无人船的前世今生
1858年人类首次提出将波浪能转化为推进动力推动船只前进,并于十九世纪90年代首次在实践中获得成功。此后,几位实验者在模型和全尺寸上证明了波浪动力船的可行性。波浪动力无人船制造技术在油价上涨期间发展最为迅速,在现阶段也正好满足节能减排以及减少海洋污染的环保需求。
2008年,日本海员和环保主义者Kenichi Horie驾驶波浪驱动的双体船“三得利美人鱼二号”从夏威夷檀香山驶往日本的Kii海峡。该船的推进系统由Yutaka Terao设计。由于异常好的天气和平静的海面,这次旅行耗时110天,比计划的时间长。这次航行是迄今为止已知最长的载人波浪动力船航行。

Kenichi Horie于2008年乘“三得利美人鱼二号”由夏威夷航行至日本。

“三得利美人鱼二号”的推进装置
最常见的波浪动力船是带有翼片的船,该翼片将波浪中的垂直运动转化为推进动力。除了节省燃料外,这些翼片的另一个好处是可以显著减少剧烈船舶抖动。
AutoNaut 无人船
2013年,MOST(AV)有限公司成立并开发了AutoNaut 无人船,并于那时起开始销售。2016年7月,在Seiche Group的投资下,该公司更名为AutoNaut 有限公司。
AutoNaut无人船在波浪方向上由四个安装在位于船首和船尾龙骨上的翼片向前推进。在平静的海面上,系统可由螺旋桨辅助推进。充分的水动力测试完善了该技术,现场试验和海洋任务证实了其在海洋风暴中的稳定性。AutoNaut在风暴条件下能够自我扶正并复原,在65kt风暴及10米海浪条件下、倾覆和扶正4次,并成功地继续执行任务。

AutoNaut预先编程设置好路线,在任务期间由控制器监控。远程控制器监督输入数据,并能够在必要时调整任务,监控船载系统的健康状况,并对船载功能进行远程控制。无人船的维护成本非常低,仅需要在任务之间清理船体污垢,并确保所有系统和设备有效运行。

与铱星通信系统连接的系统控制软件可安装在所选的服务器上(根据需要提供该服务)。用于驾驶AutoNaut的GUI可在任何具有网络连接的笔记本或台式电脑上运行。

3m AutoNaut平台上太阳能光伏板的峰值输出功率为175W,而5m平台上的峰值输出功率为300W。实际发电量取决于作业纬度、季节和天气。在冬季月份,远程控制器可以根据数据采集的优先级,通过远程开关传感器/设备来平衡可用电池电量和系统负载(如有必要)。当传感器安装和任务位置确认后,我们可以通过发电情况提供负载平衡方面的指导。

AutoNaut 3.5设计用于安全、简单的部署和回收。单一吊点,用于从船舶上布放与回收。(适用于船台布放的低吃水深度型号可选)

AutoNaut 5.0旨在实现多功能性。它对传感器、电池和太阳能电池板的承载能力更大。模块化的设计提供了灵活的有效载荷,为便于运输,船体可分为两半。
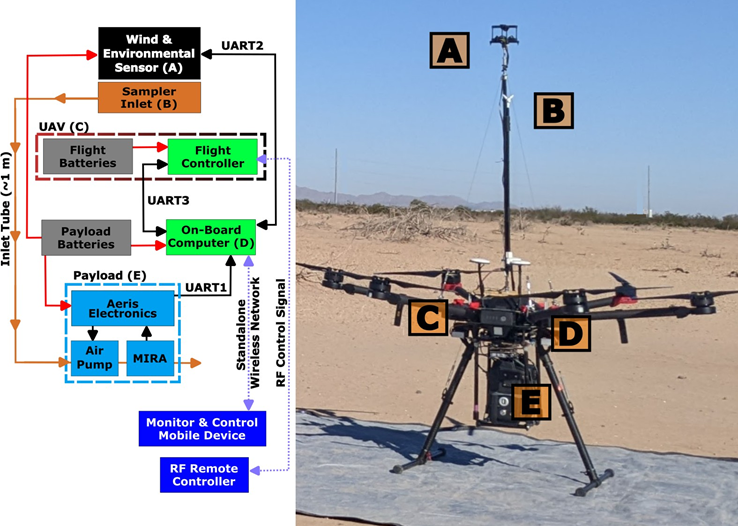
【应用】基于无人机系统(UAS)的甲烷排放测量
【时讯】奕枫仪器携手德国TriOS共同参加2024上海环博会

【时讯】奕枫仪器受邀参加“第22届中国水色遥感大会”

【时讯】西班牙D.nota/Bettair公司到访奕枫仪器







相关产品
定量过滤技术积分腔吸收计
点光源积分腔吸收计
TriOS EGC洗涤水排放监测系统更换/组装配件
MIRA Ultra便携式温室气体分析仪(CH4 /N2O/CO2/H2O)
UviLux FUEL - BTEX苯系物荧光计
TE-Wilbur 便携式PM10&PM2.5采样器
RAMSES G2自容式高光谱辐射计
OPUS UV深海硝酸盐测量仪
TriOS船舶废气清洁系统(EGC)水质监测仪
近海温盐深(CTD)及多参数监测系统
pHiDO 溶解氧&pH传感器
OPUS aero高浓度硝酸盐&亚硝酸盐测量仪
NICO plus增强型硝酸盐测量仪
microFlu V2荧光计
ProCeas激光红外气体分析仪

关注

拨打电话

留言咨询





