推荐厂家
暂无
暂无

 400-628-5299
400-628-5299
 留言咨询
留言咨询
 留言咨询
留言咨询
 400-860-5168转4131
留言咨询
400-860-5168转4131
留言咨询


[color=#ff0000]摘要:针对目前气腹机的气压和流量调节控制精度较差的问题,本文提出了精度更高的气压和流量控制方法,并详细介绍了控制方法的详细内容和关键部件步进电机驱动比例阀的详细技术指标。通过这种新型的技术手段结合PID控制器可将压力和流量控制精度提高到±2%以内,且能进行任意点设定控制和全程自动运行。[/color][align=center][/align][align=center][color=#ff0000]~~~~~~~~~~~~~~~~~~~~~~~~~[/color][/align][align=center][/align][size=18px][color=#ff0000]一、问题的提出[/color][/size]气腹机是内窥镜腹腔手术时的必备设备,其作用是建立人工气腹,向腹腔内充入一定压力的二氧化碳使腹壁与脏器分开,并保持腹腔内的压力为手术提供足够的操作空间,且可以避免穿剌套管刺人腹腔时损伤脏器。在手术期间,需要根据不同的手术部位、腔体大小、病人体质、成人儿童等情况对二氧化碳的充入量或腹腔压力进行精确和精细化控制。目前市场上各种气腹机的气压和流量调节控制技术指标为:(1)气压调节范围:0~4kPa(30mmHg)。(2)气压控制精度:±15%。(3)流量调节范围:0~30L/min。(4)流量调节精度:±20%。从上述技术指标可以看出,目前气腹机的气压和流量调节精度较差,二氧化碳的排放量也较高。本文将针对气腹机存在的测控精度差的问题,提出精度更高的气压和流量控制方法,并详细介绍了控制方法的详细内容和关键部件步进电机驱动比例阀的详细技术指标。通过这种新型的技术手段可将压力和流量控制精度提高到±2%以内,且能最大限度减少二氧化碳排放量和全程自动运行。[size=18px][color=#ff0000]二、当前气腹机压力和流量控制方法及其改进[/color][/size]目前气腹机的压力和流量调节控制原理基本都基于动态平衡的流量调节法,如图1所示,即在腹腔上插入两根气腹针用作进气和出气通道,通过调节阀改变进气和出气流量使得气体在腹腔内达到一种动态平衡。[align=center][img=气腹机压力控制,500,76]https://ng1.17img.cn/bbsfiles/images/2022/06/202206291707134807_247_3384_3.png!w690x106.jpg[/img][/align][align=center]图1 气腹机压力和流量调节控制原理[/align]由于气腹机的充气压力是略大于一个标准大气压的正压,因此在气腹机控压过程中,只需进气保持固定的微小流量而单独调节出气流量就可将压力精确控制到设定值。如果在按照设定值进行压力控制的同时还需按照要求控制出气流量,则需同时对进气和出气流量进行调节,这在不采用PID控制时很难实现,这也是很多目前气腹机控制精度差的主要原因,因此要保证气腹机压力和流量的控制精度和稳定性,最好能采用PID控制方法对进气和出气流量进行调节。另外,气腹机的控制精度受PID控制算法的影响之外,还会受到进气和出气调节阀的精度和压力传感器测量精度的严重影响。目前压力传感器可以做到很高精度和很小体积的芯片形式,这不在本文讨论范围之内,以下主要讨论调节阀的改进以提高气腹机控制精度。从图1可以看出,在进气和排气端分别配置一个调节阀。目前的调节阀主要有两种形式,一种是开关阀,即通过使阀门高频率的开启和关闭来进行流量调节;另一种是开度阀,即通过改变阀门的开度大小来渐变型的进行流量调节。通过在进气和出气端分别配置高频开关阀确实也能实现腹腔压力精密控制的效果,但无法对出气流量进行准确控制。因此,本文提出的改进方法是采用步进电机驱动的开度阀同时实现压力和流量的精密控制,整个控制装置的结构如图2所示。[align=center][img=气腹机压力控制,600,314]https://ng1.17img.cn/bbsfiles/images/2022/06/202206291707359411_2708_3384_3.png!w690x362.jpg[/img][/align][align=center]图2 改进后的气腹机压力和流量控制装置结构示意图[/align]从图2可以看出,在进行压力控制的情况下,可以固定进气比例阀的开度,PID控制器会根据压力设定值和压力传感器测量值自动调节出气比例阀,使得腹腔压力快速达到设定压力并恒定,同时也会根据腹腔的漏气情况自动调节出气比例阀使得腹腔压力始终保持稳定。在压力和流量同时需要控制的情况下,可以固定出气比例阀的开度(此开度大小根据设定压力和流量计算得到),PID控制器会根据压力设定值和压力传感器测量值自动调节进气比例阀,使得腹腔压力快速达到设定压力并恒定,在压力稳定后相应的出气流量也达到稳定。从上述改进方案可以看出,要实现进气和出气比例阀的同时控制,配置了双通道PID控制器,每一通道都具有正反向控制功能,由此可实现任意设定点的压力和流量自动控制。此改进方案的核心部件是步进电机驱动的小流量比例阀,型号为NCNV-20,其阀芯节流内径为0.9mm、响应时间(全关到全开)为0.8s、耐压为7bar、最大流量为50L/min、流量分辨率为0.1L/min、线性度为±2%、步进电机位移分辨率(单步长)为12.7um、控制信号为模拟信号0~10VDC和工作电源电压24VDC(小于12W)。[size=18px][color=#ff0000]三、总结[/color][/size]本文提出的气腹机压力和流量精密控制改进方案采用了标准的动态平衡控制方法,通过采用进气和出气流量的自动调节、双通道PID控制器和步进电机驱动的小流量比例阀,可同时实现对气腹机压力和流量的精密控制,控制精度可达到±2%以内,且不受腹腔漏气等因素影响。[align=center]~~~~~~~~~~~~~~~~~~~[/align]
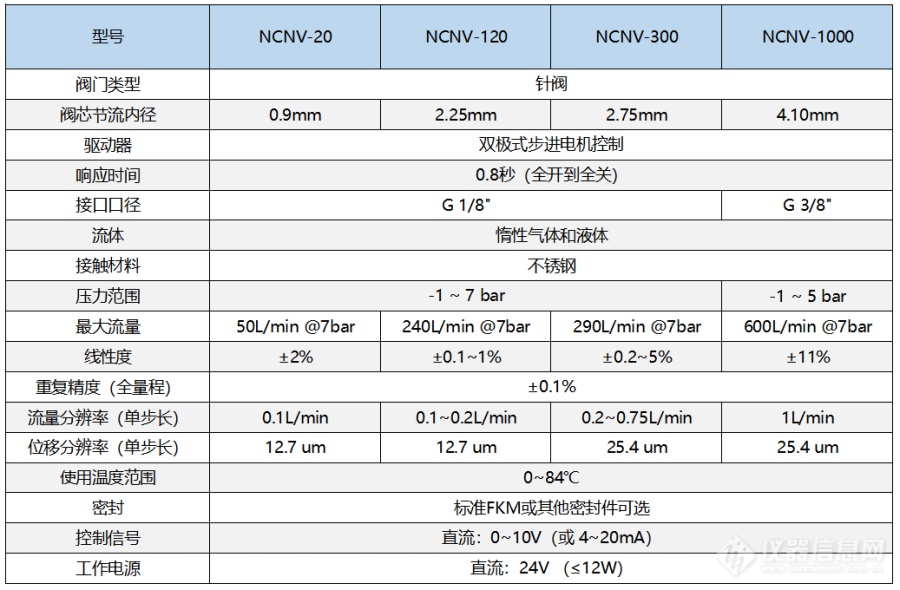
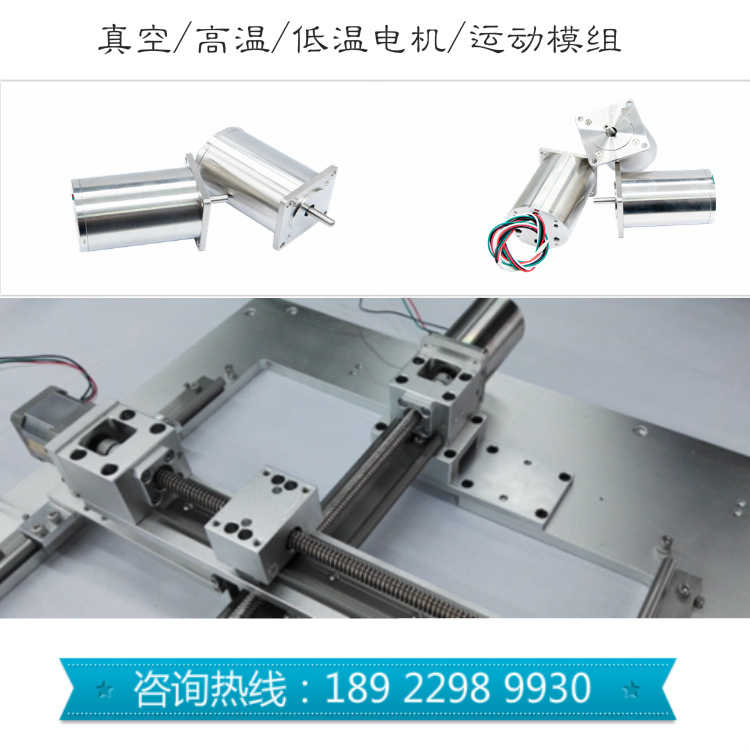
[align=center][img=电动针阀(电动针型阀),599,513]https://ng1.17img.cn/bbsfiles/images/2021/06/202106212250264749_7239_3384_3.gif!w599x513.jpg[/img][/align][size=18px][color=#990000]一、简介[/color][/size] 用于比例流量调节的NCNV系列数控电动针阀将步进电机的精度和可重复性优势与针阀的线性和分辨率相结合,其结果是具有小于2%滞后、2%线性、1%重复性和0.2%分辨率的可调流量控制,使这些电动阀门成为医疗、生命科学和高级自动化应用中一致、高性能气体传输和控制的理想选择,是目前常用电磁比例阀的升级产品。与依阳公司VPC2021系列真空压力控制器相结合,可构成快速准确的闭环控制系统。[size=18px][color=#990000]二、特点和优势[/color][/size] (1)多规格节流面积:从低流量的直径0.9mm(0~50L/min气体)到高流量的直径4.10mm(0到660 L/min气体)的多种规格针阀节流面积,可满足不同的应用需要。 (2)高度线性:小于2%的线性度,简化了查表或外部控制硬件和软件的配套,简化了命令输入和流量输出之间的关系。 (3)高重复性:通过每次达到0.1%的相同流量,NCNV系列电动针阀可提供长期稳定的一致性。 (4)宽压力范围:通过5或7bar巴的真空,取决于孔的大小,入口环境可覆盖宽泛的压力范围。电机的刚度和功率确保阀门在相同的输入指令下打开,与压力无关。 (5)低迟滞:小于2%的迟滞使积分和编程变得简单,在增加和减少达到设定点时能提供一致的流量。 (6)高分辨率:0.2%的分辨率允许NCNV系列电动针阀根据调节指令的微小变化进行最小流量调整,提供了出色的可控性。 (7)快速响应:整个行程时间小于1秒,由此可提供及时快速的流量调节和控制。[size=18px][color=#990000]三、技术指标和尺寸[/color][/size][align=center][size=18px][color=#990000][img=电动针阀技术指标,690,452]https://ng1.17img.cn/bbsfiles/images/2021/06/202106212253271035_4363_3384_3.png!w690x452.jpg[/img][/color][/size][/align][align=center][size=18px][color=#990000][img=电动针阀外形尺寸,690,422]https://ng1.17img.cn/bbsfiles/images/2021/06/202106212253521961_2022_3384_3.png!w690x422.jpg[/img][/color][/size][/align][size=18px][color=#990000]四、驱动模块附件[/color][/size] NCNV 系列数控电动针阀配备了一个步进电机驱动电路模块,以提供了所需电源和控制信号,並以将直流信号转换为双极步进电机的步进控制,同时也可提供 RS485 串口通讯的直接控制。[align=center][img=电动针阀步进电机驱动模块和尺寸,690,219]https://ng1.17img.cn/bbsfiles/images/2021/06/202106212254366571_5829_3384_3.png!w690x219.jpg[/img][/align][size=18px][color=#990000]五、典型应用[/color][/size](1)[url=https://bbs.instrument.com.cn/topic/7801687]用于小流量和真空压力高精度调节的灵巧型数控电动针阀[/url]
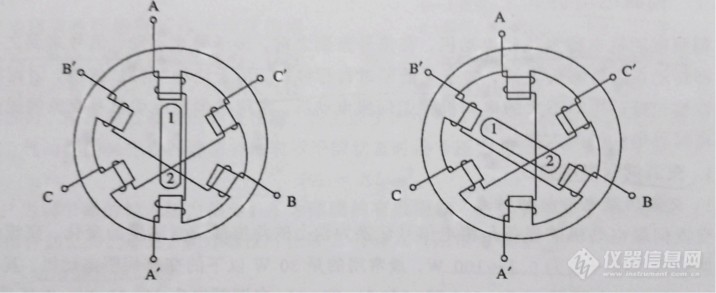
[align=center][font=宋体][font=宋体][url=https://insevent.instrument.com.cn/t/Mp][color=#3333ff]气相色谱仪[/color][/url]常用执行器[/font][font=宋体]——步进电机[/font][/font][/align][align=center][font=宋体]概述[/font][/align][font=宋体]步进电机可以将数字脉冲信号直接转换为固定数值的机械角位移,并可以自动产生定位转矩使转轴锁定的机电转换执行装置。其结构简单、使用方便、容易控制、无位置误差的积累,适用于低速、小功率的数字化驱动系统。现代[url=https://insevent.instrument.com.cn/t/Mp][color=#3333ff]气相色谱仪[/color][/url]的自动进样器、柱箱门控制等部件单元中,较多使用步进电机进行机械部件的驱动和定位。[/font][align=center][font=宋体]简介[/font][/align][font=宋体][font=宋体]步进电机是一种将电脉冲转换为角位移的执行器,向其输入一个脉冲信号时,步进电机就会按照该设定的方向移动一个确定的角度,步进电机的旋转是以固定角度[/font][font=宋体]“一步一步”运行。日常生活中使用的石英表的指针就是靠一种微型的步进电机进行驱动。[/font][/font][font=宋体][font=宋体]目前常用的步进电机分为反应式步进电机([/font][font=宋体]VR)、永磁式步进电机(PM)和混合式步进电机(HB)和单向式步进电机等。[/font][/font][font=宋体][font=宋体]图[/font][font=宋体]1为三相反应式步进电机的原理图,定子安装有星形连接方式的A-A`\B-B`\C-C`三相绕组,转子为磁性材料制成。[/font][/font][align=center][img=,445,182]https://ng1.17img.cn/bbsfiles/images/2023/07/202307192302060299_9313_1604036_3.jpg!w690x282.jpg[/img][font=宋体] [/font][/align][align=center][font=宋体][font=宋体]图[/font][font=宋体]1 三相反应式步进电机原理图[/font][/font][/align][font=宋体][font=宋体]当仅有[/font][font=宋体]A相绕组供电时,气隙磁场与A相绕组重合,如图1左所示,转子受磁场作用下,旋转至与A相绕组轴线对齐的位置,此时转子亦具有自锁功能。如果系统由A相供电转换为B相供电,转子即旋转至与B绕组轴线对齐的位置,如图1右所示。三相绕组轮流通电,定子磁场轴线延A-B-C方向依次旋转60°,步进电机的转子也跟随磁场转过同样角度,该角度称为步距角。如果三相绕组通电的顺序发生改变,步进电机即可反向发生旋转。[/font][/font][font=宋体][font=宋体]步进电机靠转子和定子的两个磁极之间的吸引力实现转动,定子和转子的磁极事先错开一定角度,如图[/font][font=宋体]2所示。实际的步进电机可以采用增加电机相数和电路细分等辅助手段,实现步距角的进一步缩小(可以小于1°),以实现更为精密的角度位移控制。[/font][/font][align=center][img=,234,252]https://ng1.17img.cn/bbsfiles/images/2023/07/202307192302193847_4963_1604036_3.jpg!w351x378.jpg[/img][font=宋体] [/font][/align][align=center][font=宋体][font=宋体]图[/font][font=宋体]2 步进电机的转子和定子示意图[/font][/font][/align][font=宋体]步进电机一般采用开环方式控制,系统向步进电机发出确定的脉冲信号,如果由于外界因素(例如负载较重)发生电机与脉冲不同步现象,电机的转动角度就会发生错误,最终造成步进电机所驱动部件的位置或者位移错误。步进电机作为仪器系统的驱动部件,一般情况下需要与位置传感器共同构成反馈系统,以实现精确可靠的机械运动控制。[/font][font=宋体][font=宋体]自动进样器的传动螺杆、光杠、导轨等部件长期运行后会由于灰尘、油污、腐蚀等原因造成出传动机构阻力较大,可能会导致步进电机驱动中的[/font][font=宋体]“失步”现象。[/font][/font][font=宋体]常用的位置传感器有微动开关、光电传感器、霍尔元件等,用来确定步进电机运行系统的原点或终点。光电码盘、滑动变阻器等传感器与步进电机联合使用,可以实现步进电机的更加精细和精确的运行。[/font][font=宋体] [/font][align=center][font=宋体]小结[/font][/align][font=宋体]简单叙述步进电机工作原理和使用特点。[/font]












 我要推广仪器
我要推广仪器
 下载APP
下载APP