

图:XTDP系统硬件 图:系统软件界面

图:摄影测量原理
| 指标名称 | 技术指标 | |
| 1. | 核心技术 | 工业近景摄影测量 |
| 2. | ※测量结果 | 三维坐标、三维位移 |
| 3. | 测量幅面 | 支持几十厘米到几十米的测量幅面 |
| 4. | 测量相机 | 支持多种单反、工业相机图像计算 |
| 5. | ※相机数目 | 支持单个相机或多个相机图像同时计算,提高大型工件的测量效率 |
| 6. | 相机标定 | 软件自标定,支持多种相机镜头畸变模型 |
| 7. | 测量精度 | 最高±0.015mm/m |
| 8. | ※标志点类型 | 支持10、12、15位编码点,支持黑底白点、白底黑点,更多类型可定制 |
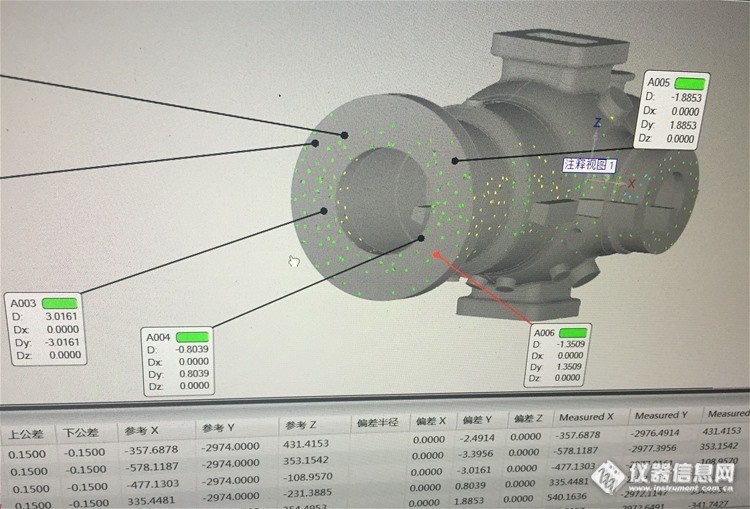
| 9. | ※静态变形分析 | 通过多次测量不同变形状态下的观测标志点三维坐标,可以进行关键点三维变形偏差计算和色谱图分析;位移测量结果在三维视图中以射线和色谱形式绘制,真实表达三维点的变形与运动 |
| 10. | ※三维数模对比 | 可以对被测工件与CAD数模进行三维几何形状比对,快速方便地进行大型工件的产品外形质量的检测支持stl,iges,step等多种数模文件格式,对比结果三维彩色显示 |
| 11. | ※厚度补偿功能 | 具备编码点及非编码点厚度自动补偿功能 |
| 12. | ※坐标转换功能 | 321转换、参考点拟合、全局点转换、矩阵转换等多种坐标转换功能 |
| 13. | ※元素创建功能 | 可以创建三维点、线、面、圆、槽孔、矩形孔、球、圆柱、圆锥等多种三维元素 |
| 14. | ※分析创建功能 | 可以创建点点距离、点线距离、点面距离、线线夹角、线面夹角、面面夹角等多种分析 |
| 15. | ※多核加速 | 多核CPU并行运算,提高系统解算速度 |
| 16. | 系统兼容性 | 兼容32位、64位系统 |
| 17. | 系统扩展接口 | 可配合XTOM型三维光学面扫描系统使用,提高大型工件的拼接精度 |