动针阀根据调节指令的微小变化进行最小流量调整,提供了出色的可控性。 (7) 快速响应:整个行程时间小于1秒,由此可提供及时快速的流量调节和控制。[align=center]~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~[/align][align=center][/align][align=center][img=,690,355]https://ng1.17img.cn/bbsfiles/images/2021/08/202108101059518215_4501_3384_3.jpg!w690x355.jpg[/img][/align][align=center][/align][align=center][/align]
1. 加工零件及其工艺分析与手动编程一样,加工零件及其工艺分析是数控编程的基础。目前这项工作主要还需人工来做,随着CAPP技术的发展,将逐渐由CAPP来完成。主要任务有:(1) 零件几何尺寸、公差及精度要求的标准;(2) 确定加工方法、工夹量及刀具;(3) 确定编程原点及编程坐标系;(4) 确定走刀路线及工艺参数;2. 加工部位造型与前述相同,有三种方法获取和建立零件几何模型:(1) 利用软件本身的CAD设计模块;(2) 将其他CAD/CAM系统生成的图形,通过标准图形转换接口,转换成本软件系统的图形格式;(3) 利用三坐标测量机数据或三维多层扫描数据。3. 工艺参数输入将工艺分析中的工艺参数输入到自动编程系统中,常见的工艺参数有:(1) 刀具类型、尺寸与材料;(2) 切削用量,如主轴转速、进给进度、切削深度及加工余量等;(3) 毛坯信息,如尺寸、材料等;(4) 其他信息,如安全平面,线性逼近误差、刀具轨迹间的残留高度、进退刀方式、走刀方式、冷却方式等。4. 刀具轨迹生成与编辑自动编成系统将根据几何信息与工艺信息,自动完成基点和节点计算,并对数据进行编排,形成刀位数据;刀位轨迹发生后,自动编程系统将刀具轨迹显示出来,如果有不合适的地方,可在人工交互方式下对刀具轨迹进行编辑与修改。5. 刀具国际的验证与仿真自动编程系统提供验证与仿真模块,可以检查刀具轨迹的正确性与合理性。验证模块指通过模拟加工过程来检验加工中是否过切,刀具与约束面是否发生干涉与碰撞等;仿真模块是将加工过程中的零件模型、机床模型、夹具模型及刀具模型用图形动态显示出来,基本具有尚且加工的效果。6. 后置处理将刀位数据文件转换为数控装置能接受的数控加工程序。7. 加工程序输出(1) 将加工程序利用打印机打印清单,供人工阅读;(2) 将加工程序存入存储介质,包括穿孔纸带、磁盘、光盘和U盘等,用于保存或转移到数控机床上使用;(3) 通过标准通信接口,将加工程序直接送给数控装置;脉搏制造网——机械加工行业b2b服务平台
经济型数控机床的主要特点是价格便宜,功能针对性强。一般情况下,普通机床改装成简易数控机床后可以提高工效1~4倍,同时能降低废品率,提高产品质量,又可减轻工人劳动强度。改造费用通常一年左右就可以收回。一般用单板微计算机作为控制装置,用步进电机为执行机构,将普通机床改造成简易数控机床。经改造后的机床既保留了原机床的通用性,又增加了许多传统机床所没有的特点,如自动对刀、间隙补偿、自动调整进给速度、自动回原点等功能。这种机床尤其适用于杆轴类、盘类零件以及带有锥度、球面的中等复杂程度零件的频繁、轮番加工。 数控系统的工作过程如下: (1)输入大量的零件加工程序一般通过通信方式从外部计算机输人而来。数控系统一般有两种不同的输人工作方式:一种是边输人边加工(即通常所说的DNC方式),这种方式用于较长程序,也就是复杂零件的加工;另一种是一次将琴件加工程序全部输人数控系统内部的存储器,加工时再由存储器一段一段地读出进行零件加工。具体采用哪种方式,视数控系统存储器的存储量而定。 (2)译码输人的程序段含有零件的轮廓信息(起点、终点、直线、圆弧等)、要求的加工速度以及其他的辅助信息(换刀、主轴转速、进给速度、冷却液等)。系统计算机依靠译码程序来识别这些指令符号,译码程序将零件加工程序翻译成系统计算机内部能识别的语言。 (3)数据处理数据处理一般包括刀具半径补偿、速度计算以及辅助功能的处理。数控刀具半径补偿是根据刀具半径值把零件轮廓轨迹转化为刀具中心轨迹。速度计算是解决该加工程序段以什么样的速度运动的问题。另外还有辅助功能如换刀、冷却液等数据的处理。 (4)插补(即轴进给运动)在机床的实际加工中,被加工上件的轮廓形状千差万别。严格说来,为了满足几何尺寸精度的要求,刀具中心轨迹应该准确地依照工件的轮廓形状生成。对于简单的曲线,数控系统易于实现,但对于较复杂的形状,若直接生成刀具中心轨迹,势必会使计算方法变得很复杂,计算工作量也相应地大大增加。因此,在实际应用中,常常采用一小段直线或圆弧去逼近(或称为拟合)曲线,有些场合也叮以采用抛物线、椭圆、双曲线和其他高次曲线去逼近曲线。所谓插补,是在已知一条曲线的种类、起点、终点以及进给速度后,在起点和终点之间进行数据点的密化,从而用多段简单曲线来逼近复杂曲线。数控系统经过插补运算后向伺服系统发出指令,从而实现各坐标轴的进给运动,完成零件的加上。脉搏制造网-外协加工-机械加工-数控加工-专注加工制造业B2B平台
数控系统和功能部件成为接线端子行业瓶颈 时间 国产中档数控系统国内市场占有率只有35%,而高档数控系统95%以上依靠进口。功能部件国内市场总体占有率约为30%,其中高档功能部件市场占有率更低。数控系统和功能部件发展滞后已成为制约我国接线端子行业发展的瓶颈。 据国家海关统计数据,2010年我国进口数控系统金额达18.1亿美元,机床附件(含功能部件和夹具)类产品达16.2亿美元。我国机床工具行业产品质量整体水平已经有了很大提高,但在产品质量的稳定性和可靠性方面,例如:机床早期故障率较高,精度稳定性周期短,工程能力系数(CPK值)、平均无故障工作时间(MTBF)等指标与国际先进水平比较尚有一定差距。机床工具行业属于技术密集、资金密集、人才密集的产业,具有多门类、多品种、小批量、高社会效益等产业秉性。 目前行业配套的中高档数控系统和关键功能部件主要依赖进口,多数产品技术附加值偏低,产业整体还处于国际产业链的中低端,行业整体经济效益偏低,盈利能力较差,与发达国家相比仍存在一定差距。加之我国模具设计开发及模具技术的精密度还有待提高,大部分的模具企业仍在模具行业低位挣扎,重复建设、恶性竞争现象普遍存在,严重的制约了模具企业的发展。同时也制约了国内接线端子整体行业的发展。 要加快我国接线端子产业的调整和优化布局,不仅是接线端子企业的产品开发和技术创新,同时也是整个产业链资源的优化和提升,机床数控和模具的精密度和稳定性提高显得尤为重要。本文转载:亚洲流体机械产品网
摘 要:针对低压智能电动机保护器在实际使用中遇到的各种电磁兼容问题,根据微处理器系统的特点从硬件和软件两个方面,提出了抗干扰方法,获得了良好的EMC性能。关键词:微处理器;EMC电磁兼容性;软件;硬件;抗干扰1 引言 电动机作为一种拖动机械因具有结构简单、价格低廉、使用维护方便等优点,在国民经济各个方面被广泛采用。在当代,随着电子技术的发展和智能电动机保护器技术的成熟而普及率越来越高。 智能电动机保护器采用了微处理器技术,不仅解决了传统的热继整定粗糙、不能实现断相保护,重复性差、测量参数误差大的缺点。保护器通过电流来判断断相故障,软件模拟热积累过程的方法来实现过载保护等方法保证了电机的可靠运行,而微处理器强大的扩展性包括开关量输入、继电器输出,4~20mA变送输出、RS485通讯等很好的满足了控制系统的“四遥”功能。 电动机保护器提高了电动机运行的可靠性和系统智能化要求,因此保护器的可靠运行起着举足轻重的作用,同时也对保护器抗外界干扰提出了比较现实的要求。下面就从硬件和软件两个方面提出可靠性设计。2 硬件可靠性设计2.1 微处理的选择 采用Freescale公司的高性能处理器MC9S08AW60。MC9S08AW60是Freescale公司一款基于S08内核的高度节能型处理器,是第一款认可用于汽车市场的微控制器。可应用在家电、汽车、工业控制等场合,具有业内最佳的EMC性能。2.2 电源端滤波处理 利用电磁原理进行硬件电路滤波是提高保护器EMC的有效方法。线路如下图,经热敏电阻t、压敏电阻RV1、电感L1、L2、差模电容C1、共模电感L3、共模电容C2、C3组成的两级滤波处理,很好的隔离了由于电源端的输入和输出干扰。PTC热敏电阻器的主要用于过流过热保护,直接串在负载电路中,在线路出现异常状况时,能够自动限制过电流或阻断电流,当故障排除后又恢复原态,俗称“万次保险丝”。根据线路的最大工作电流来确定选择。压敏电阻主要用于吸收各种操作浪涌及感应雷浪涌过压保护,以防止这类过电压干扰或损坏各种电路元件。根据设计经受的浪涌电压按照最大允许使用电压和通流容量来选择。其中,L1、L2、C1为抑制差模干扰,L3、C2、C3为抑制共模干扰。L1、L2铁芯应选择不易饱和的材料及M-F特性优良的材料。按照IEC-380安全技术指标推荐,图中元件参数的选择范围为:C1=0.1~2uF;C2、C3=2.2~33uF;L3为几个或几十毫亨,随工作电流不同而取不同的参数值。 按照下面公式计算C2、C3的容量: Ii=2πfCyU 式中:Ii───允许的交流漏电流 f───电源频率; U───电源供电电压; 上图为电源端是否使用滤波器,使用瑞士TRANSIENT 2000电磁兼容测试仪1000V 100KHZ 0.75mS条件EFT群脉冲实验,从TEXtronix TDS1012B捕抓到的信号比较,未使用滤波处理的电源输出端产生了尖峰脉冲,会导致微处理器复位,甚至死机。2.3 信号端处理 谐波和电磁辐射干扰会导致保护器误动作,使电气仪表计量不准确,甚至无法正常工作。在电动机控制回路中产生该类干扰源为变频器和现场对讲机。解决的方法有:一是信号输入线胶合,胶合的双胶线能降低共模干扰,由于改变了导线电磁感应的磁通方向,使其感应互相抵消。二是内部线路处理。如下图,采用双差分输入的差动放大器,具有很高的共模抑制比。在输入回路中接RC滤波器、信号的输入和输出端使用专用器件、降低输入输出阻抗、可靠接地和合理的屏蔽等措施。2.4 保护输出端处理 输入输出端采用光电隔离的方法,也是可以消除共模干扰,同时在保护继电器的的输出端并接压敏电阻,有效的提高了继电器的寿命,也降低了由于外部接触器动作对内部的干扰。考虑到客户使用控制电压的不确定性和接触器线圈容量,确认使用MYG14D821。2.5 外部存储技术和看门狗保护电路 使用外置存储芯片X25043,SPI接口。微处理器内置SPI控制模块,方便的与该芯片接口,外部存储技术保证了运行状态和事件的记录。低电压复位和外部看门狗提高了保护器的可靠性。2.6 主体与显示单元通过RS485连接 考虑到使用环境的特殊性和要求的多样性,主体与显示单元之间连接也采用RS485 Modbus-Rtu协议连接,提高了显示与控制的可靠性。 3 软件可靠性设计3.1 实时多任务的调度 保护器起着保护电动机的重任,对它的要求是既不能误动,也不能拒动,而且必须快速。实时多任务的调度实际是通过时间片的轮换实现宏观上的多任务效果。对于保护器而言,存在着三个重要的任务,等间隔的交流采样,根据算法得到稳态与暂态电量数据;根据得到的数据判断故障,故障计时、清零和脱扣输出;人机交互界面。下图以一个周波T=20mS,32点采样为例(考虑到快速除法),32次采样总时间为3.2mS,数据计算时间为9.72mS, 计时0.36mS,则人机交互的时间为6.72mS。这样的任务调度即满足了保护实时性要求,又较快的响应了参数设置。3.2 交流采样、数字滤波 对于交流正弦信号,一个周期的电压有效值为 根据电工原理中连续周期交流信号的有效值的定义,将连续信号离散化,用数值积分代替连续积分,从而得到有效值与采样值之间的关系。离散化得到 在对信号多次采样的基础上,通过软件算法提取最逼近真值的数据。这种算法计算连续的周期的交流信号,精度高,抗波形畸变能力强。在使用这种算法时,也可同时采用连续平均值法、中值算法等数字滤波,提高保护器的抗干扰能力。3.3 软件陷阱 程序是固化在微处理器的存储器中,由编译器统一安排,但设计时,设计人员考虑到产品的扩展性,一般留有余量,也因此总有些存储空间会未被使用。当微处理器的PC指针因为干扰被错置时,系统就会出错。软件陷阱就是在不用的存储空间、中断入口、子程序后加入强制跳转指令,让出错的PC指针恢复正常。 方法是:NOP NOP JSR MAIN4 结束语 本文针对低压智能电动机保护器在实际使用中遇到的各种电磁兼容问题,根据微处理器系统的特点从硬件和软件两个方面,提出了抗干扰方法,获得了良好的EMC性能。
[b][font=微软雅黑][color=#333333][font=微软雅黑]阀门电动执行器[/font][/color][/font][/b][font=微软雅黑][color=#333333][font=微软雅黑]是实现阀门程控、自控和遥控不可缺少的驱动设备,其运动过程可由行程、转矩或轴向推力的大小来控制。工作特性和利用率取决于阀门的种类、装置工作规范及阀门在管线或设备上的位置。[/font][/color][/font][font=微软雅黑][color=#333333][/color][/font][font=微软雅黑][color=#333333][font=微软雅黑] 阀门电动执行器工作原理:[/font][/color][/font][font=微软雅黑][color=#333333][/color][/font][font=微软雅黑][color=#333333][font=微软雅黑] 该执行器由电动机驱动,通过蜗轮蜗杆减速,带动空心输出轴转动。在该减速箱中,具有手动[/font]/自动机构(手动机构可独立进行操作)。当切换手柄处于手动位置时,操作手轮,带动空心输出轴转动。当电动操作执行机构时,手动机构处于断开状态,由电动机驱动空心输出轴。阀门电动执行器基本上是一个减速电机。电机可以具有各种电压,并且是主要的转矩产生部件。为防止因过度劳动或过度耗电而造成的热损伤,电机通常配有嵌入电机绕组的热过载传感器。该传感器与电源串联,并在电机过热时打开电路,然后在电机达到安全工作温度时关闭电路。电动机由电枢,电气绕组和齿轮组组成。当向绕组供电时,产生磁场,引起电枢旋转。只要有绕组通电,电枢就会转动 当电源切断时,电机停止。行程限位开关的标准末端,这是电动执行器所必需的,可以处理这个任务。[/color][/font][font=微软雅黑][color=#333333][/color][/font][font=微软雅黑][color=#333333][font=微软雅黑] 阀门电动执行器依靠直接连接到电动机的齿轮系来增强电动机转矩并决定致动器的输出速度。改变输出速度的一个方法是安装周期长度控制模块。该模块只允许增加周期时间。如果需要减少循环时间,则必须使用具有所需循环时间和适当输出扭矩的备用执行机构。[/font][/color][/font][font=微软雅黑][color=#333333][/color][/font][font=微软雅黑][color=#333333][font=微软雅黑] 阀门电动执行器的优势:[/font][/color][/font][font=微软雅黑][color=#333333][/color][/font][font=微软雅黑][color=#333333][font=微软雅黑] [/font]1.功能强劲:智能调节型、开关型、各类信号输出型应有尽有;[/color][/font][font=微软雅黑][color=#333333][/color][/font][font=微软雅黑][color=#333333][font=微软雅黑] [/font]2.体小量轻:[/color][/font][b][font=微软雅黑][color=#333333][font=微软雅黑]阀门电动执行器[/font][/color][/font][/b][font=微软雅黑][color=#333333][font=微软雅黑]体积和重量仅相关于传统产品的[/font]35%左右;[/color][/font][font=微软雅黑][color=#333333][/color][/font][font=微软雅黑][color=#333333][font=微软雅黑] [/font]3.美观大方:铝合金压铸外壳、精美流畅、且可减少电磁干扰;[/color][/font][font=微软雅黑][color=#333333][/color][/font][font=微软雅黑][color=#333333][font=微软雅黑] [/font]4.性能可靠:轴承和电气元件竺关键零部件采用进口品牌平品;[/color][/font][font=微软雅黑][color=#333333][/color][/font][font=微软雅黑][color=#333333][font=微软雅黑] [/font]5.高标防护:IP68高标准防护等级;[/color][/font][font=微软雅黑][color=#333333][/color][/font][font=微软雅黑][color=#333333][font=微软雅黑] [/font]6.精密耐磨:蜗轮部件采用特殊合金材料锻造;[/color][/font][font=微软雅黑][color=#333333][/color][/font][font=微软雅黑][color=#333333][font=微软雅黑] [/font]7.回差极小:结构无间隙联结、传动精度高;[/color][/font][font=微软雅黑][color=#333333][/color][/font][font=微软雅黑][color=#333333][font=微软雅黑] [/font]8.安全保证:通过1500V耐压检测、F级绝缘电机,安全有保障;[/color][/font][font=微软雅黑][color=#333333][/color][/font][font=微软雅黑][color=#333333][font=微软雅黑] [/font]9.配套简单:采用单相电源、外接线路简单、也可做380V和直流电源;[/color][/font][font=微软雅黑][color=#333333][/color][/font][font=微软雅黑][color=#333333][font=微软雅黑] [/font]10.使用方便:免加油、免点检、防水防锈、任意角度安装;[/color][/font][font=微软雅黑][color=#333333][/color][/font][font=微软雅黑][color=#333333][font=微软雅黑] [/font]11.多种速度:全程时间9秒、13秒、15秒、30秒、50秒、100秒、150秒(出厂前已设定);[/color][/font][font=微软雅黑][color=#333333][/color][/font][font=微软雅黑][color=#333333][font=微软雅黑] [/font]12.智能数控:智能数控模块集成于[/color][/font][b][font=微软雅黑][color=#333333][font=微软雅黑]阀门电动执行器[/font][/color][/font][/b][font=微软雅黑][color=#333333][font=微软雅黑]本体内,无需外接定位器,数字设定,数字整定,高定,自我诊断,一机多能。[/font][/color][/font][font=微软雅黑][color=#333333][/color][/font]
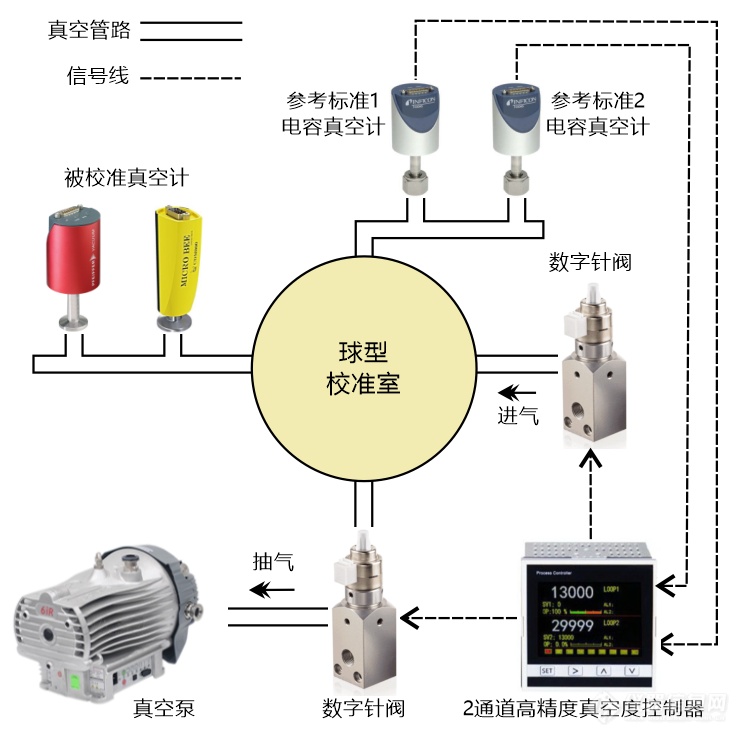
[color=#ff0000]摘要:针对便携式真空计校准装置以实现真空计的现场校准,基于静态比对法校准技术,本文提出了一种采用微型数字针阀和上下游双向气体流量调控模式的技术方案,结合双通道高精度的真空度PID控制器,可在真空度精密控制的前提下解决现场校准和便携性问题。[/color][align=center]~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~[/align][size=18px][color=#ff0000]一、问题的提出[/color][/size]真空计作为一种真空度传感器在众多领域应用普遍,并需要进行定期校准。而真空计校准装置是包含了真空标准器、真空泵、真空阀门及连接管路在内的一整套测量系统,一般体积较大,不便移动,多在实验室内固定使用。现有的真空计校准方式大多是将现场使用的真空计拆下送检。为满足现场校准的需求,需要解决以下几方面的问题:(1)减小相关部件的尺寸,使真空计校准装置便于携带。(2)采用数控和电动阀门,提高气体流量调节的精密度。(3)改进真空度控制方式,提高真空度控制精度和稳定性。为实现真空计 现场校准和校准装置的便携性,基于静态比对法校准技术,本文将提出采用微型数字针阀和上下游双向气体流量调控模式的技术方案,结合高精度的真空度PID控制器,可在真空度精密控制的前提下解决现场校准和便携性问题,真空度的波动可控制在±1%以内。[size=18px][color=#ff0000]二、便携式真空计校准装置技术方案[/color][/size]便携式真空计校准装置的整个结构如图1所示,这里示出的是0.1~760Torr真空度范围内的校准装置典型结构示意图。方案具体内容如下:[align=center][img=真空计校准,600,596]https://ng1.17img.cn/bbsfiles/images/2022/05/202205261606551375_610_3384_3.png!w690x686.jpg[/img][/align][align=center]图1 便携式真空计校准装置结构示意图[/align](1)采用静态比对法,将被校准真空计与参考标准真空计比对。参考标准真空计采用两个电容薄膜真空计以覆盖整个真空度校准范围,参考标准真空计也同时作为真空度控制传感器。(2)真空度控制器采用二通道高精度真空度控制器,控制器的A/D为24位,D/A为16为,可对应电容薄膜真空计的高精度信号输出和满足真空度控制精度要求。控制器的两个通道分别对应于两个真空计的输入信号、两路数字针阀的进气和抽气流量的精密调节。在真空度控制过程中两路传感器信号可根据需要自动切换,以实现全量程范围内的可编程自动控制。控制器带PID自整定功能和标准的MODBUS通讯协议。(3)采用两个数字针阀分别调节进气和抽气流量,控制器采用双向模式分别对两个针阀进行调节。在粗真空范围内主调节进气针阀,在高真空范围内主调节进气针阀,全量程范围内的真空度恒定控制时,真空度波动率可控制在±1%以内。[align=center]~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~[/align]
数控超声波清洗器使用应注意什么? 我检查实验室发现数控超声波清洗器正在使用,咕咕冒开水,并清洗着东西,旁边也没有人,是不是这样不安全,我想应该有个警示标志,这样不容易出现安全事故,哪位同行能说一下确切的注意事项。谢谢了!
关于活性污泥法工艺参数控制方面问题有不少网友问过我关于活性污泥工艺参考数控制方面的问题,虽然这方面专业书上都有介绍,但大多是局限于理论上的,所以对工艺运行参数有一个实践应用中的理解问题,如回流污泥量和回流比,如果按专业书介绍的方法来控制将会造成很大的负面影响,据我所知,不少处理装置都存在不少问题。以下根据回复网友在关于这方面的提问,以问答形式说明关于回流污泥量和回流比的问题,供各位参考。问:污泥回流比是回流污泥量与进水量之比,相关专业书认为活性污泥工艺中污泥回流比应该相对稳定,如果这样的话,回流污泥量就要根据进水量的变化而变化,实际运行中是否应该这样控制?答:不能这样做,在运行管理中,污泥回流比只能起参考作用,我们说的回流污泥量也不含有浓度的概念,实际上回流污泥量是不可任意调节的,它受限于污泥性质和二沉池运行状态等因素。问:为什么你说回流污泥量不含浓度的概念? 答:这就要说到二沉池的作用,二沉池的作用主要是泥水分离和回流污泥浓缩,如要增加回流污泥量,必须增加二沉池的出泥量,这样二沉池的污泥层会下降,使污泥在二沉池的浓缩时间减少,此时,进曝气池的回流污泥量虽增加,但回流污泥的浓度却下降,回流至曝气池的污泥绝对量并不会增加。 问:按你这样说,如果进水水量增加了,为了使污泥负荷相对稳定,又如何来增加曝气池污泥浓度呢?答:增加曝气池污泥浓度的办法就是停止剩余污泥排放或少排泥。问:不少专业书上都介绍了回流污泥量的估算式,如:用污泥沉降体积、污泥指数等方法来估算回流污泥量,按你前面所说的,难道这些估算方法都不对吗? 答:也不能这样说,书上的这些估算式中不可能都考虑到污泥性质和二沉池的运行状况等诸多因素的,是纯理论性的,它可使我们了解主要参数的相互间关系,从这个意义上说没有错,如果在日常运行中完全按估算式来控制,那就错了,有时甚至会造成严重的负面影响和后果。问:能解释一下“有时甚至会造成严重的负面影响和后果”这话的意思吗? 答:由于活性污泥系统的污泥是在曝气池和二沉池之间循环流动的,按前面的计算法,污泥沉降性能差是就要增加污泥回流比,这样的话,由于回流量增加,废水在曝气池的实际停留时间相对减少,而进二沉池混合液量又增加,使二沉池进水水能增大,严重影响泥水分离,更易造成漂泥,从而造成恶性循环。 问:以你之见,在日常运行中回流污泥量应该如何控制呢?答:尽可能稳定回流污泥量,污泥回流比可以变化,当然回流污泥量的稳定也是相对而言的,可根据二沉池污泥层的高度来小范围调节,而不是有些专业书说的根据进水量来调节。 如前所述,二沉池的作用主要是泥水分离和回流污泥浓缩。故在这种情况下,应该在不影响泥水分离的前提下,二沉池的污泥层应该适当高一些,这样回流污泥量虽然减少,但其浓度会提高,进入曝气的污泥量并不会减少。问:你说回流比可以有较大的变化,难道运行中就不用控制了答:没错!要控制的是回流污泥量,我认为回流比是设计参数而不是工艺运行参数,在设计上有用,如污泥污泥管的通量和回流污泥泵的配制等。上篇关于回流污泥量控制原则中说到“在不影响泥水分离的前提下,二沉池污泥层应适当控制高一些”,可能有人会有疑问或异议,并担心产生其他负面影响,如沉淀池污泥易缺氧,在有硝酸氮存在时易发生反硝化而导致部分污泥上浮。 要说明的是:我只是说污泥层“适当”控制高一些,我上篇中提出回流污泥量要相对稳定,并没说不能调节,但只能是小范围内波动;沉淀池污泥层高易引起污泥缺氧而发生反硝化与污泥层高有关系,但防止这样的情况发生关键是要在曝气池缺氧区尽可能去除硝酸氮,没有反硝化功能的系统,也可在好氧区控制同步硝化-反硝化条件来降低硝酸氮,此外,曝气池DO控制高一些也可减少或避免上述情况的发生,也就是说对类似的问题要有正确的综合分析思路。

干式运输型液氮罐在现代物流中扮演着重要的角色。这种特殊的液氮罐能够安全、高效地储存和运输液体氮气,被广泛应用于医疗、化工、半导体等领域。 然而,在使用过程中,液氮罐的温度和压力控制是至关重要的,这直接关系到液氮罐内液氮的稳定性和可靠性。为了提高效率和保障安全,智能控制系统成为必不可少的一部分。本文将探讨干式运输型液氮罐智能控制系统的设计与优化。 首先,我们需要了解液氮罐的基本工作原理。干式运输型液氮罐主要由罐体、内胆、真空绝热层和控制系统组成。当液体氮气进入储罐后,通过真空绝热层的保护,减少了热量的传输,从而保持液态状态。而控制系统则对液氮罐的温度和压力进行监测和控制,以确保液氮罐内的环境始终稳定。[img=液氮罐,400,372]https://ng1.17img.cn/bbsfiles/images/2023/11/202311301123439518_1703_3312634_3.jpg!w400x372.jpg[/img] 传统的液氮罐控制系统通常采用传感器和人工操作的方式来实现温度和压力的监测与调节。然而,这种方式存在着人工操作不准确、反应迟缓等问题,同时也增加了人工成本。因此,智能控制系统应运而生。 智能控制系统通过集成传感器、执行器、控制算法和通信技术,能够实时监测和控制液氮罐的温度和压力。首先,通过温度传感器和压力传感器采集罐内环境的数据,并将其传输给控制器。控制器根据预设的参数和算法进行数据处理,判断罐内环境的状态,并根据需要发送控制信号给执行器。 在控制信号的作用下,执行器可以自动调节液氮罐的温度和压力。例如,当温度过高时,控制系统可以启动冷却装置将温度降低 当压力过大时,控制系统可以通过排气阀门释放部分气体来降低压力。通过智能控制系统的优化和升级,液氮罐的温度和压力控制将更加准确和高效。 此外,智能控制系统还具有远程监控和故障诊断的功能。通过通信技术,控制系统可以与上位机或云平台进行数据交换和传输,实现远程监控。操作人员可以随时查看液氮罐的运行状态和数据,并根据需要进行调整和控制。同时,智能控制系统可以对液氮罐进行故障诊断,及时发现并报警故障,提高维护效率和减少停机时间。 总之,干式运输型液氮罐(www.cnpetjy.com)的智能控制系统在提高效率和保障安全方面具有重要作用。通过集成传感器、执行器、控制算法和通信技术,智能控制系统能够实时监测和控制液氮罐的温度和压力,实现自动化调节 同时,还能够实现远程监控和故障诊断,提高了运行效率和可靠性。未来,随着技术的不断进步,液氮罐智能控制系统的功能和性能还将进一步提升,为物流行业带来更多的便利和效益。
数控CNC设备能够加工高精度的聚合物材质芯片产品(PMMA,PC,ABS,TEFLON等工程塑料)和金属材质(铝、镍和不锈钢等),汶颢芯片数控加工通道宽度最小极限为150μm,深度极限视加工特征定性,最大加工范围为400*400*260cm,配合高精度检测设备,控制产品尺寸精准,表面粗糙度微小,能够满足要求较高的实验需求。以下是数控加工不同微流控芯片材质的选择比较和说明。PMMA与PC1.PC韧性比PMMA高,但切削后成形不如PMMA;2.PMMA芯片流道粗糙度效果更好;2.PMMA硬度比PC高,故表面比PC耐刮伤;3.表面看无区别,查询了透光参数,PMMA胜于PC,PMMA也是透明材质里面最好的!4.PC比PMMA 阻燃性好,耐温效果PC略胜,有高温要求选PC;5.对于有低温要求的客户芯片,建议选用PMMA,抗氧化效果PC也不如PMMA。http://www.whchip.com/upload/201610/1476753403364995.png特氟龙1.密度值高,重;2.有一定的韧性,进行密封连接可能更好;3.铁氟龙和特氟龙是一个东西;4.乳白色。http://www.whchip.com/upload/201610/1476753461368352.pngABS1.有黑色,也有白色,米色,浅象牙色;2.易切削,如果需要选用太薄,易变形,也要考量。能够采用注塑方法加工的工程塑料理化特性材质俗称密度(g/cm3)转折温度Tg(℃)热变形温度(℃)电阻率(Ω/cm)水含量(%)折射率杨氏模量(MPa)热膨胀系数(10-6/K)抗不抗有机试剂耐受性PMMA有机玻璃、树脂玻璃1.1911090101521.492320080酸、中低浓度碱、油、石油乙醇、丙酮、苯、紫外基本不耐PC聚碳酸酯1.19-1.2414812510140.31.58-1.62200-240070乙醇、酸烃类、酮类、氢氧化钾基本不耐PP聚丙烯纤维0.90-10100-11010140.01-0.11.491450100-200酸、碱、乙醇、有机溶剂石油、苯、烃类二甲苯、四烃化萘、萘烷PS聚苯乙烯0.9-1.241007010160.41.592300-410030-210碱、乙醇强酸、乙醚、烃类基本不耐PE(LD/HD)聚乙烯0.91(LD)/0.967(HD)110/14080/1001015-10180.0151.51(LD)200/1000170/200酸、碱、乙醇、油烃类三氯苯、二甲苯、己烷COC环烯烃共聚物1.027817010140.011.53260070酸、碱--COP环烯烃聚合物1.0113814010170.011.525240070---PEEK聚醚醚酮1.314325010160.5-370017多数有机和无机物质浓硝酸、硫酸、紫外-PDMS聚二甲基硅氧烷1.03-1202001.2X10140.11.43-[/td
GBT 24470-2009 中凹形弹簧数控卷簧机 技术条件
[size=16px][color=#339999][b]摘要:化学药液流量的精密控制是半导体湿法清洗工艺中的一项关键技术,流量控制要求所用调节针阀一是开度电动可调、二是具有不同的口径型号、三是高的响应速度,四是具有很好的耐腐蚀性,这些都是目前提升半导体清洗设备性能需要解决的问题。为此,本文提出了相应的解决方案,解决方案的核心是采用具有系列口径的高速和耐腐蚀的电动针阀。[/b][/color][/size][align=center][size=16px][img=高速耐腐蚀电动针阀流量控制在前道化学清洗机中的应用,550,271]https://ng1.17img.cn/bbsfiles/images/2023/04/202304261136485023_8685_3221506_3.jpg!w690x341.jpg[/img][/size][/align][size=18px][color=#339999][b]1. 问题的提出[/b][/color][/size][size=16px] 湿法蚀刻清洗工艺(如RCA清洗)是半导体制造工艺步骤中数量最多的工艺,湿法清洗的目的是去除晶圆上前一道工序的残留或者副产物,使之不进入后续工序。一般通过化学药液与晶圆表面去除物的反应,或改变不同特性化学清洗液处理以后的晶圆表面亲水性,达到去除残留物的目的。其中,化学反应强烈程度与温度、浓度、化学药液的反应量密切相关,而蚀刻量是检测此化学反应强烈程度的重要手段。因此,刻蚀量是湿法刻蚀工艺中最重要的工艺控制参数之一,而影响蚀刻量的三大因素分别是化学药液温度、化学药液浓度和化学药液流量,其中药液浓度和流量都与流量控制密切相关。典型的化学药液循环系统结构如图1所示。[/size][align=center][size=16px][color=#339999][b][img=01.化学药液循环系统结构示意图,690,247]https://ng1.17img.cn/bbsfiles/images/2023/04/202304261138411498_3193_3221506_3.jpg!w690x247.jpg[/img][/b][/color][/size][/align][align=center][size=16px][color=#339999][b]图1 化学药液循环系统结构示意图[/b][/color][/size][/align][size=16px] 针对当前和未来的湿法刻蚀清洗工艺,用于药液流量控制的针阀需要满足以下几方面要求:[/size][size=16px] (1)首先针阀要求是可电控针阀,如图1所示,由电动针阀、流量计和PID控制器可组成闭环控制回路,通过电动针阀的开度精细变化,可极大保证药液流量控制的精度。[/size][size=16px] (2)制程工艺中对药液流量有不同的要求,所以电子针阀需具有不同口径和流量范围。[/size][size=16px] (3)电动针阀要求具有极快的响应速度,能实现快速的打开和闭合,以减少初段流量稳定时间和末端流量控制时的“水锤效应”影响。[/size][size=16px] (4)在清洗过程中所采用的化学药液,往往具有很强的腐蚀性。尽管管路和阀门所采用的不锈钢材料具有很好的抗腐蚀性,但各种阀门密封件往往抗腐蚀性很差,所以要求电动针阀的接液密封件也需要具有很强的耐腐蚀性。[/size][size=16px] 药液流量控制中上述对调节阀的要求,都是目前半导体清洗设备中需要解决的问题。为此,本文提出了相应的解决方案,解决方案的核心是采用具有系列口径的高速和耐腐蚀的电动针阀。[/size][size=18px][color=#339999][b]2. 解决方案[/b][/color][/size][size=16px] 为了满足上述湿法清洗工艺化学药液流量控制对调节阀的需要,本文提出的解决方案是采用具有一系列不同口径、高速和耐腐蚀的电动针阀。系列电动针阀如图2所示。[/size][align=center][size=16px][color=#339999][b][img=02.强耐腐蚀性的高速电动针阀,450,385]https://ng1.17img.cn/bbsfiles/images/2023/04/202304261139215269_3851_3221506_3.png!w599x513.jpg[/img][/b][/color][/size][/align][align=center][size=16px][color=#339999][b]图2 NCNV系列耐腐蚀高速电动针阀[/b][/color][/size][/align][size=16px] 用于流量调节的NCNV系列数控电动针阀将步进电机的精度和可重复性优势与针阀的线性和分辨率相结合,其结果是具有1s以内的开闭合时间,小于2%滞后、2%线性、1%重复性和0.2%分辨率的可调流量控制,是目前常用电磁比例阀的升级产品。电动针阀直接用模拟电压信号控制,与PID控制器和流量计相结合,可构成快速准确的闭环控制系统。[/size][size=16px] NCNV系列数控电动针阀的其他技术特点如下:[/size][size=16px] (1)多规格节流面积:具有从低流量的直径0.9mm到高流量的直径4.10mm的多种规格针阀节流面积,可满足不同的流量控制需要。[/size][size=16px] (2)宽压力范围:入口环境可覆盖宽泛的压力范围(5或7bar)。步进电机的刚度和功率确保针阀在相同的输入指令下打开,与压力无关。[/size][size=16px] (3)快速响应:整个行程时间小于1秒,可提供及时快速的流量调节和控制。[/size][size=16px] (4)耐腐蚀性:阀体采用不锈钢,密封件采用FFKM全氟醚橡胶,超强的耐腐蚀性,可用于各种腐蚀性气体和液体。[/size][size=16px] (5)电源电压为24V,控制信号为0~10V模拟电压,也可采用RS485直接控制。[/size][b][size=18px][color=#339999]3. 总结[/color][/size][/b][size=16px] 综上所述,通过采用上述系列的电动针阀,可以很好的实现湿法清洗中化学药液流量的精密调节。特别是与相应的流量计、压力传感器和具有串级和比值控制功能的高精度PID控制器相结合组成闭环控制系统,可实现各种药液配比流量的高精度控制。[/size][size=16px][/size][align=center][b][color=#339999]~~~~~~~~~~~~~~~~~~~[/color][/b][/align][align=center][/align][align=center][b][color=#339999][/color][/b][/align]
IT6720数控直流电源具有同类产品最宽广的电压电流使用率,大大提高了应用范围。100W的功率,输出值在60V/5A内可调,自动控制电压和电流的变化率,功率比达到三倍之多。一台机器可替代以往60V×1.6A/32V×3A/20V×5A三种机型,减少您的重复投资,大幅度节约成本。型号IT6720 60V/5A/100W属性 完全数字控制高分辨率10mV/1mA定电压及定电流输出低纹波低噪音超高亮度LED显示体积超小高可靠度:过电压/过电流/过热保护功能输出有开关控制可预设多组输出电压及电流:4×100组专业提供ITECH电源和负载,有需要的朋友可以联系我,电话:0512-67137557.

[color=#990000]摘要:目前真空冷冻干燥过程中已普遍使用了电容压力计,使得与电容压力计相配套的压力控制器和电动进气调节阀这两个影响压力控制精度和重复性的主要环节显着尤为突出。为解决控制精度问题,本文介绍了国产最新型的2通道24位高精度PID压力控制器和步进电机驱动电动针阀的功能、技术指标及其应用。经试验验证,上游控制模式中使用电动针阀和高精度控制器可将压力精确控制在±1%以内,并且此控制器还可以同时用于冷冻干燥过程中皮拉尼真空计的监控,以进行初次冻干终点的自动判断。[/color][size=18px][color=#990000]一、问题的提出[/color][/size] 压力控制是真空冻干过程中的一个重要工艺过程,其控制精度严重影响产品质量,对于一些敏感产品的冷冻干燥尤为重要。因此,为使冷冻干燥过程可靠且可重复地进行,必须在干燥室内准确、重复地测量和控制压力,这是考察冷冻干燥硬件设备能力的重要指标之一。同时因为一次干燥时的压力或真空度,直接影响产品升华界面温度,因此准确平稳的控制压力,对于一次干燥过程至关重要。但在实际真空冷冻干燥过程中,在准确压力控制方面目前国内还存在以下问题: (1)压力控制器不匹配问题:尽管冷冻干燥工艺和设备都配备了精度较高的电容压力计,其精度可达到满量程的0.2%~0.5%,但目前国内大多配套采用PLC进行电容压力计直流电压信号的测量和控制,PLC的A/D和D/A转换精度明显不够,严重影响压力测量和控制精度。A/D和D/A转换精度至少要达到16位才能满足冷冻干燥过程的需要。 (2)进气控制阀不匹配问题:对于冷冻干燥中的真空压力控制,其压力恒定基本都在几帕量级,因此一般都采用上游进气控制模式,即在真空泵抽速一定的情况下,通过电动调节阀增加进气流量以降低压力,减少进气流量以增加压力。但目前国内普遍还在使用磁滞很大的电磁阀来进行调节,严重影响压力控制精度和重复性,而目前国际上很多已经开始使用步进电机驱动的低磁滞电动调节阀。 为解决上述冷冻干燥过程中压力控制存在的问题,本文将介绍国产最新型的2通道24位高精度PID压力控制器、电动针阀的功能、技术指标及其应用。经试验考核和具体应用的验证,上游控制模式中使用电动针阀和高精度PID压力控制器可将压力精确控制在±1%以内,并且2通道PID控制器还可以同时用于冷冻干燥过程中皮拉尼真空计的监控和记录。[size=18px][color=#990000]二、国产2通道24位高精度PID压力控制器[/color][/size] 为充分利用电容压力计的测量精度,控制器的数据采集和控制至少需要16位以上的模数和数模转化器。目前我们已经开发出VPC-2021系列高精度24位通用性PID控制器,如图1所示。此系列PID控制器功能强大远超国外产品,但价格只有国外产品的八分之一。[align=center][img=冷冻干燥压力控制,550,286]https://ng1.17img.cn/bbsfiles/images/2021/12/202112211608584555_3735_3384_3.png!w650x338.jpg[/img][/align][align=center][color=#990000]图1 国产VPC-2021系列温度/压力控制器[/color][/align] 压力控制器其主要性能指标如下: (1)精度:24位A/D,16位D/A。 (2)多通道:独立1通道或2通道。2通道可实现双传感器同时测量及控制。 (3)多种输出参数:47种(热电偶、热电阻、直流电压)输入信号,可实现不同参量的同时测试、显示和控制。 (4)多功能:正向、反向、正反双向控制。 (5)PID程序控制:改进型PID算法,支持PV微分和微分先行控制。可存储20组分组PID,支持20条程序曲线(每条50段)。 (6)通讯:两线制RS485,标准MODBUSRTU 通讯协议。 在冷冻干燥的初级冻干终点判断中,VPC-2021系列中的2通道控制器可同时接入电容压力计和皮拉尼压力计,其中电容压力计用作真空压力控制,皮拉尼计用来监视冻干过程中水汽的变化,当两个真空计的差值消失时则认为初级冻干过程结束。整个过程的典型变化曲线如图2所示。[align=center][color=#990000][img=冷冻干燥压力控制,586,392]https://ng1.17img.cn/bbsfiles/images/2021/12/202112211609304857_1459_3384_3.png!w586x392.jpg[/img][/color][/align][align=center][color=#990000]图2. 初级干燥过程中的典型电容压力计和皮拉尼压力计的测量曲线[/color][/align][size=18px][color=#990000]三、国产步进电机驱动电子针阀[/color][/size] 为实现进气阀的高精度调节,我们在针阀基础上采用数控步进电机开发了一系列不同流量的电子针阀,其磁滞远小于电磁阀,如图3所示,价格只有国外产品的三分之一,详细技术指标如图4所示。[align=center][img=冷冻干燥压力控制,400,342]https://ng1.17img.cn/bbsfiles/images/2021/12/202112211609435684_1917_3384_3.png!w599x513.jpg[/img][/align][align=center][color=#990000]图3 国产NCNV系列电子针阀[/color][/align][align=center][color=#990000][img=冷冻干燥压力控制,690,452]https://ng1.17img.cn/bbsfiles/images/2021/12/202112211610002292_1250_3384_3.png!w690x452.jpg[/img][/color][/align][align=center][color=#990000]图4 国产NCNV系列电子针阀技术指标[/color][/align][size=18px][color=#990000]四、国产PID控制器和电子针阀考核试验[/color][/size] 考核试验采用了1Torr量程的电容压力计,电子针阀作为进气阀以上游模式进行控制试验。首先开启真空泵后使其全速抽气,然后在68Pa左右对PID控制器进行 PID参数自整定。自整定完成后,分别对12、27、40、53、67、80、93和 107Pa 共 8 个设定点进行了控制,整个控制过程中真空度的变化如图 5所示。 [align=center][color=#990000][img=冷冻干燥压力控制,690,418]https://ng1.17img.cn/bbsfiles/images/2021/12/202112211610175473_9598_3384_3.png!w690x418.jpg[/img][/color][/align][align=center][color=#990000]图5 多点压力控制考核试验曲线[/color][/align] 将图5曲线的控制效果以波动率来表达,则得到如图6所示的不同真空压力下的波动率。从图6可以看出,整个压力范围内只有在12Pa控制时波动率大于1%,显然将68Pa下自整定得到的PID参数应用于12Pa压力控制并不太合适,还需要进行单独的PID 参数自整定。[align=center][color=#990000][img=冷冻干燥压力控制,690,388]https://ng1.17img.cn/bbsfiles/images/2021/12/202112211610294377_3818_3384_3.png!w690x388.jpg[/img][/color][/align][align=center][color=#990000]图6. 多点压力恒定控制波动率[/color][/align][align=center][/align][align=center]~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~[/align]

[color=#ff0000]摘要:针对目前两种典型低温超导测试系统中存在的液氦压力控制精度较差的问题,本文提出了相应的解决方案。解决方案分别采用了直接压力控制和流量控制两种技术手段和配套数控阀门,结合24位AD和16位DA的超高精度的PID真空压力控制器和压力传感器,大幅提高了液氦压力控制精度,最终实现低温超导性能的高精度测试。[/color][color=#ff0000][/color][color=#ff0000][/color][align=center][img=低温超导测试系统中实现高精度液氦温度控制的解决方案,690,411]https://ng1.17img.cn/bbsfiles/images/2023/01/202301031120120633_4214_3221506_3.jpg!w690x411.jpg[/img][/align][align=center]~~~~~~~~~~~~~[/align][size=14px][/size][size=18px][color=#ff0000][b]1. 项目概述[/b][/color][/size] 各种超导部件如超导磁铁和超导腔体在装机前都需要在低温超导测试系统中对其性能进行测试,为了使超导部件达到低温环境则需要将被测部件浸泡在液氦介质内,并采用低温杜瓦盛装液氦介质。在整个测试过程中,对低温测试系统内的液氦压力要求极高,即要求杜瓦顶部氦气压强(绝对压力)有极好的稳定性,否则会导致测试不稳定,给测试结果带来严重误差。 目前国内现有的很多低温超导测试系统都存在液氦压力控制不稳定的严重问题,有些客户提出了相应的技术升级改造要求。 如图1所示的低温超导测试系统中,采用了两个不同口径的第一和第二泄压阀来粗调和细调液氦压力,但这种调节方法的液氦压力只能控制在1.2~1.6Bar范围内,对应4.39~4.74℃范围的液氦温度变化,造成0.35℃的温度波动。目前客户提出要设法将温度波动控制在0.1℃以内或更高的稳定性上,以提高超导部件性能测试精度。[align=center][color=#ff0000][b][img=超导试件测试时氦压控制系统,500,356]https://ng1.17img.cn/bbsfiles/images/2023/01/202301031123466941_8802_3221506_3.jpg!w690x492.jpg[/img][/b][/color][/align][align=center][color=#ff0000][b]图1 低温超导测试系统液氦压力控制装置[/b][/color][/align] 如图2所示的高场超导磁体低温垂直测试系统,其压力控制范围1~1.3Bar,尽管在图2所示系统中采用了液氦加热器来改变液氦压力,但由于压力控制阀的调节精密度不够,最终造成压力控制精度远达不到测试要求,客户也提出了技术改造要求。[align=center][b][color=#ff0000][img=高场超导磁体低温垂直测试系统,400,557]https://ng1.17img.cn/bbsfiles/images/2023/01/202301031123146762_3661_3221506_3.jpg!w522x728.jpg[/img][/color][/b][/align][align=center][b][color=#ff0000]图2 高场超导磁体低温垂直测试系统[/color][/b][/align] 针对上述两种典型低温超导测试系统中存在的液氦压力控制精度不足的问题,本文将提出相应的解决方案。解决方案将分别采用直接压力控制和流量控制两种技术手段和配套数控阀门,结合超高精度的PID真空压力控制器和压力传感器,可大幅度提高液氦压力控制精度,最终减小低温超导性能测试误差。[b][size=18px][color=#ff0000]2. 解决方案[/color][/size][/b] 在图1和图2所示的两种典型低温超导测试系统中,它们各自的液氦压力变化起因不同,因此要实现液氦压力准确控制的技术手段也不同。以下是解决方案中对应的两种不同技术途径。[b][color=#ff0000](1)直接压力调节法[/color][/b] 在图1所示的低温超导测试系统中,造成液氦蒸发的因素并不可控,只能通过调节液氦上方的氦气压力来使得测试系统保持稳定。因此,为了实现液氦上方的压强控制,解决方案采用了直接压力调节法,如图3所示,即采用数控压力控制阀代替图1中的第一和第二泄压阀。此压力控制阀与高精度PID控制器和压力传感器构成闭环控制回路,实现自动泄压和高精度压力控制。[align=center][color=#ff0000][b][img=纯压力控制结构,500,350]https://ng1.17img.cn/bbsfiles/images/2023/01/202301031124390427_8017_3221506_3.jpg!w690x483.jpg[/img][/b][/color][/align][align=center][color=#ff0000][b]图3 直接压力调节法控制装置结构[/b][/color][/align] 数控压力控制阀是一种数控正压减压控制阀,正好可以满足低温超导测试系统的微正压控制需求。通过氦气源和减压阀提供的驱动压力,可在控制阀出口处实现高精度的压力控制,同时还保持很小的漏气以节省氦气。 另外,此数控压力控制阀具有很高的控制精度,结合高精度的压力传感器和PID真空压力控制器,可将液氦压力控制在0.1%的高精度水平。[b][color=#ff0000](2)流量调节法[/color][/b] 在图2所示的低温超低测试系统中,其不同之处之一是具有液氦加热器,即通过液氦加热器和压力控制阀构成的控制回路可进行不同液氦压力的控制,由此实现不同液氦温度的控制。 为实现不同液氦压力的精密控制,解决方案在此采用了流量调节法。如图4所示,解决方案采用了电动针阀作为图2中的压力控制阀,电动针阀与双通道高精度PID控制器、压力传感器和液氦加热器构成闭环控制回路,可以按照任意设定值进行高精度的压力控制。[align=center][color=#ff0000][b][img=流量控制结构,500,290]https://ng1.17img.cn/bbsfiles/images/2023/01/202301031125069440_4211_3221506_3.jpg!w690x401.jpg[/img][/b][/color][/align][align=center][color=#ff0000][b]图4 流量调节法控制装置结构[/b][/color][/align] 电动针阀是一种数控的微小流量调节阀,可通过PID压力控制器自动调节针阀开度,流出的氦气可通向氦气回收气囊。电动针阀同样具有很高的控制精度,结合高精度的压力传感器和PID真空压力控制器,同样可将液氦压力控制在0.1%的高精度水平。[b][size=18px][color=#ff0000]3. 总结[/color][/size][/b] 通过上述解决方案的技术手段,可实现低温超低测试系统中液氦压力的准确控制,控制精度最高可达±0.1%。 按照绝对压力进行计算,饱和蒸气压为1.2Bar时,液氦温度为4.4K。由此,如果压力控制精度为±0.1%,液氦压力的波动范围为±1.2mBar(相当于绝对压力±120Pa),对应的液氦温度波动范围为4.4mK,即所控的液氦温度为4.4±0.0044K。 由此可见,通过本文所述的解决方案,仅通过采用工业级别较低造价的PID真空压力控制器和压力传感器,结合数控压力控制阀和电动针阀,就可实现很高精度的液氦压力控制,温度控制精度可达到mK量级,完全能满足绝大多数低温超导测试系统的需要。[align=center]~~~~~~~~~~~~~~~~~[/align]







 我要推广仪器
我要推广仪器
 下载APP
下载APP