推荐厂家
暂无
暂无
 留言咨询
留言咨询
 金牌1年
金牌1年
 400-860-5168转6169
留言咨询
400-860-5168转6169
留言咨询
 金牌1年
400-860-5168转6164
留言咨询
金牌1年
400-860-5168转6164
留言咨询
 400-860-5168转6164
留言咨询
400-860-5168转6164
留言咨询
 400-860-5168转3524
留言咨询
400-860-5168转3524
留言咨询
 留言咨询
留言咨询






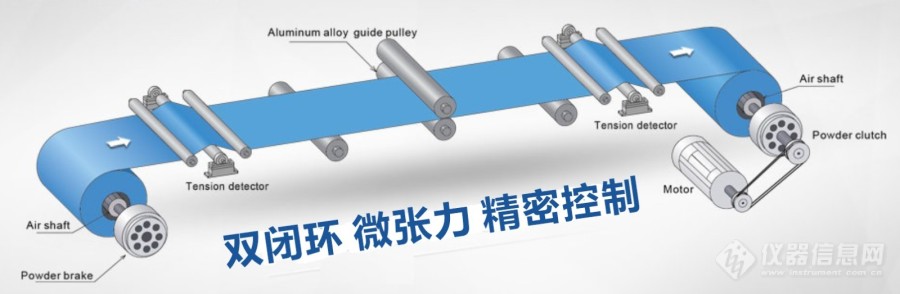
[size=16px][color=#339999][b]摘要:采用当前的各种涂布机很难适用气体扩散层这类脆性材料的涂布工艺,需要控制精度更高的微张力控制系统。为此本文基于串级控制原理,提出了采用双闭环PID控制模式和超高精度PID张力控制器的解决方案,一方面形成浮动摆棍闭环和主动辊闭环构成的串级控制回路,另一方面是采用目前测控精度最高的工业用PID控制器,结合相应配套的高精度传感器和执行器,可真正实现微张力的精密控制。[/b][/color][/size][align=center] [img=微张力精密控制,690,225]https://ng1.17img.cn/bbsfiles/images/2023/07/202307261628010805_2785_3221506_3.jpg!w690x225.jpg[/img][/align][size=16px] [/size][size=18px][color=#339999][b]1. 问题的提出[/b][/color][/size][size=16px] 气体扩散层(GDL)在燃料电池中起到支撑催化层、收集电流、传导气体和排出反应产物水的重要作用,常用于质子交换膜燃料电池,在具体生产工艺中需要在GDL材料表面定量涂布一层特定功能涂料。由于GDL基体层材料较脆,涂布工艺过程中易造成基体层材料断裂或撕裂,转弯处易折断,在高温状态下材料比常温下更脆弱,一般要求涂布过程中控制张力设定在5~10N很窄的一个范围内,且还需要在此微张力范围内具有较高的控制精度。[/size][size=16px] 传统涂布设备,浮动摆辊均为气缸驱动,直线电位器反馈摆辊位置。存在以下问题:[/size][size=16px] (1)无法精确控制摆辊位置。[/size][size=16px] (2)气缸行程只有一个方向,需要料膜的张力平衡气缸推力,易造成GDL脆性材料拉伸。[/size][size=16px] (3)摆辊瞬间偏移至一端时,料膜张力瞬间增大或减小,极易造成GDL脆性材料的撕裂甚至断裂。[/size][size=16px] (4)张力控制器中的模数转换AD精度和数模转换DA精度较低,最小输出百分比也只能达到0.1%,无法提供更高精度的测量和控制。[/size][size=16px] 由此可见,为实现GDL脆性材料的微张力控制,实现具有精度高、张力小、控制稳的伺服电机驱动的浮动摆辊微张力控制是氢能材料制备的关键技术,为此本文提出了相应的解决方案。[/size][size=18px][color=#339999][b]2. 解决方案[/b][/color][/size][size=16px] 为实现涂布工艺中的微张力高精度控制,本文提出的解决方案包含以下两方面的内容:[/size][size=16px] (1)采用双闭环PID控制形式调节料膜张力,即对浮动摆棍和主动辊进行独立的PID控制。[/size][size=16px] (2)采用超高精度的双通道PID控制器,每个通道都具有24位AD、16位DA和0.01%最小输出百分比。[/size][size=16px] 解决方案所涉及的微张力控制系统结构如图1所示。[/size][align=center][size=16px][color=#339999][b][img=双闭环微张力控制系统结构示意图,500,200]https://ng1.17img.cn/bbsfiles/images/2023/07/202307261628351448_1980_3221506_3.jpg!w690x277.jpg[/img][/b][/color][/size][/align][align=center][size=16px][color=#339999][b]图1 双闭环微张力控制系统结构示意图[/b][/color][/size][/align][size=16px] 在图1所示的双闭环控制系统中,浮动摆辊PID闭环控制的具体过程是根据工艺要求,给控制器输入张力值,控制器根据张力传感器信号与设定张力值之差进行快速PID计算后输出控制信号,此控制信号控制浮动摆辊伺服驱动器和伺服电机动作,从而使浮动摆棍产生偏移使得料膜张力快速达到设定值。[/size][size=16px] 浮动摆辊的PID闭环控制过程主要是通过浮动摆辊偏移来调节料膜张力,主动辊速度仍为主机速度,并未参与调节。当浮动摆辊伺服电机持续动作调节料膜张力时,浮动摆辊偏差会导致累积,最终达到浮动摆辊位置报警值。因此仅由浮动摆辊伺服电机调节料膜张力不能完全解决张力不稳、精度不高的问题,为此增加主动辊PID闭环控制实现张力的精准控制。[/size][size=16px] 第二路主动辊PID闭环控制的具体过程是在浮动摆辊PID闭环控制实现调节后,由于浮动摆辊偏离中位,位移传感器跟随浮动摆辊偏移产生对应的偏移电压信号并输入给控制器,控制器根据此偏移电压信号与0V值的正负偏差进行快速PID计算后输出控制信号,此信号控制主动辊伺服驱动和主动辊伺服电机来改变主动辊速度,使得浮动摆棍回到中位,最终实现GDL脆性材料的微张力精准控制。[/size][size=18px][color=#339999][b]3. 总结[/b][/color][/size][size=16px] 综上所述,通过上述解决方案,可很好的解决微张力的精密控制问题,具体优点如下:[/size][size=16px] (1)解决方案所采用的双闭环控制结构,实际上是一个非常典型的串级控制结构,因此充分利用了串级控制结构的优势,更利于实现高精度张力的控制。[/size][size=16px] (2)制约微张力精密控制的另一个主要因素是控制器的精度普遍不高,采用PLC很难达到超高的采集和控制精度。因此,本解决方案中采用了超高精度的双通道PID控制,既使用了串级控制功能,又实现了超高精度的PID控制。[/size][size=16px] 当然,传感器和执行器精度也是制约微张力精密控制的因素,为了真正实现微张力的精密控制,还需在使用串级控制和超高精度PID控制器的基础上,配备相应高精度的传感器和执行器。[/size][size=16px][/size][size=16px][/size][align=center][b][color=#339999]~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~[/color][/b][/align][align=center][b][color=#339999][/color][/b][/align][align=center][b][color=#339999][/color][/b][/align][align=center][b][color=#339999][/color][/b][/align][align=center][b][color=#339999][/color][/b][/align]
高精度平面主要包括平晶、平行平晶、标准平面和分划板等。高精度平面的平面度一般γ/20,平行度<2′′。 1高箱度平面的加工方法 a古典抛光法 在一般抛光机上采用柏油模、分离器抛光.这种方法与操作者的技能有较大关系, b.蟹钳式分离器加工法 它在很人程度上减小了倒翻力矩的挤压作用,同时也采用新型抛光模(如混合模、聚四氟乙烯抛光模等),明显提高了加效率利和精度。 c.环形抛光模加工法 它用校正板和夹持器代替分离器.不仅能保持分离器的功能,又使抛光速度趋于均匀。采用了膨胀系教很小的玻璃作为基底,其上涂以聚四氟乙烯塑料为抛光膜层,加上校正板的连续自动修正作用,所以可在连续加工中保持抛光模的面形稳定.能获得γ/10~γ/200的面形精度和平行度为1"~0.1"的平行平晶.也可加工棱镜、多面体等。 d.离子抛光法 一般是将氢等惰性气体原子在真空中用高频放电方法使之离子化,由高压场使离子加速,轰击光学玻璃表面。通常能以原子为单位去除表面材料,形成所需要的抛光面。这种方法可获得高精度的光学表面,井能通过控制程序进行自动加工。 e.电子计算机控制撇光法 用计算机控制光学磨具在零件表面上的运动轨迹、进给速度和压力等工艺因素达到修磨零件表面的目的。这种方法的优点是工具位置、停留时间、运动轨迹及操作参数等均可实现最优化、加工精度可达γ/80,适合于高精度大型光学零件的最后修磨加工。2.高精度平面的检测 测试方法有液面法、等倾干涉法、多光束干涉法、阴影法和三面法等。
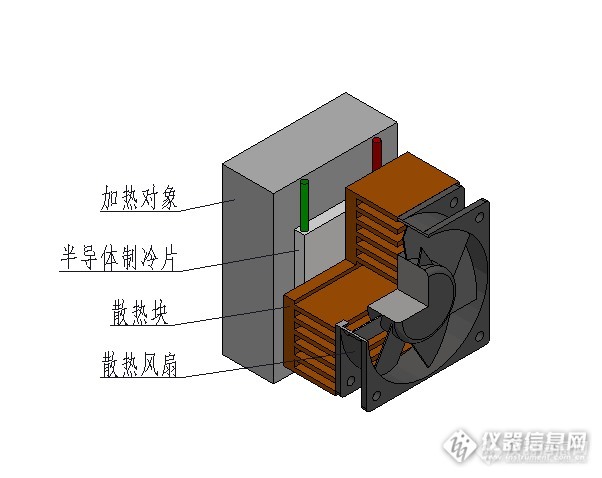
基于半导体制冷片的高精度温度控制系统成果简介半导体制冷片是利用特殊半导体材料构成的PN结产生Peltier效应制成,具有无噪声、体积小、结构简单、加热制冷切换方便、冷热转换具有可逆性等优点。化工安全组对基于半导体制冷片温控系统的影响因素进行了全面、系统分析和实验研究,设计完成了大功率、高可靠性的半导体制冷片驱动电路,并积累了半导体制冷片加热制冷切换双向温控算法的丰富经验,形成了半导体制冷片整套的研究方法和应用手段。目前,半导体制冷片的高精度温度控制系统已应用在产品中。系统组成http://ng1.17img.cn/bbsfiles/images/2016/05/201605302242_595303_3112929_3.png图1 基于半导体制冷片的温度控制单元结构http://ng1.17img.cn/bbsfiles/images/2016/05/201605302242_595304_3112929_3.jpg图2 高精度温度控制系统硬件组成技术指标(1)温度范围:0~120℃;(2)控温精度:±0.05℃;(3)半导体制冷片驱动电路能够最大支持20V 15A输出。http://ng1.17img.cn/bbsfiles/images/2016/05/201605302243_595305_3112929_3.jpg 图3 0℃和120℃温度控制曲线图http://ng1.17img.cn/bbsfiles/images/2016/05/201605302243_595306_3112929_3.jpg 图4 37.8℃温度控制过程曲线图 http://ng1.17img.cn/bbsfiles/images/2016/05/201605302243_595307_3112929_3.jpg 图5 37.8℃稳态控制精度曲线图技术特点(1)高精度温度采集电路:创新性采用比率法和激励换向技术,系统温度分辨力达到0.001℃,检测精度达到±0.01℃。(2)大功率高可靠性的半导体制冷驱动:采用H桥电路形式实现半导体制冷片加热制冷方式的切换,解决了该类驱动电路无死区防护、功率小等问题;设计引入滤波和保护电路,大大增强了半导体制冷片的寿命及驱动电路的可靠性。(3)双向多模式温控:温控策略充分考虑半导体制冷片加热制冷输出功率差异、功率随温度变化以及系统加热制冷方式切换的随机性等因素,综合采用了单点与扫描结合、高低温分段处理、随环境温度变化动态调节等多重温控调节方式。获得研发资助情况浙江省公益项目前期应用示范情况已用于微量蒸气压测定仪产品中的温度控制,温度范围为0~120℃,控温精度为±0.05℃,驱动电路输出12V/10A。相关产品已通过批量试产,温控系统运行稳定可靠,可复制性强,实现成本低,适合于批量生产。转化应用前景半导体制冷片因加热制冷切换方便、结构简单、系统噪音小、控温精确度高以及成本低等优点,有望在科学仪器温度控制、温度发生和电气设备散热等领域获得广泛应用。特别是随着仪器仪表尤其是生命科学仪器、化学分析仪器等逐渐向高精度、小型化方向快速发展,高精度的小型温度控制系统需求越来越旺盛,因此半导体制冷片具有良好的应用前景。合作方式(1)技术转让;(2)委托开发;(3)双方联合开发。应用领域分析仪器、医疗仪器、生命科学测试仪器、家用电器等领域中高精度的恒温、匀速升降温等多模式的温度控制,以及电气装置散热等。联系人:杨遂军;联系电话:0571- 86872415、0571-87676266;Email: yangsuijun1@sina.com。微信公众号:中国计量大学工贸所工贸所网站:itmt.cjlu.edu.cn中国计量大学工业与商贸计量技术研究所中国计量大学是以“计量、测试、标准”为特色的院校,主要培养测试技术、仪器开发方向的专属人才。中国计量大学工业与商贸计量技术研究所是学校为进一步推动高水平研究团队的建设而在2014年设立的两个学科特区之一,主要针对工业生产与贸易往来中关乎国计民生的计量测试问题,以新方法、技术、设备及评价为研究对象,主要研究方向为化工产品及工艺安全测试技术与仪器、零部件无损检测技术与设备、光栅信号处理与齿轮精密测量,涉及的单元技术有高精度温度检测技术、快速热电传感技术、高稳态温度场发生技术、低热惰性高压容器制备工艺、激光和电磁加热、非稳态传热反演、基于幅值分割原理的光栅信号数字细分、光栅信号短周期误差补偿、机器视觉高精度尺寸测量。研究所同时是化工产品安全测试技术及仪器浙江省工程实验室,先后承担国家重大科学仪器设备开发专项、国家公益性行业科研专项、国家自然基金、973等国家级项目,科研经费超千万。现有专职科研人员9人、工程技术人员2人、在读研究生30余人、行政与科研管理人员3人。“应用驱动、产研融合”是研究所的标签,以应用驱动为前提,通过方法技术化、技术产品化、产品市场化,将科研成果落脚于实际应用,为经济与社会发展提供推动力,同时为研究所提供持续发展所需资金、影响力、信息等各类资源的支撑,目前研究所已拥有2家产业化公司。







 我要推广仪器
我要推广仪器
 下载APP
下载APP
