推荐厂家
暂无
暂无
 留言咨询
留言咨询
留言咨询
留言咨询
留言咨询
留言咨询

 400-628-5299
留言咨询
400-628-5299
留言咨询
 400-860-5168转4306
留言咨询
400-860-5168转4306
留言咨询
 400-860-5168转1764
留言咨询
400-860-5168转1764
留言咨询






分子荧光若要建立3D谱图,一般需要很快的波长扫描速度,那他的波长扫描机构是什么那??正弦估计不可能的了吧。像他的光栅要转多快啊,一秒钟多少转啊??

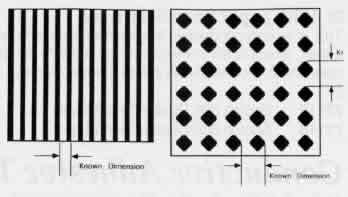
[B][center]作者:anping nemoium [/center][/B]绪:anping老师又提供了一种新的波长扫描机构---凸轮机构,原来的贴名---[B]正弦机构[/B]就不合适了,所以此帖就作为波长扫描机构有关资料的整理贴,大家讨论一下。最后,感谢anping老师的帮助。[color=#00008B][B]关键词[/B]: [/color]波长扫描机构 正弦机构 余割机构 凸轮机构 波长扫描机构 光栅方程[size=4][B]正文[/B][/size] [color=#6495ED][B] 波长扫描机构介绍[/B][/color] 波长扫描机构用于将分光系统分离出来的单色光依序输出并显示其波长值。[B]对波长扫描机构的要求是:使输出光束的波长按线性变化,以获得波长坐标为均匀刻度的谱图。[/B] 常用的波长扫描机构有凸轮机构、正弦机构、余割机构等。扫描机构与光栅座连接,可使光栅工作面绕其中心轴转动。一.正弦机构介绍(一)正弦机构简介 正弦机构是波长扫描机构的一种。 [B]正弦机构能令与单色光衍射角正弦成正比的波长输出读数变成简单的线性。[/B]目前多数[url=https://insevent.instrument.com.cn/t/Wp][color=#3333ff]原子吸收光谱仪[/color][/url]器的波长扫描使用正弦机构。 正弦机构是[B]机械系统中杠杆传动[/B]中的一种。正弦机构具有精密度和可靠性高的特点。[color=#00008B][B](二)正弦机构图示[/B][/color][B]正弦机构的实物图[/B] 图1是上海精科的AA320的背部图。[center][img]http://ng1.17img.cn/bbsfiles/images/2009/01/200901132122_128796_1786353_3.gif[/img][/center][center]图1-a[/center][center][img]http://ng1.17img.cn/bbsfiles/images/2009/01/200901212234_130115_1786353_3.jpg[/img] [/center][center]图1-b anping老师提供[/center]注:图1-b并不是图1-a的内部图。正弦尺的结构示意图如图2、3.[center][img]http://ng1.17img.cn/bbsfiles/images/2009/01/200901132122_128797_1786353_3.gif[/img][/center][center]图2[/center][center][img]http://ng1.17img.cn/bbsfiles/images/2009/01/200901132122_128798_1786353_3.gif[/img][/center][center]图3-a[/center][center][img]http://ng1.17img.cn/bbsfiles/images/2009/01/200901212235_130116_1786353_3.jpg[/img] [/center][center]图3-b anping老师提供[/center][color=#6495ED][B](三)正弦机构的工作原理[/B][/color] 如图3-a,光栅平面转动中心与一被称为正弦尺的金属杆的A端连接,杆的B端装有滚动轴承, 正弦尺的A点到B点距离,即光栅平面转动中心与轴承转动中心间距离,设为L。滚动轴承靠近丝母C的端面,当精密丝杆转动时,使螺母沿丝杆移动,X值(丝母沿丝杆移动的距离)变化,最终推动正弦杆带着光栅绕其中心轴转动,从而AB线和CA线间的夹角即光栅的衍射角β随之改变。以图1-b为例来说明:波长马达通过传动皮带驱动精密丝杆转动,丝杆带动滑块移动,由于正弦臂杆是靠在滑块上的,所以正弦臂杆也跟着转动,从而带动光栅转动。 [color=#00008B][B](四)波长的线性化[/B][/color] 图3-a的简化图如图4。为了便于说明,以下的说明基于李特洛型光栅单色器或者闪耀光栅。[center][img]http://ng1.17img.cn/bbsfiles/images/2009/01/200901132122_128799_1786353_3.gif[/img][/center][center]图4[/center] [B]光栅型单色器依据的原理是光栅方程 mλ=d(sinα+sinβ)。[/B] [B]光栅方程[/B] [color=#DC143C] mλ=d(sinα+sinβ)[/color] m为光谱级次,λ为衍射光波长,d光栅常数,α为入射角,β为衍射角。 入射角α和衍射角β的正负号规定为:衍射光和入射光在法线的同一侧时,入射角和衍射角同号,否则异号。 m=0为零级光,零级光两侧均有光谱,m0的为正级光谱,m0的为负级光谱。光栅方程mλ=d(sinα+sinβ),可以写成 mλ = 2 * d * sin[(α+β)/2] * cos[(α-β)/2] 式1-1设计单色器系统以使上式简化,对于正弦机构,设计机构,使 (α-β)为一常数。 [color=#6495ED][B]对于李特洛型光栅单色器或者闪耀光栅,衍射角β和入射角α相等,即α=β。[/B][/color][center][img]http://ng1.17img.cn/bbsfiles/images/2009/01/200901132123_128800_1786353_3.gif[/img][/center][center]图5[/center] 式1-1简化为: [center] mλ=2d(sinβ) 式1-2[/center] 根据图4可以看出, [center]sinβ = X / L 式1-3[/center] 得 [center]mλ = 2d(X/L) 式1-4[/center] 对于一定的光谱级次m和固定的正弦杆长度L;对于固定的光栅,d固定。 可以看到 [color=#00008B][center]λ = KX 式1-5[/center][/color] [color=#DC143C] 衍射波长λ和丝母沿丝杆移动的距离X成正比。[/color]这意味着波长随丝杆转动而线性变化,从而使波长读数值呈线性变化成为可能,如图1-b, 7.5nm/周,波长被线性化了。 现代仪器一般采用精密步进电机驱动丝杆,如图1-b,步进电机转动的角度由微处理器计算,这样也就可以算出相应的波长。 参考文献:1. [url=https://insevent.instrument.com.cn/t/Wp][color=#3333ff]原子吸收光谱仪[/color][/url] 章诒学 何华焜 陈江韩2. 光学原理与应用 廖延彪3. 精密机械设计 徐峰4. WGD-8A多功能光栅光谱仪结构和原理5. 上海精科AA320使用说明书6. 光谱仪器原理 后记:现在想想以前看见别的师傅在做[url=https://insevent.instrument.com.cn/t/Wp][color=#3333ff]原子吸收[/color][/url]波长校正时,调节正弦尺,用游标卡尺量距离,我想是确定光栅的初始角度。如图1-b中的12.667,用游标卡尺就是确定这个距离。有了这个距离,仪器在初始化时,可以确定各个波长时光栅要转过的角度,如图1-b左下角表格。为了确定波长和角度的关系,必须有个参考位置,参考位置可以是零级光或者闪耀波长处,有了参考位置,由于光路、光学组件固定,光谱图中各个波长的间距是可以计算出来的。当然,前提是必须找到参考位置,仪器驱动步进电机必须在某个步数内找到零级光或者闪耀处,用游标卡尺量就是使光栅的初始角度能使仪器在指定步数内找到零级光或闪耀处。另附分光光度计723的波长自动定位原理。[center][img]http://ng1.17img.cn/bbsfiles/images/2009/01/200901141807_128919_1786353_3.gif[/img][/center][center]图6[/center]注,由于723中未采用正弦机构,所以,723计算机输出与波长成正弦关系的脉冲步进数。[center][img]http://ng1.17img.cn/bbsfiles/images/2009/01/200901141807_128920_1786353_3.gif[/img][/center][center]图7[/center][size=3][B]二.凸轮机构介绍[/B][/size][color=#6495ED][B](一)凸轮机构简介[/B][/color] 作为一种机械构件,凸轮机构的特点是:只要选择合适的凸轮轮廓曲线,就可以使从动件(这里可以简单理解为光栅)的位移、速度、加速度严格的按照预订的规律变化,而机构却比较简单紧凑。 尤其在主动件(驱动凸轮机构)作连续运动,而从动件必须做重复往复运动时,用凸轮机构实现预定的运动规律最简单。[color=#6495ED][B](二)凸轮机构示意图[/B][/color][center][img]http://ng1.17img.cn/bbsfiles/images/2009/01/200901201936_129997_1786353_3.gif[/img][/center][center]图8 凸轮机构简视图[/center][center][img]http://ng1.17img.cn/bbsfiles/images/2009/01/200901201940_129999_1786353_3.gif[/img][/center][center]图9 凸轮波长扫描机构未加注释 anping老师提供[/center][center][img]http://ng1.17img.cn/bbsfiles/images/2009/01/200901201941_130000_1786353_3.gif[/img][/center][center]图10 凸轮波长扫描机构加了注释 anping老师提供[/center]图10中的光电断续器一般由发光二极管和光敏三极管组成,这样,当凸轮旋转时,挡光板不断的遮住光,微处理器就可以检测到一串脉冲串了,就是图中所说的pulse。如图中的,0~200nm,355pulse ,可能是指凸轮转到200nm时,光电断续器输出355个脉冲。200nm~900nm,3500pulse,就是输出3500个脉冲了。图中的,cam : 0.2nm/nm 、4.800 pulse(one rotation) ,其中 0.2nm/nm不知道什么意思。是凸轮曲线每走1nm,波长变化0.2nm吗?? 4.800pulse是不是应该为4800pulse??是说凸轮转动一圈(one rotation)光电断续器输出4800个脉冲??Gear ratio :1/6就是指,大小齿轮的齿轮数比。[center][img]http://ng1.17img.cn/bbsfiles/images/2009/01/200901201941_130001_1786353_3.gif[/img][/center][center]图11 凸轮机构实物图 anping老师提供[/center]具体的凸轮机构的波长线性方法,请参考《光谱仪器原理》这个附件的第211页。[size=3][B]三.余割机构介绍[/B][/size]待整理.......
条码扫描模组在外国已经使用很久了,现在已经发展到中国内部。这种技术的发明带来了更多的工作改革潮流。促进了自动化的步伐,大大简化人类工作流程,减少更多的脑力负担。扫描模组属于二次开发产品,兼备识别条码并加以扫描和解码的功能,然后还可以植入更多的应用行业的功能程序。外形构造小巧,高度集成材料,可以置入手机、平板电脑,打印机和一些医疗设备等各行各业的机械设备中。一般情况,条码扫描模组分为二大类,第一个就是激光扫描模组,第二个就是红光扫描模组。 现在对激光扫描模组进行分析下,激光扫描模组是通过辐射出一个激光光源点,然后按照激光发射的原理打成激光光线照遭条码上,在经过解码转化成为数字信号,加而给电脑读取信息。但是相对于红光扫描模组来说就比价精确点了。在强烈的阳光下,一般情况都是用激光扫描模组,因为红光不是红外线,就是单单的红色的光。阳光中可以算什么光线都有,会对红光扫描模组发射出来的LED灯光造成很大的影响,导致扫描的结果不准确。 如果在结构上来说呢,红光扫描模组要比激光扫描模组好一点而且价格实惠。激光扫描模组里面的结构是靠点胶固定的机械装置,因此就有很大的结构固定,易碎行,抗硬性就不是很好了。红光扫描模组里面就没有一些所谓的机械装置固定,所以耐用性比价好,但是总体来说,激光扫描模组的用途是比较多的,红光的就有很多局限性。看个人的用处所在. 本文出自 www.yuanjingda.com 转载请注明出处!








 我要推广仪器
我要推广仪器
 下载APP
下载APP