推荐厂家
暂无
暂无
 留言咨询
留言咨询
留言咨询
留言咨询
留言咨询
留言咨询

 400-860-5168转1451
留言咨询
400-860-5168转1451
留言咨询
 400-860-5168转1451
留言咨询
400-860-5168转1451
留言咨询
 400-860-5168转1895
留言咨询
400-860-5168转1895
留言咨询






MILS-F31迷你型激光雷达采用时间飞行(TOF)测距原理,结合了光学、电学机械运动学等多学科领域前沿技术,MILS-F31能够实现270°视场角、8米范围内的±3cm的准确测量。MILS-F31是一款工业级别的扫描式迷你型激光雷达,内嵌成熟的避障算法,支持16个区域组的避障设置,可广泛应用于AGV、机器人的避障场合。激光防护等级1级,人眼安全 大视场、准确测量、避障区域可灵活设置 准确温控设计,工作温度范围- 25℃~ + 50℃ 抗强光,性光路设计、多级滤光处理 体积小巧,易装配,适用于多种AGV机型。[img=,690,460]https://ng1.17img.cn/bbsfiles/images/2023/06/202306140951318838_9210_5922841_3.jpg!w690x460.jpg[/img]

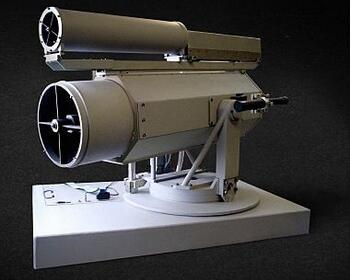
激光雷达可以按照所用激光器、探测技术及雷达功能等来分类。目前激光雷达中使用的激光器有二氧化碳激光器,Er:YAG激光器,Nd:YAG激光器,喇曼频移Nd:YAG激光器、GaAiAs半导体激光器、氦-氖激光器和倍频Nd:YAG激光器等。其中掺铒YAG激光波长为2微米左右,而GaAiAs激光波长则在0.8-0.904微米之间。根据探测技术的不同,激光雷达可以分为直接探测型和相干探测型两种。其中直接探测型激光雷达采用脉冲振幅调制技术(AM),且不需要干涉仪。相干探测型激光雷达可用外差干涉,零拍干涉或失调零拍干涉,相应的调谐技术分别为脉冲振幅调制,脉冲频率调制(FM)或混合调制。按照不同功能,激光雷达可分为跟踪雷达,运动目标指示雷达,流速测量雷达,风剪切探测雷达,目标识别雷达,成像雷达及振动传感雷达。激光雷达最基本的工作原理与无线电雷达没有区别,即由雷达发射系统发送一个信号,经目标反射后被接收系统收集,通过测量反射光的运行时间而确定目标的距离。至于目标的径向速度,可以由反射光的多普勒频移来确定,也可以测量两个或多个距离,并计算其变化率而求得速度,这是、也是直接探测型雷达的基本工作原理。由此可以看出,直接探测型激光雷达的基本结构与激光测距机颇为相近。相干探测型激光雷达又有单稳与双稳之分,在所谓单稳系统中,发送与接收信号共同在所谓单稳态系统中,发送与接收信号共用一个光学孔径。并由发射/接收(T/R)开头隔离。T/R开关将发射信号送往输出望远镜和发射扫描系统进行发射,信号经目标反射后进入光学扫描系统和望远镜,这时,它们起光学接收的作用。T/R开关将接收到的辐射送入光学混频器,所得拍频信号由成像系统聚焦到光敏探测器,后者将光信号变成电信号,并由高通滤波器将来自背景源的低频成分及本机振荡器所诱导的直流信号统统滤除。最后高频成分中所包含的测量信息由信号和数据处理系统检出。双稳系统的区别在于包含两套望远镜和光学扫描部件,T/R开关自然不再需要,其余部分与单稳系统的相同。美国国防部最初对激光雷达的兴趣与对微波雷达的相似,即侧重于对目标的监视、捕获、跟踪、毁伤评(SATKA)和导航。然而,由于微波雷达足以完成大部分毁伤评估和导航任务,因而导致军用激光雷达计划集中于前者不能很好完成的少量任务上,例如高精度毁伤评估,极精确的导航修正及高分辨率成像。较早出现的一种激光雷达称为“火池”,它是由美国麻省理工学院的林肯实验室投资,于60年代末研制的。70年代初,林肯实验室演示了火池雷达精确跟踪卫星,获得多普勒影像的能力。80年代进行的实验证明,这种CO2激光雷达可以穿透某些烟雾,识破伪装,远距离捕获空中目标和探测化学战剂。发展到80年代末的火池激光雷达,采用一台高稳定CO2激光振荡器作为信号源,经一台窄带CO2激光放大器放大,其频率则由单边带调制器调制。另有工作于蓝-绿波段的中功率氩离子激光与上述雷达波束复合,用于对目标进行角度跟踪,而雷达波束的功能则是收集距离――多普勒影像,实时处理并加以显示。两束波均由一个孔径为1.2M的望远镜发射并接收。据报道,美国战略防御局和麻省理工学院的研究人员于1990年3月用上述装置对一枚从弗吉尼亚大西洋海岸发射的探空火箭进行了跟踪实验。在二级点火后6分钟,火箭进入亚轨道,即爬升阶段,并抛出其有效负载,即一个形状和大小均类似于弹道导弹再入飞行器的可充气气球。该气球有气体推进器以提供与再入飞行器和诱饵的物理结构相一致的动力学特性。目标最初由L波段跟踪雷达和X波段成像雷达进行跟踪。并将这些雷达传感器取得的数据交给火池激光雷达,后者成功地获得了距离约800千米处目标的像。[~116966~][~116967~][~116968~][img]http://ng1.17img.cn/bbsfiles/images/2017/01/201701191651_624049_1602049_3.jpg[/img]
近日,国产激光雷达企业速腾聚创科技有限公司(以下简称“速腾聚创”)在香港联交所主板挂牌上市,成为港股激光雷达第一股,2024年中国传感器产业第一股。本次IPO最终发售价定为每股43.00港元 ,全球发售2290.98万股股份,募资总额为9.85 亿港元,速腾聚创上市后股票很快破发,截至当日收盘,公司市值193.2亿港元,成为全球市值最高的激光雷达企业。速腾聚创是激光雷达及感知解决方案市场的全球领导者,通过芯片、激光雷达平台与感知算法三大核心技术闭环,为市场提供具有信息理解能力的智能激光雷达系统,颠覆传统激光雷达硬件纯信息收集的定义。据介绍,速腾聚创是全球最早实现车规级固态激光雷达量产的激光雷达公司,也是全球首家开启车规级激光雷达项目量产交付的激光雷达公司。截至2023年3月31日,与全球其他激光雷达公司相比,速腾聚创服务的汽车整车厂和一级供应商数量最多、拥有前装量产定点车型最多及实现SOP车型最多。截至2023年12月18日,速腾聚创已取得21家汽车整车厂及一级供应商的超60款车型的量产定点订单,其中帮助24款车型实现SOP。出货量方面,截至2023年10月31日止,前十个月,速腾聚创的激光雷达产品及用于 ADAS应用的激光雷达产品的销量分别为约136,000台及约121,700台,较2022年同期的约40,700 台及24,400台分别大幅增加,并且超过2020~2022年前三年出货量总和。此外,10月份单月激光雷达销量近30000台,创单月销量历史记录。2024年,速腾聚创激光雷达的预计交付量或将超过100万颗,其中速腾聚创激光雷达产品更是供货问界M7/M5、小鹏G9/X9、极氪007、比亚迪仰望U8等众多明星车型。[来源:仪器信息网] 未经授权不得转载[align=right][/align]









 我要推广仪器
我要推广仪器
 下载APP
下载APP