推荐厂家
暂无
暂无
 留言咨询
留言咨询
 金牌2年
金牌2年
 400-860-5168转3783
留言咨询
留言咨询
400-860-5168转3783
留言咨询
留言咨询
 400-860-5168转4032
留言咨询
400-860-5168转4032
留言咨询
 400-860-5168转4032
留言咨询
400-860-5168转4032
留言咨询
 400-860-5168转4032
留言咨询
400-860-5168转4032
留言咨询



针对MAT-271质谱计进样控制系统老化,操作方式繁琐的问题,提出一种基于Linux和MiniGUI的进样控制系统解决方案。利用PC/104主板控制PC/104总线规范的A/D及I/O驱动接口板,在Linux操作系统下,采用MiniGUI设计图形控制界面,通过大尺寸液晶触摸屏控制进样,并实时显示多个参数,实现对现有质谱计进样控制系统的升级改造。应用表明本系统不仅操作简便,而且显示直观,实现进样系统的自动化控制。
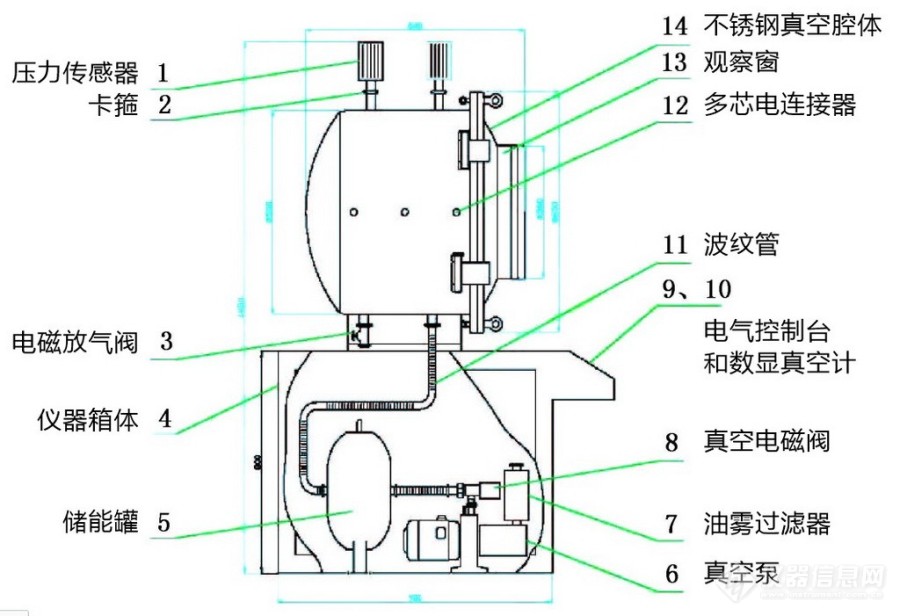
[color=#990000]摘要:针对上一代探空仪检定用低压环境模拟舱压力控制系统控制精度和稳定性差、压力传感器和控制系统配置不合理等问题,用户提出升级改造要求。本文介绍了新一代低压环境模拟舱压力控制系统的实施方案,采用了双向控制模式,进行了方案验证试验,试验结果证明控制精度和稳定性都大幅提高。关键词:低压模拟舱,探空仪,压力控制,电动针阀,电动球阀,上游模式,下游模式,PID控制器[/color][align=center]~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~[/align] [size=18px][color=#990000]一、问题的提出[/color][/size]检定探空仪的重要手段之一是在地面进行低压环境模拟舱的测试,在用的低压环境模拟舱结构如图1所示。[align=center][color=#990000][img=低气压环境模拟舱压力控制,550,376]https://ng1.17img.cn/bbsfiles/images/2022/01/202201061504557090_7216_3384_3.jpg!w690x472.jpg[/img][/color][/align][align=center][color=#990000]图1 低压环境模拟舱结构示意图[/color][/align]此低压环境模拟舱使用过程中存在压力控制波动较大的问题,越靠近1个大气压时波动越大,通过分析认为主要是以下几方面原因引起:(1)压力传感器选择不合理,在全量程压力范围内传感器误差所占比例并不相同,从而显示出靠近1个大气压时波动大和远离1个大气压时波动小的现象,但实际上整体都存在较大波动,只是压力传感器在1个大气压附近精度最高,而在远离1个大气压处压力传感器误差已经完全涵盖了压力波动范围。(2)压力控制采用的是开关控制模式,真空泵和电磁阀根据压力设定值大小同时开启或关闭,尽管增加了储气罐作为缓冲,但这种半自动控制模式很难实现压力的准确恒定。(3)控制器并没有采用PID自动控制方式,也是影响压力控制精度的主要原因。综上分析,针对上一代探空仪检定用低压环境模拟舱压力控制系统控制精度和稳定性差、压力传感器和控制系统配置不合理等问题,用户提出升级改造要求。本文将介绍新一代低压环境模拟舱压力控制系统的实施方案,拟采用双向控制模式,并进行方案验证试验,由此证明控制精度和稳定性能大幅提高。[size=18px][color=#990000]二、压力控制系统升级改造方案[/color][/size]探空仪检定用低压环境模拟舱工作的绝对压力范围为1torr~760torr,要求在此范围内模拟舱的压力可以在任意设定点上准确恒定,甚至要求可以按照设定变压速率进行控制。为此,具体的升级改造方案是在原压力控制系统的基础上,保留真空泵和真空电磁阀,更换压力传感器和控制器,去掉储能罐,增加数控的进气阀和排气阀,具体方案如下:(1)采用10torr和1000torr两个不同量程的电容压力计来覆盖整个低气压范围的测量,从而保证全量程的测量精度。(2)采用高精度PID真空压力控制器,以匹配电容压力计的测量精度和保证控制精度。(3)分别真空腔体的进气口和排气口安装电动针阀和电动球阀,电动针阀直接安装在进气口处,电动球阀安装在排气口和真空泵的电磁阀之间。(4)控制方式分别采用上游模式和下游模式,上游模式用来控制10torr以下气压,下游控制用来控制10~760torr范围气压。(5)如图2所示,上游模式是维持上游压力和出气口流量恒定,通过调节进气口流量控制仓室压力。(6)如图3所示,下游模式是维持上游压力和进气口流量恒定,通过调节排气口流量控制仓室压力。[align=center][color=#990000][img=低气压环境模拟舱压力控制,400,421]https://ng1.17img.cn/bbsfiles/images/2022/01/202201061506055621_2789_3384_3.jpg!w400x421.jpg[/img][/color][/align][align=center][color=#990000]图2 低气压上游控制模式[/color][/align][align=center][color=#990000][img=低气压环境模拟舱压力控制,450,393]https://ng1.17img.cn/bbsfiles/images/2022/01/202201061506206214_771_3384_3.jpg!w450x393.jpg[/img][/color][/align][align=center][color=#990000]图3 低气压下游控制模式[/color][/align][size=18px][color=#990000]三、方案验证试验[/color][/size]针对上述两种控制模式,分别采用1torr和1000torr两只电容压力计、电动针阀、电动球阀和24位高精度压力控制器进行了考核试验,试验用的真空腔体内部空间为400×400×500mm,试验装置如图4和图5所示。[align=center][color=#990000][img=低气压环境模拟舱压力控制,550,369]https://ng1.17img.cn/bbsfiles/images/2022/01/202201061506318858_3696_3384_3.jpg!w690x464.jpg[/img][/color][/align][align=center][color=#990000]图4 低气压上游控制模式考核试验装置[/color][/align][align=center][color=#990000][img=低气压环境模拟舱压力控制,550,339]https://ng1.17img.cn/bbsfiles/images/2022/01/202201061506474377_3818_3384_3.jpg!w690x426.jpg[/img][/color][/align][align=center][color=#990000]图5 低气压下游控制模式考核试验装置[/color][/align]在上游模式试验过程中,首先开启真空泵后使其全速抽气,然后在 68Pa 左右对控制器进行 PID参数自整定。自整定完成后,分别对 12、27、40、53、67、80、93 和 107Pa共8个设定点进行了控制,整个控制过程中的气压变化如图6所示。在下游模式试验过程中,首先开启真空泵后使其全速抽气,并将进气阀调节到微量进气的位置,然后在300torr左右对控制器进行PID参数自整定。自整定完成后,分别对 70、 200、 300、450 和 600Torr 共5个设定点进行了控制,整个控制过程中的气压变化如图7所示。 [align=center][color=#990000][img=低气压环境模拟舱压力控制,550,333]https://ng1.17img.cn/bbsfiles/images/2022/01/202201061507110485_1025_3384_3.jpg!w690x418.jpg[/img][/color][/align][align=center][color=#990000]图6 上游模式低气压定点控制考核试验曲线[/color][/align][align=center][color=#990000][img=低气压环境模拟舱压力控制,550,327]https://ng1.17img.cn/bbsfiles/images/2022/01/202201061507246957_2391_3384_3.jpg!w690x411.jpg[/img][/color][/align][align=center][color=#990000]图7 下游模式低气压定点控制考核试验曲线[/color][/align]将上述不同低气压恒定点处的控制效果以波动率来表示,则得到图8和图9所示的整个范围内的波动率分布。从波动率分布图可以看出,在整个低气压的全量程范围内,波动率可以精确控制在±1%范围,在12Pa处出现的较大波动,是因为采用 68Pa处自整定获得的PID参数并不合理,需进行单独的PID参数自整定。 [align=center][color=#990000][img=低气压环境模拟舱压力控制,550,309]https://ng1.17img.cn/bbsfiles/images/2022/01/202201061507435250_4590_3384_3.jpg!w690x388.jpg[/img][/color][/align][align=center][color=#990000]图8 上游模式低气压定点控制考核试验曲线[/color][/align][align=center][color=#990000][img=低气压环境模拟舱压力控制,550,340]https://ng1.17img.cn/bbsfiles/images/2022/01/202201061507565906_1701_3384_3.jpg!w690x427.jpg[/img][/color][/align][align=center][color=#990000]图9 下游模式低气压定点控制考核试验曲线[/color][/align]从上述考核试验结果可以看出,升级改造后的控制方法可以将压力控制精度和稳定性提高五倍以上,并大幅提高了低压环境模拟仓自动化水平和可靠性。[align=center]=======================================================================[/align]
发酵控制系统的整体设计一、控制系统功能设计为了提高发酵过程的自动化水平,增加发酵产物产量,改善发酵工艺,该发酵控制系统主要完成以下功能:1) 发酵过程完全自动化,包括每阶段的操作动作的实现,即按照工艺要求或者随动控制蠕动泵分别补充碳氮、调整搅拌转速以调整溶氧量浓度,同时当达到发酵要求后,自动切换到下一个阶段;2) 当脱离上位机后,下位机也能够实现简单控制,增加系统的稳定性;3) 对发酵环境敏感因素,即温度T、溶解氧DO、搅拌转速v、酸碱度PH的实时采集,现场和远程显示,Excel文件记录,以及这些数据的历史曲线回顾。二、发酵罐的外围设备该发酵系统除了发酵罐外,还包括辅助的外围设备,对于发酵控制系统开发来说主要有:发酵罐的执行器系统、传感器系统等。1发酵罐的执行器系统发酵罐的执行器系统主要有:1) 搅拌电机转速控制,该电机是交流变频马达,功率1千瓦,电机转速范围是50-1500转/分,变频器的输入信号是4-20 mA直流电流;2) 罐体温控及灭菌,罐体具有双夹套结构,用自带的小型蒸汽发生器产生蒸汽进入外夹套,间接加热罐内发酵液,降温采用市政自来水在内夹套循环的方式;温度范围自来水温度-150摄氏度;3) 酸碱度调节,采用蠕动泵间断加入氨水或氢氧化钠溶液的方式调整;补C、补N,采用蠕动泵分别加入葡萄糖溶液和????溶液的方式来补给;该蠕动泵参数,固定转速50转/分,50 Hz交流230 V供电,功率11W;4) 进气和排气系统为全自动系统。对于本控制系统设计有关的控制量、执行器及控制信号,见下表,表控制量、控制信号与执行器控制量[font=










 我要推广仪器
我要推广仪器
 下载APP
下载APP