推荐厂家
暂无
暂无
 留言咨询
留言咨询
留言咨询
留言咨询
留言咨询
留言咨询
 400-628-5299
留言咨询
400-628-5299
留言咨询
 400-628-5299
留言咨询
400-628-5299
留言咨询
 400-628-5299
留言咨询
400-628-5299
留言咨询





[b][url=http://www.f-lab.cn/vivo-imaging/nexus128.html]三维光声超声成像系统Nexus128[/url][/b]是全球首款成熟商用的[b]3D光声成像系统[/b]和[b]3D光声CT系统[/b]和[b]3D光声断层扫描成像系统[/b],具有更高灵敏度和各向同性分辨率,提高光声图像质量,具有更快的扫描时间和更高光声成像处理能力。三维光声超声成像系统利用内源性或外源性对比产生层析吸收的断层图像,适用于近红外吸收染料或荧光探针进行对比度增强和分子成像应用。三维光声超声成像系统应用分子探针的吸收和分布肿瘤血管-血红蛋白浓度肿瘤缺氧-二氧化硫[img=三维光声超声成像系统]http://www.f-lab.cn/Upload/photo-acoustic-CT-Nexus128.png[/img]三维光声超声成像系统Nexus128特点预定义的肿瘤生物学和探头吸收协议先进灵活的研究模式的扫描参数先进的重建算法易于使用的图形用户界面紧凑,方便的现场系统强大的查看和分析软件易于使用的图形用户界面数据可视化与分析三维光声数据从三维光声超声成像系统传输到工作站进行观察和分析。工作站上的数据具有与三维光声超声成像系统相同的结构/组织。独立的工作站允许调查员分析数据,而另一个操作员正在获取数据。前置像头具有强大的内置工具Endra 可以为特殊定量数据应用提供OsiriX 插件三维光声超声成像系统Nexus128:[url]http://www.f-lab.cn/vivo-imaging/nexus128.html[/url]
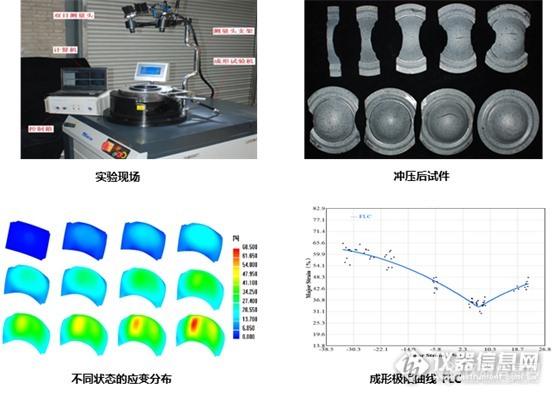
1-1 系统介绍三维光学非接触式应变位移振动综合测量系统分为三维光学应变测量系统和三维动态变形测量系统两个部分。 http://ng1.17img.cn/bbsfiles/images/2016/07/201607051411_599282_3024107_3.png http://ng1.17img.cn/bbsfiles/images/2016/07/201607051411_599283_3024107_3.png 图1 三维应变测量头 图2 动态变形测量头三维光学应变测量系统主要通过数字散斑相关法和双目立体视觉技术结合,追踪物体表面散斑点,实时测量各个变形阶段的散斑图像,通过算法重建三维坐标,最终实现快速、高精度、实时、非接触的三维应变测量。(全场或局部应变)动态变形测量系统基于双目立体视觉技术,采用两个高速摄像机实时采集被测物体变形图像,利用准确识别的标志点(包括编码标志点和非编码标志点)实现立体匹配,重建出物体表面点三维空间坐标,并计算得到物体变形量、三维轨迹姿态等数据。(关键点振动位移)三维光学应变测量系统和动态变形测量系统可以根据实验情况单独使用,也可以合并成综合测量系统使用。1-2与传统方法对比 三维光学测量方法传统测量方法(如位移计、应变片、引伸计等)测量方式非接触式测量,不对被测物体造成干扰与影响。接触式测量,易打滑,不容易固定,试件断裂容易破坏引伸计。测量对象适用于任何材质的对象。测量尺寸范围广,从几毫米到几米。适用于常规尺寸对象测量,特殊材料无法测量,小试样无法测量,大试样需要多贴应变片。测量范围应变测量范围:0.01%~1000%。应变测量范围:应变片通常小于5%,引伸计小于50%。环境要求环境要求低,可在高温、高速、辐射条件下测量。一般适用常规条件测量。测量结果全场多点、多方向测量,同时获得三维坐标、三维位移及应变。单点、单方向测量。三维测量需要多个应变片,效率低。1-3 系统技术参数 指标名称技术指标1. 核心技术工业近景摄影测量、数字图像相关法2. 测量结果三维坐标、全场位移及应变3. 测量幅面支持4mm-4m范围的测量幅面,更多测量幅面可定制4. 测量相机支持百万至千万像素相机,支持低速到高速相机,支持千兆网和Camera Link等多种相机接口5. 相机标定支持任意数目相机的同时标定,支持外部图像标定6. 位移测量精度0.01pixel7. 应变测量范围0.01%-1000%8. 应变测量精度0.005%9. 测量模式兼容二维及三维变形测量10. 实时测量采集图像的同时,实时进行全场应变计算11. 多测头同步测量支持多相机组同步测量,相机数目任意扩展,可同步测量多个区域的变形应变12. 动态变形模块具备圆形标志点动态变形测量功能13. 轨迹姿态测量模块具备刚体物体运动轨迹姿态测量功能14. 试验机接口接通后实时同步采集试验机的力、位移等信号15. FLC接口配合杯突试验机进行Nakazima试验,可以测得材料的FLC成形极限曲线16. 显微应变测量配合双目体式显微镜,可实现微小型物体的三维全场变形应变检测17. 64位软件软件采用64位计算,速度更快18. 系统兼容性支持32位和64位Windows操作系统2 系统应用于汽车振动强度实验室2-1 振动强度实验室介绍振动强度试验室,主要开展对汽车整车,总成,零部件,或者材料的强度,耐久性,疲劳特性,以及可靠性等问题的研究,试验,考核,或者评估。三维应变位移振动综合测量系统在振动强度试验室里具备以下的功能:(1)采集相关的振动、位移和变形数据;(2)作为前期信号分析的软件和硬件;(3)进行必要的试验控制和试验后期数据分析系统。2-2 汽车振动测量常规配合使用设备振动模拟实验系统:电动式振动试验台,机械式试验台,电液伺服试验机系统,道路模拟试验台,吊车(一般5~10吨、小型3吨以下、大型10吨以上)等。振动数据采集传统产品:传感器、应变片、放大器等。2-3系统在汽车振动实验室中应用的相关实验采集测量系统:三维应变位移振动综合测量系统。配合使用系统:振动模拟实验系统。实现功能1—耐振性能试验。测试车辆或者零部件系统的减振,耐振性能。模拟振动环境,通过非接触的光学方法,测量振动和位移,从而对车辆的振动性能进行分析。应用包括:发动机振动模态分析,车门振动实验,座椅振动测量分析等。实现功能2—耐久可靠试验。考核车辆和零部件的强度、抗疲劳特性和可靠性指标。应用包括:车身结构强度实验(测量区域振动或者关键点变形),汽车座椅分级加载实验,汽车轮胎受力变形实验等。3 系统应用于汽车材料实验室3-1 汽车材料实验室介绍汽车材料试验室,主要开展对汽车新型材料及相关基础性工作的研究和探索。三维应变位移振动综合测量系统在材料试验室里一般有以下的基本功能:(1)汽车材料常规力学性能方面的测试,得到各种工况下的应变变形;(2)汽车材料焊接的应变变化情况测量;(3)板料成形应变及板料成形极限曲线测量。3-2 汽车材料试验常规配合使用设备力学实验系统:高温蠕变试验机、扭转试验机、疲劳试验机、杯突试验机等。焊接相关设备:焊枪、焊机等。3-3 系统在汽车材料实验室中应用的相关实验采集测量系统:三维应变位移振动综合测量系统。配合使用系统:力学实验系统、焊接相关设备。实现功能1—材料应变变形测量实验。通过对材料进行常规的拉压弯等实验,进行相关材料的力学性能测定。应用包括:金属材料拉伸实验,复合材料大变形测量,碳纤维材料实验等。实现功能2—汽车焊接相关试验。考核汽车相关焊接实验的应变和变形。应用包括:焊接全场应变测量,高温焊接变形测量等。实现功能3—板料成形相关实验。板料成形过程中的全场应变变形测量和板料成形极限曲线(配合杯突试验机)。应用包括:板料成形应变实验、板料成形极限曲线测定实验。4 系统在汽车工程研究方面典型实验案例展示4-
[b][url=http://www.f-lab.cn/vivo-imaging/lois-3d.html]三维光声层析成像系统[/url][/b]是全球首个[b]体积光声层析成像仪[/b]器,提供[b]三维的组织模拟幻影[/b],包括小动物以及其他在成像模块中的组织图像。三维光声层析成像系统lois-3d是最早根据[b]体积光声层析成像技[/b]术描绘吸收的光能生产综合信息(血液分布及其氧)的系统,提供极其丰富的互补解剖和功能的三维光声图像。[img=三维光声层析成像系统]http://www.f-lab.cn/Upload/LOIS-3D-optoacoustic-tomography.JPG[/img]该三维光声层析成像系统的成像模块被设计成三度扫描,通过研究对象(在临床前研究系统)或模块本身(在临床乳房成像系统)的360度旋转。视频在左边绘制显示成像模块设计的基础激光光声成像系统,lois-3d。它无探针准线快速扫描最佳,而且提供了一个用于小动物活动的灵活的小控制台。三维光声层析成像系统:[url]http://www.f-lab.cn/vivo-imaging/lois-3d.html[/url]










 我要推广仪器
我要推广仪器
 下载APP
下载APP


