[size=16px][color=#ff0000][b][url=https://www.instrument.com.cn/job/position-78514.html]立即投递该职位[/url][/b][/color][/size][b]职位名称:[/b]机器视觉算法工程师[b]职位描述/要求:[/b]一、岗位职责:1.负责研发机器学习、模式识别、深度学习算法开发,应用于图像识别和分类;2.负责物体(纤维)检测、识别等相关计算机视觉算法在纺织行业的应用和需求;3.参与项目和产品需求的相关算法分析、集成和优化;4.评估和测试算法可行性及监控算法效果,根据用户需求进行分析改进;5.负责与嵌入式工程师协作,搭建算法模块;6.关注计算机视觉算法前沿技术与创新使用场景相结合的研发和工程实现。二、任职要求:1.硕士及以上学历(博士优先),计算机科学、信息工程、电子工程、机器人学等专业; 2.两年以上机器学习、机器视觉算法模型训练的工作经验3.在模式识别、机器学习、深度学习、计算摄影、图像处理等领域有深入认识,并了解各个算法的条件和瓶颈;4.熟悉图像处理基本方法(边缘检测,区域提取,低通滤波,特征提取,交点检测,二值化等),有OpenCV或者类似图形库开发经验 5.熟练掌握CNN, RCNN, ResNet等深度学习相关算法和模型,熟悉深度学习计算框架包括Tensorflow, MXNET, Caffe在内的其中一种;6.精通python或C++其中一种编程语言,有CUDA编程经验者优先;7.在相关领域主流会议或期刊发表过论文(CVPR/ICCV/ECCV/NIPS/ICML/ICLR/IROS/ICRA/SIGRAPH)者优先;8.具有良好的沟通和写作能力,积极主动,具有创业热情;9.熟练的英文文献阅读能力,具有较强的论文复现能力。三、公司和产品简介LabWorld 是一家高科技分析仪器及应用解决方案开发公司,旨在利用数字化、大数据、人工智能等技术使得科研、检测人员的实验过程更省时、结果更准确、人力成本更低。LabWorld 的核心研发合作伙伴是荷兰 Sioux Technologies 公司,同时 Sioux 也是荷兰光刻机巨头 ASML 以及美国 Thermo Fisher Scientific 高端仪器的核心和关键研发供应商之一。经过近几年对动物纤维识别市场需求的潜心调研,Labworld 于 2020 年推出了其最新的动物纤维智能检验设备 Fiber ID,一款基于机器视觉和深度学习原理,基于光学显微镜的羊毛羊绒自动数量、质量检测设备,目前 Fiber ID 正在国内各大羊毛羊绒生产商处(例如鄂尔多斯)进行最终测试,得到了非常优异的结果与正面的反馈。现在我们正在寻找杰出的人才以担任动物纤维智能检验设备的【机器视觉算法工程师】这一重要的角色! 希望这一角色进行机器学习、模式识别、深度学习算法开发,应用于Fiber ID图像识别和分类;满足纤维检测、识别等视觉算法在纺织行业的应用和需求;助力产品的优化迭代和人工智能在纺织行业的深度应用!网站:www.labworld-scientific.com[b]公司介绍:[/b] 聚焦台式电镜,致力电镜普及为研发工作者赋能,让我们一起 Free to Achieve复纳科学仪器(上海)有限公司于2012年成立,为高校、科研院所、政府和企业提供荷兰飞纳Phenom(现所属Thermo Fisher Scientific 赛默飞世尔科技)台式扫描电子显微镜(SEM)。该产品技术先进,市场占有率达80%,目前在中国拥有1000多家用户。2017年起,复纳与荷兰 S...[url=https://www.instrument.com.cn/job/position-78514.html]查看全部[/url][align=center][img=,178,176]https://ng1.17img.cn/bbsfiles/images/2021/08/202108160948175602_3528_5026484_3.png!w178x176.jpg[/img][/align][align=center]扫描二维码,关注[b][color=#ff0000]“仪职派”[/color][/b]公众号[/align][align=center][b]即可获取高薪职位[/b][/align]
[u][color=red]智能视觉是区别于机器与机器人分界线,它好比是我们人类的眼睛与大脑部分,我们眼睛是接受外部映像,及时反应给大脑,而我们的大脑会对于得到的图像信息思考,做出处理方案(可能是纠正偏差)智能视觉是结合光 机 电 软 算五样技术一体化的,是人工智能的领域应用中最先端的环节,可达到更为高效率,高精度的生产,同时也赋予了更高商业价值。简单的说,没有智能视觉的机器人只能称之为机器。对于中低端制造,智能视觉不是必要技术,有会更好,没有也可以;但对于高端制造,智能视觉是必备技术。为什么呢?[/color][/u][color=#C00000]首先是产品质量,要保证质量,产品抽检是远远不能满足要求的,那么就需要全检,还需要规避人为因素的影响,只有智能视觉技术才能让全检变得经济可行;甚至比全检还要严格的是过程检验,对原材料和每道工序的半成品进行全检,不允许不合格品流入下一道工序(比如奔驰宝马的制作过程);所以为什么欧美日的产品普遍可靠性非常高,很大程度得益于智能视觉技术的应用[/color][color=#C00000]智能视觉使复杂制造成为可能[/color]央视的《大国工匠》中就有很多挑战人类极限的工艺,一方面这些工匠的精神值得钦佩,但另一方面这些依赖极少数人的工艺其实是我们国家工业体系的隐患。很多复杂工艺需要高度熟练的技工才能完成,用数控设备或者机器人都无法替代,原因是需要复杂的过程响应,需要经验上的范式判断。这种情况下要采用智能视觉才有可能实现人工替代。人类对于超过4个自由度的反馈和控制是无法实现的,而精密生产很多时候会超过这个数目,比如手机的贴合,比如半导体的[url=https://insevent.instrument.com.cn/t/Mp]气相[/url]沉积设备,需要同时观察与思考的装备才能胜任,只有采用了智能视觉技术的装备才有这样的能力。对已有的数控装备如机床和机器人进行智能视觉改造,才能适应复杂的制造。目前欧美日发达国家就是用智能视觉来升级现有的数控装备,这是高端制造的主流。柔性化是制造业的理想,是高效率与低成本的最佳结合。但它的首要敌人却是用来保证生产可靠性的工装夹具,智能视觉为提高设备通用性和减少工装夹具带来了可能;它是混线生产的必备技术,对流过来的产品进行识别并自动进行生产程序的快速切换(比如老坛酸菜面和红烧牛肉面)。[color=#C00000]现在我国机器人采购量已经占据全球的四分之一,智能视觉与机器人本体采购额之比,美国要超过67%,德国超过34%,日本作为占据全球机器人生产一半的比例,其智能视觉的投入还比机器人略多,可以看出,欧美日的高端制造业,对智能视觉的投入要大于对机器人本体的投入,这是高端制造业的特点,从这幅图看到我们国家离高端制造业差距还很大。[/color][color=#C00000] [/color][color=#C00000]他们的大型制造业公司都有智能视觉部门,不一定有机器人部门,也不一定有自动化部门,但基本都有视觉部门;[/color][color=#C00000]他们的智能视觉部门基本都以实验室的形式存在,而且是设置在生产线现场附近,持续研究智能视觉技术与本行业进行结合,以对制造工艺进行升级;[/color][color=#C00000]这是一个长期积累的过程,为什么很多国外的制造技术包括装备能够一代代地叠加和升级下去,和设置智能视觉实验室有很大关系;[/color][color=#0070C0]覆盖范围[/color][color=#0070C0]中国的智能视觉最先发展的地方是珠三角和长三角。外企(包括台企),促进了很多视觉公司的发展。其业务模式基本是外资公司提出准确的需求,国内视觉公司想办法完成。这看似好像没有问题,但真正的knowhow实际上是掌握在外资公司,因为别人总部有视觉部门,找国内的视觉公司是为了降低成本。[/color][color=#0070C0]近几年,外资投资剧降,但国内的民企和国企由于产业转型的刚需,对视觉的需求呈井喷状态,但这个时候问题来了,我们国内的这些企业对智能视觉基本处于摸着石头过河的状态,同时,国内的视觉公司普遍处于碎片化的生存状态,就会造成“懂工艺的不懂视觉,懂视觉的不懂工艺”的现状,造成视觉项目成功率不高、周期过长这个很显著的问题。其主要矛盾是企业缺乏一个将视觉与工艺相结合的解决knowhow问题的智能视觉实验室。[/color][color=#0070C0]如果我们的企业都像国外每个企业都自己来建实验室,那么起点太低,周期就太长,资源就太分散,无法实现快速超越;[/color][color=#0070C0]所以中科蓝海智能实验室专门针对产业密集的区域建立一小时服务圈来解决这个问题,建立智能视觉实验室是实验区域产业快速升级的不二法门。[/color][color=#767171]实验室服务[/color][color=#767171]我们的优势在光和算,机电软就外包出去,我们有超过1000种组件,有10000多份的视觉建模的案例,超过100位的资深智能专家(其中包括华南理工大学的光学教授)我们还有行业内最完备最专业的培训体系。我们连锁实验室设置在哪里,就会为当地建立超过基恩士和康耐视等国外巨头在中国分公司的技术水平的专攻产业升级的技术服务机构。这些分公司只存在上海北京,离产业一线很远。[/color][color=#767171] [/color][color=#767171]服务范围[/color][color=#767171]如果你有项目,可以找我们,如果你的产品里想加上视觉,可以找我们,如果你是视觉技术型公司,但缺少市场需求,可以找我们,如果你想对接视觉技术专家,或者想招募视觉人才,或者想对技术团队进行视觉技术培训,都可以找我们,如果你想发掘自身行业是否有跨界的创新,也可以找我们,把视觉应用到不同的行业去,今天讲了很多制造业,其实除了制造,在其他领域视觉也有非常巨大的应用空间。[/color][color=#767171]公司的服务体系包含两种,一种是基本服务,一种是增值服务。 [/color][color=#767171]基本服务:就是提供智能视觉方案,可以成为我们的会员,每年5万元,不限次数的方案,对于装备商很划算,一个经验一般的视觉工程师的年薪都不止10万了;如果不是会员,也可以单次。[/color][color=#767171]而增值服务就很丰富了,有: 技术转让,软件服务,技术入股,原始创新,样机开发,联合共建(中科院与国内知名企业联合视觉技术开发实际工作的生产问题)等。[/color][color=#767171]中国的智能视觉最先发展的地方是珠三角和长三角。OEM出口和外企,促进了很多视觉公司的发展[/color][color=#767171]服务对象;[/color][color=#767171]制造商(机器换人)[/color][color=#767171]自主品牌提升(质量支撑)[/color][color=#767171]装备商(成为智能装备商)[/color][color=#767171]行业(智能化)[/color][color=#767171] [/color]远心光学系统是指:主光线平行光轴离开的光学系统。通过光学系统对物品成像测物品的长度,精确调焦可以精确测量。但如调焦不准,像面与分划板不重合,产生视差。应用:定位和非接触测量贴合视觉定位系统:触摸屏生产需要将两块玻璃面板用胶水精确贴合,要求胶水要溢满全玻璃面且无气泡,上下玻璃面板不能偏差。目前的触摸屏在大尺寸(5-12寸)制造时,容易产生气泡、对位精度差,生产效率低。该技术货架实现了四路视频信号的实时采集,并通过图像处理技术实时跟踪靶标位置,同时显示定位指示信息并输出靶标位置给PLC或上位机,实现贴合机的智能定位功能。应用:UVW视觉对位和真空贴合(手机屏幕,底板都是运用视觉贴合系统)为什么基恩士那么强,基恩士的产品都牛逼到那么没有朋友,因为基恩士背后站着整个日本最强大的光电测控产业力量,基恩士本身并不大,只有几千人,但其背后产业链有数万名研发工程师,他们不是一个人在战斗,是日本技术的抱团。康耐视、mVTECh、DALSA,这些巨头他们都不是自己在战斗,这些公司其实都是一个平台,一个有强大竞争力的平台都是让技术团队保持专注,在技术上不断打造神器级产品,新技术一诞生马上就能最快抵达一线现场,就能最大程度地应用开来,这才是一个好的技术平台。
近日,教育部公布2023年度普通高等学校本科专业备案和审批结果,并发布2024年普通高等学校本科专业目录。此次备案、审批和调整的专业,将列入相关高校2024年本科招生计划。本网从哈尔滨工业大学获悉,[b]哈尔滨工业大学新增审批专业2个,其中智能视觉工程专业是面向国家战略和区域发展急需首次设立并列入本科专业目录,哈尔滨工业大学成为该专业唯一布点高校。[/b]智能视觉工程作为教育部支持高校开设的24种新专业之一,将聚焦科学前沿、关键技术及工程应用领域,深化“四新”建设,立足航天、服务国防,面向国际学术前沿及国家重大战略需求,培养扎实掌握智能视觉工程基础理论及专业知识,具备工程实践创新能力、组织领导能力及团队协作精神,拥有创新意识和国际视野,能够引领智能视觉工程相关领域持续发展的“空间+光学+信息+智能”复合型拔尖创新人才。[align=center][img=图片,800,1338]https://img1.17img.cn/17img/images/202403/uepic/e009ea1d-85c8-4d81-afac-e4936f8406c7.jpg[/img][/align][来源:仪器信息网] 未经授权不得转载[align=right][/align]
《产品外观缺陷机器视觉在线检测技术及设备开发》一文由合肥工业大学仪器科学与光电工程学院卢荣胜教授投稿分享,包括自序、研究背景、典型系统组成、成像技术及实现策略、关键核心单元部件、缺陷识别与分类、结束语、致谢几个部分。由于篇幅较长分为四篇发布,以下为第一部分:自序、研究背景、典型系统组成。[b]1.自序[/b]本人1985年大学毕业后在量仪厂从事量具、刃具、工装、专机与机加工工艺开发等技术工作,于1992年从师费业泰教授攻读硕士与博士学位,从事精密机械热变形误差、精密仪器精度理论方面研究, 1998年末博士毕业后又拜师天津大学叶声华教授,从事机器视觉在线检测方面的博士后研究,研究方向随之聚焦于机器视觉与光学精密测量领域。之后在香港城市大学、英国帝国理工学院和哈德斯菲尔德大学进行了为期6年的三维机器视觉、自动光学检测和光学测量技术研发工作,于2006年5月返回母校合肥工业大学任教。回国后继续从事机器视觉与光学测量方面的研究,坚持面向平板显示、新能源、软性电路板、半导体等先进制造产业,注重技术的应用开发。先后主持了国家自然科学基金项目3项、863专项1项、国家科技支撑项目1项、国家重大科学仪器设备开发专项1项、国家重点研发课题1项、以及其它省部级项目和产学研合作项目10余项,在机器视觉与光学测量领域已培养硕士和博士研究生100余人。鉴于在机器视觉技术研究及应用开发方面20余年的研究积累,2021年无锡市锡山区政府与我们科研团队合作,联合创立了一个新型科技研发机构——无锡维度机器视觉产业技术研究院,采用实体化运营模式,面向先进制造产业链,从事机器视觉与光学精密测量方面产业共性关键技术研究与产业化开发。研究内容与产业化业务范围涉及机器视觉缺陷在线检测、三维机器视觉精密测量、机器人视觉引导、半导体检测、机器视觉关键零部件开发等。开发的视觉系统与仪器已经在平板显示、光伏、锂电池、软性电路板、半导体等行业得到成功应用。鉴于篇幅问题,本文重点聚焦于产品外观缺陷视觉在线检测技术,归纳了我20多年来在这些方面的科学研究与产业化开发的进展情况与心得体会。[b]2.研究背景[/b]在产品制造过程中,由于生产环境不理想、制造工艺不规范等各种原因,零部件和产品外观难免会含有多种缺陷,如印制电路板上出现孔位、划伤、断路、短路和污染,液晶面板的基板玻璃和滤光片表面含有针孔、划痕、颗粒,带钢表面产生裂纹、辊印、孔洞和麻点,铁路钢轨出现凹坑、鼓包、划痕、擦伤、色斑和锈蚀,等等。这些缺陷不仅影响产品外观,更重要的是影响产品性能,严重时甚至危害生命安全,对用户造成巨大经济损失,因此,现代制造业对产品的表面质量控制非常重视。产品外观缺陷在线检测最传统的方法就是采用人工目视检测法,目前高端制造工厂大部分都采用自动化生产,但人工目视检测岗位仍占据工厂整体人员的15%-30%。鉴于人工目视检测存在对人眼伤害大、主观性强、准确率低、不确定性大、易产生歧义和效率低下等缺点,已很难满足现代工业对产品质量及外观越来越高的严格要求。随着电子技术、图像传感技术和计算机技术的快速发展,利用基于图像传感技术的视觉在线检测方法已逐渐成为外观缺陷检测的重要手段,因为这种方法具有自动化、非接触、速度快、准确度高等优点。目前,外观缺陷视觉在线检测技术已经广泛应用于工业、农业、生物医疗等行业,尤其在现代制造业,如平板显示、光伏、锂电池、半导体、汽车、3C电子(计算机、通讯和消费电子产品)等领域,对能够实现机器换人的外观缺陷视觉检测技术需求越来越旺盛。[b]3.典型系统组成[/b]产品外观缺陷机器视觉检测是基于人眼视觉成像与人脑智能判断的原理,采用图像传感技术获取被测对象的信息,通过数字图像处理增强缺陷目标特征,再通过Blob(Binary large object)分析、模板匹配或深度学习等算法从背景图像中提取缺陷特征信息,并进行分类与表征。在工业应用领域,外观缺陷视觉检测系统实际上是一种智能化的数字成像与处理系统,即采用各种成像技术(如光学成像)模拟人眼的视觉成像功能,用计算机处理系统代替人脑执行实时图像处理、特征识别与分类等任务,最后把结果反馈给执行机构,代替人手进行操作,执行产品的分类、分组或分选、生产过程中的质量控制等任务。[align=center][img=image.png]https://img1.17img.cn/17img/images/202401/uepic/c509e9d3-5eca-4ea9-bd0c-a80e2803ce60.jpg[/img][/align][align=center][size=14px][color=#595959](左)6代线液晶阵列和彩色滤光片缺陷检测仪 (中)8.5代线玻璃基板缺陷检测仪 (右)ITO导电膜表面缺陷检测仪[/color][/size][/align][size=14px][color=#595959][/color][/size][align=center][color=#595959]图 1 高世代液晶面板关键工艺节点缺陷视觉在线检测系统[/color][/align][size=14px][color=#595959][/color][/size][align=center][size=14px][color=#595959][img=图片1.png,600,225]https://img1.17img.cn/17img/images/202401/uepic/e99b0f18-c0ae-488a-955c-65c5a97b577a.jpg[/img][/color][/size][/align][align=center][color=#595959]图 2 表面缺陷视觉在线检测系统组成原理图[/color][/align]图1为我们在国家重大科学仪器设备开发专项的资助下,针对6代线和8.5代线液晶面板显示器制程中关键工艺节点,开发的三种缺陷视觉在线检测系统。该系统能很好地揭示一个视觉在线检测系统的各个组成部分、关键技术难点,以及所需的关键零部件。主要技术参数为:待测幅面大小≤1800x2200mm, 快速发现缺陷分辨率10μm, 复检显微分辨率0.5μm, 并行图像处理与缺陷识别系统采用CPU+FPA+GPU 主从分布式异构并行处理架构,检测时间节拍20s。系统组成与关键零部件单元可用图2示意图来清晰地描述,它由精密传输机构、光源、相机阵列、显微复检、并行处理、控制、主控计算机、服务器等单元模块,以及与工厂数据中心互联的工业局域网组成。图 3 展示了我们开发的手机液晶显示屏背光源模组缺陷转盘式多工位视觉在线检测系统的结构组成,该检测系统包括自动上料、编码、对准、检测、分选、返修识别等几个部分。[align=center][img=image.png]https://img1.17img.cn/17img/images/202401/uepic/b1265c69-0573-4f14-8828-e4c9976ccdcc.jpg[/img][/align][align=center][color=#595959]图 3 背光源模组在线自动光学检测系统[/color][/align][b]3.1 自动上料机构[/b]自动上料机构包括装配线上传输来的背光源模组位姿探测、电动与气动机构抓取、位置校正、送料等部分组成。工作原理如下:1. 在装配线传输带工位(1)的上方放入一个监视相机,当前道工序组装系统装配好背光源模组传输到工位(1)后,监视相机拾取到有待测模组时,计算模组在工位(1)处的位置与模组姿态信息,并发出工作同步指令给后续上料与检测系统。2. 监视相机发出工作同步指令后,气动与电动缸组成的送料系统把工位(1)处的背光源模组从传输带上吸起来,然后在气动滑台的带动下,把工位(1)处的背光源模组搬运到工位(2)处。在放到工位(2)上之前,计算机根据工位(1)上方的相机拍摄到的模组位置与姿态,发出指令给真空抓取吸盘角度校正电缸,初步校正背光源模组在空间的角度。当背光源模组运送到工位(2)后,模组在工位(2)处由4个气动滑缸从四边向中间对中,校正模组的位置,然后背光源模组下方的相机,对模组成像,识别待检背光源模组喷码序列号,作为有缺陷模组在返修过程中,从缺陷数据库中自动调出缺陷信息,指导返修任务。3. 在工位(1)处吸盘抓取背光源模组的同时,右边的吸盘在工位(2)处把已经校正好的模组吸起来,然后在气动滑台的带动下,把校正后的模组输送检测转盘工位(3)处。至此,一个上料循环完成。[b]3.2 检测机构[/b]检测机构由间隙转动工位转盘、上料位置对准探测、异常检测、画面检测和外观检测工位组成。工作原理如下:1. 背光源模组被自动送料机构传输到工位(3)后,转盘在控制系统的控制下,转到工位(4)。在工位(4)的上方安装一个相机,检测背光源模组定位是否正常,模组LED灯工作是否正常,并把信息传给主控计算机。如果一切正常,则后续检测工位按预定的方案进行检测;如果不正常,后续检测对该模组不检测,然后传送到工位(9),由分选机构抓取,传送到不良品传输带上。2. 当模组转到工位(5)~(8)处后,缺陷扫描成像系统对画面缺陷进行扫描检测,缺陷扫描成像系统由高速扫描相机、一维滑动台、光栅、伺服系统、调整机构组成。由于外观检测项目较多,一个工位难以不够,故把工位(7)和(8)两个工位作为外观检测机构。[b]3.3 分选机构[/b]分选机构由良品与不良品气动抓取机构、间隙运动传输带组成。结构布局参看图 3 所示,其工作原理如下:1. 如图 3 所示,画面(外观、异常等)缺陷检测完毕后,模组继续向下道工位转动,当模组运动到工位(9)后:分选机构左边的气动吸盘抓取工位(9)上的模组,传输到工位(11)处。2. 如果该模组是不良品,在分选机构向工位(9)移动的过程中,不良品传输带向前移动一个工位,把工位(11)清空,等待放置下个模组。3. 如果是良品,在下一个时刻分选机构抓取工位(9)上的模组时,右边的吸盘同时抓取工位(11)上的模组,在分选机构左吸盘把模组放到工位(11)处时,右吸盘把良品模组放置到良品传输带上工位(12)处,然后良品传输带向前移动一个工位,清空工位(12)等待放置下个模组。传输带之所以作间隙运动,一方面可以节省空间,另一方面考虑到不良品只是少数,这样可以让不良品按顺序一个一个经凑地排列在传输带上,不需要有人监视,返修人员只要传输带上放满了不良品后取走返修。[b]3.4 复检与不良品返修[/b]对于检测到的不良品,再采用人工目视复检,并对不良品进行返修。在返修工作台上放置一个电脑,并安装一台成像系统,拾取不良品背面的编码。返修显示电脑通过工业以太网与缺陷数据库服务器相连,相机在电脑的控制下,获得带返修的不良品编码后,根据编码从服务器中调用缺陷信息,显示在屏幕上,导引返修人员对不良品进行合理的返修。[来源:仪器信息网] 未经授权不得转载[align=right][/align]
1 机器视觉的研究内容 人们从外界环境获取的信息中,80 %来自于视觉,其它来自于触觉、听觉、嗅觉等感觉器官。当人们的眼睛从自己周围的环境获取大量信息,并传入大脑后,由大脑根据知识或经验对信息进行加工、推理等处理工作,最后识别、理解周围环境,包括环境内的对象物,如运动物体与物体间的相对位置、形状、大小、颜色、纹理、运动还是静止等。机器视觉就是用计算机模拟人眼的视觉功能,从图像或图像序列中提取信息,对客观世界的三维景物和物体进行形态和运动识别。机器视觉研究的基本目的之一就是要寻找人类视觉规律,从而开发出从图像输入到自然景物分析的图像理解系统。对于机器视觉系统来说,输入是表示三维景物投影的灰度阵列(可以有若干个输入阵列) ,这些阵列可提供从不同方向、不同视角、不同时刻得到的信息。希望的输出是对图像所代表景物的符号描述。通常这些描述是关于物体的类别和物体间的关系,但也可能包括如表面空间结构、表面物理特性(形状、纹理、颜色、材料) 、阴影以及光源位置等信息。目前许多机器视觉专家都是在马尔(Marr) 创立的视觉计算理论框架下求索。2 机器视觉与人类视觉的差异 对于人的视觉来说,由于人的大脑和神经的高度发展,其目标识别能力很强。但是,人的视觉也同样存在障碍,例如,即使具有一双敏锐视觉和极为高度发达头脑的人,一旦置于某种特殊环境(即使曾经具备一定的检验知识) ,其目标识别能力也会急剧下降。事实上人们在这种环境下,面对简单物体时,仍然可以有效而简便地识别,而在这种情况下面对复杂目标或特殊背景时,才会在视觉功能上发生障碍,两者共同的结果是导致目标识别的有效性和可靠性的大幅度下降。将人的视觉引入机器视觉中,机器视觉也存在着这样的障碍。它主要表现在3 个方面:1) 如何准确、高速(实时) 地识别出目标;2) 如何有效地增大存储容量,以便容纳足够细节的目标图像;3) 如何有效地构造和组织出可靠的识别算法,并且顺利地实现。前两者相当于人的大脑这样的物质基础,这期待着高速的阵列处理单元以及算法(如神经网络 、分维算法 、小波变换 等算法) 的新突破,用极少的计算量以及高度地并行性实现功能。3 机器视觉检测中几种基本技术311 训练系统先将参考织物或图片的图像输入微机图像处理系统,选择并计算可表示图像特征的参数,以确定疵点或图形的分类指标,如灰度级,疵点或图形的面积,疵点在经纬向尺寸、形态等,是系统获得这些指标的标准。然后将所测试的织物输入,计算其各点灰度值及一些需比较的特征参数与标准比较,确定疵点或图形分类。312 样板匹配求得某一图像哪一部分对应另一图像的哪一部分是或比较2 幅图像的相似度时,采用样板样匹配的方法。一般将样板t ( x , y) ,令其中心与图像的一点( i , j) 重合,逐点检测,找出差距小于阈值的部位,定位相同或相似的,大于阈值的部位,定为不同或不相似的点。313 二值化处理为将图形与背景分离,根据灰度值确定一定灰度域值。将灰度值大于此域的点置为1 ,小于此域值的点为0。使图像变为黑白二值图像,便于图形特征测量和结构分析描述。314 腐蚀和膨胀腐蚀可使轮廓边界收缩,膨胀可使轮廓边界膨胀,腐蚀和膨胀的不同组合,不同处理次数,可以得到不同的图形效果,如使图像中的小孔使之检测出来或使之消除。315 细线化对给定的图形使之细化,从而提取线宽为1 的中心线的操作。在细线化中,不改变原图的连接性,使图形骨架轮廓结构清晰,便于计算,不会因边界上的小凹凸而产生毛刺。在计算非织造布纤维取向度是用此法处理。316 纹理分析在分析绉组织的绉效果或羊绒的鳞片结构时,须用纹理分析的方法。纹理分析内容包括:纹理特征的计算(如直方图特征、灰度共生矩阵、傅立叶特征) 微粒区域的分割与纹理边缘的检测。 “具体可以解决的问题如: 1,纺织布料识别与质量评定、 2,织物表面绒毛鉴定、 3,织物的反射特性、 4,合成纱线横截面分析、 5,纱线结构分析等。 6,此外还可用于织物组织设计、花型纹板、棉粒检测、分析纱线表面摩擦等。
各位大神们,请问有什么好的机器视觉分享吗?最近比较关注机器视觉这方面,毕竟现在都在喊着机器换人,那只能往机器人和机器视觉这块靠拢了,在高交会上看到有一个东莞蓝海机器视觉的培训,看宣传教学设备还挺专业齐全的,不知道是否可以过去学习?或者 是有机器视觉方面的大神,愿意指导我的话,不胜感激,也欢迎想学机器视觉的朋友们跟我一起组团学习,交流:周:一五0一二八三四五六三
机器视觉就是用利用机器代替人眼和大脑,来做判断、测量和识别。根据 生产线的要求,其特点是高速、非接触式、客观和精确。机器视觉技术在 行业的应用有以下几个方面:包装行业中机器视觉系统在现代包装行业中的应用 QCROBOT, 在现代工业自动化生产中,涉及到各种各样的检查、测量和零件识别应用,例如汽车零配件尺寸检查和自动装配的完整性检查,电子装配线的元件自动定位,饮料瓶盖的印刷质量检查,产品包装上的条码和字符识别等。 这类应用的共同特点是连续大批量生产、对外观质量的要求非常高。通常这种带有高度重复性和智能性的工作只能靠人工检测来完成,我们经常在一些工厂的现代化流水线后面看到数以百计甚至逾千的检测工人来执行这道工序,在给工厂增加巨大的人工成本和管理成本的同时,仍然不能保证100%的检验合格率(即“零缺陷”),而当今企业之间的竞争,已经不允许哪怕是0.1%的缺陷存在。有些时候,如微小尺寸的精确快速测量,形状匹配,颜色辨识等,用人眼根本无法连续稳定地进行,其它物理量传感器也难有用武之地。这时,人们开始考虑把计算机的快速性、可靠性、结果的可重复性,与人类视觉的高度智能化和抽象能力相结合,由此产生了机器视觉的概念。 一般地说,机器视觉就是用机器代替人眼来做测量和判断。 目前国内已经出现了像QCROBOT这样的具备运动控制,机器视觉,网络通讯几方面技术背景的系统集成商,他们专业化的技术支持和服务能力使之成为原始供应商和最终用户之间的桥梁。而对包装企业来说,意识到技术发展的趋势并首先付诸实施者无疑将走在竞争的前列。
众所周知,药品关系到人类的生命健康,如果因为药品的质量问题而对人的生命造成威胁,这将是一个大的灾难。因而各药品生产厂家,尤其是世界知名大厂对药品的整个生产过程甚至后段的包装都给与了非常大的重视。QCROBOT在全球范围内与许多世界知名药厂都有着良好的合作,无论是药品的泡罩包装、液体灌装,还是后段的压盖、贴标、喷码,以及最后的装盒检测,邦纳公司都可以提供完整的解决方案。下面仅就QCROBOT系列视觉传感器在液体灌装检测和瓶装药品的贴标及喷码检测做简单介绍,希望对大家能有所帮助。 1.1 机器视觉瓶口破损检测罐装后瓶口是否有破损?这关系到药液中是否会混入玻璃碎屑。QCROBOT视觉传感器安装在药液罐装工序后,通过图形匹配工具来判断瓶口是否破损。在检测之前,先通过QCROBOT的视觉软件让传感器“看”一下正常的瓶口特征,视觉传感器会记住此特征,当罐装好的瓶经过传感器镜头前面时,传感器会捕捉当前的瓶口特征,与其所记忆的原瓶口特征进行比较,看是否一致,如果不同,传感器会发出信号以让剔除机构将此瓶剔除。 1.2 机器视觉灌封质量检测在此生产线我们关心的另一个问题是压盖后盖子是否压装到位?药液罐装的是否够量?以确保瓶子封装完好,保证瓶内的真空度,另外确保药量正确。QCROBOT视觉传感器安装在压盖工艺后,通过线性工具来测量瓶盖及液位在Y轴方向上的变化来判断瓶盖是否安装到位以及药量是否正确(见图4-图8)。这里我们是通过测量瓶盖与瓶口之间的缝隙来判断瓶盖是否安装到位,通过测量液面与瓶口的距离来判断液位的高低,均是相对位置的测量,因而不会受瓶子在传送带上微弱跳动的影响。经过此道检测,能确保瓶盖未安装到位和药液不够的药瓶全部被剔除出去。 1.3 机器视觉缺瓶检测出厂时的药瓶缺失检测。一般瓶装药在出厂时都是若干瓶药装在一个较大的包装内,此时QCROBOT视觉传感器能可靠检测出每个包装内是否缺少药瓶,以避免因此而造成的对药品生产厂家信誉的影响。2 视觉传感器在贴标和喷码方面的应用作为通用性非常强的一款传感器,QCROBOT视觉传感器在制药行业的贴标和喷码方面也有大量的非常可靠的应用,同时也能可靠读取标签上的1D和2D条码。3 结束语上面仅仅列出了QCROBOT视觉传感器在制药行业中的部分应用,其实在泡罩包装检测/注射器的检测/IV包的检测等诸多制药行业的检测中,QCROBOT的视觉传感器都有非常成熟的应用。操作简便,性价比高是QCROBOT视觉传感器最突出的特点。(www.QCROBOT.com)(TEL:13621218345 李生)
天平使用着突然秤盘跳起来,然后打开天平把支撑杆重新装好,却把水平视觉误差破坏了,上下左右都是不同的数据,怎么办??[img]https://ng1.17img.cn/bbsfiles/images/2020/08/202008111651097135_2308_5001089_3.png[/img]
二○○八年全国优秀博士学位论文《计算机视觉、电子鼻、[url=https://insevent.instrument.com.cn/t/1p][color=#3333ff]近红外光谱[/color][/url]三技术融合的苹果品质检测研究》作者:江苏大学 食品科学与工程邹小波 万分感谢!!!
在影响颜色视觉因素的控制中,有以下几个因素:1. 年龄;2.疾病,如糖尿病;3.情绪、劳累、紧张、宿醉;4.药物,饮酒,吸烟;5.人种;在这几个因素中1-4项好理解,可是年龄和人种如何控制?
食品包装存在缺陷的后果很严重,会导致召回整批的商业制品。即使在出错率能控制在“千分之几的范围”内,零误差检测也占有明显优势。在使用QCROBOT提供的视觉系统之前,SäntisJ.Göldi公司的质量控制依赖于随机产品抽样检测。尽管这种检测方式能够探测到生产区域的缺陷品,但每个缺陷产品的外观是不可能完全相同的。这就是为什么这家位于瑞士的公司倾向于采用QCROBOT相机进行最后质量检查的原因。其视觉系统由机器人及定位系统以及视觉系统解决方案专业公司QCROBOT安装提供。 SäntisJ.Göldi公司是一家采用多种加工方法的塑料包装产品制造商,例如喷射模塑法、挤压气泡法、两步PET气泡法、薄膜挤出法和深拉制法。作为一家为食品行业提供具有氧气阻隔性能(共聚物)的密封层薄膜的制造商,该公司还对其客户的产品负责。作为世界上所有公司的代表,SäntisJ.Göldi公司为包装肉和香肠生产多层薄膜。所使用的关键材料是聚丙烯。氧气和香肠可以一起相处的时间很短暂,然后香肠的肉开始腐烂。这是为什么SäntisJ.Göldi公司通过这种密封层薄膜防止其塑料包装物与氧气接触的原因之一。7层薄膜的挤压很复杂,因此可能发生质量检测的问题。QCROBOT相机有助于弥补质量检测过程中的任何差错。 QCROBOT视觉系统正在探测到盒内不规则阴影的任何瑕疵 生产基于三个基本的生产阶段:多层薄膜的挤压、根据各自塑料包装物形状的深拉制法以及最后的印刷和包装。在薄膜制造过程中出错误源只能在一定程度上予以排除。在挤出过程中,材料流水线中总是会发生凹陷,这反过来会引起烧焦。在一定情况下,烧焦的材料元件会在薄膜下形成气泡,这在随后的深拉过程中会导致材料爆裂。在深拉过程中也不能完全地排除出错误源。然后薄膜会显示出无需的褶皱,导致过高的温度环境或者错误的压印,反过来造成一定区域上的材料变薄。 高速运转的生产线SäntisJ.Göldi公司的质量保证专家面临如何避免孔洞和杂质从薄膜传送到成品中的问题。要简单地扔掉有瑕疵的薄膜的最大部分是不可能的。即使薄膜上的缺陷被标示出来,缺陷区域也必须从薄膜上切割掉。过量的材料消耗和时间损失的成本可能过高。这就是为什么开发一个不损害生产过程并且使用尽可能少的受损材料的解决方案的原因。缺陷的薄膜和无损的材料一起经过深拉系统和机器运行到胶版印刷区域。在胶版印刷之后,每分钟多达260个产品沿着传送带运行到堆垛站点。系统出口处的QCROBOT相机检查塑料包装物内部的坚固性、杂质和材料瑕疵。水平堆垛之前,在下面安装有QCROBOT相机的玻璃平面上滑动,并有红色LED灯照射在塑料包装盒之上。QCROBOT可以探测到盒内不规则阴影的任何瑕疵。太亮的区域表明材料厚度不足,太黑的区域指出材料杂质和褶皱。在数秒间便可识别出缺陷产品,并且按照压缩空气的方式进行分类。QCROBOT相机向Säntis的客户提供关于错误类型和错误率的清楚结果,同时也保证了产品无误。在当前的质量检查中,现在可以探测到此前可能没有注意到但现在使用视觉技术可以迅速地解决的错误。在新的错误图案出现时,Säntis可以拍下包装盒的内部照片并且将图形材料提交给Credimex。在Credimex编制新的应用软件并且发送给Säntis执行工作。这样的简单性和高效率使得成本节约性检查系统得以执行,优化了产品质量,并且加强了该公司在持续改进方面的表现。QCROBOT可提供此机器视觉模块及工程解决方案。
【创意摄影】视觉冲击,火柴的艺术~~http://ww4.sinaimg.cn/bmiddle/6117d2a0jw1dobpuv9c3aj.jpg

[font='微软雅黑','sans-serif']机器人自动点胶机中机器视觉主要功能有哪些?[/font][font='微软雅黑','sans-serif']点胶机普遍应用于工业生产中的各个行业,例如:精密机械、电子装置的条纹印刷和密封。电子元件的粘贴,以及IC装封的灌胶等。随着芯片和封装尺寸的减小,高精度、高一致性、高可靠性、高速度、微体积的点胶机技术及装备得到迅速发展。密封条自动成型机-点胶机是一个复杂系统。需要对点胶流量和点胶位置进行精确控制,影响点胶精度的主要因素有产品尺寸精度、夹具设计、点胶方式和控制方式等。机器视觉以其检测精度高、动态响应快、可连续工作等优点。广泛应用于电子封装行业的诸多领域。[/font][font='微软雅黑','sans-serif']主流的非接触式点胶技术采用机器视觉系统辅助完成点胶,过程的闭环控制,实现高精度、高频率的自动定位点胶技术中的机器视觉主要功能有:[/font][font='微软雅黑','sans-serif']1.[/font][font='微软雅黑','sans-serif']在点胶工艺前,对目标产品快速确定点胶位置,自动生成点胶路径[/font][font='微软雅黑','sans-serif']2.[/font][font='微软雅黑','sans-serif']在点胶工艺前,对涂覆的胶点进行观察和测量、评估直径或体积的一致性[/font][font='微软雅黑','sans-serif']3.[/font][font='微软雅黑','sans-serif']生成点胶路径快速捕捉到点胶位置,进行点胶,无论产品怎么摆放系统能快速识别到产品胶点上述功能可以在同一视觉系统中加以实现。[/font][font='微软雅黑','sans-serif']其中胶点检测技术发展已比较为成熟,不少文献对此给出了较为完整的解决方案,市场上也已有类似产品出现。对于点胶位置的定位,由于目标产品的多样性和工艺条件的不确定性等因素,业内有着多种个性化的解决方案。针对荧光胶模组点胶工艺的具体应用,通过安装于点胶机Z轴上的视觉系统,实现了对点胶位置的在线检测。[/font][font='微软雅黑','sans-serif'][img=,500,500]https://ng1.17img.cn/bbsfiles/images/2021/06/202106151003230165_9263_4017671_3.jpg!w500x500.jpg[/img][/font]
污点现在检测设备Techmach视觉检测系统(厂家直供)
食品包装存在缺陷的后果很严重,会导致召回整批的商业制品。即使在出错率能控制在“千分之几的范围”内,零误差检测也占有明显优势。在使用QCROBOT提供的视觉系统之前,SäntisJ.Göldi公司的质量控制依赖于随机产品抽样检测。尽管这种检测方式能够探测到生产区域的缺陷品,但每个缺陷产品的外观是不可能完全相同的。这就是为什么这家位于瑞士的公司倾向于采用QCROBOT相机进行最后质量检查的原因。其视觉系统由机器人及定位系统以及视觉系统解决方案专业公司QCROBOT安装提供。 SäntisJ.Göldi公司是一家采用多种加工方法的塑料包装产品制造商,例如喷射模塑法、挤压气泡法、两步PET气泡法、薄膜挤出法和深拉制法。作为一家为食品行业提供具有氧气阻隔性能(共聚物)的密封层薄膜的制造商,该公司还对其客户的产品负责。作为世界上所有公司的代表,SäntisJ.Göldi公司为包装肉和香肠生产多层薄膜。所使用的关键材料是聚丙烯。氧气和香肠可以一起相处的时间很短暂,然后香肠的肉开始腐烂。这是为什么SäntisJ.Göldi公司通过这种密封层薄膜防止其塑料包装物与氧气接触的原因之一。7层薄膜的挤压很复杂,因此可能发生质量检测的问题。QCROBOT相机有助于弥补质量检测过程中的任何差错。 QCROBOT视觉系统正在探测到盒内不规则阴影的任何瑕疵 生产基于三个基本的生产阶段:多层薄膜的挤压、根据各自塑料包装物形状的深拉制法以及最后的印刷和包装。在薄膜制造过程中出错误源只能在一定程度上予以排除。在挤出过程中,材料流水线中总是会发生凹陷,这反过来会引起烧焦。在一定情况下,烧焦的材料元件会在薄膜下形成气泡,这在随后的深拉过程中会导致材料爆裂。在深拉过程中也不能完全地排除出错误源。然后薄膜会显示出无需的褶皱,导致过高的温度环境或者错误的压印,反过来造成一定区域上的材料变薄。 高速运转的生产线SäntisJ.Göldi公司的质量保证专家面临如何避免孔洞和杂质从薄膜传送到成品中的问题。要简单地扔掉有瑕疵的薄膜的最大部分是不可能的。即使薄膜上的缺陷被标示出来,缺陷区域也必须从薄膜上切割掉。过量的材料消耗和时间损失的成本可能过高。这就是为什么开发一个不损害生产过程并且使用尽可能少的受损材料的解决方案的原因。缺陷的薄膜和无损的材料一起经过深拉系统和机器运行到胶版印刷区域。在胶版印刷之后,每分钟多达260个产品沿着传送带运行到堆垛站点。系统出口处的QCROBOT相机检查塑料包装物内部的坚固性、杂质和材料瑕疵。水平堆垛之前,在下面安装有QCROBOT相机的玻璃平面上滑动,并有红色LED灯照射在塑料包装盒之上。QCROBOT可以探测到盒内不规则阴影的任何瑕疵。太亮的区域表明材料厚度不足,太黑的区域指出材料杂质和褶皱。在数秒间便可识别出缺陷产品,并且按照压缩空气的方式进行分类。QCROBOT相机向Säntis的客户提供关于错误类型和错误率的清楚结果,同时也保证了产品无误。在当前的质量检查中,现在可以探测到此前可能没有注意到但现在使用视觉技术可以迅速地解决的错误。在新的错误图案出现时,Säntis可以拍下包装盒的内部照片并且将图形材料提交给Credimex。在Credimex编制新的应用软件并且发送给Säntis执行工作。这样的简单性和高效率使得成本节约性检查系统得以执行,优化了产品质量,并且加强了该公司在持续改进方面的表现。
起毛起球测试中,视觉描述评级,这个大家用的多吗?怎么感觉每个人的评级偏差比较大?[img=,614,193]http://ng1.17img.cn/bbsfiles/images/2018/03/201803091125554460_7430_2154459_3.png!w614x193.jpg[/img]
人类有爱有恨,有欢喜有厌恶,儿童爱不释手的玩具可能被成人不屑一顾。然而,这种喜好并不是人类的专利,低等动物同样会有抉择。成语“飞蛾扑火”诠释了昆虫为求光明甚至不惜牺牲,然而,昆虫幼虫恰恰喜欢茫茫黑暗却往往不为人知。近日,中国科学院生物物理研究所研究员刘力、副研究员龚哲峰等初步揭示了果蝇幼虫中央脑的两对神经元足以调节果蝇幼虫对于不同光强条件的偏好行为的研究成果。这一成果日前在美国《科学》杂志在线发表。来自纽约大学的NinaVogt博士和Desplan博士对此给予了高度评价,认为这项发现“增进了人们对动物大脑解析视觉的理解”,同时也使人们“向全面理解环境和内在生理因素影响本能行为的神经基础迈进了一步”。成功,些许“运气”“这篇文章得以发表,我们运气不错。”龚哲峰这样强调。“运气”是从确定课题方向开始的。在国外时,龚哲峰就常常会想起一个有意思的现象:当很多人经历匆匆岁月,偶然邂逅少年时代的初恋情人时,却发现完全找不到之前的感觉。而这种变化的神经基础却并未被人所知。然而,它虽然是有趣的课题,但人脑的复杂性使这样的研究很难简单实现。一次意外发现却给了龚哲峰启示:果蝇的幼虫伴随着自身的发育,会从年幼时喜欢黑暗变得逐渐热爱光线充足的地方。这不正是与人类的偏好性类似的生物模型吗?龚哲峰深入思考后,毅然确定了自己回国后的研究方向。龚哲峰回到中科院生物物理所工作后,该项研究得到了课题组组长刘力的强力支持。于是龚哲峰着手订购了1000余个缺陷品系果蝇,希望能发现不怕光的果蝇幼虫,获得实验材料。订购来的果蝇要获得缺陷表型,必须经过进一步杂交,龚哲峰和合作者开始了上千次显微镜下的杂交、繁殖,上万次的筛选。在每天工作14小时以上、不间断杂交筛选大半年后,终于发现了不怕光的品系。“我们运气不错。本以为果蝇失去避光性就是成功,可就在筛选工作进行了一年多、即将结束的时候,我们居然发现了一个品系的果蝇幼虫喜欢光。”龚哲峰兴奋地说。这个发现让该品系的果蝇顿时成了“宝贝”。NP394神经元的失活,并不仅仅使得该品系的果蝇幼虫从“惧怕光”变得对光“无所谓”,而是180度的大转弯,直接“爱上光”了。接着,课题组研究人员证明了NP394神经元控制着果蝇避光/趋光的“开关”:抑制该神经元,即使年幼的幼虫也会变得“喜欢光”;激活该神经元,则年长的幼虫同样将变得“害怕光”。“我们通过分段表达绿色荧光蛋白,第一次在果蝇中成功检测到了该技术的应用,证明了PDF神经元和NP394神经元的上下游关系。”龚哲峰指出。要证明两个神经元之间的关系,首先要确定它们的突触距离是否足够近。而在果蝇不同的神经元中分段表达绿色荧光蛋白成了瓶颈。此时,国外的研究也首次报道在果蝇中应用了该项技术,和龚哲峰的体系颇有相似之处。“他们没有得到阳性结果,我们得到了。”龚哲峰平静地说。通过改造实验器材,他们在国内首次实现果蝇中功能钙成像技术的成功应用,佐证了两对神经元的上下游关系。凭借着四年多的“运气”,刘力、龚哲峰等最终发现并提出NP394神经元的开关作用,并首次将偏好行为神经元回路从第一级延伸到第三级神经元,得到了国际同行的认可和高度评价。“可能运气好吧。”回顾四年多来的艰辛付出,龚哲峰付之一笑,“这些结果还不足以阐述人类的喜好变化。不过,只要继续坚持做下去,它终会给我们带来惊喜。”果蝇,又见果蝇人们可能没有想到,嗡嗡作响、令人生厌的果蝇于20世纪初被遗传学大师摩尔带入实验室后,竟已成就了7位诺贝尔奖获得者。在中国,以果蝇为研究工具,神经生物学家们同样取得了令人关注的成果。被人称为“果蝇院士”的中科院院士郭爱克,是刘力和龚哲峰学生时代的共同导师。作为新中国第一位留德博士,郭爱克近年来已经连续3次在《科学》杂志上发表文章。2001年,郭爱克研究小组首次发现了果蝇具有简单抉择能力,并且“蘑菇体”参与其中;2005年,该小组继续深入“两难抉择”研究,发现了果蝇跨视觉和嗅觉记忆的“共赢机制”;2007年,他们则聚焦于面临冲突环境时果蝇价值抉择的神经环路机制。名师出高徒。刘力也曾两次在英国《自然》杂志发表文章。2006年,他在中科院生物物理所的研究小组从基因、细胞、脑结构以及行为等多个层面,第一次精确定位了果蝇视觉学习记忆的脑功能区——扇形体。这些喜欢环绕着腐败水果飞行的小家伙,为什么会被生命科学家宠爱至极,并且占据生命科学研究舞台百年之久呢?“果蝇是人类窥见自己复杂神经的一扇窗口。它结构简单,繁殖快速,易于改造,非常适宜做神经生物学的研究模型。”面对记者的疑问,龚哲峰道出了果蝇的妙处。果蝇容易饲养,平均一年30代的繁殖速度,使科学家们能够在较短的时间内培养出大量的特定种系。随着2000年果蝇基因组的测序完成,研究者更是可以准确、迅速地对其进行改造。此外,小小果蝇的神经系统和人类也颇具相似之处,在人类的大脑中,活跃着大约1000亿个神经元,而果蝇只相当于人类的万分之一。因此,果蝇也已成为研究神经结构和定位记忆方面最好的生物模型。物体进入人们的眼中,大脑会对图像分类后加以储存,从而构建出思维与情感,或者发出指令。那么,果蝇眼睛中的刺激传到脑中,又是如何学习和记忆的呢?在刘力的实验室里,记者见到了一套为果蝇量身打造的“飞行装置”。该装置可以呈现出不同的视觉图案——正T和倒T字母,主要作用是教导果蝇“学习”。果蝇在明亮的圆筒形空间向眼前的视觉目标飞去,如果它总是飞向倒T字母,电脑就会立即发出指令,烫它的屁股。慢慢地,果蝇学会了“吃一堑,长一智”,认识到倒T字母是危险的,而自觉地转向正T字母。通过这套设备,就可以模拟出果蝇的学习过程,建立视觉、神经和行为之间的动态神经回路。“总之,上述研究成果的获得,小家伙们功不可没。果蝇和人类大脑在基本功能上有着相似性,探究果蝇视觉行为的深入机理,对我们自己大脑的解读颇有启示。”龚哲峰说。(转自科学时报)
[b][font=宋体][color=black]【序号】:1[/color][/font][font='微软雅黑',sans-serif][color=black][/color][/font]【作者】:[size=16px][b][b][b]王雪 谢志江[/b][/b][/b][/size][/b][font=&]【题名】:[/font][b][b]大口径光学透镜表面疵病机器视觉检测技术研究[/b][/b][font=&]【期刊】:cnki[/font][b][color=#545454]【链接]: [url=https://kns.cnki.net/kcms/detail/detail.aspx?dbcode=CMFD&dbname=CMFD202101&filename=1021001205.nh&uniplatform=NZKPT&v=xYGHSdLttNdKdrQ4eSEtVhLFx0cYpkq8yjYDo-JSapNdufFHtF5fAnmFys_fHVpk]大口径光学透镜表面疵病机器视觉检测技术研究 - 中国知网 (cnki.net)[/url][/color][/b]
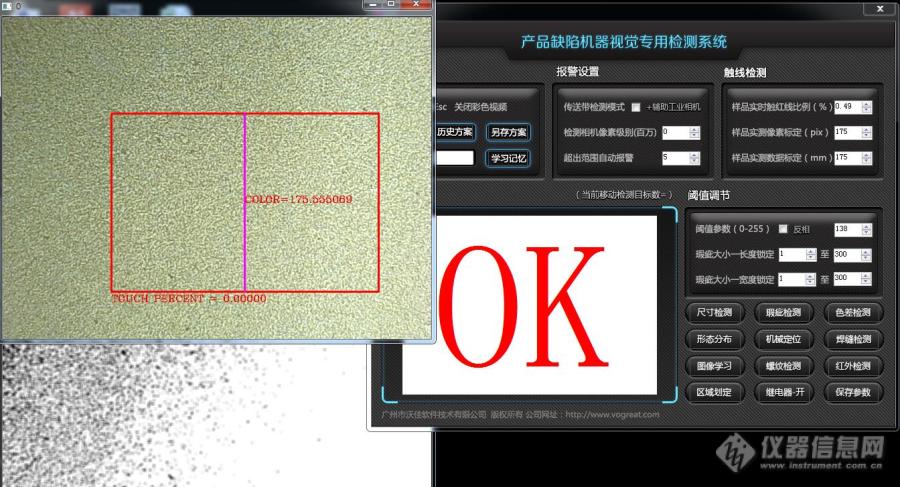
通过机器视觉检测面板外观颜色特征,标定合格品样本,设定报警范围,超出范围自动判定为NG,进而对产品进行分拣[img=,690,373]http://ng1.17img.cn/bbsfiles/images/2018/04/201804171140566678_4824_3199866_3.jpg!w690x373.jpg[/img][img=,690,372]http://ng1.17img.cn/bbsfiles/images/2018/04/201804171140581259_4596_3199866_3.jpg!w690x372.jpg[/img]分拣平台设计:[img=,690,484]http://ng1.17img.cn/bbsfiles/images/2018/04/201804171147101858_3924_3199866_3.jpg!w690x484.jpg[/img]产品坐标定位:[img=,690,350]http://ng1.17img.cn/bbsfiles/images/2018/04/201804171147115228_9656_3199866_3.jpg!w690x350.jpg[/img]元器件外观检测:[img=,690,368]http://ng1.17img.cn/bbsfiles/images/2018/04/201804171147123958_4855_3199866_3.jpg!w690x368.jpg[/img][img=,690,366]http://ng1.17img.cn/bbsfiles/images/2018/04/201804171147113769_7471_3199866_3.jpg!w690x366.jpg[/img]需要了解更详细的应用及案例视频,请关注:[img=,430,430]http://ng1.17img.cn/bbsfiles/images/2018/04/201804171148435579_3370_3199866_3.jpg!w430x430.jpg[/img]沃佳机器视觉,交流电话:13798190649
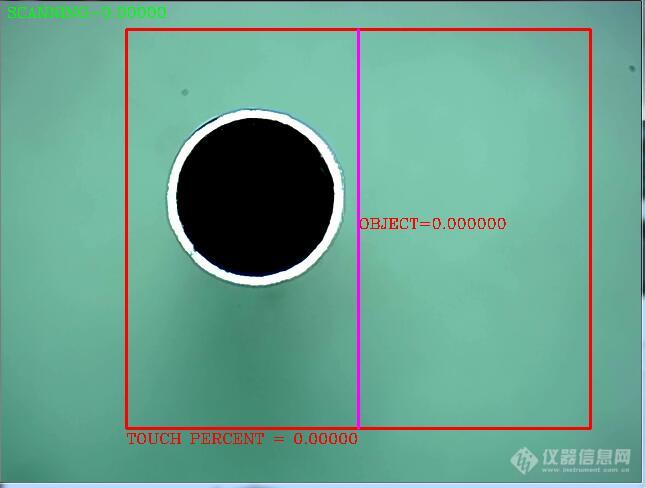
[color=#3e3e3e]对于很多管状产品,产品在生产过程中需要将原材料加工、焊接、拼接以形成管状,工艺上对焊缝、拼接缝的处理至关重要,因此,对产品焊缝、拼接缝规格的检测就必不可少,而这种检测靠人工是无法高效精准完成的。[/color][color=#3e3e3e]通过机器视觉检测管状端面特征,可以精确分析端面焊缝大小情况,进而对产品进行分拣处理:[/color][color=#3e3e3e][img=,645,488]http://ng1.17img.cn/bbsfiles/images/2018/03/201803301825452583_1508_3199866_3.jpg!w645x488.jpg[/img][img=,645,488]http://ng1.17img.cn/bbsfiles/images/2018/03/201803301825441703_4165_3199866_3.jpg!w645x488.jpg[/img][img=,690,363]http://ng1.17img.cn/bbsfiles/images/2018/03/201803301825447483_348_3199866_3.jpg!w690x363.jpg[/img][img=,690,362]http://ng1.17img.cn/bbsfiles/images/2018/03/201803301825455453_5114_3199866_3.jpg!w690x362.jpg[/img][/color][color=#3e3e3e][/color][color=#3e3e3e]系统结构:[/color][color=#3e3e3e][img=,585,574]http://ng1.17img.cn/bbsfiles/images/2018/03/201803301826476143_9848_3199866_3.png!w585x574.jpg[/img][/color][color=#3e3e3e][/color][color=#3e3e3e]设备介绍及案例视频请关注:[/color][color=#3e3e3e][img=,430,430]http://ng1.17img.cn/bbsfiles/images/2018/03/201803301827231643_710_3199866_3.jpg!w430x430.jpg[/img][/color]
[font=&]【题名】:[color=#333333][size=24px] [/size][size=16px]基于双目立体视觉的视网膜成像系统研究[/size][/color][/font] [font=&]【全文链接】: https://opticsjournal.net/Articles/OJc190f42e505f054d/FullText#:~:text=%E6%91%98%E8%A6%81.%20%E4%B8%BA%E4%BA%86%E4%BB%8E%E4%B8%8D%E5%90%8C%E7%9A%84[/font]
2013年04月08日 来源: 新浪科技 作者: 晨风http://www.stdaily.com/stdaily/pic/attachement/jpg/site2/20130408/2c27d71a3b4612cc50ff1e.jpg通过对唤醒受试者之前9秒钟其大脑活动的分析,研究人员可以判断这个人刚才是否正在做梦 新浪科技讯 北京时间4月8日消息,据国外媒体报道,一个日本神经科学家小组日前成功地使用大脑扫描设备读出人们梦境中的内容。 日本京都ATR计算神经科学研究所科学家神谷之康和他的同事们使用功能磁共振成像(FMRI)对三名睡眠中的受试者脑部进行扫描观察,并同时记录下他们的脑电波信号。 当观察到受试者的脑电波正处于梦境的早期睡眠特征时,研究人员便将受试者唤醒并询问他们刚才梦到的是什么情景,随后便让他们继续入睡。这种测试的进行期间有3个小时的间隔,并采用不同的方式,针对不同的受试者重复进行7~10次。 在每次间隔期间,受试者每小时会被唤醒10次。每一位受试者都报告他们大约每小时内都会出现大约6~7次梦境,这样每一位受试者身上都会记录到大约200次梦境事件。 大多数梦境所反映的是日常的生活。如一位受试者表示:“我梦到我在一家面包店里。我买了东西然后走到外面的大街上,那里有一个人正在拍照。”另一位受试者叙述说:“我看见一座巨大的铜质雕像,在一座小山坡上。在山脚下有小屋子,街道,还有树林。”也有一部分受试者的梦境中包含了一些不同寻常的内容,比如遇见一位电影明星,或是梦见自己置身于一座录音棚之中。 神谷之康和同事们使用普林斯顿大学开发的语料数据库WordNet来提取受试者陈述报告中的语言特征,并将其划分为20个类别,如“车”,“男性”,“女性”以及“计算机”等,这些文字都是在受试者的陈述中出现频率最高的。随后研究组使用对应于这些文字的图片,让受试者去观看这些图片并同时扫描并记录他们的大脑活动情况,最后将这些数据与此前在进行睡眠实验中唤醒受试者时记录的数据进行对比。令人惊奇的是,计算机能够识别梦境中60%左右的图像。 研究人员对受试者大脑的V1,V2 和 V3区域的活动情况进行了分析,这些大脑区域负责视觉图像处理的最早期阶段,并负责对视觉画面的基本解码,如对比以及边界的对齐等等。研究人员也对大脑中负责更高级别图像处理的区域进行了观察,如大脑中负责目标认知的区域,等等。 在2008年,神谷之康和他的同事们曾经报告称他们可以解码并重建受试者大脑区域活动所代表了视觉情景。而现在,他们已经更进一步,实现了对大脑更高级功能区域活动的识别,也因此几乎能精确地预测受试者梦境中呈现的内容。 神谷之康表示:“我们建立了一套模型,用以预测每一类别的内容是否会在梦境中呈现。通过对唤醒受试者之前9秒钟其大脑活动的分析,我们可以判断这个人刚才是否正在做梦,准确性达到75%~80%。” 他也表示这样的实验并非对受试者梦境画面结构的考察。他说:“我们所关注的是梦境的意义,但是我仍然认为有可能从中提取出结构特征,如形状和对比,正如我们在2008年时所做的那样。” 他们所作的这项工作于去年10月份在美国新奥尔良召开的神经科学学会年会上做了报告,并于近期发表在《科学》杂志上。在这篇文章中,研究组指出人类大脑中负责较高级别视觉处理的区域,其针对梦境和视觉感知所产生的神经反应是相似的。 美国加州大学伯克利分校科学家杰克·格朗特(Jack Gallant)表示:“这是一项有趣的工作,令人兴奋。相比低级区域,从更高级别的大脑区域进行解译可以更加精确地重构梦境,这一事实说明引发梦境的大脑活动中牵涉到一些与视觉想象有关的脑部区域。”他说:“另外,由于对梦境的解译在受试者被唤醒前十几秒钟时最为精确,这一点也似乎可以证明我们醒来后回想自己刚刚经历的梦境,这是一种短时记忆。” 神谷之康和同事们目前正致力于对处于快速眼动阶段(REM)的深度睡眠者实施同样的研究,这一阶段一般也被认为与当事人正处于梦境有关。他说:“这一阶段的研究将更具挑战性,因为我们必须至少等待一小时以上才能等到受试者进入快速眼动阶段的睡眠状态。我并不了解很多有关梦境的作用的理论,我比较了解梦境的内容,以及这些梦境内容是如何与大脑中的不同区域相互关联的,这种关联性将帮助我们更好地理解梦境。”(晨风)
[b][font='Microsoft YaHei', 宋体, sans-serif]【序号】:1[/font]【作者】:[b][b][font=&][size=13px][color=#0066cc][/color][/size][/font][font=&][size=13px][color=#0066cc]朱宇栋[/color][/size][/font][font=&][size=13px][color=#0066cc][/color][/size][/font][/b][/b][/b][font=&]【题名】:[/font][b][b][b][b][b][url=http://www.eope.net/EN/abstract/abstract17664.shtml][b]光学镜片外观瑕疵视觉检测技术研究及实现[/b][/url][/b][/b][/b][/b][/b]【期刊】:[font=Arial][size=12px]CNKI[/size][/font][b]【链接】:[url=https://xueshu.baidu.com/usercenter/paper/show?paperid=1m780cd0ac7h0v30sd5u00n0hx324059&site=xueshu_se][font=&][size=13px][color=#0066cc]朱宇栋[/color][/size][/font]光学镜片外观瑕疵视觉检测技术研究及实现 - 百度学术 (baidu.com)[/url][/b][font=&][size=13px][color=#0066cc]朱宇栋[/color][/size][/font]
http://img.dxycdn.com/trademd/upload/userfiles/image/2012/12/A1354686989_small.jpg这种“大脑”能够处理视觉线索,并在纸上复制它们 http://img.dxycdn.com/trademd/upload/userfiles/image/2012/12/A1354686990_small.jpg简图展示Spaun的处理信息的过程 北京时间12月4日消息,据国外媒体报道,加拿大一个科学家组称,他们已经研制出迄今为止最接近真实大脑的机能大脑模型。这个利用超级电脑运行的模拟大脑拥有的一个数码眼睛,可以用来进行视觉输入,它的机械臂能绘制出它对视觉输入做出的反应。这个模拟大脑非常先进,它甚至能通过IQ测试的基本测试。 加拿大滑铁卢大学的神经学家和软件工程师表示,这是迄今为止产生的世界上最复杂、最大规模的人类大脑模型模拟。这个名叫Spaun的大脑由250万个模拟神经元组成,它能执行8种不同类型的任务。这些任务的范围从描摹到计算,再到问题回答和流体推理(fluid reasoning),可谓五花八门。测试期间,科学家亮出一系列数字和字母,让Spaun记入储存器,然后科学家亮出另一种字母或符号,作为指令,告诉Spaun借助它的记忆力做什么。随后机械臂会描绘出任务输出。该研究成果发表在《科学》杂志上。 Spaun的大脑由250万个神经元组成,它分解成一串模拟头盖骨子系统,其中包括前额皮质、基底神经节和丘脑,它们通过模拟神经元连接在一起,精确模拟真正的人类大脑的线路布局。这种模拟大脑的基本概念,是努力让这些子系统的行为很像真正的大脑:视觉输入经过丘脑处理,最终数据被储存在神经元里,然后基底神经节向一部分皮层发送任务指令。所有这些计算结果都是通过精确的生理学模拟进行的,模仿电压尖脉冲和神经传递素。Spaun甚至模拟了人类大脑的局限性,努力储存更多短期记忆,而不是少量记忆。从机械学上来说这个模拟大脑非常简单,但是它的变通能力非常惊人。 研究人员表示,在这种大脑的发展方面存在一些非常诱人的暗示:从简单任务开始,然后把它们积聚起来,组合到一起,制成具有复杂功能性的模型。由克里斯-埃利亚史密斯领导的这个科研组称,他们下一步是让Spaun具备自适应可塑性——通过简单的行动重新布局新线路、学习新任务的能力,而不只是按照事先编排好的程序做。作为终极目标,埃利亚史密斯非常看好Spaun的发展前景。他说:“它有助于我们了解大脑行为、生物基及其相关行为。这对所有类型的健康应用非常重要。”测试中他“杀死”人造神经元,并观察Spaun的执行能力的下降,这对了解自然衰老和退行性疾病至关重要。 Spaun是根据Nengo制成的,后者是用来模拟神经系统的一种图形化的开源软件包。如果你想模拟自己的大脑,你可以下载Spaun神经模型,不过你可能需要比台式电脑更强的执行能力。
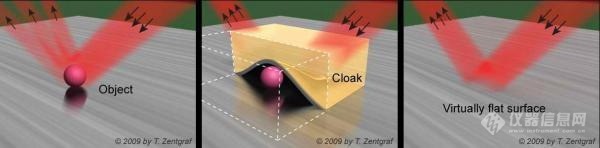
《自然—材料学》:美科学家造出“隐身斗篷”[img]http://ng1.17img.cn/bbsfiles/images/2009/05/200905061619_148549_1644912_3.jpg[/img]光线照射到“斗篷”时,改变方向。这样,在我们看来,这个地方原本就没有东西——放置在这里的物品隐身了。最近,美国加利福尼亚大学伯克利分校的研究者们,成功让置于“隐身斗篷”中的物品“消失”。 张翔(Xiang Zhang)是美国加州大学伯克利分校材料科学部首席科学家和该校纳米科学和工程研究中心主任。他带领的研究团队用硅纳米材料制造了一种“斗篷”,普通的光学检测,将无法发现放置在斗篷下的物品——尽管我们依然能看到这个“斗篷”,但“斗篷”下的物品,已经“消失”得无影无踪了。当照射到一个平面的光线被“改变方向”,折射出去,就意味着这个物品在我们的视觉中隐身了。 “我们通过使用新的纳米材料,找到了制造隐身衣的新思路”,张翔表示。“我们的‘斗篷’在光学检测下的表现,不仅表明隐身衣是可以实现的,而且也是光学视觉转换的重要一步,它打开了一扇新的研究之门,让我们能够操纵光线,制造出功能更加强大的显微镜和运算速度更快的计算机。” 张翔团队的隐身装置,包括复合材料-复合金属材料、电介质,它非凡的“隐身”本领,更多是来自于独特的结构,而不是物质组成。张翔等人发明了两种新的纳米级材料:用银和镁的氟化物交替分成构成一种渔网状的新材料和从多孔氧化铝中生成的纳米银线。这两种材料都可以改变光线的方向,这是自然存在物所不可能具备的特性。 尽管之前复合金属材料已经成功让“斗篷”从微波频率中隐身,但迄今为止,研究者还没有完成隐身衣的关键步骤——实现光学意义上的隐形。因为金属材料吸收了太多的光线。 张翔和他的团队研制的新隐身“斗篷”完全由绝缘材料制造,在光学频率中,它们往往是透明的。斗篷由矩形的硅片制成,厚250纳米。这可以作为一个光波导,光线仅限于在这个垂直高度中,向前后两个方向自由传播。在纳米硅材料上,研究人员精心设计了一些孔:每个孔直径为110纳米,这就使得斗篷周围的光波发生完全弯曲,就好象喝水流过岩石一样。在《自然—材料学》上发表的实验报告中,这个隐身斗篷覆盖的区域为3.8微米左右。它表明,当光线的方向发生改变,物品的隐身是可以实现的。 现在,隐身斗篷可以在波长1400~1800纳米之间操作,这几乎是近红外部分的电磁频谱,略长于光线,人类的肉眼可见。张翔表示,由于介质组成和设计,隐身斗篷比以前容易制造,且具有(覆盖区域)向上的拓展性。他还乐观地断言,研究者可以制造出新的材料,以更精确地制造这种隐身装置——换句话说,是实现真正意义上的视觉隐身。 “在这个实验中,我们已经证明了光线折射导致隐身的原理在二维物体中是适用的,”张翔表示,“我们的下一个目标,是制造在三维空间中适用的‘斗篷’,并使这种装置能尽快投入实际运用。” 这项研究的经费,由美国陆军研究办公室和美国能源部科学办公室资助。 张翔及其研究小组的这份研究报告,将发表在最近的《自然—材料学》(Nature Materials)杂志上。
戏剧学院的王老师给我们介绍了的视觉艺术的,并且通过从哲学,心理学,信息学等方面对于视觉,艺术,社会学等方面的融会贯通,使我们对于艺术有了另方面的理解。由于王老师的所讲的内容十分广泛,而给我最有帮助的是老师所说的“有界”,“有无界”,“无界”三界,并且,这三界构成了整个宇宙。由于我本人主要是学理工出生,一开始确实不能够理解宇宙是由这些虚无的界构成,因为存在着许多不可用现代科学阐述的奇异现象,我们生活的空间中实际上存在着不可见得多维世界。多维世界在物理上以及能够证实,而实际在古人,早就就有过七级浮屠,十八层地狱,或者头顶三尺有神明的表述。确实许多东西使我这个学习理科的人开始不能理解。而直到老师一堂课学习中介绍了奥本海默的话:“我们科学家把没有搞懂的东西,越搞越清;而艺术家把搞懂的东西越搞越不明。”这句话使我一下子豁然开朗。因为也学了好几年化学,同时自己的工作也是搞化学的研发工作,我们一般的工作所要考虑的模式是:这是什么,这个有多少,达到这个需要有多少个步骤,我要通过什么方法去知道它,达到这个目标最优化的方法是什么……通过象拨壳一样,一点点地把一枚核桃拨得显而易见,其中的壳有多厚,肉有多重,肉是有什么物质构成,从宏观到微观,从种植的方法到分子生物学研究,我们的视野可以达到上至天上星星,下到细胞病毒。正如毛主席说“上可九天揽月,下可五洋捉鳖。”科学技术极大的延伸了我们的感觉。而一切都是那么的精密准确。几乎无懈可击。所以从五四运动到改革开放,我们一直接受的是科学就是真理,科学大于一切。学好数理化,走遍天下都不怕。科学技术是第一生产力。而在这科学至上的理念推动下,我们的教育也一点点地变了味。奥数可以在考大学时的加分;全国的理化竞赛可以直升名牌大学;中小学校,初等数学教育,越来越难。而且由于国外的科研水平和科学素养高。所以我们许多的中小学生,以及大多数大学生拚命地学习外文。而与之相比下,我们现阶段的国文水平,艺术的修养,哲学的思维都有了明显的退步。我考虑了一下,这就是我们过分的强调了数学的精确,或者是科学的严谨。因为我们太看中了科学把许多东西弄得相当地清楚。可能有些清楚是科学家们过于钻牛角尖。使得我们的脑子有很大的禁锢。
植物除了为人类提供食物外,还能带来美丽的视觉享受,现在它们甚至能够挽救我们的生命。美国科学家已经开发出一种神奇的植物,周围出现爆炸物时,它们会改变颜色。 美国科罗拉多大学生物学家简·梅德福特与美国国防部合作,利用植物的自卫反应开发新的反恐武器。在植物DNA中有一种受体蛋白,在感受到萜烯类化合物释放出来时,它们会自发做出反应,加厚叶子的表皮,进而改变颜色。
http://www.stdaily.com/stdaily/pic/attachement/jpg/site2/20111215/2c27d720c8961053fbb640.jpg《黑客帝国》里的人物通过把电脑植入大脑,利用电脑程序学习新技能,变成超人http://www.stdaily.com/stdaily/pic/attachement/jpg/site2/20111215/2c27d720c8961053fbbe41.jpg科学家认为,有一天我们也能“下载”武术等新技能新浪科技讯 北京时间12月15日消息,研究人员表示,甚至在不清醒的状态下学习武术、驾驶飞机或者学说新语言的梦想即将变成现实。美国波士顿大学和日本京都国际电气通信基础技术研究所计算神经学实验室(ATR Computational Neuroscience Laboratories)的科学家认为,未来学习一项新技能只需坐在电脑显示器前,等待把该技术“下载”到大脑里即可。他们一直在研究功能磁共振成像机(FMRI)如何通过传递信号改变一些人的大脑活跃模式,来“诱使”知识经过他们的视觉皮质。这一过程被称作Decoded Neurofeedback或者DecNef。在这期间不需任何药物,试验对象甚至不必处于清醒状态,他或她只要把他们的大脑活性改变成“目标”模式,这些模式可以是从足球明星到象棋大师中的任何一种。第一论文作者、波士顿大学的塔克奥-瓦塔纳贝说:“成年早期的可视面积为了促进视知觉学习,具有充分可塑性。”研究人员知道他们的方法已经生效,因为功能磁共振成像志愿者都经历了视觉技能测试,并把他们的结果与未接受这种治疗的人的结果进行对比,最终前者的得分更高。《黑客帝国》三部曲里的人物通过嵌入到他们大脑里的电脑学习新技能,每次学习时,他们只需把新技能上传到他们的大脑里。研究人员表示,我们距离把这种事情变成现实已经不远。他们的研究结果发表在《科学》杂志上。
滴定实验有很多种,但是对于实验台的颜色大概也就那么几种,常用的就是黑白两种。对于我们一般地滴定实验哪种背景颜色会产生较小的视觉误差呢?大家就自身的经验来谈谈。[IMG]http://4a.beihua.edu.cn/hxkj/bweb/files/xm_zh1.files/image005.jpg[/IMG][IMG]http://www.hebmu.edu.cn/fxhx/page/fzjxzy/studyhelp/char03_/images/S10.jpg[/IMG][IMG]http://www.chem17.com/products/member/images/chem1723281.jpg[/IMG]对于测定水泥中氧化镁的含量时,我比较喜欢用黑色,因为那种荧光绿在黑色背景中消失比较明显,但是对于其他实验我还是比较喜欢白色。







 我要推广仪器
我要推广仪器
 下载APP
下载APP