推荐厂家
暂无
暂无
 留言咨询
留言咨询
留言咨询
留言咨询
留言咨询
留言咨询

 400-883-7896
留言咨询
400-883-7896
留言咨询
 留言咨询
留言咨询
 400-860-5168转4470
留言咨询
400-860-5168转4470
留言咨询






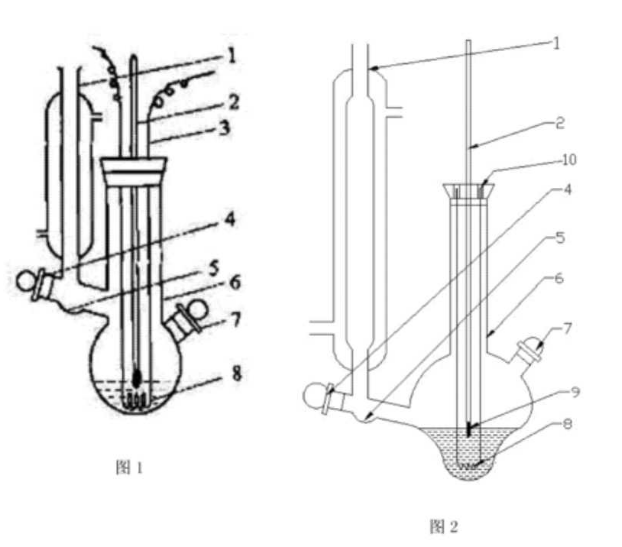
各位老师:你们好!我正在学习砝码和机械天平规程,应该说该两规程在采用不确定度方面起了带头作用。这样能使我们消除过去的埋怨:不确定度不好学,又学而无用。但不知为什么?该两规程对于衡量仪器的平衡位置读数规定却让规程执行者犯愁:1、JJG99-2006《砝码》:摆动式衡量仪器:开启天平后,经过一个半周期之后,连续3次或4次回转点读数按公式I=(i1+2 i2+ i3)/4计算。2、JJG98-2006《机械天平》:无阻尼器普通标尺天平以连续3次回转点读数计算天平的平衡位置。用3次回转点读数计算天平平衡位置的公式为:I=(i1+2 i2+ i3)/4。前者说了开启天平后,经过一个半周期之后,连续3次回转点读数按公式I=(i1+2 i2+ i3)/4计算,但又来个“或4次”,让规程执行者怎样去执行这“或4次”;而后者说以连续3次回转点读数计算天平的平衡位置,但没有说明是以那连续3次回转点读数。 当然规程执行者可以不理睬该“或4次”,但作为计量工作的技术法规——国家计量检定规程,多余这“或4次”,自然要使作为技术法规的国家计量检定规程,在规程执行者心目中的形象受到损伤。对于后者是否也是按开启天平后,经过一个半周期之后的连续3次回转点读数?请指教!
各位老师:你们好!我正在学习砝码和机械天平规程,应该说该两规程在采用不确定度方面起了带头作用。这样能使我们消除过去的埋怨:不确定度不好学,又学而无用。但不知为什么?该两规程对于衡量仪器的平衡位置读数规定却让规程执行者犯愁:1、JJG99-2006《砝码》:摆动式衡量仪器:开启天平后,经过一个半周期之后,连续3次或4次回转点读数按公式I=(i1+2 i2+ i3)/4计算。2、JJG98-2006《机械天平》:无阻尼器普通标尺天平以连续3次回转点读数计算天平的平衡位置。用3次回转点读数计算天平平衡位置的公式为:I=(i1+2 i2+ i3)/4。前者说了开启天平后,经过一个半周期之后,连续3次回转点读数按公式I=(i1+2 i2+ i3)/4计算,但又来个“或4次”,让规程执行者怎样去执行这“或4次”;而后者说以连续3次回转点读数计算天平的平衡位置,但没有说明是以那连续3次回转点读数。 当然规程执行者可以不理睬该“或4次”,但作为计量工作的技术法规——国家计量检定规程,多余这“或4次”,自然要使作为技术法规的国家计量检定规程,在规程执行者心目中的形象受到损伤。对于后者是否也是按开启天平后,经过一个半周期之后的连续3次回转点读数?请指教!
当你想购买一台传动轴平衡机的时候,面对市场上各种各样的平衡机和相差悬殊的价格,你可能会感到迷惑不解。即使你已经使用了多年平衡机,也不一定很清楚它们的真正区别。如果只听厂家的介绍,就可能花高价钱买回一个不适合自己的平衡机。下面小编就用户经常提出的几个问题,作一些简单介绍,供你选购时参考。 软支承和硬支撑的区别 http://img.hc360.com/auto-m/info/images/200908/200908191703293518.jpg 动平衡机分软支承和硬支撑两种。两者相比,软支承平衡机的摆架比较软。在传动轴启动和停转的过程中,软支承的摆架会有非常明显的振动,硬支承的摆架则没有这种现象。从理论上说,软支承平衡机可以获得更高的测试精度。但是,这只是在极其精密的测试中才能区分出来。对于传动轴平衡机来说,硬支承所能达到的精度也远远超出了实际需要。如果发现一台传动轴平衡机的精度不能满足要求,那一定是其它因素造成的结果。在影响平衡精度的因素中,软、硬支承只是一个微不足道的因素。精度高低的影响因素 由于所有厂家都采用了微电脑技术,技术已经非常成熟,电子测量部分产生的误差已经微乎其微,传动轴平衡机的精度高低与电子部分的关系已经很小。而主要影响因素有两项,1、传动轴与平衡机的联接方式。2、平衡机主轴加工精度。 减重率的影响因素 如果平衡机的减重率比较高,就可以用较少的转动次数完成平衡,干活快。减重率高低的影响因素有:1、平衡机的定标是否准确。2、操作时放置的平衡块重量和位置是否准确。3、传动轴十字轴和伸缩滑键的间隙大小。 低转速和高转速 采用软支承的平衡机,转速必须达到共振转速的3倍以上才能检测(转速越高减重率越高),所以一般都采用较高的转速。硬支承的平衡机,转速必须在共振转速的3倍以下才能工作,所以一般都采用较低的转速(特别是重型传动轴)。转速的高低还与采用的传感器的灵敏度有关,如果采用灵敏度高的传感器,就可以采用较低的转速。在维修行业,如果采用较低的转速,司机往往会怀疑平衡的效果,所以有了提高转速的趋势。在平衡重型传动轴的时候,硬支撑平衡机的转速一般较低,司机容易怀疑平衡的效果,这才导致了软支承平衡机的畅销。你在购买平衡机的时候,不要只问机器能达到多高的转速,一定要问清楚平衡斯太尔等大传动轴时能达到的转速。 数字显示和瓦特表显示 平衡机的性能与显示方法基本上无关,但是数字显示不但直观,而且可靠性最高,不容易损坏,还可以提供一些很实用的附加功能,所以数字显示是主流方向。瓦特表显示方法会逐渐退出市场。也有使用电脑显示器的平衡机,它唯一的优点是显得比较气派,适合于大用户,但是它的复杂度要高很多倍,因此可靠性会大幅度下降(越是复杂的东西越容易出故障),小用户应该避免选用 。 不同的联接方式区别 这里所说的连接方式是指前传动轴(或者中传动轴)的后端(有过桥轴承的一端)与平衡机的联接方式。这个问题是平衡机性能的关键,忽视了这个问题,是选购平衡机的大忌。现在已经有的联接方式有以下几种: 第一种是双滚轮支承,一般为硬支撑平衡机,这种方式的精度较好。缺点是工作时不能监测过桥轴承的状态,不能反映突元叉的偏心(参见后面介绍),也不便于检测中突元的跳动量。 第二种是直接用过桥轴承吊架支承,这种方式与实际工况最接近,平衡效果最好。而且它能够很方便地检测中突元的跳动量,还能监测过桥轴承的扭摆和噪音。有时还能避免拆装过桥轴承,干活最省力。 第三种是直接用中突元联接,中突元与右摆架直接螺栓联接,这是一种最错误的方案。对于这种平衡机,您自己多做几个实验您就会发现它的问题有多么严重。您把前传动轴装到平衡机上,按照图3所示,用百分表检查(过桥轴承)轴颈的跳动量,这个跳动量的大小,就决定了平衡的最终效果。这里有多大的跳动量,就相当于平衡机的主轴有多大的跳动量。平衡的时候,中突元止口的中心是转动的中心,等装到汽车上以后,转动中心又变成了过桥轴承的轴心(A点)。平衡时的轴心与实际工作的轴心不一致,必然会造成误差。大量的维修数据证明,这种轴心变换造成的误差通常在30到100克之间。使用这种平衡机的时候,您还会发现一个奇怪的现象,如果中突元的滑键配合较紧,平衡的效果会很差,甚至根本无法平衡。因为这种平衡机必须借助中突元滑键的配合间隙才能解决运动干涉,滑键没有间隙就会别劲,自然就无法工作。 为了在平衡前传动轴时也能得到理想的效果,选择连接方式时要特别慎重。为了既适合前轴又适合后轴,平衡机最少要有三个摆架,这是最起码的要求。 机座的重量 应该说,不管是什么平衡机,机座的重量越大越好。但需要指出,机座的重量对平衡精度并无影响,它主要是影响减重率。在要求同样的效果时,软支撑平衡机的底座比硬支撑的可以减轻数倍。现在,机座的成本在平衡机的总成本中占有很大的比例。所以,在您对价格比较在意时,应该优先选用软支承平衡机。









 我要推广仪器
我要推广仪器
 下载APP
下载APP



