推荐厂家
暂无
暂无
 留言咨询
留言咨询
留言咨询
留言咨询
留言咨询
留言咨询
 400-628-5299
留言咨询
400-628-5299
留言咨询
 留言咨询
留言咨询
 400-860-5168转2045
留言咨询
400-860-5168转2045
留言咨询

让大脑的智慧与强大的机器“完全”合二为一,人类的这一愿望通过科幻电影《阿凡达》上的钢铁战士“实现”了。如今,浙江大学内的一只猴子如同钢铁战士一样,通过“意念”控制一只机械手进行不同的动作。这一研究,目前与世界顶尖水平同步。这只猴子名叫“建辉”,生活在浙江大学求是高等研究院的实验室内。今天,记者看到了这只“聪明”的猴子,头上带着很卡通的帽子,脑部和电脑以及一只机械手臂之间连接了很多电线。面对杯子、盒子、圆圈等不同的物体,“建辉”指挥着机械手臂用抓、勾、握、捏四种不同的动作将物品牢牢抓住。多次尝试,无一出错。“建辉”是浙江大学高等研究院脑―机接口研究团队取得的最新研究成果,通过运用计算机信息技术成功提取并破译了猴子大脑关于抓、勾、握、捏四种手势的神经信号,使猴子的“意念”能直接控制外部机械。控制大脑是人类一直想做却无法完全企及的事情。大脑内部上千亿个神经元之间通过发出微小的电脉冲相互交流,对人体各种行为 “发号施令”。 但是,这些神经信号却如同一本“天书”。上世纪90年代起,随着计算机等技术水平的发展,一种称为脑―机接口的技术迅速成为了全球科学家最热门的研究领域之一。它致力于在大脑和外部设备(例如假肢)之间建立一条传输大脑指令的通道,实现脑部的信号通过外部设备有效到达身体各处,使行动障碍的人重获独立生活的能力。据浙大脑―机接口研究团队负责人郑筱祥教授介绍,此前,美国科学家曾让猴子通过“意念”控制手臂的伸展,以及令猴子用控制机械手指做出捏的动作。2006年,美国DONOHUE教授将芯片植入人脑,让完全没有行动能力的人,通过思维控制电视机开关和换台,甚至可以在发送电邮。“如今我们的研究成果与美国实现了互补,我们能够精细的控制手指做出多个动作,准确率达到97%,这一成就已与世界一流水平同步。”郑筱祥告诉记者,这一研究成果填补了国内空白。“如果‘心灵感应’能自如的运用于人体的各个部位,就能大大提高肢障患者的生活质量,使他们能够像正常人一样不必完全依赖他人的照顾而生活。”郑筱祥表示,接下去将让“建辉”能够控制机械手臂的伸展,“最终,我们希望能够像美国一样,让这一成果造福人类。”(生物谷Bioon.com)关于浙江大学求是高等研究院浙江大学求是高等研究院成立于2006年10月,是在香港著名企业家、浙江大学资深学长查济民名誉博士和刘璧如女士的鼎力支持、推动下成立的。作为浙江大学校设直属科研机构,求是高等研究院实行单独行政管理,享受学校的特殊政策,业务上由校科学技术研究院管理。2006年底,三位国际知名科学家出任浙江大学最高学术职位——查氏讲座教授,并轮值担任求是高等研究院主席一职,他们是:香港科技大学原校长朱经武教授,美国加州大学罗氏达蒙讲座教授简悦威先生,美国Intel公司前高级副总裁和制造事业部总经理周尚林先生。求是研究院依托浙江大学现有的科研基地,充分采用纳米技术、信息科学、生物医学工程和临床医学的研究成果,围绕神经信息与控制等领域开展多学科交叉研究。着重研究神经控制与修复、运动神经模型、神经信号处理及专用芯片设计、传感器材料的生物相容性、基于遥控和遥测的生物机器人、人工智能、脑—机交互(BCI)等课题。将最新研究成果应用于临床、公共安全等领域,实现科学和技术融合,造福社群,服务社会。
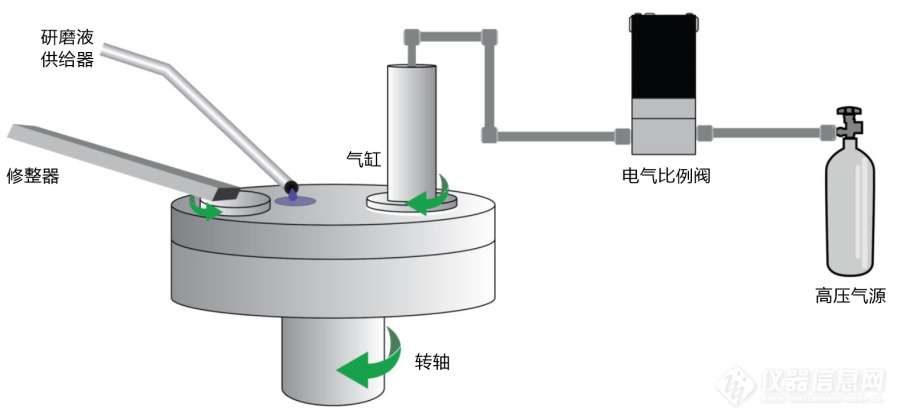
[color=#990000]摘要:为大幅度提高现有CMP工艺设备中压力控制的稳定性,在现有电气比例阀这种单回路PID压力调节技术的基础上,本文提出了升级改造方案,即采用串级控制法(双回路PID控制,也称级联控制),通过在现有电气比例阀回路中增加更高精度的压力传感器和PID控制器,可以将研磨抛光压力的稳定性提高一个数量级,从1~2%的稳定性提升到0.1~0.2%。[/color][align=center]~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~[/align] [size=18px][color=#990000][b]一、问题的提出[/b][/color][/size]在半导体制造过程中,化学机械抛光(CMP)是在半导体晶片上产生光滑、平坦表面的关键工艺。CMP工艺中的压力控制是决定最终产品质量的关键因素。如果压力过高,会损坏半导体材料;如果压力太低,会导致表面不平整。CMP系统中需要配置专用的压力调节装置,以确保压力保持在安全范围内。通过将压力保持在安全范围内,压力调节装置有助于确保半导体晶片在CMP过程中不被损坏。目前的CMP系统中普遍采用电气比例阀作为压力调节器,其典型结构如图1所示。在CMP中采用比例阀来控制抛光过程中施加在晶圆上的压力。由于比例阀是电子控制和压力值的模拟信号输出,因此可以通过控制系统(如PLC)对其进行动态编程和压力监控,这意味可以根据被抛光的特定晶片准确改变施加的压力。此外,由于电气比例阀作为压力调节器是一个闭环控制,即使在下游压力发生变化期间,施加在抛光垫上的压力也会保持不变,由此实现压力的自动调节。[align=center][img=常规研磨机电气比例阀压力控制系统结构,600,280]https://ng1.17img.cn/bbsfiles/images/2022/09/202209150917534790_1434_3221506_3.png!w690x322.jpg[/img][/align][align=center]图1 常规CMP系统中电气比例阀压力控制装置结构示意图[/align]在一些CMP工艺的实际应用中,要求抛光压力具有很高的稳定性,图1所示的常规压力调节装置则无法满足使用要求,这主要体现在以下几方面的不足:(1)电气比例阀的整体控制精度明显不足,其整体精度(包含线性度、迟滞和重复性)往往在1~2%范围内。这种精度水平主要受集成在比例阀内的压力传感器、高速电磁阀和PID控制器性能和体积等因素制约,而且进一步提高的空间非常有限。(2)电气比例阀安装位置与气缸有一定的距离,由此造成比例阀所检测到的压力值并不是气缸的真实压力,而且比例阀处压力与气缸压力之间有一定的时间滞后。为解决上述存在的问题,进一步提高现有CMP工艺设备中压力控制的稳定性,在现有电气比例阀这种单回路PID压力调节技术的基础上,本文将提出升级改造方案,即采用串级控制法(双回路PID控制,也称级联控制),通过在电气比例阀回路中增加更高精度的压力传感器和PID控制器,可以将研磨抛光压力的稳定性提高一个数量级,从1~2%的稳定性提升到0.1~0.2%。[size=18px][color=#990000][b]二、CMP设备压力控制的串级PID控制方案[/b][/color][/size]在传统的CMP设备压力调节过程中,采用电气比例阀进行压力调节的稳定性完全受集成在比例阀内的压力传感器、高速电磁阀和PID控制器性能和体积等因素制约。为了提高压力控制的稳定性,并充分发挥电气比例阀的自身优势,我们采用了一种串级控制技术,即在作为第一回路的电气比例阀中增加第二控制回路,其中第二控制回路由更高精度的压力传感器和PID控制器构成。串级PID控制方案的整体结构如图2所示。[align=center][img=03.超高精密研磨机电气比例阀压力串级控制系统结构,600,333]https://ng1.17img.cn/bbsfiles/images/2022/09/202209150918245058_1534_3221506_3.png!w690x384.jpg[/img][/align][align=center]图2 串级控制法CMP系统压力控制装置结构示意图[/align]在图2所示的串级控制法压力调节装置中,安装了一个外置压力传感器用于直接监测气缸内的气压,压力传感器检测到的气缸压力信号传输给外置的PID控制器,外置PID控制器根据设定值或设定程序将控制信号传送给电气比例阀,比例阀根据此控制信号再经其内部PID控制器来调节高速电磁阀的动作,使得电气比例阀输出到气缸的气体气压与设定值始终保持一致。从上述串级控制过程可以看出,串级控制是一个双控制回路,是两个独立的PID控制回路,电气比例阀起到的是一个执行器的作用。串级控制法(也称级联控制法)是一种有效提升控制精度的传统方法,但在具体实施过程中,需要满足的条件是:[color=#990000]第二回路的传感器和PID控制器(这里是外置压力传感器和PID控制器)精度一般要比第一回路的传感器(这里是电气比例阀内置的压力传感器和PID控制器)要高。[/color]为了实现更高稳定性的CMP系统压力控制,我们推荐的实施方案是采用0.05%精度的外置压力传感器和超高精度PID控制器(技术指标为24位ADC、16位DAC和双浮点运算的0.01%最小输出百分比)。此实施方案我们已经进行过大量考核试验,压力稳定性可以轻松达到0.1%。[align=center]~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~[/align]
求AXIOS机械手的位置校准过程.最近机械手放杯有点偏.但不影响使用.请教各位师傅们如何进行位置调整?先谢谢了.










 我要推广仪器
我要推广仪器
 下载APP
下载APP


