推荐厂家
暂无
暂无
 留言咨询
留言咨询
留言咨询
留言咨询
留言咨询
留言咨询

 400-668-7609
留言咨询
400-668-7609
留言咨询







[font=宋体]液位传感器是一种常用于检测液体高低状态的传感器,它在消杀机器人上有着广泛的应用。消杀机器人是一种用于消毒和杀菌的自动化设备,液位传感器在其中起到了重要的作用。[/font][font=宋体]液位传感器内置了光学电子元件,这使得它具有体积小、功耗低的特点。这对于消杀机器人来说非常重要,因为机器人需要在有限的空间内工作,并且需要长时间运行,低功耗的传感器可以延长机器人的工作时间。[/font][font=宋体]液位传感器无机械运动,这意味着它没有易损件,寿命长。这对于消杀机器人来说非常有利,因为机器人需要在恶劣的环境下工作,长寿命的传感器可以减少维修和更换的频率,提高机器人的可靠性和稳定性。[/font][align=center][img=光电液位传感器,598,300]https://ng1.17img.cn/bbsfiles/images/2023/09/202309051623105238_1900_4008598_3.jpg!w598x300.jpg[/img][/align][font=宋体]液位传感器具有[/font]IP68[font=宋体]防水等级,这意味着它可以在潮湿的环境下正常工作。在消杀机器人中,液位传感器需要接触到液体,因此防水性能非常重要,可以保证传感器的正常运行。[/font][font=宋体]液位传感器支持个性化机型定制。消杀机器人的设计和应用场景各不相同,因此需要根据具体需求进行定制。液位传感器的个性化定制可以满足不同机器人的需求,提供更好的适配性和可扩展性。[/font][font=宋体][url=https://www.eptsz.com]液位传感器[/url]在消杀机器人上具有体积小、功耗低、寿命长、防水等级高以及支持个性化定制等优势。它可以准确检测液体的高低状态,为消杀机器人提供重要的液位信息,从而实现高效、精确的消毒和杀菌操作。[/font]

[font=宋体]液位传感器是一种常用于检测液体高低状态的传感器,它在消杀机器人上有着广泛的应用。消杀机器人是一种用于消毒和杀菌的自动化设备,液位传感器在其中起到了重要的作用。[/font][font=宋体]液位传感器内置了光学电子元件,这使得它具有体积小、功耗低的特点。这对于消杀机器人来说非常重要,因为机器人需要在有限的空间内工作,并且需要长时间运行,低功耗的传感器可以延长机器人的工作时间。[/font][font=宋体]液位传感器无机械运动,这意味着它没有易损件,寿命长。这对于消杀机器人来说非常有利,因为机器人需要在恶劣的环境下工作,长寿命的传感器可以减少维修和更换的频率,提高机器人的可靠性和稳定性。[/font][align=center][img=光电液位传感器,601,371]https://ng1.17img.cn/bbsfiles/images/2023/09/202309051537178409_8006_4008598_3.jpg!w601x371.jpg[/img][/align][font=宋体]液位传感器具有[/font]IP68[font=宋体]防水等级,这意味着它可以在潮湿的环境下正常工作。在消杀机器人中,液位传感器需要接触到液体,因此防水性能非常重要,可以保证传感器的正常运行。[/font][font=宋体]液[url=https://www.eptsz.com]位传感器[/url]支持个性化机型定制。消杀机器人的设计和应用场景各不相同,因此需要根据具体需求进行定制。液位传感器的个性化定制可以满足不同机器人的需求,提供更好的适配性和可扩展性。[/font][font=宋体]液位传感器在消杀机器人上具有体积小、功耗低、寿命长、防水等级高以及支持个性化定制等优势。它可以准确检测液体的高低状态,为消杀机器人提供重要的液位信息,从而实现高效、精确的消毒和杀菌操作。[/font]
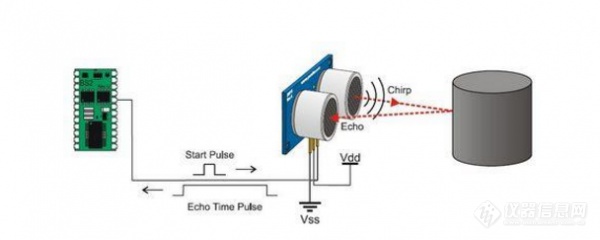
随着计算机技术、传感器技术、人工智能的发展,移动机器的避障及自主导航技术已经取得了丰硕的研究成果,应用领域也在不断地扩大,应用复杂程度也越来越高。移动机器人的自主寻路要求已经从之前简单的功能实现提升到可靠性、通用性、高效率上来,因此对其相关技术提出了更高的要求。避障可以说是各种机器人最基本的功能,不然机器人一走动就碰到花花草草就不好了。机器人并不一定要通过视觉感知自己前方是否有障碍物,它们也可以通过触觉或像蝙蝠那样通过声波感知。因此,检测机器人前方是否存在障碍物的传感器,可以分为接触式和非接触式的。[align=center][img=,600,240]http://ng1.17img.cn/bbsfiles/images/2018/01/201801221518546287_2141_3345088_3.png!w600x240.jpg[/img][/align]接触式测障传感器便是碰撞开关(图1)。碰撞开关的工作原理非常简单,完全依靠内部的机械结构来完成电路的导通和中断。当碰撞开关的外部探测臂受到碰撞,探测臂受力下压,带动碰撞开关内部的簧片拨动,从而电路的导通状态发生改变(图2)。[align=center][img=,342,300]http://ng1.17img.cn/bbsfiles/images/2018/01/201801221519129947_2908_3345088_3.png!w342x300.jpg[/img][/align]非接触式测障开关一般的工作原理与声纳和雷达相似,发射声波或某种射线,遇到障碍物,声波或射线被反射回来,并被传感器接收,这时传感器就认为发现了障碍物。此外超声波传感器也是移动机器人避障、测距常用传感器之一。超声波传感器是一个电子模块,测量距离在3cm到400cm之间。它可以用于帮助机器人避开障碍物,或用于其他相关项目的距离测量和避障工程。超生波传感器检测距离原理是测出发出超声波并在发射时开始计时,超声波在空中传播,在遇到障碍物时立即返回,超声波接收器接收到反射波时立即停止计时。 声波在空中的传播速度为340米/秒。 使用定时器记录的时间t计算出发点到障碍物的距离s,即s = 340×t / 2。由于超声波在空气中的速度与温湿度有关,在比较精确的测量中,需把温湿度的变化和其它因素考虑进去。超声波传感器一般作用距离较短,普通的有效探测距离都在5-10m之间,但是会有一个最小探测盲区,一般在几十毫米。由于超声传感器的成本低,实现方法简单,技术成熟,是移动机器人中常用的传感器。但是传感器安装在机器人上时距离地面不能太近,太近容易产生干扰信号,而且容易将可以翻越的障碍物当成无法逾越的障碍物。传感器两探头间的距离不能太远也不能太近,太远测量误差过大,太近串扰信号过强。关于机器人测距、避障工釆网小编推荐MaxBotix [b]机器人超声波传感器[/b] - MB7066[align=center][img=,291,293]http://ng1.17img.cn/bbsfiles/images/2018/01/201801221519353397_4049_3345088_3.png!w291x293.jpg[/img][/align]机器人超声波传感器 - MB7066是一种坚固的超声波传感器组件模块。这种户外传感器提供了很短的远距离探测,并在一个紧凑、坚固的PVC外壳中进行测距。超声波传感器符合IP67进水标准,符合标准电气3 / 4英寸PVC管件。是我们最长的户外、耐气候【(IP67),可选的化学抗性f选项】、超声波传感器,专为您的项目或产品的简单集成而设计其中42kHz超声波传感器测量距离物体的距离最大范围1068厘米(450英寸),操作温度为-40˚ C + 70˚ C(-40˚ F + 160˚ F)。在高输出声功率与连续可变增益、实时背景自动校准、实时波形特征波形特征分析、噪声抑制算法等都能有效地实现无噪声距离读数。即使在许多声学或电子噪声源存在的情况下,这种情况也是成立的。机器人超声波传感器是用于匹配窄传感器束模式的工厂,并提供可靠的远程探测区域。










 我要推广仪器
我要推广仪器
 下载APP
下载APP