北京航空航天大学文力研究团队提出了基于双模态智能传感界面的软体机器人非接触交互示教方法。
在本项研究中,该团队利用新型微立体面投影光刻技术(nanoArch® S140,摩方精密)实现了柔性介电层表面微型金字塔模具的3D打印,该传感器自身具有较强的柔性和可拉伸性。
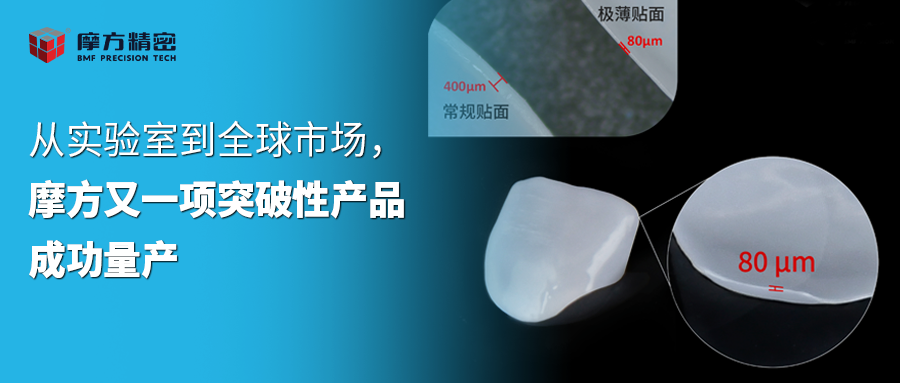
摩方携手国内科研团队,从实验室创新到全球产业化
微纳3D打印:推动生物支架研发进程,实现高端医疗器械自主创新

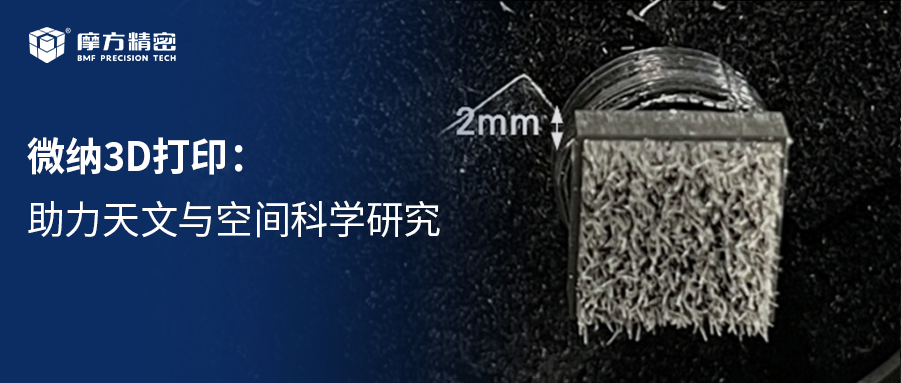
韩国航空宇宙研究院《JGR Planets》:基于3D打印月壤三维模拟物在小相位角下的光散射特性研究
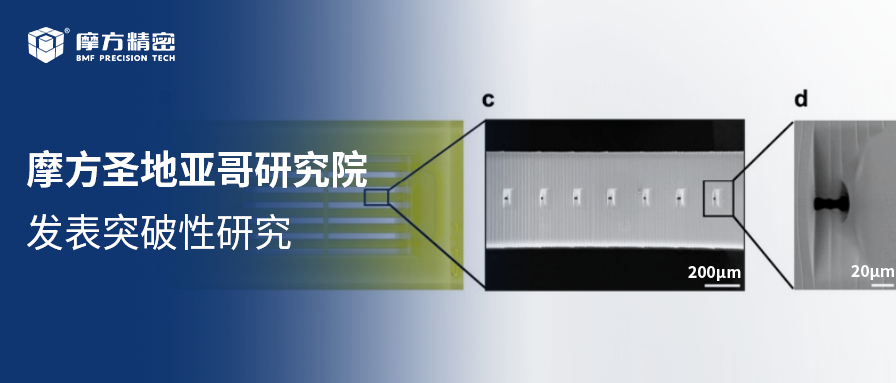
摩方精密圣地亚哥研究院研发突破性仿生三维可灌注血管化皮肤芯片成功,开启药物与化妆品测试新时代
摩方材料BMF 3D打印微流控生物芯片
摩方精密BMF-复合精度光固化3D打印机 - microArch® D0210
摩方精密BMF-复合精度光固化3D打印机 - microArch® D1025
摩方材料BMF Material 3D打印服务 连接器3D打印
摩方材料BMF Material 3D打印服务 微针3D打印
摩方材料BMF Material 3D打印服务 内窥镜3D打印
摩方精密BMF-多材料光固化3D打印机- MultiMatter C1
摩方精密-LMM光固化金属3D打印机-Hammer Lab35
摩方精密BMF-光固化3D打印机(25μm)- microArch® S350
摩方精密BMF-生物3D打印机-P150
摩方精密BMF-生物3D打印机-microArch S240A
摩方精密BMF-生物3D打印机-S140
摩方精密BMF-生物3D打印机-S230
摩方精密BMF-生物3D打印机-S130
摩方精密-Exaddon CERES-微纳金属3D打印系统

关注

拨打电话

留言咨询






