宋延林课题组利用打印技术制备高性能无铅柔性压电声敏传感器
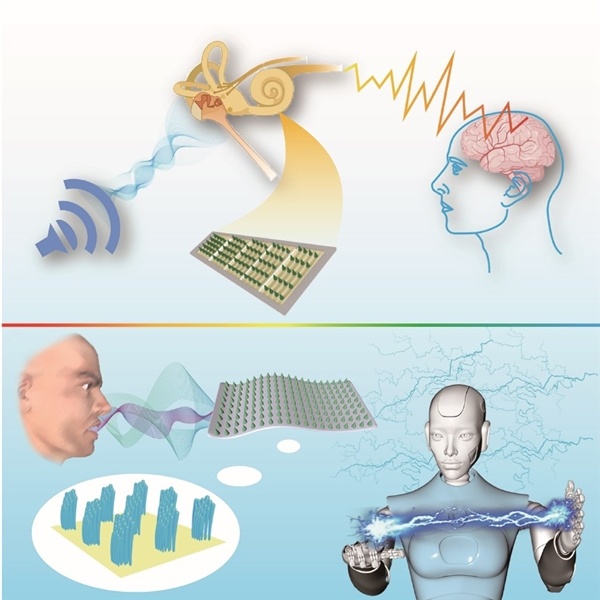
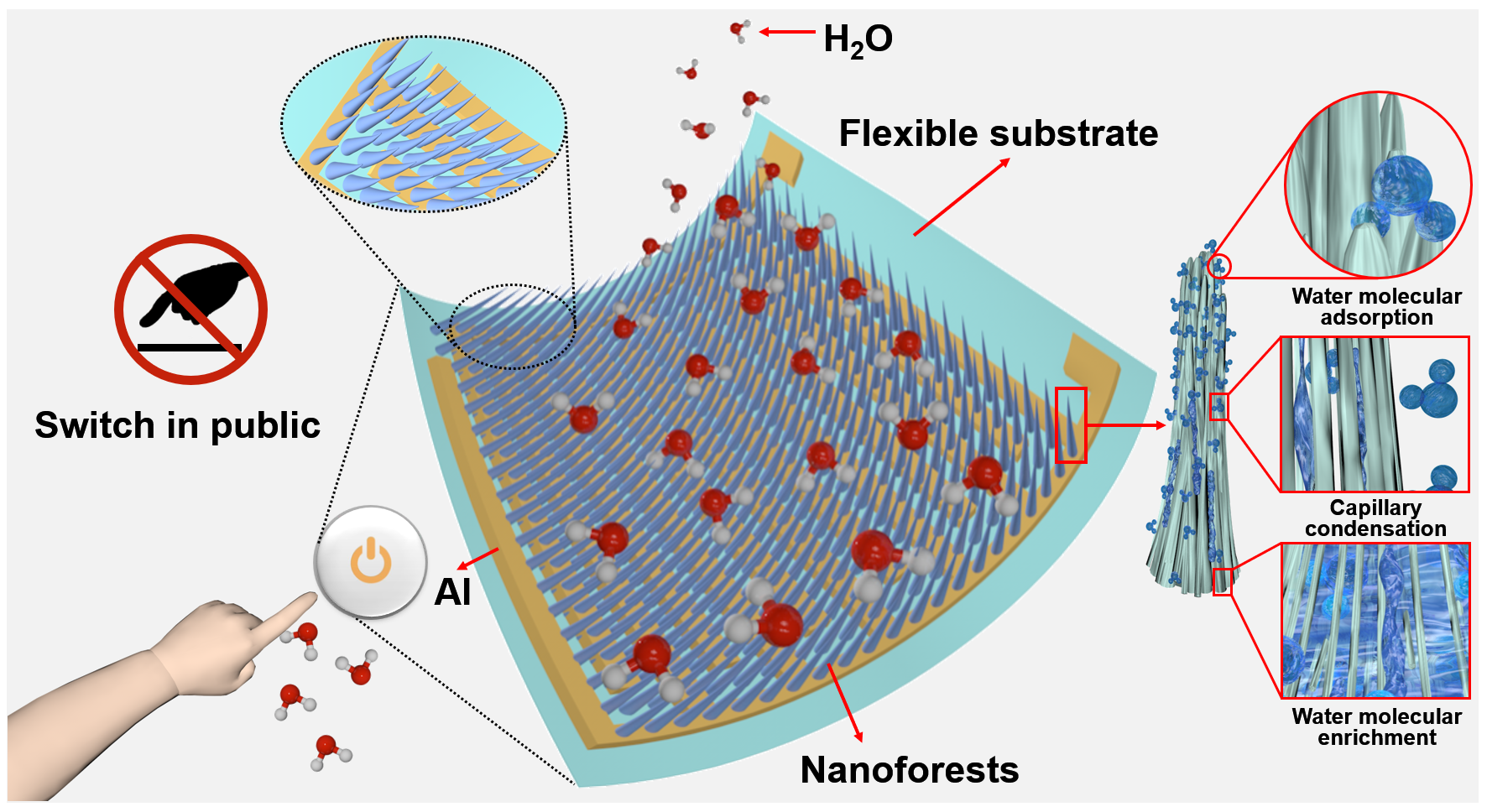
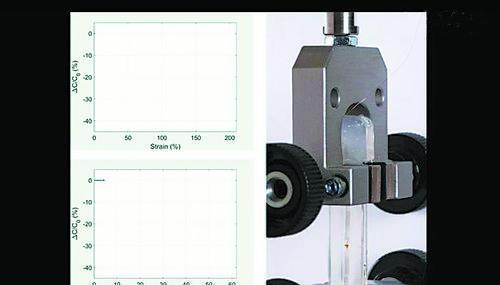
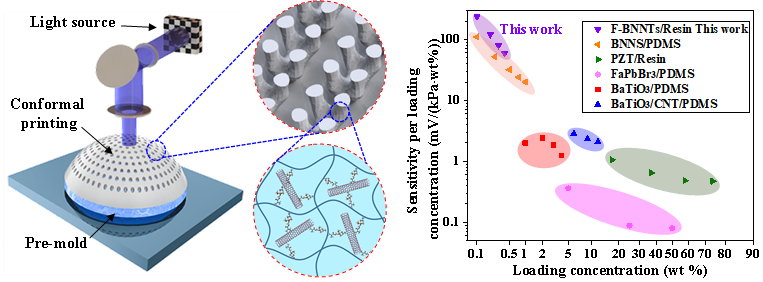
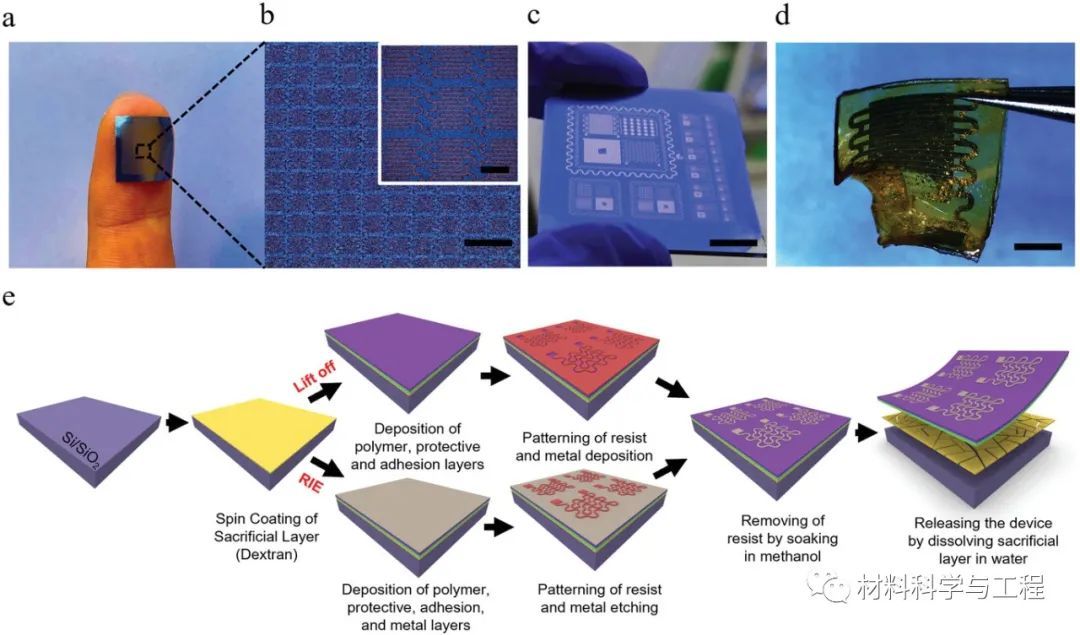
根据世界卫生组织的数据,全球约4.3亿人因耳蜗受损而遭受听力损失,改善听力主要靠人工耳蜗。然而,传统的人工耳蜗语音识别能力较低,而且刚性电极与软组织间的不匹配可能导致神经损伤和耳鸣等问题。随着物联网和人工智能的发展,柔性自供电人工耳蜗的研究引起了广泛关注。在国家自然科学基金委、科技部、中国科学院和北京市的大力支持下,化学研究所绿色印刷院重点实验室宋延林课题组近期在各向异性材料合成和图案化器件制备方面取得了系列进展,如二维MXene与纳米晶复合材料研究(J. Mater. Chem. A, 2022, 10, 14674-14691 Nano Res. 2022, DOI:10.1007/s12274-022-4667-x),直写高性能原子级厚二维半导体薄膜和器件(Adv. Mater. 2022, DOI:10.1002/adma.202207392),制备基于交替堆叠微电极的湿度传感超级电容器(Energy Environ. Mater. 2022, DOI:10.1002/eem2.12546)等。压电材料可以作为未来人工耳蜗的有利候选材料,然而,主流含铅压电材料与生物不相容,对环境不友好,其他压电材料的电输出功率由于声电转换性能低,不足以直接刺激听觉神经。因此,制造高性能无铅柔性压电声学传感器意义重大。最近,他们受人类耳蜗外耳毛细胞的启发,报道了一种基于准同型相边界的多组分无铅钙钛矿棒的直写微锥阵列策略,该策略一方面利用取向工程和在两个不同正交相(Amm2和Pmmm)之间形成的准同型相边界,显著提高应力对压电材料性能影响,实现压电响应增强;另一方面在压电薄膜表面引入微锥阵列,增加与声波的接触面积,增强对声波的吸收,从而制备高性能柔性压电声学传感器(FPAS)。该传感器显示出高灵敏度、宽频率响应的特点,覆盖常用的语音频率,同时具有角度灵敏度,可用于记录声音信号,并实现语音识别和人机交互。FPAS还具备防水和耐酸碱等特点,满足自然环境对可穿戴声学传感器的要求。研究成果近日发表于Matter期刊上(https://doi.org/10.1016/j.matt.2022.11.023),论文第一作者是硕士生向钟元,通讯作者是宋延林研究员和李立宏副研究员。 图1. 微锥阵列柔性压电声敏器件应用演示图图2. 声音数据采集、人机交互应用和FPAS的防水性能














 我要推广仪器
我要推广仪器
 下载APP
下载APP