
北方华创“半导体工艺设备及其运动部件的控制方法和装置”专利获授权
导读:北京北方华创微电子装备公司获得专利,新方法优化半导体工艺设备中运动部件控制,可以提高运动部件的利用率,缩短相应动作任务的执行时间,从而缩短工艺任务的总执行时间,提高相应机台产能。
天眼查显示,北京北方华创微电子装备有限公司近日取得一项名为“半导体工艺设备及其运动部件的控制方法和装置”的专利,授权公告号为CN113488410B,授权公告日为2024年7月23日,申请日为2021年6月25日。
背景技术
在半导体工艺设备(例如晶圆清洗设备)中,上位机主要包括协调模块(Coordinator)和调度模块(Scheduler)。调度模块用于根据协调模块输入的机台信息,计算工艺任务(Job)的优化执行序列,保障机台产能;协调模块用于与调度模块交互,接收从调度模块输出的动作任务序列,并控制下位机(如传输控制模块和/或工艺控制模块等)完成对应的工艺任务。上位机中控制软件的核心功能之一是对工艺任务的控制,在执行工艺任务的过程中,会不断收到来自调度模块输出的动作序列,协调模块会将动作序列中的动作任务分配给对应的运动部件(比如机械手或者槽盖)执行动作。
具体可以参考图1所示,调度模块输出的工艺任务包括多个动作任务(Move):如图1中Move1、Move2、…、MoveN;各个动作任务包括至少一个设计好了执行顺序的子动作对象(Action):如图1中Move1包括Action11和Action12,Move2包括Action21、Action22和Action23;针对每个子动作对象,协调模块会将具体要执行的动作名称及参数发送给对应的运动部件(Module),由对应的运动部件执行各个子动作对象:如图1所示Move1中Action11由Module1执行,Action12由Module2执行,Move2中Action21由Module1执行,Action22和Action22均由Module2执行。其中,每个动作任务开始执行前,协调模块会将该动作任务包含的所有子动作对象涉及到的运动部件置为占用,直到该动作任务包含的所有子动作对象都执行完,相关运动部件才会被释放。运动部件可以持续扫描自己是否有子动作对象需要执行,但只会执行把自己置为占用的动作任务中的子动作对象。这种设计可以在一定程度上保证上一个动作任务的所有子动作对象没有完全执行完前,相关运动部件不会去执行其它动作任务的子动作对象,使各个动作任务之间的子动作对象互不干涉。然而,上述动作任务在执行过程中,对运动部件的占用机制过于绝对,容易导致运动部件的利用率低,从而可能影响对应的机台产能。
发明内容
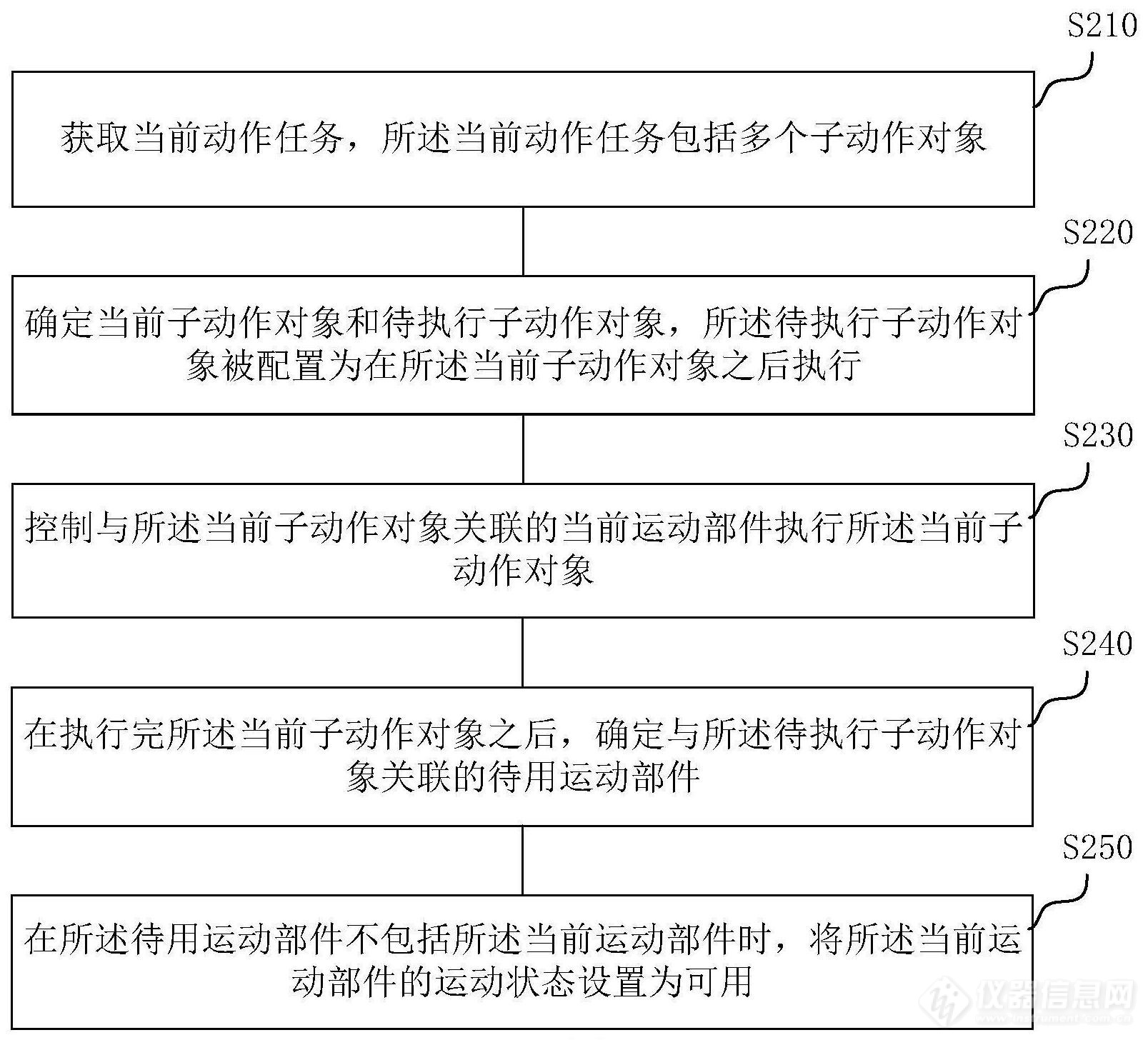
本申请公开一种半导体工艺设备及其运动部件的控制方法和装置,其中控制方法包括:获取当前动作任务,所述当前动作任务包括多个子动作对象;确定当前子动作对象和待执行子动作对象,所述待执行子动作对象被配置为在所述当前子动作对象之后执行;控制与所述当前子动作对象关联的当前运动部件执行所述当前子动作对象;在执行完所述当前子动作对象之后,确定与所述待执行子动作对象关联的待用运动部件;在所述待用运动部件不包括所述当前运动部件时,将所述当前运动部件的运动状态设置为可用。其可以提高运动部件的利用率,缩短相应动作任务的执行时间,从而缩短工艺任务的总执行时间,提高相应机台产能。
来源于:仪器信息网


Jansky
总阅读量 0
相关阅读


议程发布!2024半导体设备与核心部件投融资论坛
Jansky

仪器优选·其他半导体检测仪
更多


近期会议
更多


热门评论
最新资讯
新闻专题
更多推荐
