推荐厂家
暂无
暂无
 留言咨询
留言咨询
留言咨询
留言咨询
留言咨询
留言咨询
 400-860-5168转4759
留言咨询
400-860-5168转4759
留言咨询
 400-860-5168转2004
留言咨询
400-860-5168转2004
留言咨询
 400-860-5168转6201
留言咨询
400-860-5168转6201
留言咨询






触觉传感器 tactile sensor 用于机器人中模仿触觉功能的传感器。触觉是人与外界环境直接接触时的重要感觉功能,研制满足要求的触觉传感器是机器人发展中的技术关键之一。随着微电子技术的发展和各种有机材料的出现,已经提出了多种多样的触觉传感器的研制方案,但目前大都属于实验室阶段,达到产品化的不多。触觉传感器按功能大致可分为接触觉传感器、力-力矩觉传感器、压觉传感器和滑觉传感器等。 接触觉传感器 用以判断机器人(主要指四肢)是否接触到外界物体或测量被接触物体的特征的传感器。接触觉传感器有微动开关、导电橡胶、含碳海绵、碳素纤维、气动复位式装置等类型。①微动开关:由弹簧和触头构成。触头接触外界物体后离开基板,造成信号通路断开,从而测到与外界物体的接触。这种常闭式(未接触时一直接通)微动开关的优点是使用方便、结构简单,缺点是易产生机械振荡和触头易氧化。②导电橡胶式:它以导电橡胶为敏感元件。当触头接触外界物体受压后,压迫导电橡胶,使它的电阻发生改变,从而使流经导电橡胶的电流发生变化。这种传感器的缺点是由于导电橡胶的材料配方存在差异,出现的漂移和滞后特性也不一致,优点是具有柔性。③含碳海绵式:它在基板上装有海绵构成的弹性体,在海绵中按阵列布以含碳海绵。接触物体受压后,含碳海绵的电阻减小,测量流经含碳海绵电流的大小,可确定受压程度。这种传感器也可用作压力觉传感器。优点是结构简单、弹性好、使用方便。缺点是碳素分布均匀性直接影响测量结果和受压后恢复能力较差。④碳素纤维式:以碳素纤维为上表层,下表层为基板,中间装以氨基甲酸酯和金属电极。接触外界物体时碳素纤维受压与电极接触导电。优点是柔性好,可装于机械手臂曲面处,但滞后较大。⑤气动复位式:它有柔性绝缘表面,受压时变形,脱离接触时则由压缩空气作为复位的动力。与外界物体接触时其内部的弹性圆泡(铍铜箔)与下部触点接触而导电。优点是柔性好、可靠性高,但需要压缩空气源。
触觉传感器 tactile sensor 用于机器人中模仿触觉功能的传感器。触觉是人与外界环境直接接触时的重要感觉功能,研制满足要求的触觉传感器是机器人发展中的技术关键之一。随着微电子技术的发展和各种有机材料的出现,已经提出了多种多样的触觉传感器的研制方案,但目前大都属于实验室阶段,达到产品化的不多。触觉传感器按功能大致可分为接触觉传感器、力-力矩觉传感器、压觉传感器和滑觉传感器等。 接触觉传感器 用以判断机器人(主要指四肢)是否接触到外界物体或测量被接触物体的特征的传感器。接触觉传感器有微动开关、导电橡胶、含碳海绵、碳素纤维、气动复位式装置等类型。①微动开关:由弹簧和触头构成。触头接触外界物体后离开基板,造成信号通路断开,从而测到与外界物体的接触。这种常闭式(未接触时一直接通)微动开关的优点是使用方便、结构简单,缺点是易产生机械振荡和触头易氧化。②导电橡胶式:它以导电橡胶为敏感元件。当触头接触外界物体受压后,压迫导电橡胶,使它的电阻发生改变,从而使流经导电橡胶的电流发生变化。这种传感器的缺点是由于导电橡胶的材料配方存在差异,出现的漂移和滞后特性也不一致,优点是具有柔性。③含碳海绵式:它在基板上装有海绵构成的弹性体,在海绵中按阵列布以含碳海绵。接触物体受压后,含碳海绵的电阻减小,测量流经含碳海绵电流的大小,可确定受压程度。这种传感器也可用作压力觉传感器。优点是结构简单、弹性好、使用方便。缺点是碳素分布均匀性直接影响测量结果和受压后恢复能力较差。④碳素纤维式:以碳素纤维为上表层,下表层为基板,中间装以氨基甲酸酯和金属电极。接触外界物体时碳素纤维受压与电极接触导电。优点是柔性好,可装于机械手臂曲面处,但滞后较大。⑤气动复位式:它有柔性绝缘表面,受压时变形,脱离接触时则由压缩空气作为复位的动力。与外界物体接触时其内部的弹性圆泡(铍铜箔)与下部触点接触而导电。优点是柔性好、可靠性高,但需要压缩空气源。
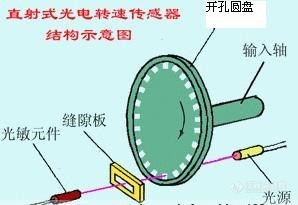
色谱仪常用电气部件 位置传感器 色谱仪器内存在多个运动部件。例如HPLC紫外检测器中的光栅、GC和HPLC的自动进样器、GC柱箱后开门等。部件的运动,实现多种不同的功能。 仪器系统需要监控运动部件的速度、角速度、位置。系统工作中需要监视机械部件运动的位置是否正确,实现这一目的的部件就是位置传感器。 常见的位置传感器,大致分为有机电式和光电式,偶见磁电式传感器。 机电式位置传感器。 1 机械开关 有些型号的GC柱箱门上,能看到一个金属按钮,当柱箱门打开,仪器会报警,柱箱风扇停转,这个按钮就是一个简单的机械开关,是最简单传感器。 2 微动开关 http://ng1.17img.cn/bbsfiles/images/2013/07/201307222208_453043_1604036_3.jpg 我们经常会接触到微动开关,鼠标的按键就是微动开关。按下鼠标按键,就能听到清脆的咔嗒声,这就是微动开关动作的声音。微动开关的原理比较简单,也是属于机械触点方式的位置传感器。http://ng1.17img.cn/bbsfiles/images/2013/07/201307222208_453044_1604036_3.jpg 一般常见于LC和GC的各种位置检测,只给出“部件就位”和“部件未就位”两个信号。 微动开关结构比较简单,故障率比较低。 2 光电传感器 槽型光电传感器的外观http://ng1.17img.cn/bbsfiles/images/2013/07/201307222208_453045_1604036_3.jpg 工作原理图http://ng1.17img.cn/bbsfiles/images/2013/07/201307222208_453046_1604036_3.jpg 光电式的传感器。光电式传感器是非接触式传感器。结构如图所示,传感器内部有一个光源(发光二极管)和受光器(光敏三极管)。正常工作的时候,光源部分施加电流,光源发出光线,照射到受光器表面,受光器会输出稳定的信号。 一般运动部件会安装有挡片,运动部件运行到合适位置,则挡片位置达到光源和受光器之间,光线被阻断,受光器就会给出对应的信号。 像微动开关一样,传感器只给出“位置就绪”和“位置未就绪”两个信号。但是由于部件不存在接触和磨损,寿命较长。也不存在机械开关存在的电磁干扰和电火花问题,比较安全,也不容易干扰其他电气部件工作。 除了常见的槽型光电传感器、对射式光电传感器,还有反射式、扩散发射式的。 光电传感器配合编码器(码盘)使用,可以实现精细的位置检测。一般回用于需要精确控制的场合,比如自动进样器。 http://ng1.17img.cn/bbsfiles/images/2013/07/201307222208_453047_1604036_3.jpg 如图,圆盘的精细动作可以被光电传感器检测到。 传感器除了可以给出“部件是否到位”的信号,还可以给出“现在部件具体位置”的信号。 另外有磁电式的位置传感器,相对使用较少,也是非接触式传感器,寿命较高,但比较光电传感器,不容易实现精细控制。 小结: 介绍了常见的两种位置传感器原理和简单应用。










 我要推广仪器
我要推广仪器
 下载APP
下载APP