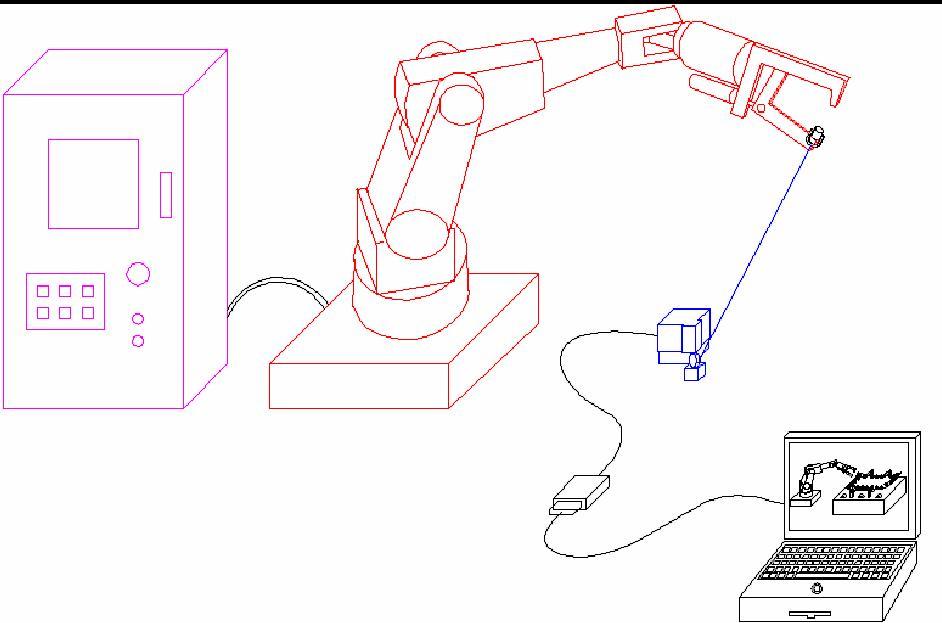
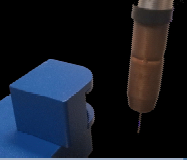
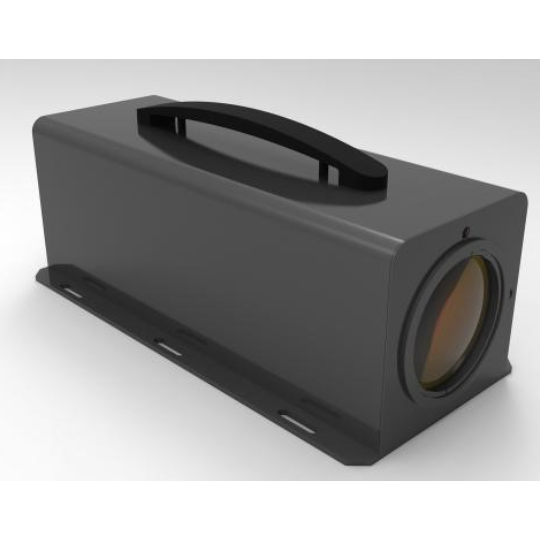
机器人精度标定上海埃飞电子科技有限公司能提供专业的机器人性能测试、校准标定检测服务,而且能提供机器人改进补偿方案。公司自从2012年引进美国Dynalog公司的专业机器人测试标定设备,5年来均与国内各大机器人厂商、机器人集成商、机器人使用终端、机器人研究院校、机器人检测机构等单位取得良好的合作。 Dynalog公司自1992年在美国成立起,一直从事机器人性能测试校准标定研究,并在1998年制定了欧洲机器人测试标准(ISO-9283标准,机器人业界最权威的标准)和美国机器人测试标准(ANSI/RIA 15.05标准)。中国机器人国标GB12642直接等同于ISO-9283标准。Dynalog公司于2001年申请了美国机器人测试校准专利。专利号为:US 6,321,137,B1。20年来,该公司与世界上知名机器人生产商、集成商以及终端用户取得了良好的合作。同时,Dynalog创始人Pierre博士也在2004年荣获了恩格尔伯格机器人奖。(美国恩格尔伯格被称为世界机器人之父,研发出了世界第一台机器人。荣获恩格尔伯格奖是机器人业界最高的荣誉。) Dynalog公司为机器人生产工艺流程及机器人不同应用方面能提供一套完整的解决方案,以确保机器人从生产到应用过程中每个环节都能有一个良好的精度。曾多次帮助国内外大型企业、研究所及高校建设整个机器人生产应用测试平台。 Dynalog服务的客户包括使用机器人的最终用户和系统集成商,以及所有工业机器人制造商,业务遍及北美,欧洲和亚洲的66个国家和地区,目前已超过500多套系统成功地应用在客户现场。 例如:ABB, FUNAC, KUKA , Motoman / Yaskawa,OTC-DAIHEN, COMAU, REIS, NACHI, Kawaski, Staubli, Panasonic, Hyundai, 西门子、奇瑞埃夫特、上海新时达、熊猫电子、广州数控、深圳汇川科技、南京埃斯顿等。 机器人生产以及应用过程中,我们面临的问题:1、 对自己研发出来的机器人本体各项性能没有一个客观、准确的认识。2、 针对自己机器人本体性能不太好,没有有效的措施来提高、校准、改善机器人本体性能。3、 结合机器人实际复杂应用环境,机器人在作业过程中难以时时刻刻保持机器人工具重复性精度。4、 机器人长时间作业,机器人会自发热及周边环境温度会发生变化导致机器人精度产生偏离的情况。5、 标定机器人模型软件数据库 为此,针对上述问题,Dynalog对应分别提供以下四套设备。来确保机器人生产应用工艺过程中各个环节正常运行。 具体设备如下:(一)CompuGauge机器人轨迹测试性能评估系统 主要用途:按照ISO-9283欧洲机器人标准(机器人业界最权威的标准)ANSI/RIA 15.05美国机器人标准等同于GB-12642(中国机器人标准)来测试机器人的性能,使得工程师对自己生产出来的机器人各项性能指标有一个准确、全面、客观地认识,针对测出的结果做初步分析。 具体功能:1、 位姿准确度和位姿重复性(pose accuracy and pose repeatability)2、 多方向位姿准确性变动 (multi-direction pose accuracy variation)3、 距离准确度和距离重复性(distance accuracy and distance repeatability)4、 位置稳定时间(position stabilization time)5、 位置超调量(position overshoot)6、 位姿特性漂移(drift of pose characteristic)7、 互换性(exchangeability)8、 轨迹准确度和轨迹重复性(path accuracy and path repeatability)9、 重定向轨迹准确度(path accuracy on reorientation)10、 拐角偏差(cornering deviations)11、 轨迹速度特性(path velocity characteristic)最大可测试5m/s 12、 最小定位时间(minimum posing time)13、 静态柔顺性(static compliance)14、 摆动偏差(weaving deviations)15、 轨迹加速度特性(path acceleration characteristic)最大可测试5G( 50m/s2 )16、 画圆分析(curve fit analysis)17、 振动频率测试(vibration frequency measurement)18、 各轴齿轮间隙测试(every axis backlash measurement)19、 6D(X,Y,Z,W,P,R)姿态测试 6D(X,Y,Z,W,P,R)measurement20、 抖动测试 jitter measurement21、 温度漂移测试(warm-up drift measurement)22、 循环时间测试(cycle time measurement)23、 轨迹任何一点(X,Y,Z)随时间变化的曲线(Robot Position (xyz) vs. Time)24、 软件直接生成ISO-9283测试报告(Software directly generated ISO - 9283 test report) (二)DynaCal-lite机器人校准、标定设备主要用途:针对测试出机器人性能不太理想的情况。用此设备可以快速对机器人主要参数进行校准标定并补偿相应的修正参数。例如:机器人TCP点,Home点(零点),连杆长度,机器人各轴夹角,平行度、载重量,减速比,耦合比,机器人基座等参数。从而进一步改善机器人性能。 具体功能:1、校准零点(home)精度2、校准连杆长度3、校准转角角度4、校准平行度5、校准TCP中心点精度6、校准机器人基座7、校准机器人减速比8、校准机器人耦合比9、校准机器人各轴自重 (三)AutoCal 机器人长时间工具重复性测试系统主要用途:在线长时间监测机器人工具重复性技术规格: ??标准的快速-检查时间:3到5秒??标准的恢复校准时间:大约一分钟??功率:12-24额定电压,最大50马 ??一个激光发射源??一个带环境滤光器的线性传感器??一个带有两个销子和螺钉固定孔的金属外壳??一个3.5英寸触摸屏带有Windows CE 6 操作系统的微型处理器??一个AutoCal传感器连接器??4个安装孔的钢外壳??一根10米长传感器连接电缆具体功能:??快速检测机器人以及监测机器人TCP点精度??TCP、Home点复位??双重补偿模式(1)直接上传数据补偿TCP & Home;(2)过滤机器人程序 (四)AccuBeam 机器人TCP、Home点复位系统及温度补偿系统主要用途:在线恢复机器人TCP和Home点精度,且具备温度补偿功能。以确保机器人在生产线上不会受到周围环境温度改变及机器人自发热对机器人精度的影响。 技术规格:一个带有四个线性阵列式传感器的测试单元一个以太网连接器一根4针电源线一根以太网连接电缆 M-12一根电源连接电缆 M-4一套AccuBeam 系统文件2个横跨式高精度激光发射器高精度无接触式测量机器人软件证书机器人控制器的沟通窗口 具体功能:快速监测机器人精度 Home点复位温度补偿以及机器人温度漂移程序更新关节复位旋转校准超高速对比机器人性能超大范围测量针对于TCP中心点的大偏差
 留言咨询
留言咨询

 400-659-9826
400-659-9826






























 我要推广仪器
我要推广仪器
 下载APP
下载APP