推荐厂家
暂无
暂无
 留言咨询
留言咨询
留言咨询
留言咨询
留言咨询
留言咨询
 留言咨询
留言咨询
 留言咨询
留言咨询
 留言咨询
留言咨询




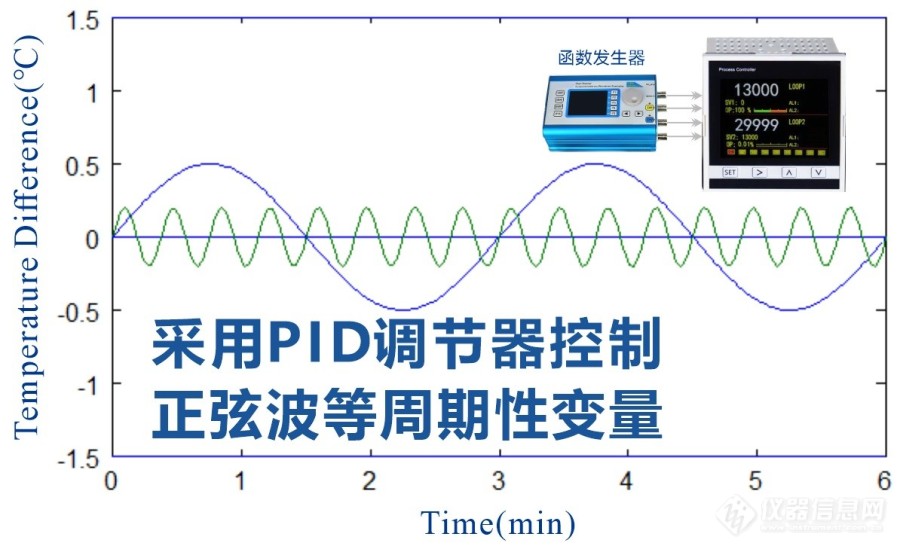
[size=16px][color=#339999]摘要:目前各种PID控制器仪表常用于简单的设定点(Set Point)和斜坡(Ramp)程序控制,但对于复杂的正弦波等周期性变量的控制则无能为力。为了采用标准PID控制器便捷和低成本的实现对正弦波等周期性变量的自动控制,本文介绍相应的解决方案。解决方案的主要内容一是采用具有远程设定点功能的PID控制器,二是采用外置信号发生器,发生器输出的周期信号作为PID控制器周期性改变的设定值,从而实现周期性变量的自动控制。[/color][/size][align=center][size=16px][img=正弦波等周期性变量PID自动控制的解决方案,600,365]https://ng1.17img.cn/bbsfiles/images/2023/03/202303031128526531_6859_3221506_3.jpg!w690x420.jpg[/img][/size][/align][size=18px][color=#339999][b]1. 问题的提出[/b][/color][/size][size=16px] 在各种科研生产中经常会设计一些周期性的温度、湿度、真空压力和振动等交变环境或边界条件来进行各种特定的测试和考核,这些周期性边界条件或环境所呈现出的常见形式往往会是方波、正弦波,三角波和梯形波等,这在各种物理参数的动态测试和产品构件的性能考核试验过程中体现的尤为明显,由此就要求相应的自动化系统能提供这些不同波形环境变量的准确控制,从而保证实际环境的变化与测试及试验数学模型对边界条件的描述尽可能的吻合,最终保证物理变量测试以及考核试验的准确性和可靠性。[/size][size=16px] 在各种温度、湿度、真空压力和振动等环境的形成和自动化控制过程中,基本都是采用各种小巧的工业级PID控制器和PLC可编程逻辑控制器,这些控制器非常适用于定点或变化速度较慢的线性变化控制,图1(a)所示就是这样一个非常典型温度控制变化过程曲线。[/size][align=center][size=16px][color=#339999][b][img=典型被控变量变化曲线,690,213]https://ng1.17img.cn/bbsfiles/images/2023/03/202303031129551376_5834_3221506_3.jpg!w690x213.jpg[/img][/b][/color][/size][/align][align=center][size=16px][color=#339999][b]图1 温度过程典型变化曲线:(a)折线形式;(b)正弦波形式[/b][/color][/size][/align][size=16px] 对于图1(a)所示的典型温度变化过程,采用普通的PID程序控制器进行编程设计就可以实现,并且还可以编辑多条这样的多折线控制程序进行存储和调用运行。但对于如图1(b)所示的正弦波形式的温度控制和线性升温加正弦波调制的温度控制,目前还未看到可进行这种周期性变量控制的标准化PID控制器。为了在实际应用中实现这种周期性变量的PID控制,往往需要采用计算机和PLC并进行复杂的控制程序编写才能实现这种复杂功能,但这具有较高的技术门槛。[/size][size=16px] 为了解决上述PID控制器对于复杂正弦波等周期性变量控制的无能为力,并能采用标准PID控制器便捷和低成本的实现对正弦波等周期性变量的自动控制,本文将提出以下解决方案。[/size][size=18px][color=#339999][b]2. 解决方案[/b][/color][/size][size=16px] PID调节器进行自动控制的基本原理是根据设定值与被控对象测量值之间的控制偏差,将偏差按比例、积分和微分通过线性组合形成控制输出量,对被控对象进行控制。这里的设定值是一种泛指,实际上包括了不随时间变化的固定设定值和随时间变化的设定曲线。[/size][size=16px] 由此可见,对于PID控制器要实现自动控制的必要前提是要已知被控对象的变化要求,并将此要求按照设定值曲线输入给PID控制器。通常的设定曲线如图1(a)所示,它可以通过设定不同的爬升速率构成控制程序曲线。如果采用此方式来进行如图1(b)所示正弦波那样的周期性被控对象,则需要设计很多个小折线才能准确代表波形曲线,而在实际应用中还需能不断调整被动对象的波幅和频率,由此可见采用这种折线方式来对正弦波类周期性变化被动对象进行设定值近似无可操作性。总之,这种问题最终可以归结到如何使得PID控制器的设定值变得符合周期性函数特征,并可以很方便的进行波形、波幅和频率的更改。[/size][size=16px] 为了可以很方便的将PID控制器设定值按照所需的函数波形进行设置,本文提出的解决方案具体内容如下:[/size][size=16px] (1)采用具有外部设定点功能的PID控制器,即PID控制器所接收到的外部任意波形信号都可以作为设定值。[/size][size=16px] (2)外置一个函数信号发生器,给PID控制器传输所需的波形信号。[/size][size=16px] 依据上述方案所确定的PID控制装置及其接线如图2所示。[/size][align=center][size=16px][color=#339999][b][img=正弦波等周期变量PID控制装置及接线图,690,193]https://ng1.17img.cn/bbsfiles/images/2023/03/202303031146347077_9300_3221506_3.jpg!w690x193.jpg[/img][/b][/color][/size][/align][align=center][size=16px][color=#339999][b]图2 正弦波等周期变量PID控制装置及接线图[/b][/color][/size][/align][size=16px][color=#339999][b]2.1 具有远程设定点功能的PID控制器[/b][/color][/size][size=16px] 所用的具有远程设定值功能的PID控制器一般配置有两个输入通道,第一主输入通道作为测量被控对象的传感器输入,第二辅助输入通道用来作为远程设定点输入。与主输入信号一样,辅助输入的远程设定点同样可接受47种类型的输入信号,其中包括10种热电偶温度传感器、9种电阻型温度传感器、3种纯电阻、10种热敏电阻、3种模拟电流和12种模拟电压,即任何信号源只要能转换为上述47种类型型号,都可以直接接入第二辅助输入通道作为远程设定点源。需要注意的是,远程设定点功能只能在单点设定控制模式下有效,在程序控制模式下无此功能。[/size][size=16px][color=#339999][b]2.2 函数信号发生器[/b][/color][/size][size=16px] 对于所有被控对象而言,相应的传感器测量输出无外乎就是电压和电阻这两类信号输出。因此,为了实现被控对象周期性变化的控制,可以采用各种相应的函数信号发生器输出周期性设定值,对于热电偶和热电阻的周期信号输出,可以采用专门的过程校验仪输出相应的温度设定值。[/size][size=16px][color=#339999][b]2.3 接线、参数设置和操作[/b][/color][/size][size=16px] 在如图2所示的周期性变量PID控制系统中,在主输入通道上连接过程传感器,在主控输出通道连接的是执行机构,由此传感器、执行机构和PID调节器组成标准的闭环控制回路,在一般情况下可以通过内部设定点进行PID自动控制。[/size][size=16px] 如果要对被控对象进行周期性变化的控制,则使用远程设定点功能,此时需要在辅助输入通道接入远程设定点源,即函数信号发生器或过程校验仪。[/size][size=16px] 完成外部接线后,在运行使用远程设定值功能之前,需要对PID控制器的辅助输入通道相关参数进行设置,需要满足以下几方面要求:[/size][size=16px] (1) 辅助通道上接入的远程设定点信号类型要与主输入通道完全一致。[/size][size=16px] (2) 辅助通道的显示上下限也要与主输入通道完全一致。[/size][size=16px] (3) 显示辅助通道接入的远程设定点信号大小的小数点位数要与主输入通道保持一致。[/size][size=16px] 完成上述辅助输入通道参数的设置后,开始使用远程设定点功能时,还需要激活远程设定值功能。远程设定值功能的激活可以采用以下两种方式:[/size][size=16px] (1) 内部参数激活方式:在PID控制器中,设置辅助输入通道2的功能为“远程SV”,相应数字为3。[/size][size=16px] (2)外部开关切换激活:如图2所示可连接一个外部开关进行切换来选择远程设定点功能。同时,还需在PID控制器中,设置辅助输入通道2的功能为 “禁止”,相应数字为0。然后设置外部开关量输入功能DI1为“遥控设定”,相应数字为2。通过这种外部开关量输入功能的设置,就可以采用图2中所示的纽子开关实现远程设定点和本地设定点之间的切换,开关闭合时为远程设定点功能,开关断开时为本地设定点功能。[/size][size=16px] 需要注意的是,无论采用哪种远程设定点激活和切换方式,在输入信号类型、显示上下限范围和小数点位数这三个参数选项上,辅助输入通道始终要与主输入通道保持一致。[/size][size=16px][color=#339999][b]3. 总结[/b][/color][/size][size=16px] 综上所述,本文提出的解决方案,可以彻底解决正弦波等周期性变量的PID控制问题,而且使用简便和门槛较低,无需再进行复杂的程序编写。[/size][size=16px] 另外,本解决方案还可以进行多种拓展,如可实现被控对象周期性调制波的加载,非常便于实现更复杂的第二类和第三类边界条件的精密PID控制。[/size][size=16px][/size][align=center]~~~~~~~~~~~~~~~~~~~~[/align][size=16px][/size]
HZD-L/W,HZD-W-B智能振动监控仪ST-3,ST-5振动传感器监控仪为双切换的仪表。与ST系列振动速度传感器配套,可以检测振动位移和振动速度。振动值的大小由前面板的表头显示,同时具有标准的电流输出,可与各种DCS、PLC系统配套。当振动值超限时,本仪表可外接声光报警器以提示现场操作人员采取保护措施,并有报警、危险开关量输出。 实现智能处理:报警Ⅰ值、Ⅱ值可通过面板按键任意设置 面板按键可调整量程值,无需电位器调整,方便现场调试 一分钟不按操作键,可自行回到运行状态 报警延时调整范围0.1~3秒,以防止现场干扰引起误报警.具有上、掉电检测功能,同时切断报警、停机输出回路,能有效抑制仪表误报警 后面板上有与振动幅度值成正比的电流输出端子,供记录输出 振动位移和振动烈度可自由切换 .频率范围:5~300Hz 信号输入:ST系列振动速度传感器 量 程:振动位移0~200μm(P-P) 振动烈度0~20.0mm/s(RMS) 准 确 度:±1%(满量程) 电流输出: 4~20mA 开关量输出:DC 28V / 1A或AC220V/2A(常开) 报警设定:满量程内任意设定 环境温度:运行时:0~65℃ 储存时:-30~80℃ 相对湿度:至95%,不冷凝 电源电压:220VAC/50Hz±10% 50mA 外形尺寸:160×80×250mm 开孔尺寸:152+1×74+1 mm 安装方式:盘装式 挂壁式安装的尺寸: 外形尺寸:245×190×88mm 安装尺寸:170×275mm HZD-L/W,HZD-W-B智能振动监控仪ST-3,ST-5振动传感器量程范围: 振动位移 1:0~100μm 2*:0~200μm 3:0~500μm 振动烈度 1:0~10.0mm/s 2*:0~200mm/s 3:0~500mm/s HZD-W-B型挂壁式振动监测仪,可测量机壳或者结构相对于自由空间的振动,即绝对振动,特别适用于具有滚珠轴承的机器,在这种机器里轴的振动可较多地传到机壳上,故该监测仪可配接磁电式速度传感器,对旋转机械进行连续测量和保护,传感器的安装应特别注意,不会导致传感器振幅减低,以及频率影响被改变或所产生的信号不能代表机器的真实振动,对于电机、压缩机、风机等需要测量大量振动点的情况,该监测仪尤其适用。 HZD-L/W,HZD-W-B智能振动监控仪ST-3,ST-5振动传感器功能说明 1、实现智能处理:报警Ⅰ值、Ⅱ值可通过面板按键任意设置 2、面板按键可调整量程值,无需电位器调整,方便现场调试 3、一分钟不按操作键,可自行回到运行状态 4、报警延时调整范围0.1~3秒,以防止现场干扰引起误报警 5、具有上、掉电检测功能,同时切断报警、停机输出回路,能有效抑制仪表误报警6、后面板上有与振动幅度值成正比的电流输出端子,供记录输出 224481电气指标: 1、外接电源:220VAC 50Hz 0.5A 2、输入 信号:接受一个ST系列磁电式速度传感器的信号 灵敏度:20mV/mm/S±5% 频响:10~300Hz 输入阻抗:100KΩ 3、量程:0~500μm(峰-峰值) 4、显示 显示方式:三位0.5英寸LED数字显示 显示精度:±1 %满量程 光电管LED指示:报警Ⅰ值、报警Ⅱ值红色LED 5、输出 电流输出:4~20mA 有源 输出负载:≤500Ω 6、报警点设置 范围:0~100%满量程 精确度:±0.5% 7、继电器 密封:环氧树脂 节点容量:2A/220VAC或1A/28VDC 节点输出:常开触点 8、RS485通讯接口:用于参数编程组合 波特率:9.6K~38.4Kbps HZD-L/W,HZD-W-B智能振动监控仪ST-3,ST-5振动传感器环境指标: 温度范围 运行时:0℃~+65℃ 储存时:-30℃~+80℃ 相对湿度:至95%,不冷凝 物理指标: 外形尺寸:245×190×88mm 安装尺寸:孔间距为170×272.5mm 重 量:3.5Kg
HZD-L智能振动烈度监控仪功能说明(智能型)1、实现智能处理:报警Ⅰ值、Ⅱ值可通过面板按键任意设置2、面板按键可调整量程值,无需电位器调整,方便现场调试 3、一分钟不按操作键,可自行回到运行状态4、报警延时调整范围0.1~3秒,以防止现场干扰引起误报5、具有上、掉电检测功能,同时切断报警、停机输出回路,能有效抑制仪表误报警6、后面板上有与振动烈度值成正比的电流输出端子,供记录输出HZD-L智能振动烈度监控仪电气指标:1、 外接电源:220VAC 50Hz 0.5A2、 输入信号:接受一个ST系列磁电式速度传感器的信号 灵敏度:20 mV/mm/s±5%频响:10~300Hz输入阻抗:100KΩ3、量程:0~50.0mm/s(真有效值)4、显示显示方式:三位0.5英寸LED数字显示显示精度:±1%满量程光电管LED指示:报警Ⅰ值、报警Ⅱ值红色LED5、输出电流输出:4~20mA 有源输出负载:≤500Ω6、报警点设置范围:0~100%满量程 精确度:±0.5%7、继电器密封:环氧树脂节点容量:2A/220VAC或1A/28VDC节点输出:常开触点8、RS485通讯接口:用于参数编程组合波特率:9.6K~38.4Kbps环境指标:温度范围运行时:0℃~+65℃储存时:-30℃~+80℃相对湿度:至95%,不冷凝物理指标:单/双通道外形尺寸:160×80×250mm 开孔尺寸:152+1×74+1 mm重 量:2KgHZD-L智能振动烈度监控仪订货指南 振动烈度监控仪必须配置 ST 系列振动速度传感器形成系统 1 、普通型 HZD - L - A □ - B □ - C □ - D □ 2 、智能型 HZD - L - B - A □ - B □ - C □ - D □ -E □ 选型说明 量程范围 A □: 1 —— 0 ~ 10.0mm/S ; 2* —— 0 ~ 20.0mm/S ; 3 —— 0 ~ 50.0mm/S 通道选择 B □: 1 ——单通道; 2* ——双通道; 传感器选择 C □: 1 —— ST-2 ; 2* —— ST-3 报警延时 D □: 1 —— 0.1 秒; 2* —— 1 秒; 3 —— 3 秒 通讯接口 E □ : 1 ——有 485 通讯接口; 2* ——无通讯接口










 我要推广仪器
我要推广仪器
 下载APP
下载APP



