半导体系统专用高精度控制电源应用在国内半导体行业中,无锡冠亚的半导体系统专用高精度控制电源中每个配件都是很重要的,其中,关于水泵是比较重要,我们也需要对其有一定的认识。 半导体系统专用高精度控制电源是一类广泛应用于国内工业生产领域的专业制冷设备,在半导体系统专用高精度控制电源中,水泵的运行是否正常对于保证低温半导体系统专用高精度控制电源设备的正常运转是非常重要的,定期对低温半导体系统专用高精度控制电源的水泵进行检测是非常关键的,那么,怎样合理的评估和检测低温半导体系统专用高精度控制电源水泵的情况好呢? 半导体系统专用高精度控制电源水泵的情况在较大程度上影响着低温半导体系统专用高精度控制电源设备的整体运行。在半导体系统专用高精度控制电源工作的时候,水泵在运行中,应注意检查各个仪表工作是否正常、稳定,特别注意电流表是否超过电动机额定电流,电流过大,过小应立即停机检查。 另外,半导体系统专用高精度控制电源设备的水泵相关工作系统能够较好的反映半导体系统专用高精度控制电源设备的工作状态。比如,水泵流量是否正常,检查出水管水流情况,根据水池水位变化,估计水泵运行时间,及时与调度联系。同时,还要检查水泵填料压板是否发热,滴水是否正常,每班不得少于八次。 半导体系统专用高精度控制电源的水泵性能是很关键的,需要我们认真对待,认真保养,只有每个配件的性能都可以的话,半导体系统专用高精度控制电源才能更好的使用。
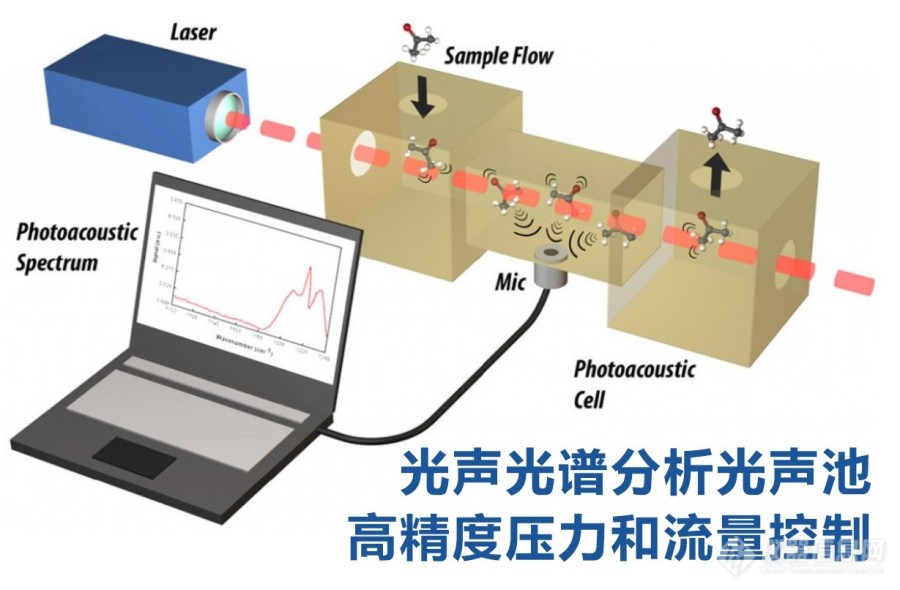
[align=center][size=16px][img=石英增强光声光谱和光热光谱技术中的高精密压力控制解决方案,600,393]https://ng1.17img.cn/bbsfiles/images/2023/11/202311130940541042_934_3221506_3.jpg!w690x452.jpg[/img][/size][/align][size=16px][color=#339999][b]摘要:光声池内气体压力的可调节控制以及稳定性是保证光声法高精度测量的关键,但在目前的光声和光谱研究中,对气体样品池内压力控制技术的报道极为简单,甚至很多都是错误的,根本无法实现高精度调节和控制,为此本文提出了可工程化实现的解决方案。基于动态平衡法控制介绍,解决方案采用了高精度真空计、气体流量计、电动针阀和双通道真空压力控制器等,可实现气体样品池的进气流量和真空压力的自动精密控制,并适用于多种气体。[/b][/color][/size][align=center][size=16px][color=#339999][b]===================[/b][/color][/size][/align][size=18px][color=#339999][b]1. 问题的提出[/b][/color][/size][size=16px] 光声法是基于光声效应的一种光谱技术,气体分子吸收特定波长的调制光辐射能量,由振动基态跃迁到激发态,然后通过快速的辐射跃迁或者无辐射跃迁过程回到基态。 气体分子通过无辐射跃迁过程回到基态会产生热能,导致气体温度的变化,相应地引起气体压强的变化,从而产生声波信号,信号的强弱与入射光强和气体吸收大小成正比,检测声音信号即可间接测定气体浓度。在光声法中气体既是被检气体,又是吸收光辐射的探测器,利用同一光声池检测装置,只要改变光源的波长即可对多种气体进行检测。[/size][size=16px] 随着技术的发展出现了许多新型光声光谱检测技术,但光声池始终是所有光声光谱检测仪器中的核心部件,注入光声池内的被检气体压力是影响光声法测量精度的关键因素之一,主要体现在以下两个方面:[/size][size=16px] (1)气体压力的稳定性对测量精度的影响[1,2]。[/size][size=16px] (2)不同气体和浓度的光声法测量过程中,在一个最佳气体压力下时测量精度最高[3]。[/size][size=16px] 由此可见,光声池内气体压力的可调节控制以及稳定性是保证光声法高精度测量的关键,而在光声池压力控制的所有文献报道中,有些仅简单描述了压力控制基本原理,有些所描述的压力控制方法和装置根本无法实现高精度调节和控制。[/size][size=16px] 如文献[3]采用石英增强光声和光热光谱技术测量痕量一氧化碳气体含量的报道中,仅介绍了光声池进样气体方式和压力控制的原理,整个装置和压力控制结构的简单描述如图1所示,图中所示的光声池压力控制尽管包括了真空泵、针阀、压力传感器和压力控制系统(PCS),但压力控制系统的布置位置并不一定正确,既没有明确具体技术细节,也没有显示出压力控制的自动化能力和控制精度能达到什么水平。同样,许多多其他光声法测试技术的研究报道也多是如此简单介绍,并未看到光声池压力控制的详细文献报道。[/size][align=center][size=16px][color=#339999][b][img=文献[3]光声和光热谱检测系统结构示意图,600,527]https://ng1.17img.cn/bbsfiles/images/2023/11/202311130942538680_3779_3221506_3.jpg!w690x607.jpg[/img][/b][/color][/size][/align][align=center][size=16px][color=#339999][b]图1 文献[3]光声和光热谱检测系统结构示意图[/b][/color][/size][/align][size=16px] 在河北大学的发明专利CN111595786B“基于光声效应的气体检测系统及方法”中提出了一种详细的光声池内部压力控制方法[4],其结构如图2所示。[/size][align=center][size=16px][color=#339999][b][img=文献[4]基于光声效应检测系统的结构示意图,690,447]https://ng1.17img.cn/bbsfiles/images/2023/11/202311130943224524_1783_3221506_3.jpg!w690x447.jpg[/img][/b][/color][/size][/align][align=center][size=16px][color=#339999][b]图2 专利[4]基于光声效应检测系统的结构示意图[/b][/color][/size][/align][size=16px] 在图2所示的光声池压力控制系统中,光声池上设有供气体进入的进气口,进气口通过导管与?30℃的冷肼预浓缩装置相连通,可以去除待测气体中水分的干扰,达到一定的浓缩效果。在光声池上还设有供气体排出的出气口、控制腔体内气压的压力监测口以及压力控制口。在进气口、出气口和压力控制口处均设有单向阀,在出气口和压力控制口处均设有真空泵。在压力监测口设有气体压力传感器,气体压力传感器连接单片机,单片机控制继电器以及一个抽气系统,当腔体内的气压未达到所设置的目标值时,压力传感器传出电信号到控制系统中的单片机来控制继电器闭合,使电机转动,抽气系统运行,保持腔内部的气压值为设定好的目标值,当腔内的气压达到设定目标值时该抽气系统不工作。[/size][size=16px] 由此可见,尽管专利[4]中采用了单片机进行压力的自动控制,但所描述的抽气系统控制是一种最简单的开关式控制方式,这种控制方式在控制精度的稳定性很差,往往会使光声池内的实际压力在设定值上下出现较大波动现象。[/size][size=16px] 另外,这种开关模式在控制过程中存在很大的滞后性,当传感器测量到压力值大于或小于设定值时才发出关闭或启动抽气电机信号,这势必带来控制延迟。而且对于小容积内的气压控制,目前已很少采用调节真空泵转速或开关式真空泵技术,这是因为会很容易影响真空泵寿命。[/size][size=16px] 为了彻底解决光声光谱和光热光谱技术中气体样品池的压力精密控制问题,基于真空压力控制的动态平衡法,即通过自动调节气体样品池的进气和排气流量,使它们能快速达到动态平衡状态,本文将提出以下详细且可工程化实现的解决方案。[/size][size=18px][color=#339999][b]2. 解决方案[/b][/color][/size][size=16px] 从研究文献所报道的光声光热法气体池内压力控制中,可以得出以下几项技术指标要求:[/size][size=16px] (1)气体池有一进气口和排气后,其中排气口连接真空泵,真空泵提供负压使样品气体通过进气口流入样品池,样品池的这种结构和气体取样方式则说明样品池内的压力一般应该是一个大气压上下的微负压或微正压,即样品池内的气体压力在500~1000Torr的绝对压力范围内,且要小于进气口压力。[/size][size=16px] (2)在文献[3]中报道了对最佳压力的测试研究,得到的最佳压力为600Torr。由此可见,针对不同气体的光声和光热法测试中,需要根据不同气体样品池的结构和具体被测气体寻找到最佳压力值,由此可保证最佳的测试精度。[/size][size=16px] (3)在文献[2,3]中,涉及到了多种气体混合和进气流量的控制,由此可说明在某些光声和光热法测试中需要具备对进气流量的调节,这也就是说,对于气体样品池而言,既要能调节进气流量,还要能调节气体压力且稳定控制。[/size][size=16px] 针对光声光谱和光热光谱技术中气体样品池的压力精密控制问题,特别是实现上述技术指标和功能,本解决方案所设计的气体样品池压力和进气流量控制系统结构如图3所示。[/size][align=center][size=16px][color=#339999][b][img=光声池气体压力和流量控制系统结构图,690,314]https://ng1.17img.cn/bbsfiles/images/2023/11/202311130943461767_8516_3221506_3.jpg!w690x314.jpg[/img][/b][/color][/size][/align][align=center][size=16px][color=#339999][b]图3 光声池气体压力和进气流量控制系统结构示意图[/b][/color][/size][/align][size=16px] 如图3所示,整个控制系统主要包含以下几方面的内容:[/size][size=16px] (1)压力控制模式:由于光声池内的压力需要在500~1000Torr的绝对压力范围进行调节和控制,因此解决方案中采用了动态平衡法中的下游控制模式,即恒定进气流量,通过调节排气流量的大小以达到不同的动态平衡,由此来实现不同气体压力的精密控制。进气形式如图3所示可以是单独一种气体,也可以是多种气体混合,各种气体可以通过气体质量流量控制器(MFC)进行流量的精密控制,各路气体进入一个混气罐进行混合后,再注入光声池内。气体的注入则通过排气端真空泵所提供的负压与进气端正压所形成的压力差来实现。[/size][size=16px] (2)压力控制回路:如图3中的蓝色箭头线所示,压力控制回路由1000Torr量程的电容真空计、NCNV-20型电动针阀和VPC2021-2型压力流量控制器组成,其中真空计检测光声池的真空压力并传输给控制器,控制器将传感器数据与压力设定值比较并经过PID计算,输出控制信号给排气电动针阀,实现压力自动恒定控制。[/size][size=16px] (3)流量控制回路:如图3中的红色箭头线所示,流量控制回路由气体流量计、NCNV-120电动针阀和VPC2021-2型压力流量控制器组成,其中控制器通过手动控制方式直接输出控制信号来调节进气电动针阀的开度,使得流量计达到希望值,由此可始终恒定进气流量保持不变。[/size][size=16px] 由此可见,通过图3所示的解决方案控制系统可实现光声池压力和进气流量的独立调节和控制,这种实现的关键部件是电控针阀和双通道压力流量控制器,电控针阀可以快速精密的调节进气和排气流量,而双通道压力流量控制器可直接连接真空计和流量计,实现高精度的真空压力和流量的测量,控制精度能小于读数的±1%,同时还能进行自动PID控制和手动恒定输出控制。[/size][size=18px][color=#339999][b]3. 总结[/b][/color][/size][size=16px] 综上所述,本解决方案对现有文献所报道的光声池压力控制方法进行了细化,比较而言,本文所提出的解决方案具有以下优势和特点:[/size][size=16px] (1)本解决方案更具有实用性,并经过了试验考核,按照解决方案可很快的搭建起光声池压力控制系统。[/size][size=16px] (2)本解决方案具有很强的适用性和可拓展性,如通过改变其中的相关部件参数指标就可适用于不同范围的真空压力,可满足光声法和光热法中对样品池气体压力的各种控制要求。[/size][size=16px] (3)本解决方案可以通过高压气源的改变来实现不同样品气体的测量,也可进行多种气体混合后的测试,具有很大的灵活性。[/size][size=16px] (4)解决方案中的真空压力控制自带计算机软件,可直接通过计算机的软件界面操作进行整个控制系统的调试和运行,且控制过程中的各种过程参数变化曲线自动存储,这样就无需再进行任何的控制软件编写即可很快搭建起控制系统,极大方便了光谱设备的搭建和测试研究。[/size][size=18px][color=#339999][b]4. 参考文献[/b][/color][/size][size=16px][1] 陈伟根,刘冰洁,胡金星,等.微弱气体光声光谱监测光声信号影响因素分析[J].重庆大学学报:自然科学版, 2011(2):7-13.[/size][size=16px][2] 张佳薇,谈志强,李明宝,等.气体流量对石英增强型光声光谱检测精度的影响[J].科学技术与工程, 2022(003):022.[/size][size=16px][3] Pinto D , Moser H , Waclawek J P ,et al.Parts-per-billion detection of carbon monoxide: A comparison between quartz-enhanced photoacoustic and photothermal spectroscopy[J].Photoacoustics, 2021, 22:100244.DOI:10.1016/j.pacs.2021.100244.[/size][size=16px][4] 娄存广,刘秀玲,王鑫,等.基于光声效应的气体检测系统及方法:CN202010511763.8[P]. CN111595786B[2023-11-10].[/size][size=16px][/size][size=16px][color=#339999][b][/b][/color][/size][align=center][size=16px][color=#339999][b]~~~~~~~~~~~~~~~[/b][/color][/size][/align]
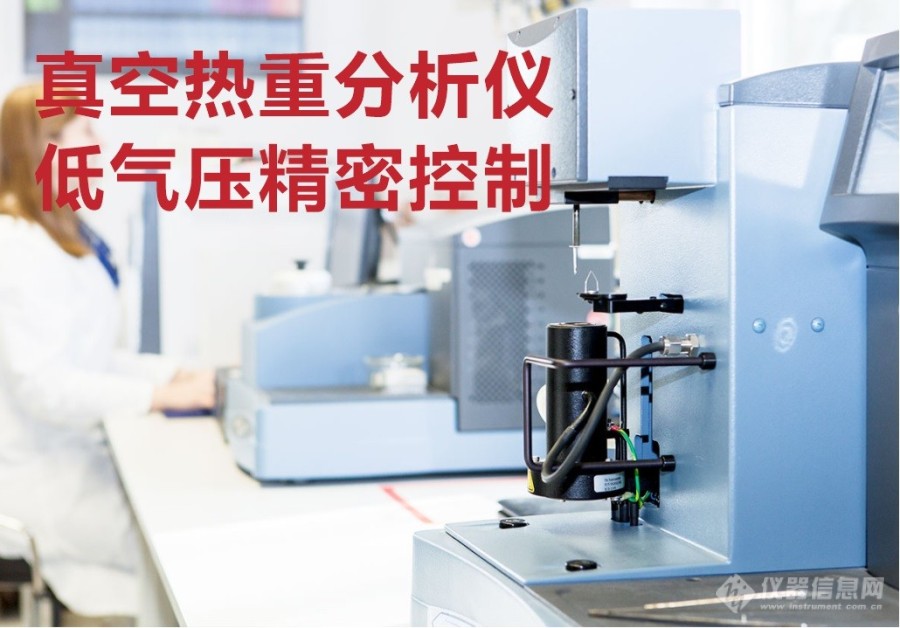
[align=center][size=16px] [img=真空热重分析仪多种气体低气压高精度控制解决方案,550,383]https://ng1.17img.cn/bbsfiles/images/2023/11/202311170921522574_4489_3221506_3.jpg!w690x481.jpg[/img][/size][/align][size=16px][color=#339999][b]摘要:针对目前国内外各种真空热重分析仪普遍不具备低压压力精密控制能力,无法进行不同真空气氛环境下材料热重分析的问题,并根据用户提出的热重分析仪真空度精密控制技术改造要求,本文提出了技术改造解决方案。解决方案基于动态平衡法采用了上游和下游控制方式,通过配备的多路进气混合装置、高精度电容真空计、电控针阀和双通道PID真空压力控制器,可实现热重分析仪在10Pa~100kPa范围内多种气体气氛下的真空度精密控制。[/b][/color][/size][align=center][size=16px][color=#339999][b]==========================[/b][/color][/size][/align][size=18px][color=#339999][b]1. 项目背景[/b][/color][/size][size=16px] 热重分析(Thermogravimetric Analysis,TG或TGA)是指在程序控制温度下测量待测样品的质量与温度变化关系的一种热分析技术,用来研究材料的热稳定性和组分。而真空热重分析(Vac-TGA)则是在普通热重分析中增加了真空变量,允许在低至1Pa的绝对压力条件下对样品进行分析,适用于在使用中需要减压条件的客户应用。真空热重分析技术用于解决在工作中遇到低气压的专业化检测分析,Vac-TGA还可以实现更准确地观察薄膜、复合材料、环氧树脂等材料的挥发物、降解和排气等情况。[/size][size=16px] 真空热重分析仪一般都配备真空密闭的炉体和精确控制保护气和吹扫气流量的气体质量流量控制器(MFC),为TG与FTIR或[url=https://insevent.instrument.com.cn/t/bp][color=#3333ff]GC-MS[/color][/url]等联用提供了便利。密闭系统的真空度最高可达1Pa(绝对压力),一般都包括两路吹扫气和一路保护气,由此可进行各种气氛环境下的热重分析,如惰性、氧化性、还原性、静态和动态气氛环境。[/size][size=16px] 目前常见的真空热重分析仪只能实现抽真空功能,普遍无法对密闭炉体内的气体压力进行准确控制,只有最先进的磁悬浮热重分析仪具有压力控制功能,但也仅适用于大于一个大气压的高压控制,其结构如图1所示,还是无法对低于一个大气压的低压环境进行调节控制,无法提供低压环境的模拟。[/size][align=center][size=16px][color=#339999][b][img=国外磁悬浮热重分析仪气体流量和压力控制系统结构示意图,450,464]https://ng1.17img.cn/bbsfiles/images/2023/11/202311170923427525_9766_3221506_3.jpg!w690x712.jpg[/img][/b][/color][/size][/align][align=center][size=16px][color=#339999][b]图1 国外磁悬浮热重分析仪气体流量和压力控制系统结构示意图[/b][/color][/size][/align][size=16px] 由于现有真空热重分析仪无法提供低压环境的真空控制,客户希望能对现有V-TGA进行技术改造,增加真空度控制功能,以对高原地区低氧、低气压条件下的煤燃烧过程开展研究。[/size][size=16px] 为了彻底真空热重分析仪的真空压力精密控制问题,基于真空压力控制的动态平衡法,即通过自动调节热重分析仪的进气和排气流量,使内部气压快速达到动态平衡状态而恒定在设定真空度上,为热重分析仪提供可任意设定低气压值的精密控制,本文将提出以下技术改造实施方案。[/size][size=18px][color=#339999][b]2. 解决方案[/b][/color][/size][size=16px] 首先,根据客户要求以及今后真空热重分析仪的低压应用,本解决方案拟达到的指标如下:[/size][size=16px] (1)真空度控制范围:10Pa~100kPa(绝对压力)。[/size][size=16px] (2)真空度控制精度:±1%(读数)。[/size][size=16px] (3)气氛:真空、单一气体和多种气体混合。[/size][size=16px] 为达到上述技术指标,解决方案设计的热重分析仪真空压力控制系统结构如图2所示。[/size][align=center][size=16px][color=#339999][b][img=真空热重分析仪低气压精密控制系统结构示意图,690,329]https://ng1.17img.cn/bbsfiles/images/2023/11/202311170924200752_5900_3221506_3.jpg!w690x329.jpg[/img][/b][/color][/size][/align][align=center][size=16px][color=#339999][b]图2 真空热重分析仪低气压精密控制系统结构示意图[/b][/color][/size][/align][size=16px] 如图2所示,为了实现10Pa~100kPa全量程内的真空度控制,控制系统的具体内容如下:[/size][size=16px] (1)配备了两只电容真空计,量程分别是10Torr和1000Torr,精度都为读数的±0.2%。[/size][size=16px] (2)采用了动态平衡法进行控制,其中在真空度10Pa~1kPa范围内采用上游(进气端)控制模式,而在1kPa~100kPa真空度范围内采用下游(排气端)控制模式。[/size][size=16px] (3)上游控制模式:上游控制模式是固定排气流量(真空泵全开,电动针阀2固定某一开度),通过自动调节电动针阀1开度来改变进气流量,使进气流量与排气流量达到动态平衡而实现某一真空度设定值的恒定控制。实施上游控制模式的闭环控制回路包括10Torr真空计1、电动针阀1和真空压力控制器的第一通道,如图2中的蓝色虚线所示。[/size][size=16px] (4)下游控制模式:下游控制模式是固定进气流量(电动针阀1固定某一开度),通过自动调节电动针阀2开度来改变排气流量,使进气流量与排气流量达到动态平衡而实现某一真空度设定值的恒定控制。实施下游控制模式的闭环控制回路包括1000Torr真空计2、电动针阀2和真空压力控制器的第二通道,如图2中的红色虚线所示。[/size][size=16px] (5)双通道真空压力控制器:所配备的VPC2021-2真空压力控制器具有两路独立的PID控制通道,与相应的真空计和电动针阀配合可组成上游和下游控制回路。在进行上游自动控制过程中,上游控制回路进行自动PID控制,而下游控制回路设置为手动控制并设定固定输出值以使得电控针阀2的开度固定。在进行下游自动控制过程中,下游控制回路进行自动PID控制,而上游控制回路设置为手动控制并设定固定输出值以使得电控针阀1的开度固定。[/size][size=16px] (6)电动针阀:所配备的NCNV系列电动针阀是一种步进电机驱动的高速针型阀,可在一秒时间内完成从关到开的高速线性变化,具有很好的线性度和重复性精度,具有极低的磁滞,可采用模拟信号(0-10V、4-20mA)和RS485进行控制,可对小流量气体流量进行精密调节。[/size][size=16px] (7)进气装置:图2所示的控制系统进气装置可实现多种气体的精密配比混合,每种气体的流量通过气体质量流量控制器进行调节和控制,多路气体在混气罐内进行混合,混合后的气体作为进入真空热重分析仪的进气。[/size][size=16px] (8)控制精度:由于整个控制系统采用了高精度的真空计、电动针阀和PID控制器,可实现全量程的真空度精密控制,考核试验结果证明控制可轻松达到±1%读数的高精度。[/size][size=16px] (9)控制软件:双通道真空压力控制器配备有计算机控制软件,通过控制器上的RS485通讯接口,计算机可远程操作真空压力控制器实现控制运行、参数设置和过程参数的采集、存储和曲线显示。[/size][b][size=18px][color=#339999]3. 总结[/color][/size][/b][size=16px] 本解决方案彻底解决了真空热重分析仪中存在的真空度精密控制问题,在满足用户所提的真空热重分析仪技术改造要求之外,本解决方案还具有以下优势和特点:[/size][size=16px] (1)本解决方案具有很强的实用性,并经过了试验考核和大量应用,按照解决方案可很快完成真空热重分析仪高精度真空压力控制系统的搭建和技术改造,无需对热重分析仪进行改动。[/size][size=16px] (2)本解决方案具有很强的适用性,通过改变其中的相关部件参数指标就可适用于不同范围和不同规格型号真空热重分析仪的真空压力控制,可满足各种真空热重分析仪的多种低气压控制需求。[/size][size=16px] (3)本解决方案可以通过增减高压气源来实现不同气体气氛环境的低压控制,也可进行多种气体混合后的低压控制,具有很大的灵活性。[/size][size=16px] (4)本解决方案还为后续的热重分析仪与其他热分析联用留有接口,如可以通过在排气端增加微小流量可变泄漏阀实现与质谱仪的联用。[/size][align=center][size=16px][color=#339999][b][/b][/color][/size][/align][align=center][b][color=#339999]~~~~~~~~~~~~~~~[/color][/b][/align][size=16px][/size]

CPR-001型高精度配气仪是微处理器控制的数字化配气系统,它适用于工厂、实验室、科研单位使用标准气体标定,校准气体分析仪器标气的样品制备,其精度远远高于其他同类型控制的配气系统。CPR-001型高精度配气仪可以单独操作,也可以与微机联用。该系统配有与微机通讯的并行口与串行口。CPR-001型高精度配气仪的配气比可在0~100%范围内连续可调。http://ng1.17img.cn/bbsfiles/images/2011/04/201104051430_287200_1638489_3.jpg
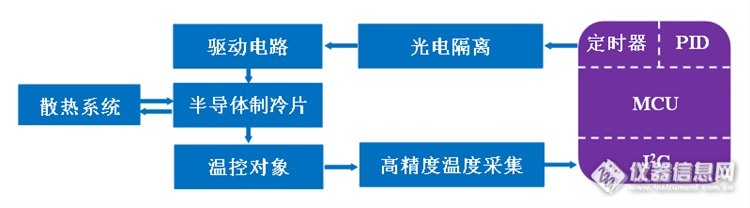
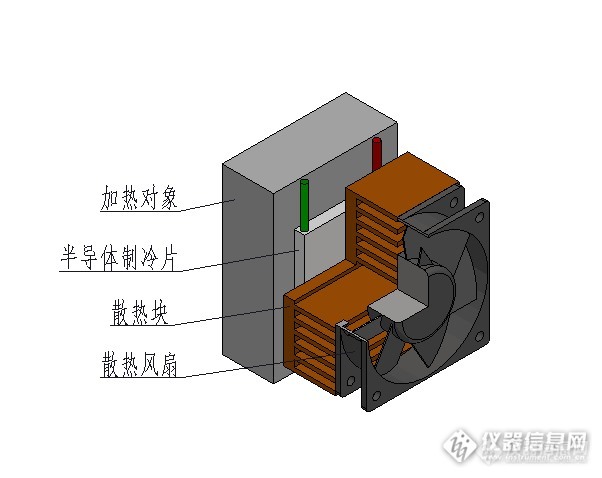
成果简介 半导体制冷片是利用特殊半导体材料构成的PN结产生Peltier效应制成,具有无噪声、体积小、结构简单、加热制冷切换方便、冷热转换具有可逆性等优点。化工安全组对基于半导体制冷片温控系统的影响因素进行了全面、系统分析和实验研究,设计完成了大功率、高可靠性的半导体制冷片驱动电路,并积累了半导体制冷片加热制冷切换双向温控算法的丰富经验,形成了半导体制冷片整套的研究方法和应用手段。目前,半导体制冷片的高精度温度控制系统已应用在产品中。系统组成http://ng1.17img.cn/bbsfiles/images/2016/07/201607121459_600117_3112929_3.jpg图1 基于半导体制冷片的温度控制单元结构http://ng1.17img.cn/bbsfiles/images/2016/07/201607121500_600118_3112929_3.png图2 高精度温度控制系统硬件组成技术指标(1)温度范围:0~120℃;(2)控温精度:±0.05℃;(3)半导体制冷片驱动电路能够最大支持20V 15A输出。http://ng1.17img.cn/bbsfiles/images/2016/07/201607121500_600119_3112929_3.jpg图3 0℃和120℃温度控制曲线图http://ng1.17img.cn/bbsfiles/images/2016/07/201607121500_600120_3112929_3.jpg图4 37.8℃温度控制过程曲线图 http://ng1.17img.cn/bbsfiles/images/2016/07/201607121500_600121_3112929_3.jpg图5 37.8℃稳态控制精度曲线图技术特点(1)高精度温度采集电路:创新性采用比率法和激励换向技术,系统温度分辨力达到0.001℃,检测精度达到±0.01℃。(2)大功率高可靠性的半导体制冷驱动:采用H桥电路形式实现半导体制冷片加热制冷方式的切换,解决了该类驱动电路无死区防护、功率小等问题;设计引入滤波和保护电路,大大增强了半导体制冷片的寿命及驱动电路的可靠性。(3)双向多模式温控:温控策略充分考虑半导体制冷片加热制冷输出功率差异、功率随温度变化以及系统加热制冷方式切换的随机性等因素,综合采用了单点与扫描结合、高低温分段处理、随环境温度变化动态调节等多重温控调节方式。获得研发资助情况浙江省公益项目前期应用示范情况已用于微量蒸气压测定仪产品中的温度控制,温度范围为0~120℃,控温精度为±0.05℃,驱动电路输出12V/10A。相关产品已通过批量试产,温控系统运行稳定可靠,可复制性强,实现成本低,适合于批量生产。转化应用前景半导体制冷片因加热制冷切换方便、结构简单、系统噪音小、控温精确度高以及成本低等优点,有望在科学仪器温度控制、温度发生和电气设备散热等领域获得广泛应用。特别是随着仪器仪表尤其是生命科学仪器、化学分析仪器等逐渐向高精度、小型化方向快速发展,高精度的小型温度控制系统需求越来越旺盛,因此半导体制冷片具有良好的应用前景。合作方式(1)技术转让;(2)委托开发;(3)双方联合开发。应用领域分析仪器、医疗仪器、生命科学测试仪器、家用电器等领域中高精度的恒温、匀速升降温等多模式的温度控制,以及电气装置散热等。联系人:杨遂军;联系电话:0571-86872415、0571-87676266;Email:yangsuijun1@sina.com;工贸所网址:http://itmt.cjlu.edu.cn;工贸所微信公众号:中国计量大学工贸所。中国计量大学工业与商贸计量技术研究所简介 中国计量大学是以“计量、测试、标准”为特色的院校,主要培养测试技术、仪器开发方向的专属人才。 中国计量大学工业与商贸计量技术研究所是学校为进一步推动高水平研究团队的建设而在2014年设立的两个学科特区之一,主要针对工业生产与贸易往来中关乎国计民生的计量测试问题,以新方法、技术、设备及评价为研究对象,主要研究方向为化工产品及工艺安全测试技术与仪器、零部件无损检测技术与设备、光栅信号处理与齿轮精密测量,涉及的单元技术有高精度温度检测技术、快速热电传感技术、高稳态温度场发生技术、低热惰性高压容器制备工艺、激光和电磁加热、非稳态传热反演、基于幅值分割原理的光栅信号数字细分、光栅信号短周期误差补偿、机器视觉高精度尺寸测量。研究所同时是化工产品安全测试技术及仪器浙江省工程实验室,先后承担国家重大科学仪器设备开发专项、国家公益性行业科研专项、国家自然基金、973等国家级项目,科研经费超千万。现有专职科研人员9人、工程技术人员2人、在读研究生30余人、行政与科研管理人员3人。 “应用驱动、产研融合”是研究所的标签,以应用驱动为前提,通过方法技术化、技术产品化、产品市场化,将科研成果落脚于实际应用,为经济与社会发展提供推动力,同时为研究所提供持续发展所需资金、影响力、信息等各类资源的支撑,目前研究所已拥有2家产业化公司。 更多研究所介绍请登录研究所网站itmt.cjlu.edu.cn或微信公众号。
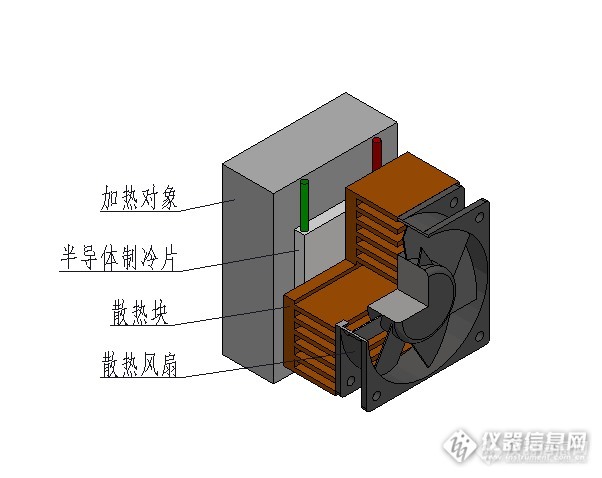
基于半导体制冷片的高精度温度控制系统成果简介半导体制冷片是利用特殊半导体材料构成的PN结产生Peltier效应制成,具有无噪声、体积小、结构简单、加热制冷切换方便、冷热转换具有可逆性等优点。化工安全组对基于半导体制冷片温控系统的影响因素进行了全面、系统分析和实验研究,设计完成了大功率、高可靠性的半导体制冷片驱动电路,并积累了半导体制冷片加热制冷切换双向温控算法的丰富经验,形成了半导体制冷片整套的研究方法和应用手段。目前,半导体制冷片的高精度温度控制系统已应用在产品中。系统组成http://ng1.17img.cn/bbsfiles/images/2016/05/201605302242_595303_3112929_3.png图1 基于半导体制冷片的温度控制单元结构http://ng1.17img.cn/bbsfiles/images/2016/05/201605302242_595304_3112929_3.jpg图2 高精度温度控制系统硬件组成技术指标(1)温度范围:0~120℃;(2)控温精度:±0.05℃;(3)半导体制冷片驱动电路能够最大支持20V 15A输出。http://ng1.17img.cn/bbsfiles/images/2016/05/201605302243_595305_3112929_3.jpg 图3 0℃和120℃温度控制曲线图http://ng1.17img.cn/bbsfiles/images/2016/05/201605302243_595306_3112929_3.jpg 图4 37.8℃温度控制过程曲线图 http://ng1.17img.cn/bbsfiles/images/2016/05/201605302243_595307_3112929_3.jpg 图5 37.8℃稳态控制精度曲线图技术特点(1)高精度温度采集电路:创新性采用比率法和激励换向技术,系统温度分辨力达到0.001℃,检测精度达到±0.01℃。(2)大功率高可靠性的半导体制冷驱动:采用H桥电路形式实现半导体制冷片加热制冷方式的切换,解决了该类驱动电路无死区防护、功率小等问题;设计引入滤波和保护电路,大大增强了半导体制冷片的寿命及驱动电路的可靠性。(3)双向多模式温控:温控策略充分考虑半导体制冷片加热制冷输出功率差异、功率随温度变化以及系统加热制冷方式切换的随机性等因素,综合采用了单点与扫描结合、高低温分段处理、随环境温度变化动态调节等多重温控调节方式。获得研发资助情况浙江省公益项目前期应用示范情况已用于微量蒸气压测定仪产品中的温度控制,温度范围为0~120℃,控温精度为±0.05℃,驱动电路输出12V/10A。相关产品已通过批量试产,温控系统运行稳定可靠,可复制性强,实现成本低,适合于批量生产。转化应用前景半导体制冷片因加热制冷切换方便、结构简单、系统噪音小、控温精确度高以及成本低等优点,有望在科学仪器温度控制、温度发生和电气设备散热等领域获得广泛应用。特别是随着仪器仪表尤其是生命科学仪器、化学分析仪器等逐渐向高精度、小型化方向快速发展,高精度的小型温度控制系统需求越来越旺盛,因此半导体制冷片具有良好的应用前景。合作方式(1)技术转让;(2)委托开发;(3)双方联合开发。应用领域分析仪器、医疗仪器、生命科学测试仪器、家用电器等领域中高精度的恒温、匀速升降温等多模式的温度控制,以及电气装置散热等。联系人:杨遂军;联系电话:0571- 86872415、0571-87676266;Email: yangsuijun1@sina.com。微信公众号:中国计量大学工贸所工贸所网站:itmt.cjlu.edu.cn中国计量大学工业与商贸计量技术研究所中国计量大学是以“计量、测试、标准”为特色的院校,主要培养测试技术、仪器开发方向的专属人才。中国计量大学工业与商贸计量技术研究所是学校为进一步推动高水平研究团队的建设而在2014年设立的两个学科特区之一,主要针对工业生产与贸易往来中关乎国计民生的计量测试问题,以新方法、技术、设备及评价为研究对象,主要研究方向为化工产品及工艺安全测试技术与仪器、零部件无损检测技术与设备、光栅信号处理与齿轮精密测量,涉及的单元技术有高精度温度检测技术、快速热电传感技术、高稳态温度场发生技术、低热惰性高压容器制备工艺、激光和电磁加热、非稳态传热反演、基于幅值分割原理的光栅信号数字细分、光栅信号短周期误差补偿、机器视觉高精度尺寸测量。研究所同时是化工产品安全测试技术及仪器浙江省工程实验室,先后承担国家重大科学仪器设备开发专项、国家公益性行业科研专项、国家自然基金、973等国家级项目,科研经费超千万。现有专职科研人员9人、工程技术人员2人、在读研究生30余人、行政与科研管理人员3人。“应用驱动、产研融合”是研究所的标签,以应用驱动为前提,通过方法技术化、技术产品化、产品市场化,将科研成果落脚于实际应用,为经济与社会发展提供推动力,同时为研究所提供持续发展所需资金、影响力、信息等各类资源的支撑,目前研究所已拥有2家产业化公司。
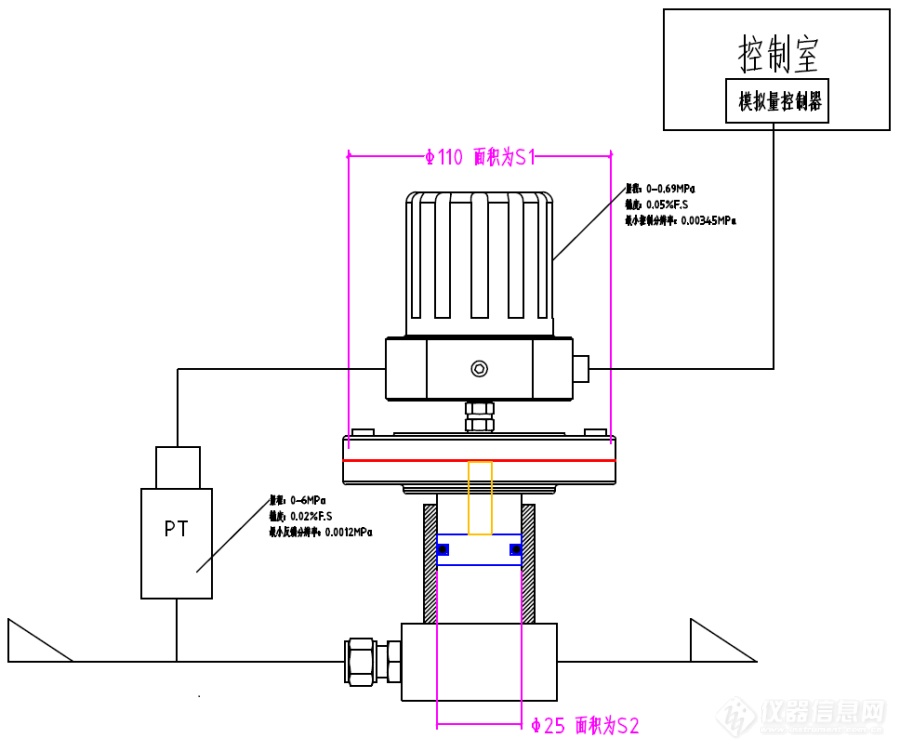
[size=14px][color=#ff0000]摘要:本文针对一个高精度气体压力程序控制工艺案例,分别对TESCOM ER5000及其配套背压阀和国产化产品的技术方案进行了计算分析。分析结果证明非标定制的国产化产品可以实现更高的测控精度,具有更便捷的操作性和更高的性价比。[/color][/size][align=center]~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~[/align][size=18px][color=#ff0000]一、案例简介[/color][/size][size=14px]在某一压力工艺过程中,工艺设备中配备了一个缓冲罐以保证工艺压力准确和稳定,要求缓冲罐的气体压力可程序控制,技术指标如下:[/size](1)缓冲罐容积:200~300升。[size=14px](2)缓冲罐功能:升压、保压和泄压。最大压力:3~5MPa。[/size](3)压力控制程序:升压3天,保压1周,泄压15天。[size=14px](4)控压精度:±(0.02~0.1)MPa,最好能达到±0.02MPa。[/size]因产品生产工艺对压力控制精度比较敏感,现有压力控制系统无法满足要求,生产工艺需采用更高精度的气体压力控制装置进行升级改造。本文将针对此高精度压力控制技术要求,分别对艾默生和上海依阳的压力控制装置进行了分析和对比,以期实现国产化替代。[size=18px][color=#ff0000]二、TESCOM压力控制装置分析[/color][/size]TESCOM压力控制装置的结构如图1所示,具体包含TESCOM的26-20调压器(最大出口压力5.5MPa)和ER5000Sl-1电子气控执行器。[align=center][size=14px][img=ER5000替代,690,575]https://ng1.17img.cn/bbsfiles/images/2022/05/202205310852254352_3211_3384_3.png!w690x575.jpg[/img][/size][/align][size=14px][/size][align=center]图1 艾默生TESCOM压力控制装置结构示意图[/align][size=14px]因先导感压面积 S1 × 执行器输出压力=高压感压面积 S2 × 高压阀输出压力+部件阻力。[/size]部件阻力(静止到运动的启动阻力)主要来自阀芯开闭合时弹簧下压的变形,部件的滑动摩擦暂且不计。因下游缓冲罐为密闭状态,因此每次压力整定好后,阀芯处于闭合状态。[size=14px]此阀芯(Tescom其他型号的也是同款阀芯)的静启动推力,约为0.5kg。[/size]可得:高压阀自身的步阶精度Δ(MPa)[size=14px]=(先导感压面积S1 × 气动执行器最小分辨压力K - 部件阻力N)/高压感压面积S2[/size]=(S1× K-N)/S2 =(94. 99cm^2 × 0.0345kg/cm^2-0 .5kg)/4.91cm^2[size=14px]=Δ0.056MPa. [/size][size=18px][color=#ff0000]三、依阳公司压力控制装置分析[/color][/size][size=14px]依阳公司压力控制装置的结构如图2所示,具体包含高精度调压器(最大出口压力6MPa)和高精度电子气控执行器。[/size][align=center][size=14px][img=ER5000替代,690,653]https://ng1.17img.cn/bbsfiles/images/2022/05/202205310853043434_7346_3384_3.png!w690x653.jpg[/img][/size][/align][size=14px][/size][align=center]图2 依阳公司压力控制装置结构示意图[/align][size=14px]同样先导感压面积S1×执行器输出压力=高压感压面积 S2 × 高压阀输出压力+部件阻力。[/size]同样部件阻力(静止到运动的启动阻力)主要来自阀芯开闭合时弹簧下压的变形,部件的滑动摩擦暂且不计。因下游缓冲罐为密闭状态,因此每次压力整定好后,阀芯处于闭合状态。可得:高压阀自身的步阶精度Δ(MPa)=(先导感压面积S1 × 气动执行器最小分辨压力K - 部件阻力N)/高压感压面积S2[size=14px]=(S1× K-N)/S2 [/size]=(254.3cm^2 × 0.0615kg/cm^2-0 .6kg)/38.47cm^2[size=14px]=Δ0.039MPa. [/size][size=18px][color=#ff0000]四、结论[/color][/size][size=14px]通过上述计算,对比分析可得出以下结论:[/size](1)气体压力的控制精度,与气动执行器精度和背压调压阀精度密切相关。[size=14px](2)每次做压力调整,因冷启动阻力K值依然存在,也是阀门整体高压输出分辨率的瓶颈根源。最终分辨率的瓶颈,不是传感器和执行器的精度。[/size](3)通过上述计算公式可知加大执行机构的受力面积,可以对抗冷启动的阻力,从而提高每次调整步价的分辨率。阀体定制化服务,可以将执行机构的受力面积无限扩大,从而让输出的压力分辨率趋近无限细分。[size=14px](4)TESCOM或市场上的其他批量化商用阀门,考虑的是满足大多数使用场合的精度,因此更侧重的是体积紧凑和材料的节约,综合其性价比,并不完全适用和满足高精度或者特殊工况的使用。[/size]通过上述分析结论,可以明显看出通过依阳公司定制的气体压力控制装置可以达到比国外产品更高的控制分辨率和控制精度,完全能满足高精度高压控制要求等特殊工况,可实现有效的国产化替代。[size=14px][/size][align=center]=======================================================================[/align] [size=14px][/size]
工作原理:将几乎无摩擦力的石墨活塞置于体积精确的测量池中。旁通阀开启以接受被测气流,关闭以测量流量。活塞从下部平稳移动到上部,然后迅速落下,从活塞的起落时间,计算流量。•主要特点:高精度---- ± 1% • 采用干式活塞原理,使用简单方便 • 流量精确控制,经过ISO17025认证 • 测量范围广 ---- 100倍跨度 • 结构紧凑 • 方便快速 • 宽大显示屏幕 • 每组读数可高达100个 • 可内置温度、压力传感器,优化测试结果(520系列)厂家说,当气体流为5-50000标况毫升|分钟时,仪器不确定读不可置信地低至读书的±0.071%

[align=center][img=通过超高精度真空控制提高分子蒸馏分离纯度的方法,550,392]https://ng1.17img.cn/bbsfiles/images/2022/11/202211040202188410_3231_3221506_3.jpg!w690x492.jpg[/img][/align][color=#990000]摘要:为了提升蒸馏纯度,针对现有分子蒸馏中气体流量计式真空度控制系统存在精度较差和响应速度慢的问题,本文提出了更高精度的真空度控制解决方案。解决方案采用更直接、精密和快速的电动针阀来代替现有的气体质量流量计,并同时使用精度更高的薄膜电容规和24位AD、16位DA控制器,可实现任意设定真空度下±0.5%的控制精度,同时对温度等因素所带来的真空度变化有极快的响应,可保证分子蒸馏过程中真空控制的高精度和稳定性。[/color][align=center][color=#990000]~~~~~~~~~~~~~~~~~~~~~~~~~[/color][/align][color=#990000][size=18px]一、问题的提出[/size][/color]分子蒸馏是一种特殊的液-液分离技术,它不同于传统蒸馏依靠沸点差分离原理,而是靠不同物质分子运动平均自由程的差别实现分离。当液体混合物沿加热板流动并被加热,轻、重分子会逸出液面而进入[url=https://insevent.instrument.com.cn/t/Mp][color=#3333ff]气相[/color][/url],由于轻、重分子的自由程不同,因此,不同物质的分子从液面逸出后移动距离不同,若能恰当地设置一块冷凝板,则轻分子达到冷凝板被冷凝排出,而重分子达不到冷凝板沿混合液排出,由此达到物质分离的目的。短程蒸馏器是一个工作在0.001~1mbar(0.1~100Pa)绝对压力下热分离技术过程,它较低的沸腾温度,非常适合热敏性和高沸点物。在分子蒸馏工艺中,真空度的控制精度决定了分离物质的纯度,目前绝大多数分子蒸馏设备中真空度控制系统普遍还都采用液环真空泵与旋片式真空泵结合气体流量计的技术,这种通过气体流量计调节进气流量的方法无法实现高精度的真空度稳定控制,具体是以下几方面原因:(1)分子蒸馏过程的真空度变化范围一般为0.1~100Pa,这种高真空范围对气体流量计的真空漏率有较高要求,一般气体流量计很难满足要求,必须使用专门用于高真空的气体流量计。(2)气体流量计的调节精细度普遍较粗,如果要实现高精密的气体流量调节,同样要使用高档更精密的气体流量计。(3)通常气体流量计的响应速度比较慢,很难实现在1秒之内完成全闭到全关的动作时间。(4)多数分子蒸馏中的真空传感器普遍采用精度较差的数字皮拉尼电阻规和电热偶规等。(5)绝大多数调节气体流量计的PID控制器精度较差,多为12位AD和DA转换器,极少用到16位的AD和DA转换器,PID控制器的精度是决定分子蒸馏真空度控制精度的关键。为了提升蒸馏纯度,针对上述现有分子蒸馏中气体流量计式真空度控制系统存在的问题,本文提出了更高精度真空度控制的解决方案。解决方案将采用更直接、精密和快速的电动针阀来代替现有的气体质量流量计,并同时使用精度更高的薄膜电容规和24位AD、16位DA控制器,由此可实现分子蒸馏工艺中任意设定真空度下±0.5%的控制精度,并对温度等因素所带来的真空度变化有极快的响应,有效保证分子蒸馏过程中真空度的高精度和高稳定性。[size=18px][color=#990000]二、解决方案[/color][/size]通过上述分析可以看出,限制现有短程分子蒸馏工艺真空度控制精度的主要因素分别是:(1)气体质量流量计调节精度和响应速度。(2)真空度传感器的测量精度。(3)PID控制器的测量和控制精度。为解决上述问题,本文提出的具体解决方案是采用相应的三个替换装置,如图1所示。[align=center][color=#990000][img=短程分子蒸馏高精度真空度控制装置,690,282]https://ng1.17img.cn/bbsfiles/images/2022/11/202211040201378335_1412_3221506_3.jpg!w690x282.jpg[/img][/color][/align][align=center][color=#990000]图1 短程分子蒸馏高精度真空度控制装置[/color][/align]如图1所示,为提高蒸馏纯度,实现高精度真空度控制,解决方案采用了以下三个装置:[color=#990000](1)采用高速电动针阀代替气体质量流量计[/color]分子蒸馏高真空度控制的基本原理是调节蒸馏器的进气流量和出气流量并达到一个动态平衡,所以这里的技术关键是如何实现进气流量的精密调节。尽管气体质量流量计可以进行进气流量调节,但采用的是电磁阀技术,有着较大的迟滞现象和较慢的响应速度,这些都会影响真空度的控制精度。解决方案中所采用的高速电动针阀是一种高速步进电机驱动的纯机械式针型阀,在大幅度减少迟滞误差的同时,还将整体响应时间缩短到了800微秒,同时精细步长可实现阀门的快速精密调节。驱动控制只需采用0-10V的模拟电压,整体结构简单且可靠性强。多个规格的电动针阀具有不同的气体流量调节能力,可满足不同容积的蒸馏器的真空度控制,同时还可以采用FFKM全氟醚橡胶密封提高耐腐蚀性。[color=#990000](2)采用薄膜电容规代替皮拉尼电阻规和电热偶规[/color]薄膜电容规的测量精度要远高于皮拉尼电阻规和热偶规,在任意真空度下其精度都可以达到±0.25%。那么对于短程蒸馏器0.001~1mbar(0.1~100Pa)的真空度量程内,可直接选择一只1Torr的薄膜电容规即可满足全量程的真空度测量,如果为了保证0.1~1Pa范围内的测量精度,还可以再补充一只0.1Torr的薄膜电容规。这样,通过两只不同量程的薄膜电容规可覆盖全真空度范围内的准确测量。[color=#990000](3)采用超过精度真空控制器代替普通精度PID控制器[/color]在任何PID反馈式闭环控制系统中,无论传感器和执行器精度多高,最终的控制精度都需要控制器的精度予以保证,为此,在解决方案中采用了超高精度的PID真空控制器。此超高精度PID真空度控制器具有24位AD和16位DA,采用了双精度浮点运算可实现0.01%的最小输出百分比,这是目前国内外最高技术指标的工业用PID控制器。采用此真空控制器可充分发挥电动针阀执行器和薄膜电容规真空传感器的精度优势,而且此系列控制器具有单通道和双通道不同型号。单通道控制器是可编程PID控制器,突出特点是可以进行不同量程双真空计的自动切换来实现全量程自动控制。双通道控制器是一种定点控制器,两个通道可以分别独立控制真空度和温度。[size=18px][color=#990000]三、结论[/color][/size]新型的真空控制系统对短程分子蒸馏工艺的真空度控制过程进行了优化,对其中的真空度控制系统做出了以下三方面的改进:(1)采用电动针阀代替气体质量流量计,提高了进气流量调节执行器的精度。(2)采用薄膜电容规代替拉尼电阻规和电热偶规,提高了真空度测量的精度。(3)采用真空控制器代替传统的PID控制器,提高了PID控制精度,并扩展了控制功能,可实现双传感器自动切换和两个工艺参数同时控制。总之,通过以上改进可大幅提高短程分子蒸馏工艺的真空度控制水平,通过大量考核试验和实际应用已经证明,此解决方案成熟度很高,在全真空度范围内可轻松实现±0.5%的控制精度,如果采用更高精度的真空计,此解决方案可进一步达到±0.1%的控制精度。[align=center][/align][align=center]~~~~~~~~~~~~~~~~~~~~~~[/align]

[color=#ff0000]摘要:针对目前两种典型低温超导测试系统中存在的液氦压力控制精度较差的问题,本文提出了相应的解决方案。解决方案分别采用了直接压力控制和流量控制两种技术手段和配套数控阀门,结合24位AD和16位DA的超高精度的PID真空压力控制器和压力传感器,大幅提高了液氦压力控制精度,最终实现低温超导性能的高精度测试。[/color][color=#ff0000][/color][color=#ff0000][/color][align=center][img=低温超导测试系统中实现高精度液氦温度控制的解决方案,690,411]https://ng1.17img.cn/bbsfiles/images/2023/01/202301031120120633_4214_3221506_3.jpg!w690x411.jpg[/img][/align][align=center]~~~~~~~~~~~~~[/align][size=14px][/size][size=18px][color=#ff0000][b]1. 项目概述[/b][/color][/size] 各种超导部件如超导磁铁和超导腔体在装机前都需要在低温超导测试系统中对其性能进行测试,为了使超导部件达到低温环境则需要将被测部件浸泡在液氦介质内,并采用低温杜瓦盛装液氦介质。在整个测试过程中,对低温测试系统内的液氦压力要求极高,即要求杜瓦顶部氦气压强(绝对压力)有极好的稳定性,否则会导致测试不稳定,给测试结果带来严重误差。 目前国内现有的很多低温超导测试系统都存在液氦压力控制不稳定的严重问题,有些客户提出了相应的技术升级改造要求。 如图1所示的低温超导测试系统中,采用了两个不同口径的第一和第二泄压阀来粗调和细调液氦压力,但这种调节方法的液氦压力只能控制在1.2~1.6Bar范围内,对应4.39~4.74℃范围的液氦温度变化,造成0.35℃的温度波动。目前客户提出要设法将温度波动控制在0.1℃以内或更高的稳定性上,以提高超导部件性能测试精度。[align=center][color=#ff0000][b][img=超导试件测试时氦压控制系统,500,356]https://ng1.17img.cn/bbsfiles/images/2023/01/202301031123466941_8802_3221506_3.jpg!w690x492.jpg[/img][/b][/color][/align][align=center][color=#ff0000][b]图1 低温超导测试系统液氦压力控制装置[/b][/color][/align] 如图2所示的高场超导磁体低温垂直测试系统,其压力控制范围1~1.3Bar,尽管在图2所示系统中采用了液氦加热器来改变液氦压力,但由于压力控制阀的调节精密度不够,最终造成压力控制精度远达不到测试要求,客户也提出了技术改造要求。[align=center][b][color=#ff0000][img=高场超导磁体低温垂直测试系统,400,557]https://ng1.17img.cn/bbsfiles/images/2023/01/202301031123146762_3661_3221506_3.jpg!w522x728.jpg[/img][/color][/b][/align][align=center][b][color=#ff0000]图2 高场超导磁体低温垂直测试系统[/color][/b][/align] 针对上述两种典型低温超导测试系统中存在的液氦压力控制精度不足的问题,本文将提出相应的解决方案。解决方案将分别采用直接压力控制和流量控制两种技术手段和配套数控阀门,结合超高精度的PID真空压力控制器和压力传感器,可大幅度提高液氦压力控制精度,最终减小低温超导性能测试误差。[b][size=18px][color=#ff0000]2. 解决方案[/color][/size][/b] 在图1和图2所示的两种典型低温超导测试系统中,它们各自的液氦压力变化起因不同,因此要实现液氦压力准确控制的技术手段也不同。以下是解决方案中对应的两种不同技术途径。[b][color=#ff0000](1)直接压力调节法[/color][/b] 在图1所示的低温超导测试系统中,造成液氦蒸发的因素并不可控,只能通过调节液氦上方的氦气压力来使得测试系统保持稳定。因此,为了实现液氦上方的压强控制,解决方案采用了直接压力调节法,如图3所示,即采用数控压力控制阀代替图1中的第一和第二泄压阀。此压力控制阀与高精度PID控制器和压力传感器构成闭环控制回路,实现自动泄压和高精度压力控制。[align=center][color=#ff0000][b][img=纯压力控制结构,500,350]https://ng1.17img.cn/bbsfiles/images/2023/01/202301031124390427_8017_3221506_3.jpg!w690x483.jpg[/img][/b][/color][/align][align=center][color=#ff0000][b]图3 直接压力调节法控制装置结构[/b][/color][/align] 数控压力控制阀是一种数控正压减压控制阀,正好可以满足低温超导测试系统的微正压控制需求。通过氦气源和减压阀提供的驱动压力,可在控制阀出口处实现高精度的压力控制,同时还保持很小的漏气以节省氦气。 另外,此数控压力控制阀具有很高的控制精度,结合高精度的压力传感器和PID真空压力控制器,可将液氦压力控制在0.1%的高精度水平。[b][color=#ff0000](2)流量调节法[/color][/b] 在图2所示的低温超低测试系统中,其不同之处之一是具有液氦加热器,即通过液氦加热器和压力控制阀构成的控制回路可进行不同液氦压力的控制,由此实现不同液氦温度的控制。 为实现不同液氦压力的精密控制,解决方案在此采用了流量调节法。如图4所示,解决方案采用了电动针阀作为图2中的压力控制阀,电动针阀与双通道高精度PID控制器、压力传感器和液氦加热器构成闭环控制回路,可以按照任意设定值进行高精度的压力控制。[align=center][color=#ff0000][b][img=流量控制结构,500,290]https://ng1.17img.cn/bbsfiles/images/2023/01/202301031125069440_4211_3221506_3.jpg!w690x401.jpg[/img][/b][/color][/align][align=center][color=#ff0000][b]图4 流量调节法控制装置结构[/b][/color][/align] 电动针阀是一种数控的微小流量调节阀,可通过PID压力控制器自动调节针阀开度,流出的氦气可通向氦气回收气囊。电动针阀同样具有很高的控制精度,结合高精度的压力传感器和PID真空压力控制器,同样可将液氦压力控制在0.1%的高精度水平。[b][size=18px][color=#ff0000]3. 总结[/color][/size][/b] 通过上述解决方案的技术手段,可实现低温超低测试系统中液氦压力的准确控制,控制精度最高可达±0.1%。 按照绝对压力进行计算,饱和蒸气压为1.2Bar时,液氦温度为4.4K。由此,如果压力控制精度为±0.1%,液氦压力的波动范围为±1.2mBar(相当于绝对压力±120Pa),对应的液氦温度波动范围为4.4mK,即所控的液氦温度为4.4±0.0044K。 由此可见,通过本文所述的解决方案,仅通过采用工业级别较低造价的PID真空压力控制器和压力传感器,结合数控压力控制阀和电动针阀,就可实现很高精度的液氦压力控制,温度控制精度可达到mK量级,完全能满足绝大多数低温超导测试系统的需要。[align=center]~~~~~~~~~~~~~~~~~[/align]
基于半导体制冷片的高精度温度控制系统成果简介半导体制冷片是利用特殊半导体材料构成的PN结产生Peltier效应制成,具有无噪声、体积小、结构简单、加热制冷切换方便、冷热转换具有可逆性等优点。化工安全组对基于半导体制冷片温控系统的影响因素进行了全面、系统分析和实验研究,设计完成了大功率、高可靠性的半导体制冷片驱动电路,并积累了半导体制冷片加热制冷切换双向温控算法的丰富经验,形成了半导体制冷片整套的研究方法和应用手段。目前,半导体制冷片的高精度温度控制系统已应用在产品中。系统组成http://ng1.17img.cn/bbsfiles/images/2016/05/201605302259_595308_3112929_3.png 图1 基于半导体制冷片的温度控制单元结构http://ng1.17img.cn/bbsfiles/images/2016/05/201605302259_595309_3112929_3.jpg图2 高精度温度控制系统硬件组成技术指标(1)温度范围:0~120℃;(2)控温精度:±0.05℃;(3)半导体制冷片驱动电路能够最大支持20V 15A输出。http://ng1.17img.cn/bbsfiles/images/2016/05/201605302314_595310_3112929_3.jpg 图3 0℃和120℃温度控制曲线图http://ng1.17img.cn/bbsfiles/images/2016/05/201605302314_595311_3112929_3.jpg 图4 37.8℃温度控制过程曲线图 http://ng1.17img.cn/bbsfiles/images/2016/05/201605302315_595312_3112929_3.jpg 图5 37.8℃稳态控制精度曲线图技术特点(1)高精度温度采集电路:创新性采用比率法和激励换向技术,系统温度分辨力达到0.001℃,检测精度达到±0.01℃。(2)大功率高可靠性的半导体制冷驱动:采用H桥电路形式实现半导体制冷片加热制冷方式的切换,解决了该类驱动电路无死区防护、功率小等问题;设计引入滤波和保护电路,大大增强了半导体制冷片的寿命及驱动电路的可靠性。(3)双向多模式温控:温控策略充分考虑半导体制冷片加热制冷输出功率差异、功率随温度变化以及系统加热制冷方式切换的随机性等因素,综合采用了单点与扫描结合、高低温分段处理、随环境温度变化动态调节等多重温控调节方式。获得研发资助情况浙江省公益项目前期应用示范情况已用于微量蒸气压测定仪产品中的温度控制,温度范围为0~120℃,控温精度为±0.05℃,驱动电路输出12V/10A。相关产品已通过批量试产,温控系统运行稳定可靠,可复制性强,实现成本低,适合于批量生产。转化应用前景半导体制冷片因加热制冷切换方便、结构简单、系统噪音小、控温精确度高以及成本低等优点,有望在科学仪器温度控制、温度发生和电气设备散热等领域获得广泛应用。特别是随着仪器仪表尤其是生命科学仪器、化学分析仪器等逐渐向高精度、小型化方向快速发展,高精度的小型温度控制系统需求越来越旺盛,因此半导体制冷片具有良好的应用前景。合作方式(1)技术转让;(2)委托开发;(3)双方联合开发。应用领域分析仪器、医疗仪器、生命科学测试仪器、家用电器等领域中高精度的恒温、匀速升降温等多模式的温度控制,以及电气装置散热等。联系人:杨遂军;联系电话:0571- 86872415、0571-87676266;Email: yangsuijun1@sina.com。微信公众号:中国计量大学工贸所工贸所网站:itmt.cjlu.edu.cn中国计量大学工业与商贸计量技术研究所中国计量大学是以“计量、测试、标准”为特色的院校,主要培养测试技术、仪器开发方向的专属人才。中国计量大学工业与商贸计量技术研究所是学校为进一步推动高水平研究团队的建设而在2014年设立的两个学科特区之一,主要针对工业生产与贸易往来中关乎国计民生的计量测试问题,以新方法、技术、设备及评价为研究对象,主要研究方向为化工产品及工艺安全测试技术与仪器、零部件无损检测技术与设备、光栅信号处理与齿轮精密测量,涉及的单元技术有高精度温度检测技术、快速热电传感技术、高稳态温度场发生技术、低热惰性高压容器制备工艺、激光和电磁加热、非稳态传热反演、基于幅值分割原理的光栅信号数字细分、光栅信号短周期误差补偿、机器视觉高精度尺寸测量。研究所同时是化工产品安全测试技术及仪器浙江省工程实验室,先后承担国家重大科学仪器设备开发专项、国家公益性行业科研专项、国家自然基金、973等国家级项目,科研经费超千万。现有专职科研人员9人、工程技术人员2人、在读研究生30余人、行政与科研管理人员3人。“应用驱动、产研融合”是研究所的标签,以应用驱动为前提,通过方法技术化、技术产品化、产品市场化,将科研成果落脚于实际应用,为经济与社会发展提供推动力,同时为研究所提供持续发展所需资金、影响力、信息等各类资源的支撑,目前研究所已拥有2家产业化公司。
高精度气体水分含量测量新方法
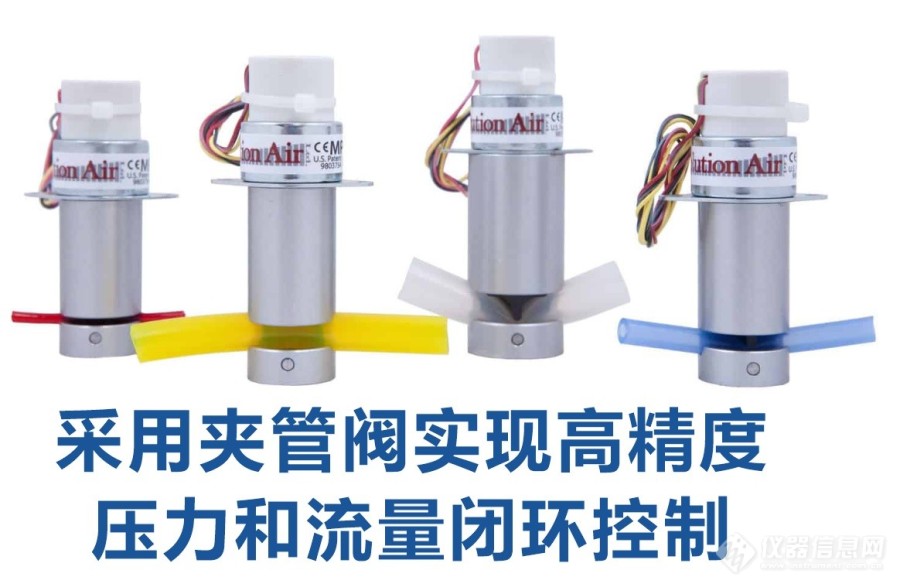
[align=center][b][img=采用夹管阀实现无菌流体系统中的高精度压力和流量控制解决方案,690,450]https://ng1.17img.cn/bbsfiles/images/2023/10/202310181658154269_9598_3221506_3.jpg!w690x450.jpg[/img][/b][/align][size=16px][b][color=#000066][/color][color=#339999]摘要:针对卫生和无菌流体系统中柔性管路内的压力和流量控制,本文介绍了采用电控夹管阀的高精度控制解决方案。解决方案基于反馈控制原理,采用压力传感器或流量传感器进行测量并反馈给程序控制器,控制器驱动夹管阀来改变柔性管路的内径从而实现高精度控制。尽管解决方案只介绍了最基本的夹管阀闭环控制回路,但这种简单控制可以进行多种组合以适用于多种流体介质的压力流量控制。本文同时也介绍了夹管阀应用的局限性和改进方法。[/color][/b][/size][align=center][size=16px][color=#339999][b]=======================[/b][/color][/size][/align][b][size=18px][color=#339999]1. 问题的提出[/color][/size][/b][size=16px] 夹管阀是一种打开或关闭流体路径,而阀体不会与流动介质接触的阀门,也就是流体管路内径的控制依赖于弹性管路外部的挤压压力。夹管阀主体内部不会接触到流体,仅有管路内部会接触流经的液体或气体,可确保流体不会受到污染,且能保持夹管阀的清洁,因此适合做为生物加工、食品工业、饮料工业、剂量系统、自动贩卖机、血液处理/分析、实验室分析、冲洗程序需无菌的生物制药等设备的阀门。与其他闸阀或活塞阀相比,使用夹管阀的主要优点是让阀体不会与腐蚀性流动介质接触,因此无论在使用寿命或卫生方面都更持久、干净。[/size][size=16px] 在夹管阀的实际应用中,往往是通过改变夹管阀挤压压力来调节软管的开度,以控制管路内[url=https://insevent.instrument.com.cn/t/5p][color=#3333ff]液相[/color][/url]和[url=https://insevent.instrument.com.cn/t/Mp][color=#3333ff]气相[/color][/url]介质的输送流量与流速,同时也相应的改变了软管内部的背压压力。夹管阀只是作为一个调节流量和压力的执行器件,还无法进行管路内部压力和流量的闭环自动控制。[/size][size=16px] 为了采用夹管阀实现无菌流体系统中的压力和流量控制,特别是实现高精度的自动控制,本文将介绍一种闭环控制解决方案及其一些具体应用案例。[/size][size=18px][color=#339999][b]2. 解决方案[/b][/color][/size][size=16px] 为了高精度的控制流体介质管路中的压力和流量,本解决方案提出的控制系统如图1所示。解决方案设计的控制系统是一种最基本的控制结构,可以根据实际应用情况进行各种组合。[/size][size=16px] 图1所示的控制系统主要由泵、压力传感器、流量传感器、夹管阀、程序控制器和柔性管材组成,其各组件的功能如下:[/size][size=16px] (1)泵:主要用来驱动流体在柔性管路内流动,相当于一个进液源。[/size][size=16px] (2)压力传感器:测量柔性管路内流动液体的压力,并输出相应的压力测量信号。[/size][size=16px] (3)流量传感器:测量柔性管路内流动液体的流量,并输出相应的流量测量信号。[/size][size=16px] (4)夹管阀:夹管阀采用的是电控式夹管阀,可灵活调节挤压压力,对应最大可夹软管外径7mm,软管壁厚范围0.5~2mm,夹紧留隙调节为0.5~2mm。夹管阀可方便地调节运动滑块的初始位置,灵活适用不同壁厚尺寸的软管。24V直流供电,控制信号为0~5V或0-20mA。[/size][size=16px] (5)程序控制器:程序控制器采用的是VPC2021系列多功能超高精度PID真空压力程序调节器,可接入真空、压力、流量、温度和张力等47种传感器信号,具有串级控制、分程控制、比值控制等高级控制功能,具有控制程序功能和外部设定点功能,具有24位AD、16位DA和0.01%最小输出百分比。控制器自动计算机软件,可由计算机进行远程参数设置和运行操作。[/size][align=center][size=16px][color=#339999][b][img=夹管阀流体压力和流量闭环控制系统结构示意图,600,296]https://ng1.17img.cn/bbsfiles/images/2023/10/202310181700229428_1520_3221506_3.jpg!w690x341.jpg[/img][/b][/color][/size][/align][align=center][size=16px][color=#339999][b]图1 夹管阀流体压力和流量精密控制系统结构示意图[/b][/color][/size][/align][size=16px] 解决方案中的压力和流量控制系统的工作过程是进液通过泵的驱动使流体介质在柔性管道内流动,压力或流量传感器采集相应的压力或流量信号并传输给程序控制器,控制器根据设定值进行比较后输出控制信号驱动夹管阀动作,使管路内的压力或流量准确达到设定值。[/size][size=18px][color=#339999][b]3. 总结[/b][/color][/size][size=16px] 尽管上述夹管阀具有高精度的压力和流量的控制能力和响应速度快的特点,但由于夹管阀会改变柔性管路的内径大小,使得管路内部的背压增大,而这种压力的增大必须要在软管的可承受范围之内,否则很容易造成软管的爆裂或接口爆开。因此,更安全可靠的压力和流量控制方式是不使用夹管阀,而是直接控制进液压力,通过改变进液压力来调节管路内的介质压力和流量。这种进液压力调节有以下三种控制方式:[/size][size=16px] (1)采用转速可调节式泵来改变进液压压力。[/size][size=16px] (2)采用注射泵来改变进液压力和流速。[/size][size=16px] (3)采用进液容器顶部气压控制方式的压力控制器,同时连接外部压力或流量传感器形成闭环控制回路,以改变液池顶部加载压力实现压力和流量的自动控制。[/size][size=16px] 上述的三种控制方式中,顶部气压控制方式的技术优势最为明显,同样可以实现高精度的压力和流量控制,特别是可以应用到微小流量的快速和超高精度控制。[/size][size=16px] 另外,对于微流控芯片技术中所用的微小流量控制,往往会使用到小于1mm的很细软管,这些微细软管内的压力和流量控制则可能不太适合采用夹管阀,这时更适合采用注射泵或压力控制器形式。[/size][align=center][size=16px][color=#339999][b][/b][/color][/size][/align][align=center][size=16px][color=#339999][b][/b][/color][/size][/align][align=center][size=16px][color=#339999][b]~~~~~~~~~~~~~~~[/b][/color][/size][/align]

[size=16px][color=#339999]摘要:针对晶体生长和CVD等半导体设备中对0.1%超高精度真空压力控制的要求,本文对相关专利技术进行了分析,认为采用低精度的真空度传感器、调节阀门和PID控制器,以及使用各种下游控制方法基本不太可能实现超高精度的长时间稳定控制。要满足超高精度要求,必须采用0.05%左右精度的传感器和相应精度的PID控制器,结合1s以内开合时间的高速电动针阀和电动球阀,同时还需采用上游进气控制模式。另外,本文提出的超高精度解决方案中,还创新性的提出了进气混合后的减压恒压措施,消除进气压力波动对超高精度控制的影响。[/color][/size][align=center][size=16px][img=彻底讲清如何实现各种单晶炉的0.1%超高精度真空压力控制,690,290]https://ng1.17img.cn/bbsfiles/images/2023/04/202304071124469579_383_3221506_3.jpg!w690x290.jpg[/img][/size][/align][size=18px][color=#339999][b]1. 问题的提出[/b][/color][/size][size=16px] 在晶体生长和CVD等半导体设备领域,普遍要求对反应腔室的真空压力进行快速和准确控制。目前许多半导体工艺设备的真空压力基本在绝对压力10~400Torr的真空度范围内,通过使用下游节流阀(电动球阀或电动蝶阀)的开度自动变化来调节抽气速率基本能达到1%以内的控制精度。但对于有些特殊晶体生长等生产工艺,往往会要求在0.1~10Torr真空度范围内进行控制,并要求实现0.1%的更高精度控制。[/size][size=16px] 最近有用户提出对现有晶体生长炉进行技术升级的要求,希望晶体炉的真空压力控制精度从当前的1%改造升级到0.1%,客户进行改造升级的依据是宁波恒普真空科技股份有限公司的低造价的压力控制系统,且技术指标是“公司研发的压力传感器和控制阀门及配套的自适应算法,可将压力稳定控制在±0.3Pa(设定压力在100~500Pa间)”。[/size][size=16px] 我们分析了宁波恒普在真空压力控制方面的两个相关专利,CN115113660A(一种通过多比例阀进行压力控制的系统及方法)和CN217231024U(一种碳化硅晶体生长炉的压力串级控制系统),认为采用所示的专利技术可能无法实现100~500Pa全量程范围内0.1%的长时间稳定的控制精度,最多只可能在个别真空点和个别时间段内勉强内达到。本文将对这两项专利所设计的控制方法进行详细技术分析说明无法达到0.1%控制精度的原因,并提出相应的解决方案。[/size][b][size=18px][color=#339999]2. 专利技术分析[/color][/size][/b][size=16px] 宁波恒普公司申报的发明专利“一种通过多比例阀进行压力控制的系统及方法”,其压力控制系统结构如图1所示,所采用的控制技术是一种真空压力动态平衡控制方法中典型的下游控制模式,即固定进气流量,通过调节排气流量实现真空压力控制。[/size][align=center][size=16px][color=#339999][b][img=01.通过双比例阀进行压力控制的系统的示意图,500,244]https://ng1.17img.cn/bbsfiles/images/2023/04/202304071128351485_5277_3221506_3.jpg!w690x338.jpg[/img][/b][/color][/size][/align][align=center][size=16px][color=#339999][b]图1 通过双比例阀进行压力控制的系统的示意图[/b][/color][/size][/align][size=16px] 在动态平衡法控制中,这种下游模式的特点是: (1)非常适用于10~760Torr范围内的高气压精确控制,抽气流量的变化可以很快改变真空腔体内部气压的变化,不存在滞后性,这对于高精度的高压气体控制非常重要,因此这种下游控制模式也是目前国内外绝大多数晶体炉的真空压力控制方法。 (2)并不适用于0.1~10Torr范围内低气压控制,这是因为在低气压控制过程中,抽气速率对低气压变化的影响较为缓慢,存在一定的滞后性,调节抽气速率很难实现低气压范围内的真空度高精度控制。因此,对于低气压高真空的精密控制普遍采用的是上游控制模式,即调节进气流量,利用了低气压对进气流量非常敏感的特性。 宁波恒普公司所申报的发明专利“一种通过多比例阀进行压力控制的系统及方法——CN 115113660A”,如图1所示,所采用的下游控制模式是通过分程(或粗调和细调)形式来具体实现,即通过次控制阀开度改变抽气口径大小后,再用主控制阀开度变化进行细调,本质还是为了解决抽气速率的精细化调节问题。 这种抽气速率分段调节的类似方法在国内用的比较普遍,较典型的如图2所示的浙江晶盛公司专利“一种用于碳化硅炉炉腔压力控制的控压装置——CN210089430U”,采用的就是多个分支管路进行下游模式控制,多个分支管路组合目的就是调节抽气口径大小。[/size][align=center][b][size=16px][color=#339999][img=02.下游控制整体结构示意图,500,450]https://ng1.17img.cn/bbsfiles/images/2023/04/202304071129101289_1324_3221506_3.jpg!w690x621.jpg[/img][/color][/size][/b][/align][align=center][b][size=16px][color=#339999]图2 下游多支路真空压力控制结构示意图[/color][/size][/b][/align][size=16px] 宁波恒普公司另一个实用新型专利CN217231024U(一种碳化硅晶体生长炉的压力串级控制系统),如图3所示,也是采用下游控制模式。[/size][align=center][b][size=16px][color=#339999][img=03.晶体生长炉的压力串级控制系统的结构示意图,450,361]https://ng1.17img.cn/bbsfiles/images/2023/04/202304071132344137_9996_3221506_3.jpg!w690x555.jpg[/img][/color][/size][/b][/align][align=center][b][size=16px][color=#339999]图3 下游串级控制系统结构示意图[/color][/size][/b][/align][size=16px] 在晶体生长和其他半导体工艺的真空压力控制中,国内外普遍都采用下游控制模式而很少用上游控制模式,主要原因如下:[/size][size=16px] (1)绝大多数工艺对气氛环境的要求是高气压(低真空)范围内控制,如10~500Torr(绝对压力),且控制精度能达到1%即可。这种要求,最适合的控制方法就是下游模式。[/size][size=16px] (2)绝大多数半导体工艺都需要输入多种工作气体,而且各种工作气体还要保持严格的质量和比例,所以进气控制基本都采用气体质量流量计。如果在质量和比例控制之后,再对进气流量进行控制,一是没有必要,二是会增加技术难度和设备成本。[/size][size=16px] (3)在下游控制模式中安装节流阀(电动蝶阀)比较方便,可以在真空泵和腔体之间的真空管路上安装节流阀,而且对节流阀的拆卸和清洗维护也较方便。[/size][size=16px] 国内有些厂家在下游模式中采用上述分程控制方法的动机主要是为了规避使用高速和高精度但价格相对较贵的下游节流阀(电动蝶阀),这种高速高精度下游节流阀主要是具有1秒以内的全程闭合时间,直接使用这种高速蝶阀就可以在高气压范围内实现低真空度控制。而绝大多数国产真空用电动球阀和电动蝶阀尽管价格便宜,但响应速度普遍在几十秒左右,这使得压力控制的波动性很大。所以为了使用国产慢速电动蝶阀,且保证控制精度,只能在下游管路上想办法。[/size][size=16px] 如果采用高速电动球阀或电动蝶阀,且真空计和控制器达到一定精度,则采用任何形式的下游模式控制方式都可以在低气压范围内轻松实现1%的控制精度,但无法达到0.1%的控制精度。而如果采用低速阀门和上述专利所述的控制方法,也有可能达到1%控制精度,但更是无法实现更高精度0.1%的真空压力控制。[/size][b][size=18px][color=#339999]3. 超高精度真空压力控制方法及其技术[/color][/size][/b][size=16px] 晶体生长炉的真空压力控制也是一种典型的闭环PID控制回路,回路中包括真空泵、真空计、电动阀门和PID控制器。其中真空泵提供真空源,真空计作为真空压力测量传感器,电动阀门作为执行器调节进气或出气流量,PID控制器接收传感器信号并与设定值进行比较和PID计算后输出控制信号给执行器。[/size][size=16px] 这里我们重点讨论在0.1~10Torr的低气压(高真空)范围内实现0.1%超高精度的控制方法和相关技术。依据动态平衡法控制理论以及大量的实际控制试验和成功应用经验,如果要实现上述低压范围内(0.1~10Torr)的高精度控制,必须满足以下几个条件,且缺一不可:[/size][size=16px] (1)真空泵要具备覆盖此真空度范围的抽取能力,并尽可能保持较大的抽速,由此在高温加热过程中的气体受热膨胀压力突增时,能及时抽走多余的气体。[/size][size=16px] (2)真空计和PID控制器要具有相应的测量和控制精度。[/size][size=16px] (3)采用上游控制模式,并需采用高速电动针阀自动和快速的调节进气流量大小。[/size][size=16px] 国内外晶体生长炉和半导体工艺的真空压力控制,普遍采用的是薄膜电容真空计,价格在一万元人民币左右的这种进口真空计,测量精度基本在0.25%左右。这种真空计完全可以实现0.5 ~ 1%的控制精度,但无法满足更高精度控制(如0.1%)中的测量要求,更高精度的真空度测量则需要采用0.05%以上精度的昂贵的薄膜电容真空计。[/size][size=16px] 同样,对于PID控制器,也需要相应的测量精度和控制精度。如对于0.25%精度的真空计,采用16位AD、12位DA和0.1%最小输出百分比的PID控制器,可以实现1%以内的控制精度,这在相关研究报告中进行过专门分析和报道。若要进行更高精度的控制,则在采用0.05%精度真空计基础上,还需采用24位AD、16位DA和0.01%最小输出百分比的PID控制器。[/size][size=16px] 宁波恒普公司在其官网的压力控制技术介绍中提到,采用恒普自己研发的压力传感器和控制阀门及配套的自适应算法,在绝对压力100~500Pa范围内可将国内外现有技术的±3Pa压力波动(控制精度在1%左右)提升到±0.3Pa(控制精度在0.1%左右),控制精度提高了一个数量级。我们分析认为:在绝对压力100~500Pa的低压范围内,如果不能同时满足上述的三个条件,基本不太可能实现0.1%的超高精度控制。[/size][b][size=18px][color=#339999]4. 超高精度真空压力控制技术方案[/color][/size][/b][size=16px] 对于超高精度真空压力控制解决方案,我们只关心前述条件的第二和第三点,不再涉及真空泵内容。[/size][b][color=#339999] (1)超高精度真空计的选择[/color][/b][size=16px] 目前国际上能达到0.05%测量精度的薄膜电容真空计有英福康和MKS两个品牌,如图4所示。这类超高精度的真空计都有模拟信号0~10V输出,数模转换是20位。[/size][align=center][b][size=16px][color=#339999][img=04.超高精度薄膜电容真空计,550,240]https://ng1.17img.cn/bbsfiles/images/2023/04/202304071130184466_8776_3221506_3.jpg!w690x302.jpg[/img][/color][/size][/b][/align][align=center][b][size=16px][color=#339999]图4 超高精度0.05%薄膜电容真空计 (a)INFICON Cube CDGsci;(b)MKS AA06A[/color][/size][/b][/align][size=16px][b][color=#339999] (2)超高精度PID控制器的选择[/color][/b] 从上述真空计指标可以看出,真空计的DAC输出是20位的0~10V模拟型号,那么真空压力控制器的数据采集精度ADC至少要20位。为此,解决方案选择了目前最高精度的工业用PID控制器,如图5所示,其中24位AD、16位DA和0.01%最小输出百分比。所选控制器具有单通道和双通道两种规格,这样可以分别用来满足不同真空度量程的控制,双通道控制器可以用来同时采集两只不同量程的真空计而分别控制进气阀和抽气阀实现真空压力全量程的覆盖控制。另外PID控制器还具有标准的RS485通讯和随机配套计算机软件。[/size][align=center][b][size=16px][color=#339999][img=05.高速电动阀门和超高精度PID调节器,650,237]https://ng1.17img.cn/bbsfiles/images/2023/04/202304071130375986_9640_3221506_3.jpg!w690x252.jpg[/img][/color][/size][/b][/align][align=center][b][size=16px][color=#339999]图5 超高精度PID真空压力控制器和高速电动阀门[/color][/size][/b][/align][size=16px][b][color=#339999] (3)高速电动阀门选择[/color][/b] 高速电动阀门主要包括了真空用电动针阀和电动球阀,都有极小的漏率。如图5所示,其中电动针阀用于微小进气流量的快速调节,电动球阀用于大排气流量的快速调节,它们的全程开启闭合速度都小于1s,控制电压都为0~10V模拟信号。[b][color=#339999] (4)超高精度0.1%压力控制技术方案[/color][/b] 基于上述关键部件的选择,特别是针对0.1~10Torr范围内的0.1%超高精度真空压力控制,本文提出的控制系统具体技术方案如图6所示。[/size][align=center][b][size=16px][color=#339999][img=06.超高精度真空压力控制系统结构示意图,600,325]https://ng1.17img.cn/bbsfiles/images/2023/04/202304071131004546_6716_3221506_3.jpg!w690x374.jpg[/img][/color][/size][/b][/align][align=center][b][size=16px][color=#339999]图6 超高精度真空压力控制系统结构示意图[/color][/size][/b][/align][size=16px] 如前所述,在0.1~760Torr的真空压力范围内,分别采用了量程分别为10Torr和1000Torr的两只超高精度真空计,并分别对应上游和下游控制模式来进行覆盖控制,真空源为真空泵。[/size][size=16px] 在10~750Torr范围内,采用下游控制模式,即控制器的第一通道用来控制电动针阀的进气开度保持固定,第二通道用来检测真空计信号,并根据真空压力设定值自动PID调节电动球阀的开度变化实现准确控制。[/size][size=16px] 在0.1~10Torr范围内,采用上游控制模式,即控制器的第二通道用来控制电动球阀的进气开度保持固定(一般为全开),第二通道用来检测真空计信号,并根据真空压力设定值自动PID调节电动针阀的开度变化实现准确控制。[/size][size=16px] 由于电动针阀调节的是总进气流量,所以在具体工艺中需要将多种工作气体先进行混合后再流经电动针阀,而且多种工作气体通过相应的气体质量流量计(MFC)来控制各种气体所占比例,然后进入混气罐。在0.1~10Torr范围内的超高精度控制中,进气压力的稳定是个关键因素。为此,解决方案中增加了一个减压恒压罐,并采用正压控制器对混合后的气体进行减压,使恒压罐内的压力略高于一个大气压且恒定不变。[/size][size=16px] 解决方案中的超高精度PID控制器具有RS485接口并采用标准的MODBUS通讯协议,可以通过配套的计算机软件直接对控制器进行各种设置和操作运行,并显示、存储和调用各种控制参数的变化曲线,这非常便于整个工艺控制过程的调试。工艺参数和过程调试完毕后,可连接PLC上位机进行简单的编程就能与工艺设备控制软件进行集成。[/size][size=16px] 综上所述,本文设计的解决方案,结合相应的超高精度和高速的传感器、电动阀门和PID控制器,能够彻底解决超高精度且长时间的真空压力控制难题,可以满足生产工艺需要。[/size][b][size=18px][color=#339999]5. 总结[/color][/size][/b][size=16px] 晶体生长和半导体材料的生产过程往往需要较长的时间,工艺过程中的真空压力控制精度必须还要考虑长时间的控制精度,仅仅某个真空度下或短时间内达到控制精度并不能保证工艺的稳定和产品质量。[/size][size=16px] 在本文的解决方案中,特别强调了一是必须采用相应高精度和高速的传感器、执行器和控制器,二是必须采用相应的上游或下游控制方式,否则,如果仅靠复杂PID控制算法根本无法通过低精度部件实现高精度控制,特别是在温度对真空压力的非规律性严重影响下更是如此,这在太多的温度和正压控制中得到过证明,也是一个常识性概念。[/size][size=16px] 对于超高精度的真空压力控制,本文创新性的提出了稳定进气压力的技术措施,其背后的工程含义也是先粗调后细调,尽可能消除外界波动对控制精度的影响,这在长时间内都要求进行超高精度稳定控制中尤为重要。[/size][size=16px] 这里需要说明的是,实现超高精度控制的代价就是昂贵的硬件装置,如超高精度的电容真空计。尽管在高速电动阀门和超高精度PID控制器上已经取得技术突破并降低了价格,但在薄膜电容真空计方面国内基本还处于空白阶段。除非在超高精度电容真空计上的国内技术取得突破,可以使得造价大幅降低,否则将不可避免使得真空压力控制系统的成本增大很多,而目前在国内还未看到这种迹象。[/size][align=center][size=16px]~~~~~~~~~~~~~~~~~~~~~~[/size][/align]
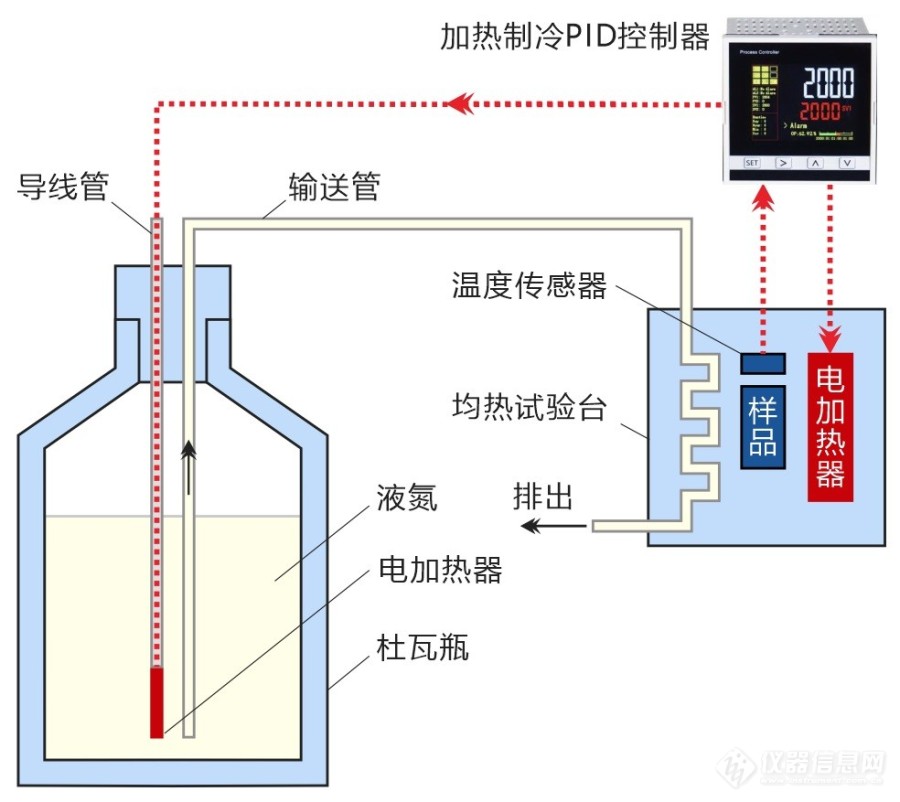
[size=16px][color=#339999][b]摘要:当前各种测试仪器中的低温温度控制过程中,普遍采用电增压液氮泵进行制冷和辅助电加热形式的控温方式。由于液氮温度和传输压力的不稳定,这种方式的控温精度仅能达到0.5K,很难实现小于0.1K的高精度控温。为此本文基于饱和蒸气压原理提出了液氮温区高精度温度控制解决方案,通过对液氮罐内的正压压力进行恒定控制,使液氮温度处于准确稳定状态并提供恒定的液氮输送流量,为后续试验台的电加热控温提供了稳定的制冷量。[/b][/color][/size][align=center][size=16px][color=#339999][b]---------------------------[/b][/color][/size][/align][size=18px][color=#339999][b]1. 问题的提出[/b][/color][/size][size=16px] 液氮作为一种廉价且易于获得的低温介质,在科学仪器领域的低温环境实现中应用十分广泛,如各种各种探测器、热分析仪(TGA,STA,TMA,DMA,DMTA)、激光器、电子显微镜和各种低温试验平台等,都在采用液氮进行低温控制。在这些液氮温度范围内的低温控制系统中,普遍采用加压泵送方式将液氮传输到指定容器或试验平台中,如果进行低温宽温区的温度控制则还需在低温管路和试验平台上增加辅助加热器进行温度调节和控制。[/size][size=16px] 现有的加压输送液氮的手段主要是基于增大液氮罐内压力,从而将液氮压出,具体增加罐内压力的方式是通气法和电加热法。这两种方式利用了液氮自身物理变化而获得液氮蒸汽压力,没有借助其他介质的加压,不会影响液氮的纯度,关键是可以采用不同压力输送出低温氮气和气液混合液氮,以满足不同低温温度的需要。[/size][size=16px] 由于电加热方式结构简单,加热功率大且易于控制,液氮输送速度速度快,目前绝大多数低温温度控制多采用这种电加热方式的液氮泵,结合试验台上配备辅助电加热器,可对试验台或样品温度进行一定精度的低温温度控制。这种液氮试验平台的温度控制系统典型结构如图1所示。[/size][align=center][size=16px][color=#339999][b][img=常用液氮冷却低温温度控制系统结构示意图,500,444]https://ng1.17img.cn/bbsfiles/images/2023/07/202307271408453472_5868_3221506_3.jpg!w690x614.jpg[/img][/b][/color][/size][/align][align=center][size=16px][color=#339999][b]图1 常用液氮冷却低温温度控制系统结构示意图[/b][/color][/size][/align][size=16px] 如图1所示的常用低温控制系统,通过液氮冷却并配合加电热器的正反向PID调控可实现低温温度控制,但这种方式只适用于远离液氮沸点区域(≥110K)的低温控制,不能在接近液氮沸点附近(77~110K)达到优于±0.1K以内的高精度控温,因为在接近液氮沸点附近存在气液两相共存状态,这两种状态在接近液氮沸点的温度区域非常不稳定,特别是在杜瓦瓶内压力波动较大时极易出现两相互转现象,从而导致冷却温度出现比较大的无规律波动。[/size][size=16px] 另一个影响低温温度产生无法控制波动的因素是室温环境对输送管路和阀门内液氮的加热作用,这对高精度的低温控制影响十分明显且不稳定。[/size][size=16px] 由于冷却温度波动较大,尽管在试验台上采用了高导热材料进行快速均温,以及辅助电加热器进行补偿调节,但这种常用的流动液氮形式低温控制方法也只能勉强达到±0.5K的控温精度,基本无法提高低温温度的高精度控制。由此可见,在必须采用流动液氮进行低温冷却的情况下,实现高精度的低温控制是个需要解决的技术问题,为此本文提出如下解决方案。[/size][size=18px][color=#339999][b]2. 解决方案[/b][/color][/size][size=16px] 根据影响高精度低温控制的压力因素和室温环境加热因素,基于饱和蒸汽压时气液处于两相平衡的物理现象,本文提出的解决方案所设计的流动液氮高精度低温温度控制系统如图2所示,实现高精度低温控制的具体方法主要包括以下两方面的内容:[/size][align=center][size=16px][color=#339999][b][img=高精度液氮冷却低温温度控制系统结构示意图,500,468]https://ng1.17img.cn/bbsfiles/images/2023/07/202307271409104704_2148_3221506_3.jpg!w690x647.jpg[/img][/b][/color][/size][/align][align=center][size=16px][color=#339999][b]图2 高精度液氮冷却低温控制系统结构示意图[/b][/color][/size][/align][size=16px] (1)对液氮罐内气体压力进行高精度恒定控制,使杜瓦瓶中的液氮始终处于已知可控的温度下,由此获得温度和流量稳定的液氮输出源。[/size][size=16px] (2)液氮输出管路中,避免使用很难进行绝热处理的各种阀门,而是采用了真空输送管,最大限度减小室温环境对管路内液氮的影响。[/size][size=16px] 此解决方案的核心是将液氮温度控制和试验台温度控制分开构成两个独立控制回路,通过双通道PID控制器同时进行控制,具体如下:[/size][size=16px] (1)压力控制通道是由压力传感器、电加热器和PID控制器第一通道构成的闭环回路,通过调节电加热器功率使杜瓦瓶内气体的正压压力保持恒定,使得整个杜瓦瓶内的气液两相液氮温度相同,此压力同时将液氮压出进行输送。[/size][size=16px] (2)加热控制通道是由温度传感器、电加热器和PID控制器第二通道构成的闭环回路,在加载到均热试验台上的制冷量恒定的条件下,通过调节电加热器功率使样品控制在不同的设定温度上,由此最终实现样品不同低温温度的精密控制。[/size][size=16px] 对于液氮输送管的热防护,尽管采用了液氮真空输送管,但要做好输送管两端的隔热防护,尽可能减少室温环境的加热影响。[/size][size=18px][color=#339999][b]3. 总结[/b][/color][/size][size=16px] 综上所述,通过上述解决方案,可很好的解决液氮温度精密控制问题,关键是采用控压方式可使得杜瓦瓶内的液氮温度保持恒定,压力稳定的同时也使得所液氮介质的压出流量也同样稳定,这使得液氮介质的整个输送过程处于可控稳定状态,为高精度低温控制提供了最为重要的温度稳定的冷媒。[/size][size=16px][/size][align=center][b][color=#339999]~~~~~~~~~~~~~~~[/color][/b][/align][size=16px][/size]

[align=center][img=玻璃窑炉精密压力控制解决方案,600,293]https://ng1.17img.cn/bbsfiles/images/2023/10/202310131721313475_1541_3221506_3.jpg!w690x338.jpg[/img][/align][size=16px][b][color=#333399]摘要:在玻璃生产中对玻璃窑炉中窑压的要求极高,通常需要控制微正压[/color][color=#333399]4.7Pa(表压),偏差控制在±0.3Pa,而窑炉压力还会受到众多因素的影响,所以实现高稳定性的熔窑压力控制具有很大难度,为此本文提出了新的解决方案对现有玻璃窑炉压力控制系统进行改进。解决方案采用不同口径双蝶阀并联结构进行排气,并通过使用高速蝶阀、高精度压力传感器和超高精度分程式压力控制器,可大幅度提高窑炉压力的控制精度和稳定性。[/color][/b][/size][align=center][size=16px][color=#333399][b]=====================[/b][/color][/size][/align][size=18px][color=#333399][b]1. 问题的提出[/b][/color][/size][size=16px] 窑炉是玻璃生产制造过程使用的重要设备之一,担负着熔化原材料、调节玻璃液气泡等缺陷。在玻璃生产中对玻璃窑炉中窑压的要求极高,通常需要控制微正压4.7Pa(表压),偏差控制在±0.3Pa,因此需要极其精确的窑压检测和灵敏准确的窑压控制。在玻璃生产中,影响窑炉压力主要有以下几方面的因素:[/size][size=16px] (1)窑炉温度需控制在上千摄氏度的高温环境才能使原材料熔制成均匀、无气泡的玻璃液,如此高温环境往往使部分原材料在窑炉熔化时易产生大量气体,导致窑炉内的玻璃液位波动大,使得窑炉内的压力不稳定,进而干扰生产工艺,影响玻璃液的品质。[/size][size=16px] (2)玻璃熔窑由于采用的热源不同,结构形式有较大差别,如火焰熔窑、电熔窑和火焰?电熔窑具有不同的结构,而且玻璃液与生产窑内部顶侧壁之间留有气体空间,受玻璃液进液量的影响,也会引起玻璃窑内气体空间的压力时常变化。[/size][size=16px] (3)在实际生产中,受外界天气变化、窑炉外部环境变化以及窑炉内部温度变化等多种的影响,导致窑炉内外的压力差产生波动,导致玻璃液位波动进而影响窑炉压力变化。[/size][size=16px] (4)此外,从玻璃窑炉中排出的烟气带有较高的热量,且国家对玻璃窑废气的环保标准越来越高,为了充分利用此部分热量和减少环境污染,达到节能减排的目的,现有的玻璃窑炉一般都连接有余热回收装置和除尘装置,这些装置对于玻璃窑炉中的压力稳定也会产生影响。[/size][size=16px] 目前,国内常用玻璃窑炉压力控制系统的典型结构如图1所示,其工作原理是通过控制器采集压力传感器与压力设定值进行比较后输出控制信号,控制信号分别驱动引风机改变功率和调节闸板开度来实现熔窑内的压力稳定。但这种引风机和闸板在排气烟道内的串联结构很难实现高稳定性的压力控制,为此本文提出了改进的解决方案,以更好实现玻璃熔窑内压力的长时间的稳定控制,并快速降低各种影响因素对压力稳定的影响。[/size][align=center][size=16px][color=#333399][b][img=现有玻璃窑炉的典型压力控制系统结构,600,333]https://ng1.17img.cn/bbsfiles/images/2023/10/202310131722577919_8122_3221506_3.jpg!w690x383.jpg[/img][/b][/color][/size][/align][align=center][size=16px][color=#333399][b]图1 现有玻璃窑炉的典型压力控制系统结构[/b][/color][/size][/align][size=18px][color=#333399][b]2. 解决方案[/b][/color][/size][size=16px] 改进后的解决方案将采用以下几方面的技术措施来实现窑炉压力的稳定控制:[/size][size=16px] (1)图1所示的风机和调节闸板的串联结构使得烟道内的排气速率完全受到风机和闸板两者之一的最小流量限制,很难实现既要保持正压、又要控制压力微小波动。为此,解决方案将采用如图2所示的并联结构,即在主烟道上并联一个小口径的旁路烟道,这样既能保证以较大抽速使高温下的窑炉压力快速回归至微正压附近,同时又能采用旁路的较小抽速进行精细调节使压力稳定。[/size][align=center][color=#333399][b][img=改进后的玻璃窑炉高精度压力控制系统结构,600,350]https://ng1.17img.cn/bbsfiles/images/2023/10/202310131724197314_7449_3221506_3.jpg!w690x403.jpg[/img][/b][/color][/align][b][/b][align=center][b][color=#333399]图2 改进后的玻璃窑炉高精度压力控制系统结构[/color][/b][/align][size=16px] (2)使风机处于全速工作状态,而在主烟道和旁路烟道上分别增加不同口径、且具有较快响应速度(1秒以内)的电动通风蝶阀。这样,通过不同口径高速蝶阀的快速开度变化,可以对窑炉压力进行快速调节并达到稳定。[/size][size=16px] (3)压力传感器的测量精度是决定玻璃窑炉内部压力稳定控制的关键要素之一,因此本解决方案采用了0.1%的高精度压力传感器,压力测量范围尽可能的小,如0~100Pa(表压)。[/size][size=16px] (4)决定窑炉压力稳定控制的另一个关键因素是压力控制器的测量精度、控制精度和控制模式,为此本解决方案选择了VPC2021系列超高精度压力控制器,其具有24位AD、16位DA和最小输出百分比为0.01%,这是目前工业用PLC根本无法实现的测控精度。另外,VPC2021系列压力控制器具有分程控制功能,可同时对两个不同口径通风蝶阀进行快速控制,且控制器同时还具有PID参数自整定功能、标准的MODBUS通讯协议和相应的计算机测控软件。[/size][size=18px][color=#333399][b]3. 总结[/b][/color][/size][size=16px] 综上所述,解决方案通过采用不同口径双蝶阀并联结构,可在排气方式上既能实现大流量排气,又能进行微小排气流量的调节,从结构上保证了窑炉压力的稳定性控制。另外,通过采用高速蝶阀、高精度压力传感器和超高精度分程式压力控制,从自动控制方面更进一步的保证了压力控制精度,比传统的PLC控制具有更好的控制精度和稳定性。[/size][size=16px][/size][align=center][size=16px][color=#333399][b]~~~~~~~~~~~~~~~[/b][/color][/size][/align]
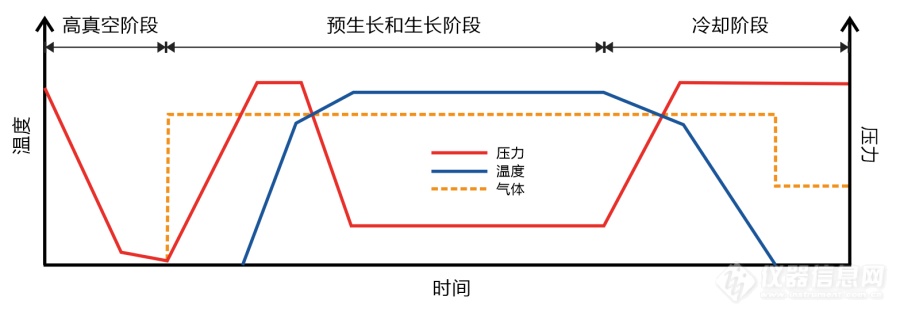
[color=#990000]摘要:本文针对目前PVT法SiC单晶生长过程中真空压力控制存在的问题,进行了详细的技术分析,提出了相应的解放方案。解决方案的核心方法是采用上游和下游同时控制方式来大幅提高全压力范围内的控制精度和稳定性,关键装置是低漏率和高响应速度的电动针阀、电动球阀和超高精度的工业用PID控制器。通过此解决方案可实现对相应进口产品的替代。[/color][align=center]~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~[/align] [size=18px]一、问题的提出[/size]碳化硅单晶材料,作为宽带隙半导体材料,具有优异的物理特性和电学性能,特别适合于制造高温、高频、大功率、抗辐射、短波长发光及光电集成器件,因此被广泛应用于航空、航天、雷达、通讯等领域。目前,碳化硅单晶的生长一般采用PVT法工艺。由于碳化硅单晶生长的最终目的是为了获取大尺寸、低缺陷的碳化硅单晶,随着碳化硅单晶的尺寸增大,对单晶炉内的真空压力控制要求极高,工艺气体的压力变化对SiC晶体的生长速度和晶体质量产生极大影响。图1所示为一典型SiC单晶生长工艺中压力、温度和工艺气体随时间的变化曲线。[align=center][color=#990000][img=01.碳化硅生长中随时间的压力、温度和气体变化过程,690,242]https://ng1.17img.cn/bbsfiles/images/2022/09/202209161032399187_2475_3221506_3.png!w690x242.jpg[/img][/color][/align][align=center][color=#990000]图1 PVT法碳化硅单晶生长过程中压力、温度和气体的随时间变化过程[/color][/align]从图1所示的工艺曲线可以看出,晶体生长炉内的压力控制是一个全真空度范围的精密变化过程,整个真空度变化范围横跨低真空和高真空(10-4Pa~105Pa),特别是在10-1Pa~105Pa的低真空范围内需要精密控制。目前在利用PVT法制备SiC单晶时,普遍还存在以下几方面问题。(1)普遍采用下游模式(调节出气速率)控制全过程的真空度变化,在0.1~1000Pa的较高真空区间控制精度极差,晶体生长容器内的压力波动大(约±10%)。(2)真空控制装置所采用的调节阀和PID控制器基本都采用MKS、VAT和CKD等公司的上游流量控制阀(Upstream Flow Control Valves)、下游排气节流阀(Downstream Exhaust Throttle Valves)及其配套的PID阀门控制器(PID Valve Controllers)。尽管为了降低成本目前已有多种集成了PID控制器的一体式结构的下游排气节流阀,但整体造价还是较高。(3)真空压力国产化替代产品也在逐步兴起,但普遍还存在阀门漏率大、阀门调节响应时间长和不同量程真空计无法自动切换等问题,致使无法同时采用上游和下游控制模式实现全量程范围内的真空压力高精度控制。本文将针对上述PVT法SiC单晶生长过程真空压力控制存在的问题,进行详细的技术分析,并提出相应的解放方案。解决方案的核心是采用上游和下游同时控制方式来大幅度提高全压力范围内的控制精度和稳定性,并介绍相应的低漏率和高响应速度的真空用电动针阀、电动球阀和超高精度的工业用PID控制器,由此实现对相应进口产品的替代。[size=18px][color=#990000]二、碳化硅晶体生长的压力变成过程分析[/color][/size]图1所示为目前PVT法第三代碳化硅单晶生长过程中的压力、温度和气体流量变化曲线,其中红线表示了非常典型的真空压力变化过程。通过对真空压力各个阶段的变化过程进行分析,以期深入理解PVT法SiC单晶生长过程中对真空压力变化的要求。如图1所示,SiC单晶生长过程中真空压力的变化分为以下几个阶段:(1)高真空阶段:在高真空阶段,需要通过机械泵和分子泵在晶体生长容器内形成高真空(1×10-3Pa~1×10-5Pa),以清除容器和物料内的空气和水分。此高真空阶段要求气压需要以较慢的恒定速率进行降压,由此来避免碳化硅粉料形成扬尘。(2)预生长阶段:同理,在预生长阶段,随着工艺气体的充入和温度的逐渐升高,也要求容器内的气压按照恒定速率逐渐升至常压或微正压,此烘烤和气体置换进一步清除空气和水分。(3)生长阶段:在晶体生长阶段要求容器气压按照恒定速度逐渐降低到某一设定值(生长压力),并保持长时间恒定。不同的生长设备和工艺一般会采用不同的生长压力,专利“一种碳化硅晶体的破碎晶粒用于再生长碳化硅单晶的方法”CN114182357A中,生长压力为200~ 2000Pa;专利CN114214723A“一种准本征半绝缘碳化硅单晶的制备方法”中,生长压力为10000~80000Pa;专利CN215404653U“碳化硅单晶生长控制装置”中,生长压力控制在0.2~0.7Pa范围内;专利CN217231024U“一种碳化硅晶体生长炉的压力串级控制系统”中,生长压力范围为100~500Pa。由此可见,所涉及的生长压力是一个从0.2Pa至80kPa的宽泛区间。(4)冷却阶段:在冷却阶段,随着温度的逐渐降低,要求容器内的气压按照恒定速率逐渐升至常压或微正压。从上述单晶生长过程中气压变化的几个阶段可以看出,真空压力控制装置要达到以下主要技术指标,而这些也基本都是进口产品已经达到的技术指标。(1)漏率:小于1×10-7Pa.m3/s(2)控制精度和长期稳定性:在任意真空压力下,控制精度优于1%(甚至0.5%),长期稳定性优于1%(甚至0.1%)。(3)响应速度:小于1s。响应速度往往也决定了控制精度和长期稳定性,特别是在温度和流量的共同影响下,真空压力会产生快速波动,较快的响应速度是保证精密控制的关键。(4)连接不同量程真空计:可连接2只不同量程电容真空计以覆盖整个真空压力测量控制范围,并可根据相应真空度进行传感器的自动切换和控制。(5)可编程控制:可编程进行任意压力控制曲线的设置,并可存储多条控制曲线以便不同工艺控制的调用。(6)PID参数:可自整定,并可存储和调用多组PID参数。(7)上位机通讯:与上位机(如PLC和计算机)进行通讯,并具有标准通讯协议。[size=18px][color=#990000]三、高精度真空压力控制解决方案[/color][/size]从上述分析可以得知,不同的碳化硅晶体生长工艺所需的压力是一个从0.2Pa至80kPa的宽泛区间,目前国内外在晶体生长工艺压力过程中普遍都采用下游控制模式,即在真空泵和生长容器之间安装节流阀,通过恒定上游进气流量,通过节流阀调节下游排气流量来实现真空压力控制。对于大于1kPa的高气压区间,这种下游控制模式十分有效可实现压力精密控制,但对于低压区间(0.1Pa~1kPa),下游模式的控制效果极差,必须要采用调节进气流量和恒定下游抽气流量的上游控制模式。上游模式控制方法在碳化硅单晶生长工艺中应用的一个典型案例是专利 CN217231024U“一种碳化硅晶体生长炉的压力串级控制系统”,其中生长阶段的压力范围为100~500Pa,可将压力稳定控制在±0.3Pa。另外,上游控制模式已经广泛应用在真空控制领域,我们在以往的实际应用和验证试验中也都证实过上游模式可实现1kPa以下低气压的精确控制。综上所述,要实现0.2Pa至80kPa全范围内的真空压力精密控制,需要分别采用上游和下游模式。由此,我们提出了可同时实施上游和下游模式的真空压力高精度控制解决方案,这种上下游同时进行控制的真空压力控制系统结构如图2所示。[align=center][color=#990000][img=02.上下游双向真空压力控制系统结构示意图,550,375]https://ng1.17img.cn/bbsfiles/images/2022/09/202209161032552585_1956_3221506_3.png!w690x471.jpg[/img][/color][/align][align=center][color=#990000]图2 上下游双向真空压力控制系统结构示意图[/color][/align]在图2所示的解决方案中,采用了两只电容真空计来覆盖0.2Pa至80kPa的全真空量程,真空计的测量信号传送给PID控制器,由PID控制器分别驱动上游的电动针阀和下游的电动球阀,由此闭环控制回路实现全量程范围内的真空压力精密控制。真空压力的具体控制过程是:(1)当压力控制设定值位于大于1kPa的高气压范围时,PID控制器处于下游控制模式,PID控制器调节上游的电控针阀为恒定开度,并对下游的电控球阀进行PID自动调节,通过快速调整电控球阀的开度变化使生长容器内的压力测量值快速等于设定值。(2)当压力控制设定值位于小于1kPa的低气压范围时,PID控制器处于上游控制模式,PID控制器调节下游的电控球阀为恒定开度,并对上游的电控针阀进行PID自动调节,通过快速调整电控针阀的开度变化使生长容器内的压力测量值快速等于设定值。[size=18px][color=#990000]四、配套装置的国产化替代[/color][/size]本文提出的解决方案,在真空计、电控阀门和PID控制器满足技术指标要求的前提下,可实现高精度的真空压力控制,通过实际应用和考核试验都验证了控制精度可以达到真空计的最高精度,稳定性可以轻松达到设定值的±0.5%,甚至在大部分真空压力量程内稳定性可以达到设定值的±0.1%。在进行0.1Pa~100kPa范围内的真空度控制过程中,目前真空技术应用领域普遍采用是国外产品,比较典型的有INFICON、MKS、VAT和CKD等公司的薄膜电容真空计、上游流量控制阀、下游排气节流阀及其配套的PID阀门控制器。随着国产化技术的发展,除了薄膜电容真空计和高速低漏率电动蝶阀之外,其他真空压力控制系统的主要配套装置已经完全实现了国产化,低漏率和快速响应等关键技术的突破,使整体技术指标与国外产品近似,PID控制器与国外产品相比具有更高的测控精度,并且还具有国外产品暂时无法实现的双向模式控制功能,真空压力控制比国外产品具有更高的控制精度和稳定性。国产化替代的关键配套装置包括高速低漏率真空用电控针阀和电控球阀,以及多功能超高精度通用型PID控制器,如图3所示。[align=center][color=#990000][img=03.真空控制系统国产化替代装置,690,354]https://ng1.17img.cn/bbsfiles/images/2022/09/202209161033165839_1676_3221506_3.png!w690x354.jpg[/img][/color][/align][align=center][color=#990000]图3 国产化的电动针阀、电动球阀和高精度PID控制器[/color][/align]图3所示的国产化配套装置都达到了第2节中的技术指标要求,特别是高精度的工业用PID控制器更是具有优异性能,其中的24位模数转换、16位数模转换和双精度浮点运算的0.01%最小输出百分比是目前国内外工业用PID控制器的顶级指标,可实现压力、温度和流量等工艺参数的超高精度控制。[size=18px][color=#990000]五、总结[/color][/size]针对PVT法单晶生长工艺,本文提出的上下游双向控制解决方案可实现全量程范围内真空压力的快速和高精度控制,此解决方案已在众多真空技术领域内得到了应用,相应配套的电动针型阀和电动球形阀具有国外产品近似的技术指标,工业用超高精度PID控制器更是具有优异的性能。这些配套装置结合各种真空压力传感器和双向控制方法可实现真空压力的高精度控制。[align=center]~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~[/align]

[align=center][color=#990000][img=光谱仪压强控制,690,398]https://ng1.17img.cn/bbsfiles/images/2021/07/202107030808077473_8105_3384_3.png!w690x398.jpg[/img][/color][/align][color=#990000]摘要:光谱测量和光谱仪是检测监测中的重要技术手段,为了得到满意的测量精度,光谱仪要求配套高精度的压强和温度传感器、执行机构和PID控制器,并需具有适用范围广、精度高、易集成和成本低的特点。本文将针对光谱仪压强和温度控制的特点,结合上海依阳公司的创新性产品,给出高精度和高性价比的光谱测量和光谱仪温压测控方案。[/color][align=center]~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~[/align][size=18px][color=#990000]1. 问题的提出[/color][/size] 光谱测量作为定性、定量的科学分析方法,以其测量精度高、响应速度快的优势成为各种检测监测研究中的重要技术手段,但在实际应用中样品气体的压强和温度变化会对测量结果产生严重的影响,以下是光谱测量中的温压控制方面国内外所做的一些研究工作以及所表现出来的影响特征:[color=#990000](1)压强控制范围[/color] 不同的光谱测量和光谱仪对压强控制范围有着各自不同的要求,如使用气体吸收池的红外光谱仪,吸收峰的强度可以通过调整试样气体的压强(或压力)来达到,一般压强范围为0.5~60kPa。在采用可调谐二极管激光吸收光谱(TDLAS)技术测量大气中二氧化碳浓度时,就需要6~101kPa范围内的稳定压强。在X射线光谱分析仪检测器内压强的精确控制中,要使得工作气体的密度稳定来保证检测器的测量精度,一般压强控制在一个大气压附近或者更高,而激光诱导击穿光谱仪的工作压强最大可达275kPa。由此可见,光谱仪内工作气体的压强控制范围比较宽泛,一般在0.1~300kPa范围内,这基本覆盖了从真空负压到3倍大气压的4个数量级的压强范围。[color=#990000](2)压强控制精度[/color] 在光谱测试中,观察到的谱线强度与真实气体浓度之间的关系取决于气体样品的压强,所以压强控制精度直接决定了光谱测量精度。如美国Picarro公司的光谱分析仪中的压强控制精度±0.0005大气压(波动率±0.05%@1大气压)。文献[1]报道了设定压强为6.67kPa时对吸收池进行控制,经过连续四小时控制,压强波动为±3.2Pa,波动率为±0.047%。文献[2]报道了样品池内气体压强同样被控制在6.67kPa时压强长期波动幅度为7Pa,波动率为±0.047%。文献[3]报道了激光红外多通池压强控制系统的稳定性测量,目标压强设定为60Torr,在150~200s时间内最大波动为±0.04Torr,波动率为±0.067%。文献[4]专门报道了光谱测量仪器的高精度温压控制系统的设计研究,目标压强值为18.665kPa,42小时的恒压控制,最大偏差为5.33Pa,波动率为±0.014%。文献[5]介绍了X射线光谱仪中探测器的恒压控制结果,在工作气体恒压在940hPa过程中,波动小于±2hPa,波动率为±2%。文献[6]介绍了X射线光电光谱仪在0.05~30mbar压强范围内的恒压控制技术,在设定值为0.1mbar时,恒定精度可达±0.001mbar,波动率为±1%。[color=#990000](3)温度控制精度[/color] 在光谱测试中,谱线强度与真实气体浓度之间的关系还取决于气体样品的温度稳定性,而且温度的稳定性同时也会影响压强的稳定性。文献[2]报道了样品池内气体温度控制在室温(24℃)时,温度短期波动为±0.01℃,长期温漂为±0.025℃,波动率为±0.1%。文献[4]报道的光谱测量仪器的高精度温度控制系统中,温度控制在45℃,42小时内的温度波动为±0.0015℃,波动率小于±0.004%。 综上所述,由于样品气体的压强和温度变化是影响测量结果的主要因素,所以在光谱测量以及各种光谱仪中,对样品气体的压强和温度调节及控制有以下几方面的要求: (1)压强控制范围非常宽泛(0.1~300kPa),但相应的测量和控制精度则要求很高,这就对压强测量传感器、控制阀、真空泵和相应的控制器提出了很高的要求,并且这闭环控制系统中的四个组件必须相互匹配,否则很难得到满意的结果。 (2)同样,在温度的高精度控制过程中,也应选择合适的温度传感器、加热装置、电源和控制器,并在温度闭环控制系统中四者也必须相互匹配。 (3)在压强和温度这两个闭环控制系统中,都会用到高精度控制器,为了降低实验成本和光谱仪造价,希望能用一个具有2路同时PID自动控制功能的高精度控制器。 (4)针对不同的光谱测量和光谱仪,其测试结构并不相同,这就要求温压控制系统中的各个部件具有独立性,由此有利于测试装置和光谱仪结构和合理布局和集成。 总之,为了得到光谱测量的满意精度,要求配套高精度的压强和温度传感器、执行机构和PID控制器,并具有适用范围广、精度高、易集成和成本低的特点。本文将针对这些特点,结合上海依阳公司的创新性产品,给出高精度和高性价比的光谱测量和光谱仪温压测控方案。[color=#990000][size=18px]2. 光谱仪压强和温度一体化测控方案[/size]2.1. 控制模式设计(1)压强控制模式[/color] 针对光谱仪上述的压强测控范围(0.1~300kPa),最佳方案是针对具体使用的压强范围选择相应的测控模式,如图2-1所示,针对低压范围建议采用上游控制模式,针对高压范围建议采用下游测控模式,也可以采用上下游同时控制的双向控制模式。[align=center][color=#990000][img=光谱仪压强控制,690,217]https://ng1.17img.cn/bbsfiles/images/2021/07/202107030808325845_3021_3384_3.png!w690x217.jpg[/img][/color][/align][color=#990000][/color][align=center]图2-1 压强控制的三种模式[/align] 针对低压采用上游控制模式,可以重复发挥真空泵的抽速,使得真空腔体内的压强可以快速准确的实现恒定控制。针对高压(如1个大气压左右)采用下游控制模式,可以有效控制真空泵的抽速,使得真空腔体内的压强可以快速准确的实现恒定控制,同时还避免了进气口处的样品气体和其他工作气体的流量太大。 如果对进气流量和腔体压强有严格规定并都需要准确控制,则需要采用双向控制模式,双向控制模式可以在某一恒定压强下控制不同的进气流量,但双向控制模式需要控制器具有双向控制功能,这对控制器提出了更高的能力要求。以上三种控制模式的特点更详细介绍,请参考文献[7]。[color=#990000](2)温度控制模式[/color] 同样,温度测控模式也要根据不同的温度范围和控温精度要求进行选择,如在室温附近且控温精度较高的情况下,则需要具有加热和制冷功能的双向控制模式,只有这种模式才能保证足够高的控温精度。如果在高温范围内,也建议采用双向控制方式,即以加热为主同时辅助一定的冷却补偿,以提高控温精度和快速的温度稳定。[color=#990000]2.2. 传感器的选配[/color] 传感器的精度是保证压强和温度测控准确的关键,因此传感器的选择尤为重要。 对于上述范围的压强控制,强烈建议采用目前精度最高的薄膜电容真空计[8],这种真空计的测量精度可以达到其读数的0.2%,全量程内具有很好的线性度,非常便于连接控制器进行线性控制,并具有很高的分辨率和很小的温漂。在实际选型中,需要根据不同的压强范围选择合适量程的真空计,如对于上述0.1~300kPa的压强范围,可以选择2Torr和1000Torr两种规格的真空计,由此对相应压强量程实现准确的覆盖。 对于温度控制而言,当温度不高的范围内,强烈建议测量精度最高的热敏电阻温度传感器,较高温度时也建议采用高温型的热敏电阻或铂电阻温度传感器。如果加热温度超过了热敏电阻和铂电阻传感器的使用范围,则建议采用热电偶型温度传感器。这些温度传感器在使用前都需要进行计量校准。[color=#990000]2.3. 执行机构的选配[/color] 压强控制执行机构是决定能否实现高稳定性恒定控制的关键。如图2-2所示,强烈建议采用线性度和磁滞小的步进电机驱动的电动针阀,不建议采用磁滞和控制误差都较大的比例电磁阀。电动针阀可以布置在进气口和出气口处,也可以根据上游或下游控制模式的选择布置一个电动针阀。如果光谱仪的真空腔体庞大,电动针阀就需要更换为口径和流速更大的电控阀门,以便更快的实现压强恒定控制。详细指标可参见文献[8,9]。[align=center][color=#990000][img=电动针阀和电动调节阀,690,369]https://ng1.17img.cn/bbsfiles/images/2021/07/202107030808519287_4900_3384_3.png!w690x369.jpg[/img][/color][/align][color=#990000][/color][align=center]图2-2 小流量电动针阀和大流量电动阀门[/align] 温度控制的执行机构建议采用具有帕尔贴效应的半导体热电片,这种热电片具有加热制冷双向工作模式,配合高精度的热敏电阻和控制器可以实现超高精度的温度控制,非常适合光谱仪小工作腔室的控温。 如果光谱仪工作腔室较大且温度在300℃以下,建议采用具有加热制冷功能的外排式循环浴进行加热,这种循环浴同样具有加热制冷功能,可达到较高的控温精度。 如果光谱仪工作在更高温度,则建议采用电阻丝或光加热方式,同时配备一定的通风冷却装置以提高加热的热响应速度,从而保证温控的稳定性和速度。[color=#990000]2.4. 控制器的选配[/color] 控制器是实现高精度和高稳定性压强和温度测控的最终保障。在压强控制设计中,控制器需要根据所选真空计和执行机构进行选配,选配的详细介绍可参见文献[10]。根据文献的计算可得认为,如果要保证压强测控的精度,必须采用至少16位以上的A/D模数采集器。同样,温度测控的精度保证也是由模数采集器的位数决定。因此,对于光谱仪中压强和温度的控制,建议采用了目前上海依阳实业有限公司开发的精度和性价比最高,并结合了PID参数控制功能的24位A/D采集的控制器,详细内容可参见文献[11]。 按照上述的选型,最终压强和温度的测控方案如图2-3所示。[align=center][color=#990000][img=光谱仪压强和温度控制框图,690,291]https://ng1.17img.cn/bbsfiles/images/2021/07/202107030809355503_6326_3384_3.png!w690x291.jpg[/img][/color][/align][color=#990000][/color][align=center]图2-3 光谱仪压强和温度测控方案示意图[/align] 特别需要指出的是,上述的压强和温度控制,基本都采用了双向控制模式,而我们所开发的这款高精度控制器恰恰具有这个功能。另外,在光谱仪实际应用中,压强和温度需要同时进行控制,可以采用两台控制器分别进行控制,但相应的光谱仪整体体积增大、操作变得繁复并增加成本。而目前所建议使用的高精度控制器则是一台双通道的PID控制器,两个通道可以独立同时进行不同PID参数的控制和PID参数自整定,并且每个通道都具有双向控制功能,这有效简化了控制器并降低了仪器尺寸和成本。[size=18px][color=#990000]3. 总结[/color][/size] 综上所述,通过对光谱测量和光谱仪的压强和温度测控要求的分析,确定了详细的温压测控技术方案,并详细介绍了方案确定的依据以及相应所选部件的技术参数指标。 整个技术方案完全能满足光谱测量和光谱仪对压强和温度测控的要求,并具有测控精度高、功能强大、适用范围广、易集成和成本低的特点。除了薄膜电容真空计为进口产品之外(也可选国产真空计),方案中的所有选择部件和仪表都为国产制造。[color=#990000]4. 参考文献[/color](1)牛明生, 王贵师. 基于可调谐二极管激光技术利用小波去噪在2.008μm波段对δ13CO2的研究[J]. 物理学报, 2017(02):136-144.(2)孙明国, 马宏亮, 刘强,等. 参数主动控制的痕量气体实时在线测量系统[J]. 光学学报, 2018, v.38;No.434(05):344-350.(3)许绘香, 孔国利. 采用Ziegler-Nichols-PID算法的激光红外多通池压强控制系统研制[J]. 红外与激光工程, 2020(9).(4)周心禺, 董洋, 王坤阳,等. 用于光谱测量仪器的高精度温压控制系统设计[J]. 量子电子学报, 2020, v.37 No.194(03):14-20.(5)Elvira V H , Roteta M , A Fernández-Sotillo, et al. Design and optimization of a proportional counter for the absolute determination of low-energy x-ray emission rates[J]. Review of Scientific Instruments, 2020, 91(10):103304.(6)Kerherve G , Regoutz A , D Bentley, et al. Laboratory-based high pressure X-ray photoelectron spectroscopy: A novel and flexible reaction cell approach[J]. Review of Scientific Instruments, 2017, 88(3):033102.(7)上海依阳实业有限公司,“真空度(气压)控制:上游模式和下游模式的特点以及新技术“,知乎:https://zhuanlan.zhihu.com/p/341861844.(8)上海依阳实业有限公司,“真空压力控制装置:电动针阀(电控针型阀)”:http://www.eyoungindustry.com/2021/621/29.html.(9)上海依阳实业有限公司,“微波等离子体化学[url=https://insevent.instrument.com.cn/t/Mp]气相[/url]沉积(MPCVD)系统中真空压力控制装置的国产化替代”,知乎:https://zhuanlan.zhihu.com/p/377943078.(10)上海依阳实业有限公司,“彻底讲清如何在真空系统中实现压力和真空度的准确测量和控制”,知乎:https://zhuanlan.zhihu.com/p/343942420.(11)上海依阳实业有限公司,“高精度可编程真空压力控制器(压强控制器和温度控制器)”:http://www.eyoungindustry.com/2021/618/28.html.[align=center]=======================================================================[/align][align=center] [img=,690,345]https://ng1.17img.cn/bbsfiles/images/2021/07/202107030804374064_8626_3384_3.jpg!w690x345.jpg[/img][/align]
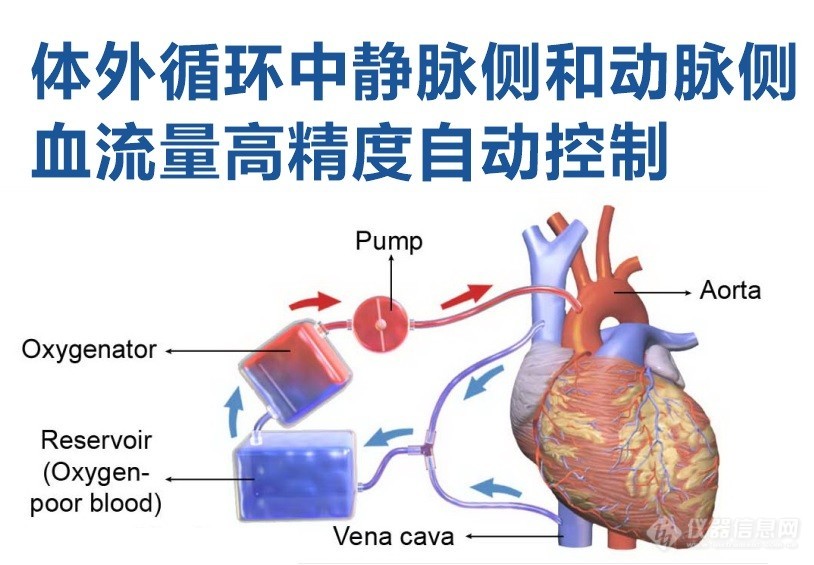
[align=center][size=16px][img=体外循环术中灌注流量的高精度自动控制,600,415]https://ng1.17img.cn/bbsfiles/images/2023/10/202310271116037597_5912_3221506_3.jpg!w690x478.jpg[/img][/size][/align][size=16px][color=#990000][b]摘要:在目前的体外循环手术过程中,需要灌注师快速而精确地操作使得血液流速调节到期望的目标值。基于国外文献报道的血流量自动控制方法和装置,本文提出了技术改进且国产化解决方案。通过本解决方案中增加的国产系列电控夹管阀、电控针阀和具有远程设定值功能的超高精度PID控制器,可以使得体外循环过程中的静脉和动脉血流量控制真正实现高精度的自动化控制,在满足临床应用和研究需求的同时,可降低灌注师的操作难度和医疗事故。[/b][/color][/size][align=center][size=16px][color=#990000][b]~~~~~~~~~~~~~~~~~[/b][/color][/size][/align][size=18px][color=#990000][b]1. 问题的提出[/b][/color][/size][size=16px] 体外循环(CPB)设备在心脏手术期间临时替代心肺功能,以维持体循环。心脏体外循环手术时,需要将手术病人静脉血从体内引出,通过体外循环机氧合后回输至体内动脉管道、静脉回流管、左心房引流管、心内吸引管、普通吸引管等管道,并维持血流量、静脉储库水平、氧气浓度、氧气血流量和血液温度,其中对血液流速的控制要求非常高,稍有错误就会导致循环障碍和大量空气栓塞,从而导致严重的医疗事故。[/size][size=16px] 在CPB具体操作过程中,需要灌注师快速而精确地操作三个装置(静脉侧阻隔器、动脉侧阻隔器和离心泵)来将血液流速调节到期望的目标值,不正确的操作会导致气栓并改变静脉储血水平而导致意外的血压波动,从而将患者置于危险之中。因此,需要开发一种有助于自动调节血液流速的装置以提高自动化控制水平和降低灌注师工作强度,为此文献[1]提出了一种体外循环过程中动脉侧血流量的自动控制方法和控制装置,其结构如图1所示。[/size][align=center][size=16px][color=#990000][b][img=体外循环血流量自动控制结构示意图,650,351]https://ng1.17img.cn/bbsfiles/images/2023/10/202310271117325921_65_3221506_3.jpg!w584x316.jpg[/img][/b][/color][/size][/align][align=center][size=16px][color=#990000][b]图1 体外循环血流量自动控制装置结构示意图[/b][/color][/size][/align][size=16px] 尽管文献[1]提出了一种体外循环过程中动脉侧血流量的自动控制方法和相应装置,但距离真正的临床应用还有一定差距,这些差距主要体现在以下几个方面:[/size][size=16px] (1)尽管文献[1]给出了静脉侧和动脉侧血流量调节用的手动和自动阻隔器的具体型号,但我们并未在阻隔器厂家官网上查到相应型号阻隔器的具体产品和相应技术参数。因此,为了真正实现临床应用还需进一步明确阻隔器产品,甚至是国产化替代。[/size][size=16px] (2)动脉侧血流量自动控制的目的是要自动调节动脉侧血流量的变化始终要与静脉侧血流量的变化保持快速同步和相同,但文献[1]给出的控制模型和控制策略过于复杂,较难真正的工程化实现。[/size][size=16px] 针对文献[1]技术方案存在的上述缺陷,本文提出了可真正实现临床应用的解决方案,能很好的解决上述问题,并可完全采用国产化相关产品予以实现。[/size][size=18px][color=#990000][b]2. 解决方案[/b][/color][/size][size=16px] 基于文献[1]所述的动脉侧血流量自动控制技术方案,我们进行了改进,并进一步明确和细化了相关所用部件,改进后的自动控制装置结构如图2所示。[/size][align=center][size=16px][color=#990000][b][img=改进后的体外循环血流量自动控制结构示意图,650,311]https://ng1.17img.cn/bbsfiles/images/2023/10/202310271118025749_1493_3221506_3.jpg!w690x331.jpg[/img][/b][/color][/size][/align][align=center][size=16px][color=#990000][b]图2 改进后的体外循环血流量自动控制结构示意图[/b][/color][/size][/align][size=16px] 解决方案的改进内容之一是采用国产的电控夹管阀来代替文献[1]中所用的阻隔器,这种电控夹管阀可以通过0~10V的直流电压信号来改变加持力以调节管路导通口径的大小,从而实现对管路中的流体流量进行调节。由此可见,这种电控夹管阀可以很方便的被用来进行静脉侧和动脉侧血流量的手动或自动调节。[/size][size=16px] 尽管电控夹管阀和自动阻隔器可以用来对体外循环系统中的血流量进行调节,但存在的问题是会带来的非线性,这种非线性会对自动控制精度带来严重影响,这也是文献[1]控制模型非常复杂的主要原因。文献[2]对这种非线性进行了研究和描述,发现操作值与开度之间呈指数关系。[/size][size=16px] 为了解决管夹形式所带来的非线性问题,解决方案提出的改进内容之二是采用NCNV系列的电控针阀。NCNV系列电控针阀具有非常高的线性度,且具有快速的响应速度以及不同的孔径尺寸,常用于气体和液体介质的真空、压力和流量的精密调节。尽管采用电控针阀可以很好的解决夹管阀非线性所带来的控制精度问题,但电控针阀存在的重要问题是针阀需要接触所调节的流体介质,不能像夹管阀那样与流体介质不发生接触。[/size][size=16px] 为真正使动脉侧血流量能快速与静脉侧血流量保持同步和相同,本解决方案提出的重大改进是采用具有远程设定点功能的VPC2021系列高精度PID控制器,控制器的具体特性和功能如下:[/size][size=16px] (1)具有两个输入信号接收通道,其中主输入通道接收动脉侧流量计信号,并由主控输出通道输出控制信号对动脉侧电控夹管阀/针阀进行调节;而辅助输入通道接收静脉侧流量计信号,此接收到的静脉侧流量信号则作为动脉侧流量控制的设定值。通过这种辅助输入通道的这种远程设定值功能,可使得动脉侧的流量控制始终以静脉侧的流量为跟踪控制目标。[/size][size=16px] (2)控制器具有超高的测量精度和控制精度,其中24位AD、16位DA和0.01%最小输出百分比,并采用了无超调的PID控制模式,这非常适用于体外循环装置中的高精度血液流量控制。[/size][size=16px] (3)控制器具有RS485通讯接口,并执行标准的MODBUS协议。控制器自带测控软件,在计算机上运行软件可实现控制器参数设置、驱动运行、过程参数的采集、曲线显示和存储,无需再进行程序编写就可组成软硬件控制系统用于临床应用和研究。[/size][size=18px][color=#990000][b]3. 总结[/b][/color][/size][size=16px] 通过本解决方案中增加的国产系列电控夹管阀、电控针阀和具有远程设定值功能超高精度PID控制器,可以使得体外循环过程中的静脉和动脉血流量控制真正实现高精度的自动化控制,在满足临床应用和研究需求的同时,降低医疗事故和灌注师的操作难度。[/size][size=18px][color=#990000][b]4. 参考文献[/b][/color][/size][size=16px][1] Takahashi H, Kinoshita T, Soh Z, et al. Automatic control of blood flow rate on the arterial-line side during cardiopulmonary bypass[C]//2021 43rd Annual International Conference of the IEEE Engineering in Medicine & Biology Society (EMBC). IEEE, 2021: 5011-5014.[/size][size=16px][2] Takahashi H, Soh Z, Tsuji T. Steady-state model of pressure-flow characteristics modulated by occluders in cardiopulmonary bypass systems[J]. IEEE Access, 2020, 8: 220962-220972.[/size][align=center][size=16px][color=#990000][b][/b][/color][/size][/align][align=center][b][color=#990000]~~~~~~~~~~~~~~~[/color][/b][/align][size=16px][/size]
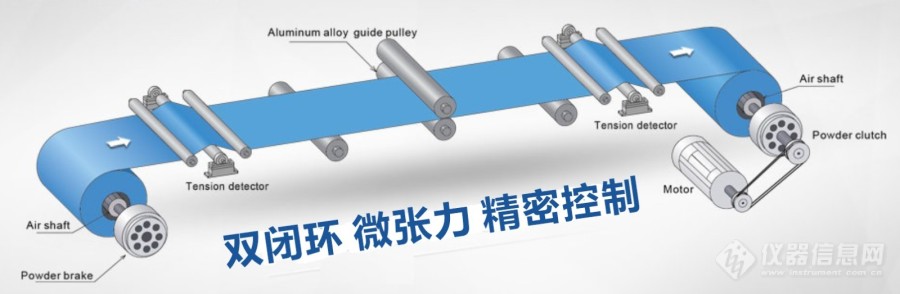
[size=16px][color=#339999][b]摘要:采用当前的各种涂布机很难适用气体扩散层这类脆性材料的涂布工艺,需要控制精度更高的微张力控制系统。为此本文基于串级控制原理,提出了采用双闭环PID控制模式和超高精度PID张力控制器的解决方案,一方面形成浮动摆棍闭环和主动辊闭环构成的串级控制回路,另一方面是采用目前测控精度最高的工业用PID控制器,结合相应配套的高精度传感器和执行器,可真正实现微张力的精密控制。[/b][/color][/size][align=center] [img=微张力精密控制,690,225]https://ng1.17img.cn/bbsfiles/images/2023/07/202307261628010805_2785_3221506_3.jpg!w690x225.jpg[/img][/align][size=16px] [/size][size=18px][color=#339999][b]1. 问题的提出[/b][/color][/size][size=16px] 气体扩散层(GDL)在燃料电池中起到支撑催化层、收集电流、传导气体和排出反应产物水的重要作用,常用于质子交换膜燃料电池,在具体生产工艺中需要在GDL材料表面定量涂布一层特定功能涂料。由于GDL基体层材料较脆,涂布工艺过程中易造成基体层材料断裂或撕裂,转弯处易折断,在高温状态下材料比常温下更脆弱,一般要求涂布过程中控制张力设定在5~10N很窄的一个范围内,且还需要在此微张力范围内具有较高的控制精度。[/size][size=16px] 传统涂布设备,浮动摆辊均为气缸驱动,直线电位器反馈摆辊位置。存在以下问题:[/size][size=16px] (1)无法精确控制摆辊位置。[/size][size=16px] (2)气缸行程只有一个方向,需要料膜的张力平衡气缸推力,易造成GDL脆性材料拉伸。[/size][size=16px] (3)摆辊瞬间偏移至一端时,料膜张力瞬间增大或减小,极易造成GDL脆性材料的撕裂甚至断裂。[/size][size=16px] (4)张力控制器中的模数转换AD精度和数模转换DA精度较低,最小输出百分比也只能达到0.1%,无法提供更高精度的测量和控制。[/size][size=16px] 由此可见,为实现GDL脆性材料的微张力控制,实现具有精度高、张力小、控制稳的伺服电机驱动的浮动摆辊微张力控制是氢能材料制备的关键技术,为此本文提出了相应的解决方案。[/size][size=18px][color=#339999][b]2. 解决方案[/b][/color][/size][size=16px] 为实现涂布工艺中的微张力高精度控制,本文提出的解决方案包含以下两方面的内容:[/size][size=16px] (1)采用双闭环PID控制形式调节料膜张力,即对浮动摆棍和主动辊进行独立的PID控制。[/size][size=16px] (2)采用超高精度的双通道PID控制器,每个通道都具有24位AD、16位DA和0.01%最小输出百分比。[/size][size=16px] 解决方案所涉及的微张力控制系统结构如图1所示。[/size][align=center][size=16px][color=#339999][b][img=双闭环微张力控制系统结构示意图,500,200]https://ng1.17img.cn/bbsfiles/images/2023/07/202307261628351448_1980_3221506_3.jpg!w690x277.jpg[/img][/b][/color][/size][/align][align=center][size=16px][color=#339999][b]图1 双闭环微张力控制系统结构示意图[/b][/color][/size][/align][size=16px] 在图1所示的双闭环控制系统中,浮动摆辊PID闭环控制的具体过程是根据工艺要求,给控制器输入张力值,控制器根据张力传感器信号与设定张力值之差进行快速PID计算后输出控制信号,此控制信号控制浮动摆辊伺服驱动器和伺服电机动作,从而使浮动摆棍产生偏移使得料膜张力快速达到设定值。[/size][size=16px] 浮动摆辊的PID闭环控制过程主要是通过浮动摆辊偏移来调节料膜张力,主动辊速度仍为主机速度,并未参与调节。当浮动摆辊伺服电机持续动作调节料膜张力时,浮动摆辊偏差会导致累积,最终达到浮动摆辊位置报警值。因此仅由浮动摆辊伺服电机调节料膜张力不能完全解决张力不稳、精度不高的问题,为此增加主动辊PID闭环控制实现张力的精准控制。[/size][size=16px] 第二路主动辊PID闭环控制的具体过程是在浮动摆辊PID闭环控制实现调节后,由于浮动摆辊偏离中位,位移传感器跟随浮动摆辊偏移产生对应的偏移电压信号并输入给控制器,控制器根据此偏移电压信号与0V值的正负偏差进行快速PID计算后输出控制信号,此信号控制主动辊伺服驱动和主动辊伺服电机来改变主动辊速度,使得浮动摆棍回到中位,最终实现GDL脆性材料的微张力精准控制。[/size][size=18px][color=#339999][b]3. 总结[/b][/color][/size][size=16px] 综上所述,通过上述解决方案,可很好的解决微张力的精密控制问题,具体优点如下:[/size][size=16px] (1)解决方案所采用的双闭环控制结构,实际上是一个非常典型的串级控制结构,因此充分利用了串级控制结构的优势,更利于实现高精度张力的控制。[/size][size=16px] (2)制约微张力精密控制的另一个主要因素是控制器的精度普遍不高,采用PLC很难达到超高的采集和控制精度。因此,本解决方案中采用了超高精度的双通道PID控制,既使用了串级控制功能,又实现了超高精度的PID控制。[/size][size=16px] 当然,传感器和执行器精度也是制约微张力精密控制的因素,为了真正实现微张力的精密控制,还需在使用串级控制和超高精度PID控制器的基础上,配备相应高精度的传感器和执行器。[/size][size=16px][/size][size=16px][/size][align=center][b][color=#339999]~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~[/color][/b][/align][align=center][b][color=#339999][/color][/b][/align][align=center][b][color=#339999][/color][/b][/align][align=center][b][color=#339999][/color][/b][/align][align=center][b][color=#339999][/color][/b][/align]
电调制非分光红外原理的气体分析仪,最高精度能到多少?响应时间一般多长?
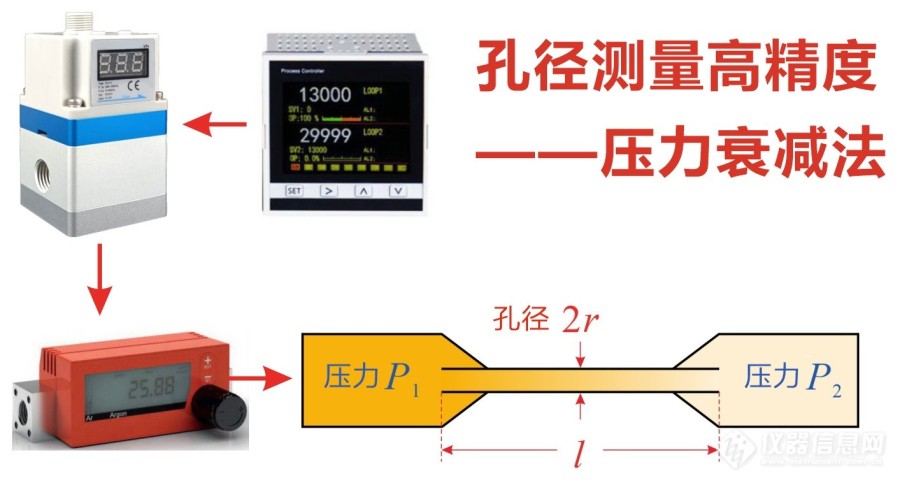
[b][color=#3366ff]摘要:针对现有压力衰减法孔径测量中存在的基本概念不清和实施方法不明确等问题,本文详细介绍了压力衰减法的孔径测量基本原理,并重点介绍压差法测量中的高精度压力控制方法,为各种微小孔径和等效孔径的准确测量提供切实可行的解决方案。[/color][/b][align=center][img=压力衰减法孔径测量,550,294]https://ng1.17img.cn/bbsfiles/images/2022/12/202212230914562217_9430_3221506_3.jpg!w690x370.jpg[/img][/align][b][size=18px][color=#3366ff]1. 问题的提出[/color][/size][/b] 在工业生产和实验室研究中存在着大量管件内部孔径的测量需求,而且还要求具有较高的测量精度,常见的需要精密测量的几类孔径有: (1)毛细管内径。 (2)鲁尔接头或其他连接器母接头孔径。 (3)各种喷灯气孔孔径。 (4)栓环缝通道等效孔径。 (5)药用玻璃瓶或药品包装系统漏孔孔径。 通道孔径主要分为直接测量方法和间接测量方法。直接测量主要是通过精密的尺规等工具进行测量,如游标卡尺、圆锥尺、针规和塞规等,但直接测量方法并不适应于细长管和针栓环缝通道等的孔径或等效通径的测量。 间接测量法主要有光学法和流体标定法。光学法一般是利用像素为基本单位对各种形状的孔进行测量,适用于元件表面孔和裂纹的测量。但对于细长或者弯曲多变的孔径,光学法不适用。流体标定方法是一种基于压力衰减法的有效的等效通径标定方法,流体介质多以气体和液体为主,通过流量计和压力传感器分别测量流体流量和压力差。但在目前的压力衰减法中普遍存在以下几方面的问题: (1)在低于和高于一个标准大气压的负压和正压条件下,都可以采用压力衰减法进行孔径测量,但绝大多数文献和专利报道对此并没有明确的规定,正负压测试条件的使用显着非常随意和混乱。 (2)压力衰减法的核心是在被测孔径管道的两侧形成恒定压力差,并同时测量由此压差引起的流量变化,其中的恒定压力控制是建立试验条件和影响测量精度的最重要因素。对于精确的压力控制在各种文献和专利报道中很少看到,大多报道只是给出一个不完整的压力衰减法测试框图,对精确的压力控制以生成高精度的恒定压差还未见报道。 针对上述现有压力衰减法孔径测量中存在的问题,本文将详细介绍压力衰减法孔径测量的基本原理,重点介绍压差法测量中的高精度压力控制方法,为微小孔径和等效孔径的准确测量提供切实可行的解决方案。[b][size=18px][color=#3366ff]2. 压力衰减法基本原理——泊肃叶定律[/color][/size][/b] 在恒定压差条件下,在粗细均匀的水平刚性圆管中作层流流动的黏性流体,其体积流量满足如图1所示的泊肃叶(Poiseuille)公式。[align=center][img=泊肃叶定律,600,311]https://ng1.17img.cn/bbsfiles/images/2022/12/202212230917419388_2550_3221506_3.jpg!w690x358.jpg[/img][/align][align=center][color=#3366ff][b]图1 流体介质的泊肃叶定律[/b][/color][/align] 从泊肃叶公式中可以看出,体积流量与管孔半径的四次方成正比,孔径微小的变化都会对流量产生明显的影响。这就是压力衰减法孔径测量的依据,孔径的微小改变都会引起流量的显著变化,因此压力衰减法在孔径测量中具有很高的灵敏度,但前提是一要准确控制管道两端的压力,二是要准确测量体积流量。[b][size=18px][color=#3366ff]3. 孔径测量解决方案[/color][/size][/b] 依据泊肃叶定律,孔径测量的关键是实现准确的压力控制和流量测量。为此,本文针对高精度孔径测量提出的解决方案如图2所示。[align=center][b][color=#3366ff][img=压力衰减法孔径测量装置结构示意图,600,572]https://ng1.17img.cn/bbsfiles/images/2022/12/202212230918265466_3029_3221506_3.jpg!w690x658.jpg[/img][/color][/b][/align][align=center][b][color=#3366ff]图2 压力衰减法孔径测量装置结构示意图[/color][/b][/align] 如图2所示,被测孔径管件安装在两个压力腔室之间,整个装置的目的是精确控制这两个腔室的压力以形成稳定的压力差,在压力差稳定的装置下测量流进和留出两个腔室的气体流量,从而可计算得到被测孔径大小。 此孔径测量装置涉及以下几方面的主要内容: (1)此孔径测量装置采用了正压压力控制方案,这主要是因为正压控制同样可以达到很高的精度,而且,相对于负压真空环境下的测量和控制造价较低。正压控制过程中,采用纯净的高压气瓶和减压阀提供稳定的高压气源,高压气源同时供给两个压力控制阀以实现不同的正压压力控制。 (2)由于要测量进出两个腔室的气体流量,需要在两个腔室的进气口和出气口处分别安装气体质量流量计进行流量测量,因此压力控制阀无法直接对两个腔室的压力直接控制。为此,解决方案采用了串级控制方式,即在两个腔室上分别增加压力传感器,通过双通道PID压力控制器采集压力传感器信号,并两个通道分别设定不同的压力值,由此来驱动压力控制阀进行双回路的压力控制,由此实现两个腔室内的压力准确稳定在设定值上。 (3)压力控制阀是一个自带PID控制板和压力传感器的闭环压力控制装置,通过接收双通道PID压力控制器的控制信号,可以使压力控制阀出口处的压力准确恒定。压力控制阀自带泄压放气孔,由此两个压力控制阀组成的压差控制回路可使气体单向流过被测孔径管件。 (4)此解决方案中的孔径测量装置是一个对称装置,这种对称结构设计的目的是可以对被测孔径管件进行双向测试,这也是一种提高孔径测量精度的途径之一。 (5)压力控制器采用的是双通道高精度PID控制器,AD精度为24位,DA精度为16位,两个通道独立运行,可满足各种孔径精度测量中的压力控制需要。 (6)整个孔径测量装置的测量精度,除了受压力控制器精度影响之外,还会受到压力控制阀、压力传感器和气体质量流量计精度的影响,因此要针对不同的孔径测量精度要求选择合适精度的部件。 (7)由于此孔径测量装置是直接控制两个腔室的压力,所以在室温下运行时腔室温度的波动对压力变化没有影响,腔室压力控制自动会消除掉温度影响而保持腔室气压恒定。 (8)为了实现数据的自动采集和计算孔径测量结果,双通道压力控制器和两个气体质量流量计需要与计算机通讯连接(图2中并未绘出)。由此,通过计算机可设定控制压力,采集压力和流量变化曲线以监控压力和流量是否稳定,当达到稳态状态后可通过压力和流量采集数据并依据泊肃叶公式计算得到孔径测量值。[b][size=18px][color=#3366ff]4. 总结[/color][/size][/b] 综上所述,本文所提出的基于压力衰减法的孔径测量解决方案,具有很高的测量精度和广泛的适用性,整个测量过程自动运行,关键是可以满足多种形式的微小孔径测量,在替代传统塞规的前提下,是一种高精度的无损测量解决方案。特别是采用气体作为流体介质,非常适合微小尺寸(如毛细管等)和漏孔的等效口径测量。[align=center]~~~~~~~~~~~~~~~~~~~~~[/align]
高精度半导体恒温箱是半导体行业常用的设备之一,作为比较常用的设备,其保养也是相当重要,那么无锡冠亚高精度半导体恒温箱的保养有哪些要点呢?怎么进行保养比较好呢? 高精度半导体恒温箱由蒸发器出来的状态为气体的冷媒;经收缩机绝热收缩后期,变成高温高压状态,被收缩后的气体冷媒,在冷凝器中,等压冷却冷凝,经冷凝后转变成液态冷媒,再经节流阀膨胀到低压,变成气液混合物。此中低温低压下的液态冷媒,在蒸发器中摄取被冷物资的热量,从头变成气态冷媒,气态冷媒经管道从头进来收缩机,开头新的轮回,这便是高精度半导体恒温箱轮回的四个过程。 高精度半导体恒温箱密封部位调养,鉴于装配式高精度半导体恒温箱是由若干块保温板拼而成,因而板之间存在必需的间隙,施工中这类间隙会用密封胶密封,为了避免空气和水份进来,因而在利用中对一些密封无效的部位实时修理. 高精度半导体恒温箱地面调养,通常小型装配式高精度半导体恒温箱的地面利用保温板,利用高精度半导体恒温箱时应为了避免地面存有大量的冰和水,假如有冰,处理时切不可利用硬物敲打,损害地面。 高精度半导体恒温箱装配完结或长久停用后再次利用,降温的速率要适宜:每日操纵在8-10℃为宜,在0℃时应保留一段时间。 高精度半导体恒温箱库板调养,留意利用中应留意硬物对库体的碰撞和刮划,鉴于不妨变成库板的凹下和锈蚀,严重的会使库体片面保温功能下降。 高精度半导体恒温箱的保养是离不开我们操作人员的细心操作,所以,我们在日常操作中也要善待我们的设备,不要太过粗暴。
[color=#333333]近年来,环境污染一直都是大家关注的话题,环境污染的严重化导致了空气净化等相关市场的快速发展,而且到目前为止净化产品市场已逐渐趋于饱和状态,但是对于产品性能依然是用户最主要的选择,而在性能方面,[/color][url=http://www.isweek.cn/category_5.html]传感器[/url][color=#333333]则占据了核心地位。环保需求日益迫切,气体传感器的环境监测成为环保的迫切需求,加之传感器技术本身的不断发展,正推动环境监测有望成为物联网垂直领域中率先落地的亮点应用之一。气体传感器除了监测环境以外还广泛应用于工业、生活的各个领域,如石油、化工、钢铁、冶金、矿山、市政、医疗、食品等诸多领域。近年来,随着互联网与物联网的高速发展,气体质量流量传感器在新兴的智能家居、可穿戴设备、智能移动终端等领域的应用突飞猛进,大幅扩展了应用空间,需求量也发生数量级的改变。[/color][color=#333333][url=http://www.isweek.cn/category_12.html]气体质量流量传感器[/url]是一种常用的流量测量仪器,主要针对于空气、氮气、氢气、天然气、过氧化氢、甲烷、丁烷、氯气等进行测量。对蒸汽、氮气、二氧化碳、氢气等测量的 气体流量计的校准要求在不断增加。由于采用这些气体进行大规模校准的设施并不多,因此采用另一种流体进行校准几乎是唯一的选择,且在许多情况下是一种合理的、可替代的选择。如果流动条件可以估算出来,那么就可以在与操作条件不同的条件下对气体流量计进行校准,估算流动条件所采用的参数通常为关于该气体流量计入口直径的雷诺数。针对空气净化监测问题工釆网推出来了专为普通气体流量监测开发的产品:[url=http://www.isweek.cn/82.html]气体质量流量传感器 - FS4000[/url]。气体质量流量传感器FS4000系列是采用世界领先的微机电系统流量传感器技术和智能电子控制MEMS技术,具有灵敏度高、零点稳定度高、全量程高稳定性、高精度、优良重复性、低功耗、低压损、响应时间快等特点,不仅适用于净化空气或氮气流量监控,还可用于环境采样器(如色谱分析仪器等),其中FS4003气体质量流量传感器管道内径为3mm,成本低测量范围最大到5SLPM适用于粒子计数器和各类分析仪器。而管道内径为8mm,测量范围最大到50SLPM可用于麻醉设备、洁净气体检测,如:空气采样机,气体分析仪等。另一方面采用多种模式输出RS232/RS485/模拟电压0.5V~4.5V,用户可以随意对输出信号进行获取开发,快速的响应时间10ms同时可以实时监测瞬时流量,其中最大工作压力可达5bar,能应用到许多场合,机身质量也只有70g,方便用户做进一步开发利用。关于气体传感器的发展也将和其它传感器一样,[url=http://www.isweek.cn/category_11.html]气体传感器[/url]的发展的趋势也将是微型化、智能化和多功能化。其中纳米、薄膜技术等新材料制备技术的成功应用为气体传感器实现新功能提供了条件。利用MEMS技术帮助实现传感器尺寸小型化,进而研究多气体传感器的集成以实现多功能化。而气体传感器与数字电路的集成则将成为实现智能化的必然途径。小型化智能化的气体传感器将成为激活市场的新亮点。转载本站文章请注明出处:仪器仪表应用_传感器应用_智能硬件产品 - 工采资讯 http://news.isweek.cn/?p=4605[/color]

[b][color=#339999][font='微软雅黑',sans-serif]摘要:针对红外目标模拟器的高精度可编程温度控制功能,本文介绍了实现高精度温控的温控装置,给出了温控方案。温控装置主要包括[/font]TEC[font='微软雅黑',sans-serif]半导体制冷加热模组、电源自动换向器、传感器和超高精度[/font]PID[font='微软雅黑',sans-serif]控制器。从超高精度温度控制,关键是[/font]PID[font='微软雅黑',sans-serif]控制器具有[/font]24[font='微软雅黑',sans-serif]位[/font]AD[font='微软雅黑',sans-serif]、[/font]16[font='微软雅黑',sans-serif]位[/font]DA[font='微软雅黑',sans-serif]和[/font]0.01%[font='微软雅黑',sans-serif]最小输出百分比的高性能指标,同时还具有可手动和通讯软件编程功能。[/font][/color][/b][align=center][img=常温黑体中TEC半导体可编程高精度温度控制解决方案,600,337]https://ng1.17img.cn/bbsfiles/images/2023/02/202302220435170646_2129_3221506_3.jpg!w690x388.jpg[/img][/align][align=center][color=#339999]~~~~~~~~~~~~~~~[/color][/align][b][size=18px][color=#339999]1. [font='微软雅黑',sans-serif]红外目标模拟器工作原理[/font][/color][/size][/b][font='微软雅黑',sans-serif] 红外目标模拟器([/font]Infrared Target Simulator[font='微软雅黑',sans-serif])广泛应用于红外探测器和红外热像仪整机的工艺测试和评价测试,它为被测装置提供标准的红外测试图像,用于测试关键指标,如[/font]NETD[font='微软雅黑',sans-serif](噪声等效温差)、[/font]MRTD[font='微软雅黑',sans-serif](最小可分辨温差)、[/font]MDRD[font='微软雅黑',sans-serif](最小可探测温差)、[/font]SiTF[font='微软雅黑',sans-serif](信号传递函数)等,以及整个系统的性能评估。[/font][font='微软雅黑',sans-serif][font=微软雅黑, sans-serif] [/font]红外目标模拟器的重要指标包括发射率、辐射均匀性、温度控制精度、温度稳定性和响应速度等,其中前两个指标取决于所用黑体的结构、辐射面材质和黑漆喷涂技术,其余指标则取决于温控系统的性能。红外目标模拟器一般通过单黑体或双黑体实现,但无论采用哪一种黑体结构,高精度的温控技术都是其中的技术关键,它直接关系到红外目标模拟器的性能,是实现红外系统指标测试的关键因素。红外目标模拟器的工作原理如图[/font]1[font='微软雅黑',sans-serif]所示。[/font][align=center][size=14px][b][color=#339999][img=红外目标模拟器原理示意图,500,365]https://ng1.17img.cn/bbsfiles/images/2023/02/202302220437236876_9226_3221506_3.jpg!w690x505.jpg[/img][/color][/b][/size][/align][font='微软雅黑',sans-serif][color=#339999][/color][/font][align=center][b][font='微软雅黑',sans-serif]图[/font][font=&]1 [/font][font='微软雅黑',sans-serif]红外目标模拟器工作原理示意图[/font][/b][/align][font='微软雅黑',sans-serif][font=微软雅黑, sans-serif] [/font]如图[/font]1[font='微软雅黑',sans-serif]所示,目标位于准直器反射器焦平面上。热辐射图样将由热辐射表面和目标之间的温差产生,并由准直器转换成平行光以模拟无限远的红外目标,供被测红外系统的成像探测器使用。[/font][font='微软雅黑',sans-serif][font=微软雅黑, sans-serif] [/font]温控系统由温度传感器、[/font]TEC[font='微软雅黑',sans-serif]半导体模组、散热器、风扇、[/font]PID [font='微软雅黑',sans-serif]控制器、自动电源换向器等组成。温度传感器[/font]A[font='微软雅黑',sans-serif]检测的是目标温度,温度传感器[/font]B[font='微软雅黑',sans-serif]检测的是辐射表面温度。根据目标的设定温度,控制器通过[/font]PID[font='微软雅黑',sans-serif]控制算法计算加热或制冷的控制量并驱动电源换向器工作电流的方向和大小,使得[/font]TEC[font='微软雅黑',sans-serif]半导体模组进行加热或制冷输出。[/font][b][size=18px][color=#339999]2. TEC[font='微软雅黑',sans-serif]半导体高精度温度控制标准装置[/font][/color][/size][/b][font='微软雅黑',sans-serif][font=微软雅黑, sans-serif] [/font]根据红外测试设备的检测指标,要求红外目标模拟器的工作温度范围为[/font]0~50[font='微软雅黑',sans-serif]℃,温度分辨率为[/font]0.001[font='微软雅黑',sans-serif]℃,控温精度为[/font]0.03[font='微软雅黑',sans-serif]℃。要实现此技术指标,温度控制系统需包括加热装置、温度传感器、执行器和[/font]PID[font='微软雅黑',sans-serif]控制器这几部分内容,而且需要满足相应的技术指标。为此,专门针对温控系统本文设计了相应的解决方案,具体结构如图[/font]2[font='微软雅黑',sans-serif]所示。以下为图[/font]2[font='微软雅黑',sans-serif]所示温控方案的详细描述:[/font][align=center][size=14px][b][color=#339999][img=温度控制系统方案示意图,550,559]https://ng1.17img.cn/bbsfiles/images/2023/02/202302220437516841_6377_3221506_3.jpg!w690x702.jpg[/img][/color][/b][/size][/align][font='微软雅黑',sans-serif][color=#339999][/color][/font][align=center][b][font='微软雅黑',sans-serif]图[/font][font=&]2 [/font][font='微软雅黑',sans-serif]红外目标模拟器温度控制系统方案示意图[/font][/b][/align][font='微软雅黑',sans-serif][font=微软雅黑, sans-serif] [/font]([/font]1[font='微软雅黑',sans-serif])加热方式:有很多种加热方式可供选择,如电加热、循环水加热和[/font]TEC[font='微软雅黑',sans-serif]半导体制冷加热等,但考虑到红外目标模拟器对工作温度范围和超高精度温度控制的要求,目前也只有[/font]TEC[font='微软雅黑',sans-serif]热电半导体制冷加热方式比较适用。[/font]TEC[font='微软雅黑',sans-serif]用于红外目标模拟器的温度控制除能满足温度范围之外,与其他加热方式相比具有更高的控温精度、更快的冷热变化控制速度、结构简单以及造价低的突出特点。[/font][font='微软雅黑',sans-serif][font=微软雅黑, sans-serif] [/font]([/font]2[font='微软雅黑',sans-serif])执行机构:为了实现[/font]TEC[font='微软雅黑',sans-serif]的加热制冷功能,除了需要对[/font]TEC[font='微软雅黑',sans-serif]模组的加载电流进行自动调节之外,还需在调节过程中能自动改变电流方向,为此,[/font]TEC[font='微软雅黑',sans-serif]执行机构配备了电源自动换向器。换向器接收加热和制冷控制信号,并根据控制信号大小和方向输出相应的工作电流。[/font][font='微软雅黑',sans-serif][font=微软雅黑, sans-serif] [/font]([/font]3[font='微软雅黑',sans-serif])温度传感器:温度传感器是决定温度控制精度的关键因素之一,因此本方案中配置了高等级的铂电阻温度计(如标准铂电阻温度计)或高等级热敏电阻温度传感器,使得温度传感器的温度分辨率能达到[/font]0.001[font='微软雅黑',sans-serif]℃以及测温精度能达到[/font]0.01~0.02[font='微软雅黑',sans-serif]℃。[/font][font='微软雅黑',sans-serif][font=微软雅黑, sans-serif] [/font]([/font]4[font='微软雅黑',sans-serif])超高精度[/font]PID[font='微软雅黑',sans-serif]控制器:决定温度控制精度的另一个关键因素是温度控制器的数据采集精度、控制算法和控制输出精度。为此,在本解决方案中采用了目前控制精度最高的[/font]VPC2021-1[font='微软雅黑',sans-serif]系列的工业用[/font]PID[font='微软雅黑',sans-serif]程序调节器,除具有不超过[/font]96mm[font='微软雅黑',sans-serif]×[/font]96mm[font='微软雅黑',sans-serif]×[/font]87mm[font='微软雅黑',sans-serif]的小巧尺寸外,关键是此[/font]PID[font='微软雅黑',sans-serif]调节器的模数转换[/font]AD[font='微软雅黑',sans-serif]为[/font]24[font='微软雅黑',sans-serif]位、数模转换[/font]DA[font='微软雅黑',sans-serif]为[/font]16[font='微软雅黑',sans-serif]位、双精度浮点运行运算以及[/font]0.01%[font='微软雅黑',sans-serif]的最小输出百分比,并可对控制程序进行编辑设计,适合红外目标模拟器在全温度量程内多个设定点的自动温度恒定控制。同时,此调节器采用了高级无超调[/font]PID[font='微软雅黑',sans-serif]控制模式,并具有[/font]PID[font='微软雅黑',sans-serif]参数自整定功能,结合超高精度的数据采集和控制输出,可实现十分精细的温度变化调节和控制。另外,此调节器附带功能强大的计算机软件,通过计算机运行此软件可快速进行[/font]PID[font='微软雅黑',sans-serif]控制器的远程设置和运行操作,同时能图形化的显示和记录所有设置参数、控制程序曲线和温度控制变化曲线。[/font][font='微软雅黑',sans-serif][font=微软雅黑, sans-serif] [/font]总之,本文所述的采用[/font]TEC[font='微软雅黑',sans-serif]模组进行的温度控制系统,已经成为超高精度可编程温度控制的一种标准和通用性方案,完全适用于红外目标模拟器的高精度温度控制。[/font][align=center][color=#339999]~~~~~~~~~~~~~~~[/color][/align]
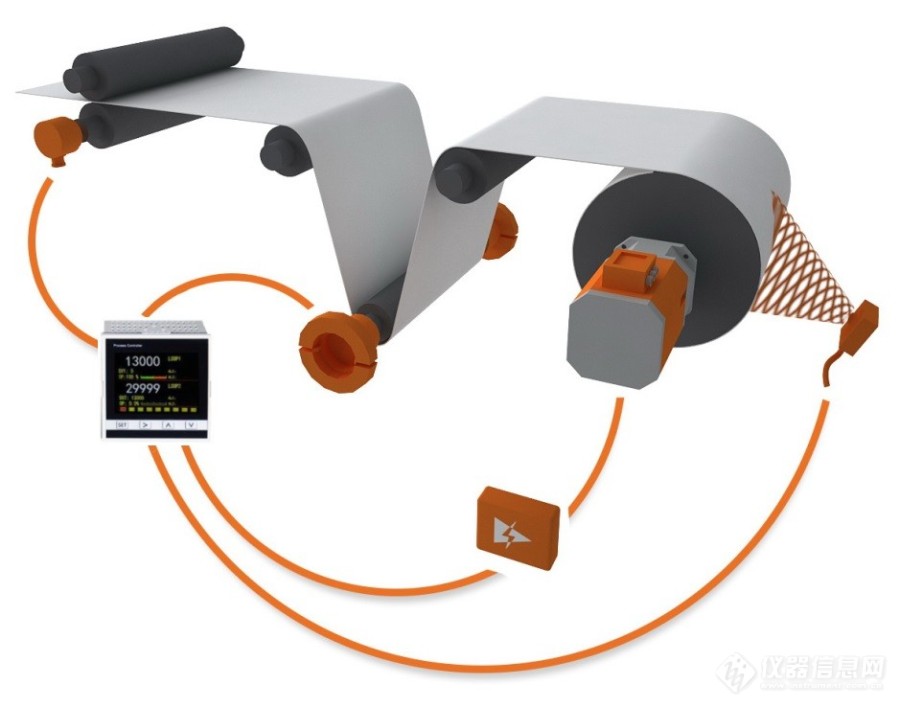
[align=center][color=#990000][b]超高精度浮辊和张力双回路控制器:Montalvo张力控制器的国产替代[/b][/color][/align][align=center][color=#990000]Unwind Tension Controller for Dancer Input with Tension Indication—— Domestic Substitution of Montalvo Tension Controller[/color][/align][align=center][img=超高精度浮辊和张力双回路控制器:Montalvo张力控制器的国产替代,690,542]https://ng1.17img.cn/bbsfiles/images/2022/10/202210092010572560_1350_3221506_3.jpg!w690x542.jpg[/img][/align][color=#990000]摘要:针对目前市场上张力控制器普遍存在的测控精度较差、功能单一、适用传感器类型少和PID参数无法自整定等问题,本文分析了国外浮辊和张力双通道控制器的技术特点。对标国外高端张力控制器产品,本文重点介绍了国产替代产品的性能,国产张力控制器同样具有浮辊和张力双回路控制功能,但由于每个通道都采用了24位AD、16位DA和双精度浮点运算,可以实现超高精度的张力控制,而所具有的PID自整定功能则使得操作更为快捷方便。[/color][align=center]~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~[/align][size=18px][color=#990000][b]一、问题的提出[/b][/color][/size]张力控制器主要应用于冶金,造纸,薄膜,染整,织布,塑胶,线材等设备上,是一种实现恒张力或者锥度张力控制的自动控制仪表,其作用主要是实现辊间的同步,收卷和放卷的均匀控制。一套典型的张力控制系统主要由张力控制器,张力读出器,张力检测器,制动器和离合器构成。根据环路可分为开环,闭环或自由环张力控制系统;根据对不同卷材的监测方式又可分为超声波式,浮辊式,跟踪臂式等。典型的张力控制器主要由AD,DA转换器和高性能微处理器等组成,张力控制器与张力传感器和电气比例阀组成典型的张力控制系统。在具体张力控制过程中,张力控制器是根据张力传感器和A/D模式转换器测量到的张力与设定的目标张力相比较后,经微处理器PID运算自动调整D/A输出从而改变电气比例阀的输出压力来实现卷料的张力调节,可广泛用于各种需对张力进行精密测控的场合,具有使用灵活和广泛的适用性。目前市场上有各种张力控制器,但在高精度张力控制过程中,普遍存在以下不足:(1)测量精度较低:普遍采用12位AD模数转换器,个别国外产品用了16位AD模数转换器,对于一些高精度的张力传感器输出显然无法准确测量,测量精度无法满足高精度控制要求。(2)输出精度较差:普遍采用12位DA数模转换器,个别国外产品用了14位DA数模转换器,对于一些高精度的张力控制显然无法实现。(3)浮点运算精度较差:目前市场上商品化张力控制器的PID运算基本都是采用单浮点方式进行,运算精度较差,从而使得输出百分比的最小调节量也只能为0.1%,根本无法进行电气比例阀输出压力的精细调节,进而无法实现超高精度的张力控制。(4)单通道控制:绝大多数张力控制器尽管可以实现如收放卷的扭矩控制,过程张力中的速度控制以及浮辊张力控制,但只能选择其中的一种控制模式。而个别国外的张力控制器产品,如Montalvo的Z4UI双回路控制器则能实现放卷扭矩和浮辊位置的同时控制。(5)传感器输入信号类型少:在各种张力控制中会采用到多种不同的传感器,如超声波探头,浮辊,电位器和激光等,这些不同传感器所输出的信号类型和量程有多种形式,但目前绝大多数张力控制器的输入型号类型非常有限。(6)PID参数无法自整定:在有些张力控制过程中,需要准确无超调的PID控制,快速且自动的选择合适PID则显着尤为重要,但目前很多张力控制器并没有这项PID参数自整定功能。针对上述目前张力控制器中普遍存在的问题,特别是为了实现超高精度张力控制以及相关控制器的国产替代,本文将对国外高端张力控制器技术特点进行分析,并对标国外产品介绍研发的新型浮辊和张力双回路超高精度控制器产品。[b][size=18px][color=#990000]二、Montalvo公司 Z4UI 双回路张力控制器技术特点分析[/color][/size][size=18px][color=#990000][/color][/size][/b]蒙特福Montalvo公司是国外著名的张力控制相关产品生产厂商,其最具特点的控制器产品是Z4UI浮辊和张力双回路控制器,我们将对标此张力控制器进行分析。蒙特福Z4UI浮辊和张力双回路控制系统结构如图1所示,控制器内置了张力指示器,能够同时检测浮辊电位计信号和张力检测器的张力信号,从而提供高精度的张力控制。它集合了浮辊吸收缓冲张力波动的功能和张力检测器精确、稳定的检测优势,通过渐进式“Progressive“ PID 控制电路调节放卷制动器的转矩输出,保持浮辊臂的位置不变来实现张力控制。模拟式张力表显示卷材的张力大小,操作员可直接监视张力稳定性,并根据张力表显示的实际卷材张力,来调节浮辊臂上的载荷从而保持理想张力。[align=center][color=#990000][img=01.Z4UI浮辊和张力双回路控制.jpg,690,275]https://ng1.17img.cn/bbsfiles/images/2022/10/202210092013010509_6406_3221506_3.jpg!w690x275.jpg[/img][/color][/align][align=center][color=#990000]图1 Z4UI双回路控制器在浮辊和张力控制系统中应用的结构示意图[/color][/align]由此可以看出,蒙特福Z4UI控制器是个典型的双回路闭环控制器。其中,一个回路是通过检测浮辊位置信号(DPS-1位置传感器或浮辊电位器)来控制第一个电气比例阀(I/P转换器)压力输出,由此来调整气缸位置将气压转换成扭矩输出达到张力调节。另一个回路通过检测卷径信号(接近开关或超声波探头)来控制第二个电气比例阀(I/P转换器)压力输出,由此来调整放卷位置达到张力调节。由此可见,蒙特福Z4UI双回路控制器是通过同时对两个变量的检测和控制来实现高精度的放卷调节。蒙特福Z4UI控制器的另外一个特点是采用RS-232与上位机(PLC或PC)进行通讯,采用控制软件进行所有操作,减少了人工界面操作的复杂程度。[b][size=18px][color=#990000]三、国产双回路超高精度张力控制器[/color][/size][/b]从上述蒙特福Z4UI双回路张力控制器技术特点可以看出,双回路张力控制器的核心技术内容就是一个非常典型的双通道PID控制器,张力的控制则是采用外置传感器实现电气比例阀的串级形式的PID控制,因此,双回路张力控制器的技术特征就是双通道的电气比例阀串级PID控制。基于此分析,结合我们在真空压力方面进行电气比例阀超高精度串级PID控制的成功经验,我们可以将通用型的VPC-2021系列PID调节器(单通道和双通道)应用于张力控制中,由此可完全实现蒙特福Z4UI双回路张力控制器的替代。VPC-2021-2系列双通道PID调节器是标准形式的工业用控制器,具有96×96mm、96×48mm和48×96mm三种规格,但其最大优点是具有超高精度检测和控制能力,其中具有24位AD模数转换、16位DA数模转换和双精度浮点运算能力,具备0.01%的最小输出百分比。用于张力控制的双通道超高精度PID控制器如图2所示,电气接线如图3所示,主要技术指标如下:[align=center][color=#990000][img=VPC 2021-2超高精度PID控制器,600,266]https://ng1.17img.cn/bbsfiles/images/2022/10/202210101508335313_3719_3221506_3.jpg!w690x307.jpg[/img][/color][/align][align=center][color=#990000]图2 VPC 2021-2系列双通道张力控制器[/color][/align](1)真彩色IPS TFT长寿命LED背光、全视角液晶显示。(2)独立双回路控制,每路控制输出刷新率50ms,双通道独立的输入和输出,双回路报警功能可以多功能应用,每通道都具备独立的PID控制功能,每个通道都可进行独立的手动和自动控制切换。(3)万能型信号检测能力,即每通道都具备47种输入信号形式,仅需通过设置极可完成信号类型和量程选择,由此可满足各种规格和形式的张力探测器的引入。除了能测量各种张力传感器、位置传感器给出的模拟电压、电流和电阻信号之外,还可以测量各种温度传感器和压力传感器等各种信号,传感器输出端直接接入控制器并在控制器上进行选择即可使用。(4)双通道独立控制输出,输出信号有线性电流、线性电压、继电器输出、固态继电器输出和可控硅输出五种形式,可用于直接驱动电气比例阀(或电子压力转换器)进行张力控制,也可以驱动各种阀门和加热器等执行机构进行真空度、压力和温度等参数的控制。(5)支持数字和模拟远程操作功能,支持标准MODBUS RTU 通讯协议。(6)采用自主改进型PID算法,支持对PV微分和无超调控制算法。5组PID存储和调用,10组输出限幅等实用功能。每个通道采用独立的PID参数,且可独立的进行PID参数自整定。(7)带传感器馈电供电功能(24V,50mA)。(8)支持一路过程变量变送功能,变送的过程变量可选PV测量值、SV设定值、控制输出值和偏差值,变送输出类型有4-20mA, 0-10mA, 0-20mA, 0-10V, 2-10V, 0-5V, 1-5V七种。(9)两组开关量光隔输入端,可以实现各种应用功能的灵活应用切换。(10)随机配备强大的控制软件,可通过软件进行控制参数设置、运行控制、过程曲线显示和存储,非常便于过程控制的调试。[align=center][img=,690,276]https://ng1.17img.cn/bbsfiles/images/2022/10/202210101726466183_8818_3221506_3.png!w690x276.jpg[/img][/align][align=center][color=#990000]图3 VPC 2021-2系列双通道控制器电气连接图[/color][/align]从上述国产控制器技术指标可以看出,国产VPC 2021-2系列双通道控制器的性能和功能要远优于蒙特福Z4UI控制器,并具有强大的拓展能力,完全可以实现对蒙特福Z4UI控制器的替代。[align=center]~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~[/align][align=center][/align][align=center][/align][align=center][/align]

[color=#ff0000]摘要:针对客户调压铸造炉对真空压力控制系统的技术要求,本文介绍了相应的解决方案和验证试验。方案的技术核心是基于高速动态平衡法,采用大流量压力控制装置,与传感器和真空压力控制器组成PID闭环控制回路,其特点是可快速实现设定压力控制,且可节省工作气体。此解决方案可以推广应用在其他形式的反重力铸造设备的真空压力控制系统。[/color][align=center][img=反重力合金铸造工艺中的高精度快速压力调节解决方案,600,294]https://ng1.17img.cn/bbsfiles/images/2022/12/202212301609202703_8417_3221506_3.jpg!w690x339.jpg[/img][/align][align=center]~~~~~~~~~~~~~~~~[/align][b][size=18px][color=#ff0000]1. 项目概述和技术要求[/color][/size][/b] 反重力铸造是以外部作用力驱动金属液,使其沿反重力方向进入型腔并完成充型和补缩的铸造方法。反重力铸造根据原理可以分为真空吸铸、低压铸造、差压铸造和调压铸造。调压铸造作为反重力铸造方法之一,其设备最为复杂,但功能最强大。其充型稳定性、充型能力和顺序凝固条件均优于其他反重力铸造,可铸造壁厚更薄,棒径更小且力学性能更好的大型薄壁件和棒状铸件。造成该设备复杂的主要原因是其不仅能实现正压控制,还能够实现负压控制,要求具有准确的真空压力测量和控制装置。 目前有客户设计了一种用于铸造均匀无偏析棒材的调压铸造炉,如图1所示,要求我们配套相应的真空压力控制系统,真空压力控制系统的具体工作流程如下:[align=center][color=#ff0000][b][img=调压铸造炉,500,481]https://ng1.17img.cn/bbsfiles/images/2022/12/202212301613183177_4714_3221506_3.jpg!w690x664.jpg[/img][/b][/color][/align][align=center][color=#ff0000][b]图1 用于铸造均匀无偏析棒材的调压铸造炉[/b][/color][/align] (1)物料甜装完毕合炉后,启动机械泵抽真空至0.1Pa量级时启动分子泵。 (2)真空度达到5×10-3Pa以上后开启加热工序。 (3)熔炼温度到达1450℃时,关闭抽真空系统,控制压力控制系统进行充氩气,使压力在4s内上升至0.25MPa。 由此确定的真空压力控制指标为: (1)真空压力范围: 5×10[sup]?-3[/sup][sup]?[/sup]Pa ~ 0.25MPa。 (2)压力控制:4s内达到0.25MPa。 (3)压力恒定精度:优于±2%。 针对上述调压铸造炉对真空压力控制系统的技术要求,本文将介绍相应的解决方案。解决方案的技术核心是采用大流量气体压力控制装置,与压力传感器和真空压力控制器组成PID闭环控制回路,其特点是所采用的高速动态平衡法不仅可以快速实现设定压力控制,而且还节省工作气体。此解决方案可以推广应用在其他形式的反重力铸造设备的真空压力控制系统。[b][size=18px][color=#ff0000]2. 解决方案[/color][/size][/b] 本文提出的解决方案如图2所示,其结构非常简单,但功能强大。[align=center][b][color=#ff0000][img=调压铸造炉压力控制系统示意图,690,367]https://ng1.17img.cn/bbsfiles/images/2022/12/202212301613496290_7813_3221506_3.jpg!w690x367.jpg[/img][/color][/b][/align][align=center][b][color=#ff0000]图2 反重力调压铸造炉正压压力控制装置方案示意图[/color][/b][/align] 图2所示的解决方案具有以下几方面的功能和特点: (1)压力传感器尽可能被安装在靠近铸造炉,以更准确的测量铸造炉内的压力变化。 (2)解决方案采用了先导阀驱动结构,即采用同样的先导阀可以驱动不同流量的背压阀,这样可根据不同铸造炉腔体大小选择合适的背压阀,满足不同反重力铸造设备中高速和准确的压力控制要求。 (3)采用上述方案,可以满足所有反重力铸造设备中的压力控制要求,最关键的是可以在正压控制过程中达到很高的速度,可以在几秒内达到设定正压压力值并保持稳定。 (4)此解决方案的另外一个特点是节省工作气体,整个正压压力控制过程中除所需的充气量之外,只泄露很少气体就可以达到设定压力并保持恒定,非常适合高价值惰性气体工作环境。 (5)解决方案采用了功能强大的超高精度真空压力控制器,针对反重力铸造中的升液阶段、充型阶段、结壳增压阶段、结壳保压阶段、结晶增压阶段、结晶保压阶段等不同的压力变化过程,可进行复杂的设定程序控制,并可同时存储多条工艺压力控制程序曲线以供调用。真空压力控制器带标准的MODBUS通讯协议,可方便的与上位机连接和组网控制。 (6)此解决方案结构简单且压力控制精度高,非常适用于大工件的多位并联加压铸造中的多点压力同步控制,避免形成不合理的压差。 (7)此解决方案具有很强的扩展性,如可以通过连接液面位置传感器等来更精密的控制铸造工艺压力变化。[b][size=18px][color=#ff0000]3. 高速压力控制考核验证[/color][/size][/b] 在反重力铸造工艺中,压力的高速是一个技术难点。为此,我们对上述解决方案中的压力控制速度进行了考核试验,试验装置如图3所示。[align=center][color=#ff0000][b][img=03.考核试验装置,690,354]https://ng1.17img.cn/bbsfiles/images/2022/12/202212301614138907_9684_3221506_3.jpg!w690x354.jpg[/img][/b][/color][/align][align=center][color=#ff0000][b]图3 正压压力响应速度考核试验装置[/b][/color][/align] 考核试验装置完全按照图2所示结构进行搭建,其中的铸造炉用一个三通管件进行模拟,整个考核装置的实验目的是验证解决方案能否在极快的速度内实现设定压力控制。 为了实时检测压力变化,在考试试验装置中的压力传感器上还连接了一个高精度的数据采集器,用了50ms的采样速率进行数据采集,数据采集器连接计算机,计算机通过采集软件获得压力随时间的变化曲线,由此来观察压力控制的快速响应细节。 在图3所示考核试验装置上,我们采用人工设定的方法对真空压力控制器输入设定值,由控制器完成压力调节和控制,由此来对一系列设定压力值进行了定点控制试验,并还分别进行了升压和降压过程的试验,结果如图4所示。[align=center][color=#ff0000][b][img=压力控制考核试验结果,550,282]https://ng1.17img.cn/bbsfiles/images/2022/12/202212301614415521_363_3221506_3.jpg!w690x354.jpg[/img][/b][/color][/align][align=center][color=#ff0000][b]图4 正压压力响应速度考核试验结果[/b][/color][/align] 为了量化压力控制速度和控制精度,将试验结果中的任选一个压力点的控制结果进行单独显示,如图5所示。从图5所示的结果可以看出,压力从1.8Bar 升到2.6 Bar用时不到1秒,达到±1%以内的控制稳定性则用时不到1.5秒,而在2秒之后可以达到±0.5%的控制稳定性。其他压力设定点的控制结果基本都相差无几,证明了此方案完全可以达到快速准确的压力控制。[align=center][b][color=#ff0000][img=单点压力控制结果,550,283]https://ng1.17img.cn/bbsfiles/images/2022/12/202212301615304911_3569_3221506_3.jpg!w690x356.jpg[/img][/color][/b][/align][align=center][b][color=#ff0000]图5 设定值0.26MPa时的压力控制结果[/color][/b][/align][b][size=18px][color=#ff0000]4. 结论[/color][/size][/b] 针对反重力铸造工艺中的压力控制,本文提出的压力控制解决方案可实现高速和高精度的压力控制,可在几秒的时间内实现±1%以内的控制精度,完全能够满足客户对压力高速控制的技术要求。同时,整个解决方案非常简单但功能强大和极易拓展应用,完全能满足目前各种精密反重力铸造工艺中对压力准确控制的要求,特别是适用于大尺寸工件反重力铸造中多个溶体保温炉的同步压力控制。[align=center]~~~~~~~~~~~~~~[/align]
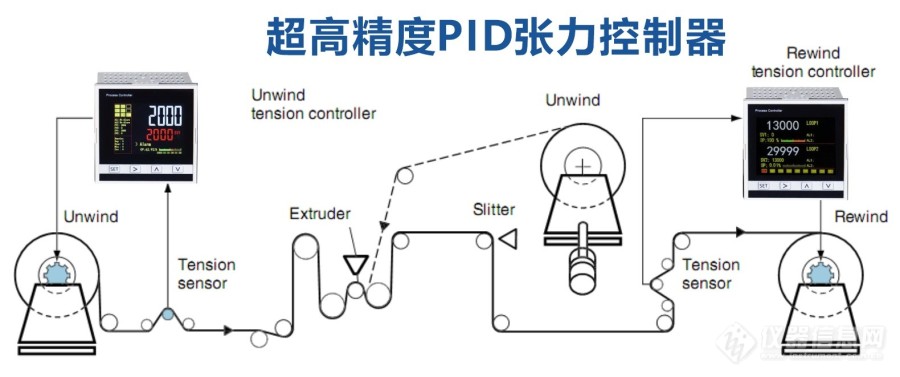
[size=16px][color=#ff0000]摘要:针对目前张力控制器中普遍存在测量控制精度较差和无法实现串级控制这类高级复杂控制的问题,本文介绍了具有超高精度和多功能的新一代张力控制器。这种新一代张力控制器具有24位AD模数转换、16位DA数模转换、双精度浮点运算和0.01%的最小输出百分比,同时还就有远程设定点和变送输出功能,可方便的实现两个参量的串级控制,并可进行手动和自动控制的开关切换,极大提高了张力控制的精密度,更是适合一些特殊应用中的微张力控制,甚至可以进行张力设定程序曲线的精确控制。[/color][/size][align=center][size=16px][img=微张力控制,650,272]https://ng1.17img.cn/bbsfiles/images/2023/04/202304110946105710_7747_3221506_3.jpg!w690x289.jpg[/img][/size][/align][size=18px][color=#ff0000][b]1. 问题的提出[/b][/color][/size][size=16px] 张力控制是一种对在两个加工设备之间作连续运动或静止的被加工材料所受的张力进行自动控制的技术。在各种连续生产线上,各种带材、线材、型材及其再制品,在轧制、拉拔、压花、涂层、印染、清洗以及卷绕等工序中常需要进行张力控制。[/size][size=16px] 张力控制中所用到的张力控制器是一种由单片机或者一些嵌入式器件及外围电路开发而成的系统,主要由A/D和D/A转换器以及高性能单片机等组成。在张力控制过程中,首先直接设定要求控制的张力值,让张力传感器采集的信号(一般为毫伏级别)作为张力反馈值,比较两者的偏差后,经内部智能PID运算处理后,调节执行机构,自动控制材料的放卷、中间引导及收卷的张力,达到系统响应最快的目的。目前的张力控制器普遍还存在以下几方面的问题:[/size][size=16px] (1)测量精度较低:普遍采用12位AD模数转换器,个别国外产品用了16位AD模数转换器,对于一些高精度的张力传感器输出显然无法准确测量,测量精度无法满足高精度控制要求。[/size][size=16px] (2)控制输出精度较差:普遍采用12位DA数模转换器,个别国外产品用了14位DA数模转换器,对于一些高精度的张力控制无能为力。[/size][size=16px] (3)浮点运算精度较低:目前市场上商品化张力控制器的PID运算基本都是采用单浮点方式进行,运算精度较低,输出百分比的最小调节量只有0.1%,无法进行超高精度的张力控制。[/size][size=16px] (4)传感器输入信号类型少:在各种张力控制中会采用到多种不同的传感器,如超声波探头,浮辊,电位器和激光等,这些不同传感器所输出的信号类型和量程有多种形式,但目前绝大多数张力控制器的输入型号类型非常有限,且不能方便的进行测量范围调整。[/size][size=16px] (5)功能简单:绝大多数张力控制器只能进行单变量的控制,如收放卷的扭矩控制,过程张力中的速度控制以及浮辊张力控制,但只能选择其中的一种控制参数,缺乏两个参数同时控制的功能,无法采用更高级的控制形式——串级控制来更好实现准确的张力调节。[/size][size=16px] (6)PID参数无法自整定:在有些张力控制过程中,需要准确无超调的PID控制,快速且自动的选择合适的PID参数则显着尤为重要,而目前大多张力控制器缺乏这种PID参数自整定功能。[/size][size=16px] 针对目前张力控制器中普遍存在的问题,特别是为了实现超高精度张力控制,本文将详细介绍超高精度工业用PID调节器及其在超高精度张力控制过程中的应用,特别还介绍了串级控制功能的具体应用。[/size][size=18px][color=#ff0000][b]2. 超高精度PID控制器[/b][/color][/size][size=16px] VPC-2021系列PID调节器是一种标准形式的工业用控制器,有单通道和双通道两个系列,具有96×96mm、96×48mm 和48×96mm三种尺寸规格,如图1所示。[/size][align=center][size=16px][color=#ff0000][b][img=01.超高精度PID控制器系列,650,223]https://ng1.17img.cn/bbsfiles/images/2023/04/202304110948313448_487_3221506_3.jpg!w690x237.jpg[/img][/b][/color][/size][/align][align=center][size=16px][color=#ff0000][b]图1 VPC2021系列超高精度PID控制器[/b][/color][/size][/align][size=16px] VPC2021系列PID控制器的最大优点是具有超高精度检测和控制能力,具有24位AD模数转换、16位DA数模转换和双精度浮点运算能力,0.01%的最小输出百分比。主要技术指标如下:[/size][size=16px] (1)真彩色IPS TFT长寿命LED背光、全视角液晶显示。[/size][size=16px] (2)独立的单回路和双回路控制,每个通道控制输出刷新率50ms,独立的PID控制功能,每个通道都可进行独立的手动和自动控制切换。[/size][size=16px] (3)万能型信号检测能力,即每通道都具备47种输入信号形式,仅需通过设置即可完成信号类型和量程选择,由此可满足各种规格和形式的张力探测器的引入。除了能测量各种张力传感器、位置传感器给出的模拟电压、电流和电阻信号之外,还可以测量各种温度传感器和压力传感器等各种信号,传感器输出端直接接入控制器并在控制器上进行选择即可使用。[/size][size=16px] (4)单、双通道独立控制输出,输出信号有线性电流、线性电压、继电器输出、固态继电器输出和可控硅输出五种形式,可用于直接驱动电气比例阀(或电子压力转换器)进行张力控制,也可以驱动各种阀门和加热器等执行机构进行真空度、压力和温度等参数的控制。[/size][size=16px] (5)具有远程设定点、变送和正反向控制功能,使得串级控制和分程控制成为可能。[/size][size=16px] (6)采用自主改进型PID算法,支持对PV微分和无超调控制算法。5组PID存储和调用,10组输出限幅等实用功能 。每个通道采用独立的PID参数 , 且可独立的进行PID参数自整定。[/size][size=16px] (7)支持数字和模拟远程 操 作 功 能,支持标准MODBUS RTU通讯协议。[/size][size=16px] (8)带传感器馈电供电功能(24V,50mA)。[/size][size=16px] (9)支持一路过程变量变送功能,变送的过程变量可选PV测量值、SV设定值、控制输出值和偏差值,变送输出类型有4-20mA, 0-10mA, 0-20mA, 0-10V, 2-10V, 0-5V, 1-5V七种。[/size][size=16px] (10)两组开关量光隔输入端,可以实现各种应用功能的灵活应用切换。[/size][size=16px] (11)随机配备强大的控制软件,可通过软件进行控制参数设置、运行控制、过程曲线显示和存储,非常便于过程控制的调试。[/size][size=18px][color=#ff0000][b]3. 串级控制在张力控制中的应用[/b][/color][/size][size=16px] 在典型的张力控制中多采用PID控制方式,由人工设定所需运行张力。设定值与张力传感器测量值进行比较计算后,PID控制器调节执行机构实现张力的稳定输出。典型张力控制器结构如图2所示。[/size][align=center][size=16px][color=#ff0000][b][img=02.典型单参数张力PID控制结构示意图,450,119]https://ng1.17img.cn/bbsfiles/images/2023/04/202304110949423425_329_3221506_3.jpg!w690x183.jpg[/img][/b][/color][/size][/align][align=center][size=16px][color=#ff0000][b]图2 典型单参数张力控制结构示意图[/b][/color][/size][/align][size=16px] 图2所示的采用单参数进行张力控制的方法在很多实际应用中并不能满足需要,往往需要引入第二个参数进行控制,由此需要PID串级控制方式,其结构如图3所示。[/size][align=center][size=16px][color=#ff0000][b][img=03.双参数串级控制PID张力控制结构示意图,600,165]https://ng1.17img.cn/bbsfiles/images/2023/04/202304110950250802_7112_3221506_3.jpg!w690x190.jpg[/img][/b][/color][/size][/align][align=center][size=16px][color=#ff0000][b]图3 双参数串级控制PID张力控制结构示意图[/b][/color][/size][/align][size=16px] 在图3所示的串级控制系统中包含了主和次两个闭环控制回路:[/size][size=16px] (1)次控制回路包括传感器1、执行机构和次PID控制器,其中将进入外围执行机构膜的参量作为次回路的控制参数。[/size][size=16px] (2)主控制回路则包括了传感器2、次控制回路、外围执行机构和主PID控制器,其中将外围执行机构的产出参数作为主回路的控制参数。[/size][size=16px] 由此可见,串级控制的核心是解决主PID控制器输出和次PID控制器的输入问题,采用一般的工业用PID控制器很难实现上述复杂的功能,如果采用PLC控制也需要复杂编程和相应硬件支持。为此,本解决方案采用了两台标准化的,且高精度多功能的PID控制器(VPC2021-1系列),具体接线如图4所示。[/size][align=center][size=16px][color=#ff0000][b][img=04.串级控制系统PID调节器接线示意图,690,193]https://ng1.17img.cn/bbsfiles/images/2023/04/202304110950400632_8989_3221506_3.jpg!w690x193.jpg[/img][/b][/color][/size][/align][align=center][size=16px][color=#ff0000][b]图4 串级控制系统PID调节器接线示意图[/b][/color][/size][/align][size=16px] 如图4所示,具有变送功能的主PID控制器,在主输入端口接收传感器2测量信号,然后根据所设置的固定值进行PID自动控制,相应的控制输出信号(输出值或偏差值)经过变送转换为4~20mA, 0~10mA, 0~20mA, 0~10V, 2~10V, 0~5V和1~5V七种模拟信号中的任选一种,并传送给次PID控制器的次输入端。[/size][size=16px] 具有远程设定点功能的次PID控制器,在次输入端口接收主PID控制器的变送信号作为变化的设定值,然后根据主输入端口接收到的传感器信号,进行PID自动控制,控制信号经主输出端口连接执行机构,对外部执行机构进行自动调节。[/size][size=16px] 需要注意的是,如果主PID控制器输出的控制信号能被次PID控制器次输入通道接收,且输入信号类型和量程与主输入通道接入的传感器一致,也可采用普通PID控制器作为主控制器。[/size][size=16px] 另外,从图4可以看出,由于VPC2021-1单通道PID控制器具有远程设定点功能,由此就可以很容易实现外部手动张力调节,而只需增加一个旋转电位器即可。手动调节接线如图5所示。[/size][align=center][size=16px][color=#ff0000][b][img=05.串级控制系统PID调节器手动和自动切换接线示意图,690,193]https://ng1.17img.cn/bbsfiles/images/2023/04/202304110950566532_2083_3221506_3.jpg!w690x193.jpg[/img][/b][/color][/size][/align][align=center][size=16px][color=#ff0000][b]图5 串级控制系统PID调节器手动和自动切换接线示意图[/b][/color][/size][/align][size=16px] 如图5所示,通过主PID控制器上连接的纽子开关,可以实现手动和自动功能切换。当切换到手动控制时,则可以通过接在主PID控制器次输入端子上的电压信号发生器,就可以实现手动调节控制。[/size][size=18px][color=#ff0000][b]4. 总结[/b][/color][/size][size=16px] 综上所述,通过采用新一代的超高精度多功能PID控制器,可以实现各种应用场景下的张力控制。与传统的张力控制器相比,新一代的张力控制器主要具有以下优势:[/size][size=16px] (1)超高精度:24位AD模数转换、16位DA数模转换和双精度浮点运算能力,0.01%的最小输出百分比。[/size][size=16px] (2)多功能:最多2通道的张力控制,可实现串级控制,可进行手动和自动功能切换。[/size][size=16px][/size][size=16px][/size][align=center][color=#ff0000]~~~~~~~~~~~~~~~~~~~[/color][/align]

[align=center][size=18px][color=#990000]TEC温控器:半导体制冷片新型超高精度温度程序PID控制器[/color][/size][/align][align=center][color=#666666]TEC Thermostat: A New Type of Ultra-high Precision Temperature Program PID Controller for Semiconductor Refrigerator[/color][/align][color=#990000]摘要:针对目前国内外市场上TEC温控器控温精度差、无法进行程序控温、电流换向模块体积大以及造价高的现状,本文介绍了低成本的超高精度PID控制器。24位模数采集保证了数据采集的超高精度,正反双向控制功能及其小体积大功率电流换向模块可用于半导体制冷、液体加热制冷循环器和真空压力的正反向控制,程序控制功能可实现按照设定曲线进行准确控制,可进行PID参数自整定并可存储多组PID参数。[/color][align=center]~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~[/align] [size=18px][color=#990000]一、TEC温控器国内外现状[/color][/size]半导体致冷片(Thermo Electric Cooler)是利用半导体材料的珀尔帖效应制成的一种片状器件,可通过改变电流方向来实现加热和制冷,在室温附近的温度范围内可作为冷源和热源使用,是目前温度控制精度最高的一种温控器件。在采用半导体制冷片进行控温时,需配合温度传感器、控制器和驱动电源一起使用,它们的选择决定了控温效果和成本。温度传感器可根据精度要求选择热电偶和热电阻传感器,控制器也是如此,但在高精度控制和电源换向模块方面,国内外TEC温控器普遍存在以下问题:(1)目前市场上二千元人民币以下的国内外温控器,普遍特征是数据采集精度不高,大多是12位模数转换,无法充分发挥TEC的加热制冷优势,无法满足高精度温度控制要求。(2)绝大多数低价的TEC温控器基本都没有程序控制功能,只能用于定点控制,无法进行程序升温。(3)极个别厂家具有高精度24位采集精度的TEC温控器,但没有相应的配套软件,用户只能手动面板操作,复杂操作要求的计算机通讯需要用户自己编程,使用门槛较高,而且价格普遍很高。(4)目前国内外在TEC控温上的另一个严重问题是电源驱动模块。在具有加热制冷功能的高档温控器中,TEC控温是配套使用了4个固态继电器进行电流换向,如果再考虑用于固态继电器的散热组件,这使得仅一个电流换向模块往往就会占用较大体积,且同时增加成本。[size=18px][color=#990000]二、国产24位高精度可编程TEC温控器[/color][/size]为充分发挥TEC制冷片的强大功能,并解决上述TEC温控器中存在的问题,控制器的数据采集至少需要16位以上的模数转换器,而且具有编程功能。目前我们已经开发出VPC-2021系列24位高精度可编程通用性PID控制器,如图1所示。此系列PID控制器功能十分强大,配套小体积大功率的电流换向器,可以完全可以满足TEC制冷片的各种应用场合,且性价比非常高。[align=center][color=#990000][img=TEC温控器,650,338]https://ng1.17img.cn/bbsfiles/images/2021/12/202112232210356263_6759_3384_3.png!w650x338.jpg[/img][/color][/align][align=center][color=#990000]图1 国产VPC-2021系列可编程PID温度控制器[/color][/align]VPC-2021系列控制器主要性能指标如下:(1)精度:24位A/D,16位D/A。(2)多通道:独立1通道或2通道。可实现双传感器同时测量及控制。(3)多种输出参数:47种(热电偶、热电阻、直流电压)输入信号,可实现不同参量的同时测试、显示和控制。(4)多功能:正向、反向、正反双向控制、加热/制冷控制。(5)PID程序控制:改进型PID算法,支持PV微分和微分先行控制。可存储20组分组PID,支持20条程序曲线(每条50段)。(6)通讯:两线制RS485,标准MODBUSRTU 通讯协议。(7)软件:通过软件计算机可实现对控制器的操作和数据采集存储。可选各种功率大小的集成式电流换向模块,只需一个模块就可以完成控制电流的自动换向,减小体积和降低成本。[align=center][/align][align=center]~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~[/align]

[align=center][img=,599,441]https://ng1.17img.cn/bbsfiles/images/2021/06/202106200929562418_9505_3384_3.png!w599x441.jpg[/img][/align][size=18px][color=#990000]一、简介[/color][/size] 真空压力控制器是指以气体管道或容器中的真空度(压力或压强)作为被控制量的反馈控制仪器,其整个控制回路是闭环的,控制回路由真空度传感器、真空压力控制器和电动调节阀组成。 依阳公司的VPC2021系列控制器是一种强大的多功能高度智能化的真空压力测量和过程控制仪器,采用了24位数据采集和人工智能PID控制技术,可与各种型号的真空压力传感器(真空计)、流量计、温度传感器、电动调节阀门和加热器等连接,可实现高精度真空压力(压强)、流量和温度等参量的定点和程序控制,是一种替代国外高端产品的高性能和高性价比控制器。[size=18px][color=#990000]二、主要技术指标[/color][/size] (1)测量精度:±0.05%FS(24位A/D)。 (2)输入信号:32种信号输入类型(电压、电流、热电偶、热电阻),可连接众多真空压力传感器。 (3)控制输出:4种控制输出类型(模拟信号、固态继电器、继电器、可控硅),可连接众多电动调节阀。 (4)控制算法:PID控制和自整定(可存储和调用20组PID参数)。 (5)控制方式:定点和程序控制,最大可支持9条控制曲线,每条可设定24段程序曲线。 (6)控制周期:50ms。 (7)通讯方式:RS 485和以太网通讯。 (8)供电电源:交流(86-260V)或直流24V。 (9)外形尺寸: 96×96×136.5mm (开孔尺寸92×92mm)。[size=18px][color=#990000]三、特点和优势[/color][/size] (1)高精度24位数据采集,使得此系列控制器具有高精度的控制能力。 (2)具有各种不同类型信号的输入功能,可覆盖多种测量传感器,既可连接真空计用来控制真空压力和压强,也可用来控制其它变量,如连接流量计用来控制流量、连接温度传感器用来进行温度控制等。 (3)可连接和控制几乎所有的电动调节阀和数字控制阀门,也可连接控制各种加热装置,结合传感器由此组成可靠的闭环控制系统。 (4)控制器体积小巧和使用灵活,即可独立做为面板型控制器使用,也可集成在测试系统整机中使用。 (5)采用了标准的MODBUS通讯协议,便于控制器与上位机通讯和进行二次开发。 (6)具有2路输出功能,可实现真空压力的两种控制模式,一种是可变气流量(上游控制)压强控制模式,另一种是可变通导(下游控制)流量调节模式。[align=center][color=#990000][img=,300,253]https://ng1.17img.cn/bbsfiles/images/2021/06/202106200932222782_1134_3384_3.png!w300x253.jpg[/img][/color][/align][align=center][color=#990000]上游控制压强模式[/color][/align][align=center][color=#990000][img=,300,252]https://ng1.17img.cn/bbsfiles/images/2021/06/202106200932370447_2503_3384_3.png!w300x252.jpg[/img][/color][/align][align=center][color=#990000]下游控制压强模式[/color][/align][align=center][color=#990000][img=,300,249]https://ng1.17img.cn/bbsfiles/images/2021/06/202106200932454481_7140_3384_3.png!w300x249.jpg[/img][/color][/align][align=center][color=#990000]上游和下游同时控制的双向模式[/color][/align][size=18px][color=#990000]四、外形和开孔尺寸[/color][/size][align=center][img=,690,317]https://ng1.17img.cn/bbsfiles/images/2021/06/202106200932536698_9309_3384_3.png!w690x317.jpg[/img][/align][align=center]~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~[/align]







 我要推广仪器
我要推广仪器
 下载APP
下载APP