推荐厂家
暂无
暂无
 留言咨询
留言咨询
留言咨询
留言咨询
留言咨询
留言咨询
 400-628-5299
留言咨询
400-628-5299
留言咨询
 400-628-5299
留言咨询
400-628-5299
留言咨询
 留言咨询
留言咨询






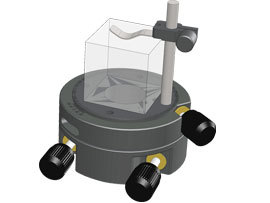
Zeta-200是集三维成像和计量功能于一身的先进自动化表面测量系统。它功能配备齐全、使用方便,是自动三维测量系统中性能价格比最优的选择。Zeta-200能够自动采集样品上多点的工艺参数,如台阶高度、体积、尺寸及粗糙度等,为您提供监控及优化生产流程所需的数据。典型的系统配置包括:放大倍数为5倍, 10倍, 20倍, 50倍, 100倍的物镜1/3英寸CCD相机; 0.5倍耦合镜自动Z轴,30毫米驱动范围自动XY载物台,200毫米x 200毫米驱动范围具有3GB内存和320GB硬盘的电脑,24英寸显示器,以及泽塔三维功能软件
Zeta 200自动三维测量系统Zeta 200是集多种测量手段于一身的高级表面测量系统。它功能配备齐全,使用方便,是三维测量系统中性能价格比最优的选择。Zeta 200能够自动采集样品上多点的工艺参数,如台阶高度、体积、尺寸及粗糙度等,为您提供监管及优化生产流程所需的数据。· 自动多点、多配方测量样品· 200毫米x200毫米XY轴驱动范围· 粗糙表面成像与分析· 金属栅线形状与尺寸测量· 防反射膜及光刻胶厚度分析· 真空吸盘保证样品定位一致· 本色三维成像· 台阶高度,线与面粗糙度、角度及尺寸测量Zeta 200特色功能1.多点测量 用户可按其所需设置每片样品上的采样点数——少许几点往往适用于快速检测,多点则可用于详细分析。2.大面积成像 Zeta 200可自动按次序对多个视场进行成像,然后由软件拼接成一张大面积的样品表面三维图像。3.自动形貌特征测量 用户可设置操作配方对样品的各种指定形貌特征如尺寸、间距、高度甚至整片样品的弧度等进行自动测量。标准系统配置显微镜系统光源:高亮度白光LED物镜:5x,10x,20x,50x,100x耦合透镜:0.5x自动载物台:200毫米x200毫米XY驱动范围Z轴:30毫米纵向驱动范围数码相机: 1024x768像素,1/3 英寸CCD计算机控制系统处理器:英特尔®酷睿2 双核(最低2.5GHz)随机存储器3GB硬盘驱动器:320GB显示器:22英寸宽屏液晶显示器(1680x1050像素) Zeta 三维测量软件实时视频成像快速数据采集(每处1分钟)三维表面浏览:倾斜,旋转,缩放,过滤•体积计算二维表面分析:特性尺寸,直径,面积图案间距,标准偏差表面粗糙度区域平均台阶高度轮廓测量台阶高度与粗糙度多横截面分析平均值测量标尺倾斜度与表面波度补偿阵列式采样序列自动数据与图像输出用于生产线SPC
三维实景也称为全景环视或360度全景。它是一种运用数码相机对现有场景进行多角度环视拍摄然后进行后期缝合并加载播放程序来完成的一种三维虚拟展示技术。三维实景在浏览中可以由观赏者对图像进行放大、缩小、移动、多角度观看等操作。经过深入的编程,可实现场景中的热点链接、多场景之间虚拟漫游、雷达方位导航等功能。三维实景技术广泛应用于诸多领域网络虚拟展示。三维实景特点: 1、通过专业相机把现场场景完整、细致地拍摄记录下来,不留死角。再通过播放器将图片一切景致,多角度、全方位展示给访问者,一览无遗。 2、三维实景图像源自对真实场景的摄影捕捉,虽然通过实景制作出虚拟空间,但此虚拟空间完全源自于真实的场景,有别于电脑绘制出的虚拟空间,给访问者更加真实的视觉享受。3、360度环视播放效果,让访问者置身于三维立体空间里,任意穿行、观赏,身临其境,享受虚拟世界带来的奇妙幻境。三维实景应用:1、旅游景点虚拟导游展示。 2、酒店订房网上虚拟展示应用。3、餐饮娱乐休闲业订房订座网上虚拟展示应用。4、旅行社旅游线路的展示应用。5、商业服务业空间展示宣传。6、博物馆、展览馆虚拟展示应用。7、房地产销售、租赁虚拟展示应用。8、汽车销售、租赁虚拟展示应用。9、大学校园、政府、企事业单位等形象展示









 我要推广仪器
我要推广仪器
 下载APP
下载APP


