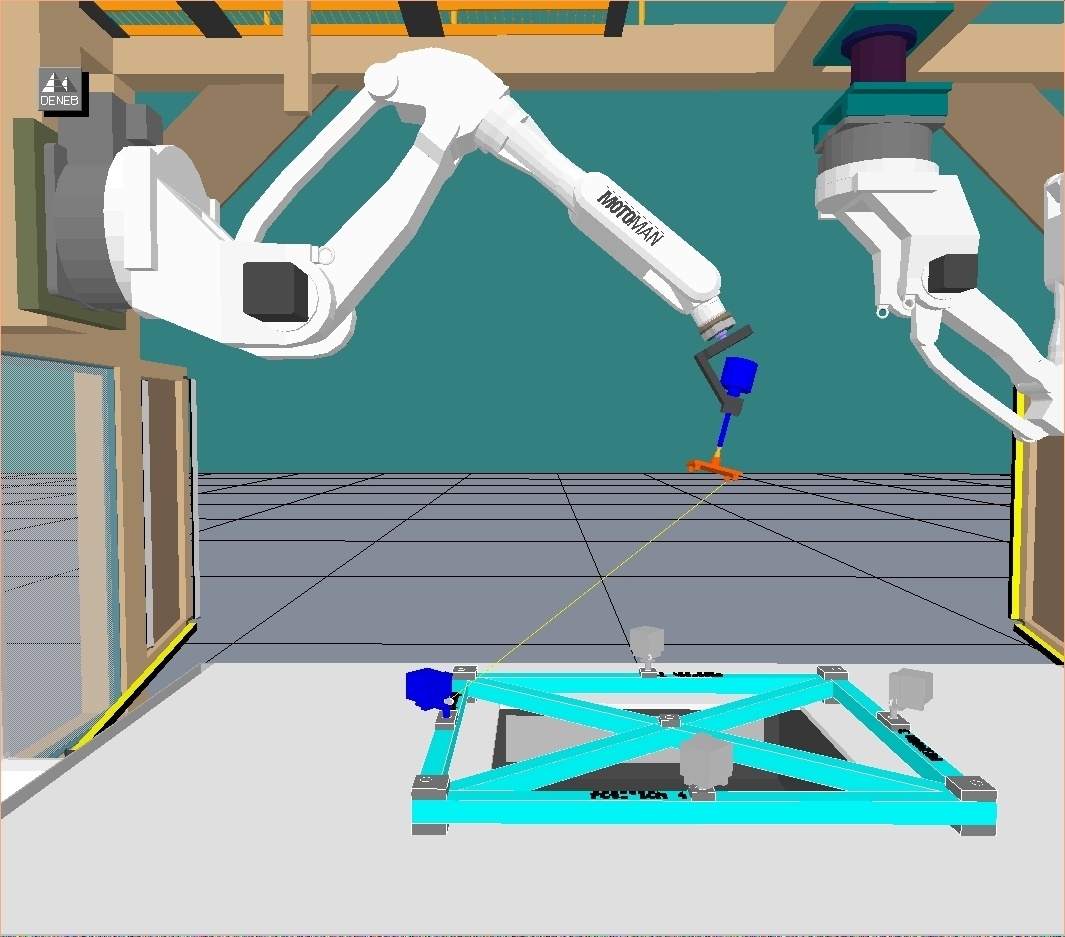
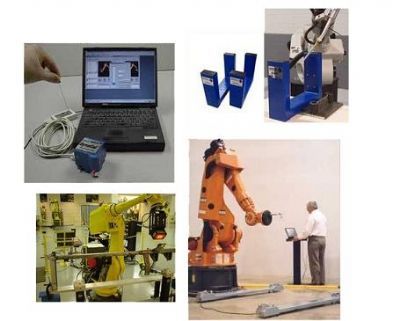
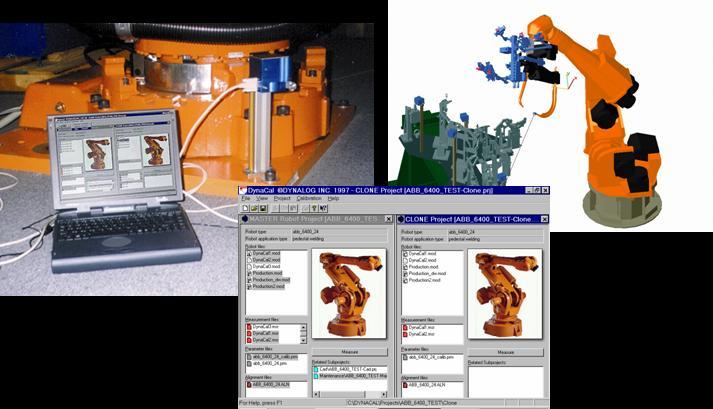
工业机器人运动学测试校准是机器人研究的重要课题,工业机器人测试校准是一个集建模、测量、机器人实际参数辨识、误差补偿实现于一体的过程。在机器人产业化的背景下有重要的理论和工程意义。 机器人运动学测试校准是机器人研发生产的重要内容,工业机器人测试校准是一个集建模、测量、机器人实际参数辨识、误差补偿、性能优化实现于一体的过程。在机器人产业化的背景下有重要的理论和实际意义。 实际生产出来的机器人跟理论设计时的机器人存在差异,具体原因表现在:机器人零部件加工制造误差、机器人组装误差、传动机构误差、减速机齿轮间隙、机器人减速比误差及耦合比误差、连杆长度误差、转角角度、轴平行度、设备损坏、配件老化、环境温度影响等等。根据经验,这些因素往往会导致机器人实际的精度存在5~10mm的偏差。 如果不能对机器人进行全面的测试标定,机器人性能就很不稳定。机器人就只能完成一些简单的、低端的、粗放型的作业。 如果对机器人进行了全面的测试标定,就可以不断的改善、调试机器人的各项参数,从而可以将机器人精度提高到0.5mm左右。这样机器性能很稳定。能进行高精度的、高尖端的、高附加值的应用领域。 我司一直从事机器人测试检测研究。可以提供专业的机器人测试标定平台,有测试标定专利,能出具专业的测试报告。能对机器人性能进行全面综合分析。具体可以提供以下检测方面。 第一款设备是 3D CompuGauge机器人测试设备。 用于评估机器人性能,分析机器人运动轨迹,诸如:机器人运动的实际轨迹与设计的轨迹之间的偏离,机器人速度,加速度,机器人负载情况下的运动状况,震动,温度对机器人的影响……我们测试项目是根据欧洲自动化行业最权威的标准ISO9283标注来测试的,包含了机器人测试的所有项目。此款设备应用于:ABB,Comau, FANUC, KUKA, Staubli, Mitsubishi, REIS, PUMA…… 第二款设备是DynaCal-lite机器人标定设备。此款设备优点是:快速校准机器人TCP点,home点,连杆长度,机器人各轴夹角,检测机器人关节齿轮间隙,减速比,耦合比…….并补偿回去,一般二十分钟可校准好一台机器人。此款设备已用于与 ABB, OTC, Nachi, Comau, FANUC, KUKA, Staubli, Mitsubishi, REIS, PUMA …… 第三款设备AccuBeam机器人温度补偿系统。此款设备优点是:在校机器人温度补偿系统。机器人长时间作业时。由于周围环境温度变化(从夏天到冬天,从白天到晚上)以及机器人自发热(电机、伺服马达、减速机)到时机器人精度有一定程度的漂移,AccuBeam 可以很方便测试机器人随温度变化的漂移量并且在线补偿。此款设备已用于与 ABB, OTC, Nachi, Comau, FANUC, KUKA, Staubli, Mitsubishi, REIS, PUMA …… 第四款设备是AutoCal机器人工具点重复性测试系统。此款设备优点是:在线校准机器人TCP点,关节点,以及温度补偿。一般1分钟左右就校准一次,以确保机器人24小时作业时时刻刻保证机器人精度复位到初始值。此款设备已用于与 HYUNDAI, KAWASAKI, MOTOMAN, ABB, OTC, Nachi, Comau, FANUC, KUKA, Staubli, Mitsubishi, REIS, PUMA ……以下是设备操作链接,请下载观看。 整个检测平台具有如下优点:1、按照ISO-9283标准进行测试:测试的参数多,可以更好、更全面地评估机器人性能。并出具权威测试报告。2、标定的参数多:可以最大限度的提高机器人的精度。3、设备体积小:方便携带,可以直接带入客户现场作业。4、操作简单:无需预热,3分钟可以将设备布置好,然后进行作业。5、效率高:作业速度快,5~10分钟之内可以校准好一台机器人。6、采集数据无死点:不会因为机器人特殊姿态,而导致光路阻挡导致采集不到数据的现象。可以一次性采集数据,不需要移动测试设备。从而避免了误差累计。7、操作方便,设备维护成本低。
 留言咨询
留言咨询



 400-860-5168转6117
400-860-5168转6117

























 我要推广仪器
我要推广仪器
 下载APP
下载APP