推荐厂家
暂无
暂无
 留言咨询
留言咨询
 400-860-5168转4314
留言咨询
留言咨询
400-860-5168转4314
留言咨询
留言咨询
 400-675-6560
留言咨询
400-675-6560
留言咨询
 400-860-5168转4377
留言咨询
400-860-5168转4377
留言咨询
 留言咨询
留言咨询




无线电探空仪 测定自由大气各高度的气象要素,并将气象情报用无线电讯号发送到地面的遥测仪器。由于仪器是在上升(或下降)过程中测量的,空中气象要素随高度有较大的空间变率,要求探空仪感应元件应具有较高的灵敏度、准确度、感应快、量程大,仪器整体体积小、重量轻、牢固可靠,能经受风云雨雪和减少高空强辐射的影响。http://www.kepu.net.cn/gb/earth/weather/observe/images/obs005_pic.jpg中国制探空仪
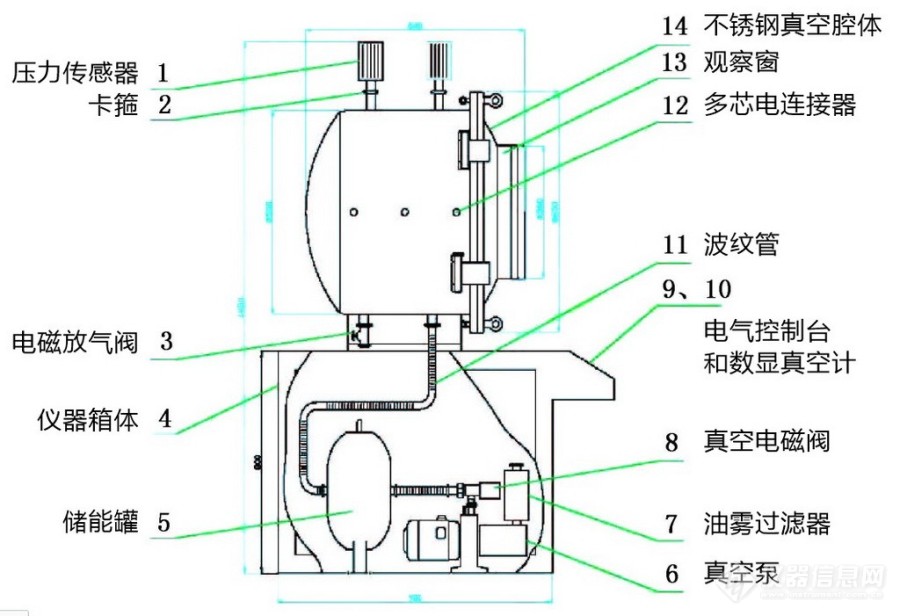
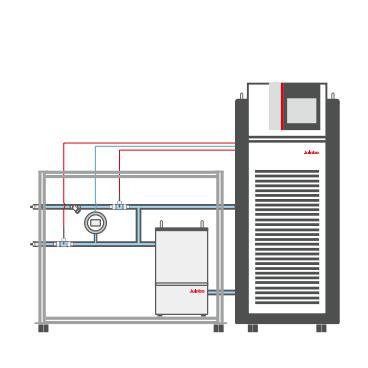
[color=#990000]摘要:针对上一代探空仪检定用低压环境模拟舱压力控制系统控制精度和稳定性差、压力传感器和控制系统配置不合理等问题,用户提出升级改造要求。本文介绍了新一代低压环境模拟舱压力控制系统的实施方案,采用了双向控制模式,进行了方案验证试验,试验结果证明控制精度和稳定性都大幅提高。关键词:低压模拟舱,探空仪,压力控制,电动针阀,电动球阀,上游模式,下游模式,PID控制器[/color][align=center]~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~[/align] [size=18px][color=#990000]一、问题的提出[/color][/size]检定探空仪的重要手段之一是在地面进行低压环境模拟舱的测试,在用的低压环境模拟舱结构如图1所示。[align=center][color=#990000][img=低气压环境模拟舱压力控制,550,376]https://ng1.17img.cn/bbsfiles/images/2022/01/202201061504557090_7216_3384_3.jpg!w690x472.jpg[/img][/color][/align][align=center][color=#990000]图1 低压环境模拟舱结构示意图[/color][/align]此低压环境模拟舱使用过程中存在压力控制波动较大的问题,越靠近1个大气压时波动越大,通过分析认为主要是以下几方面原因引起:(1)压力传感器选择不合理,在全量程压力范围内传感器误差所占比例并不相同,从而显示出靠近1个大气压时波动大和远离1个大气压时波动小的现象,但实际上整体都存在较大波动,只是压力传感器在1个大气压附近精度最高,而在远离1个大气压处压力传感器误差已经完全涵盖了压力波动范围。(2)压力控制采用的是开关控制模式,真空泵和电磁阀根据压力设定值大小同时开启或关闭,尽管增加了储气罐作为缓冲,但这种半自动控制模式很难实现压力的准确恒定。(3)控制器并没有采用PID自动控制方式,也是影响压力控制精度的主要原因。综上分析,针对上一代探空仪检定用低压环境模拟舱压力控制系统控制精度和稳定性差、压力传感器和控制系统配置不合理等问题,用户提出升级改造要求。本文将介绍新一代低压环境模拟舱压力控制系统的实施方案,拟采用双向控制模式,并进行方案验证试验,由此证明控制精度和稳定性能大幅提高。[size=18px][color=#990000]二、压力控制系统升级改造方案[/color][/size]探空仪检定用低压环境模拟舱工作的绝对压力范围为1torr~760torr,要求在此范围内模拟舱的压力可以在任意设定点上准确恒定,甚至要求可以按照设定变压速率进行控制。为此,具体的升级改造方案是在原压力控制系统的基础上,保留真空泵和真空电磁阀,更换压力传感器和控制器,去掉储能罐,增加数控的进气阀和排气阀,具体方案如下:(1)采用10torr和1000torr两个不同量程的电容压力计来覆盖整个低气压范围的测量,从而保证全量程的测量精度。(2)采用高精度PID真空压力控制器,以匹配电容压力计的测量精度和保证控制精度。(3)分别真空腔体的进气口和排气口安装电动针阀和电动球阀,电动针阀直接安装在进气口处,电动球阀安装在排气口和真空泵的电磁阀之间。(4)控制方式分别采用上游模式和下游模式,上游模式用来控制10torr以下气压,下游控制用来控制10~760torr范围气压。(5)如图2所示,上游模式是维持上游压力和出气口流量恒定,通过调节进气口流量控制仓室压力。(6)如图3所示,下游模式是维持上游压力和进气口流量恒定,通过调节排气口流量控制仓室压力。[align=center][color=#990000][img=低气压环境模拟舱压力控制,400,421]https://ng1.17img.cn/bbsfiles/images/2022/01/202201061506055621_2789_3384_3.jpg!w400x421.jpg[/img][/color][/align][align=center][color=#990000]图2 低气压上游控制模式[/color][/align][align=center][color=#990000][img=低气压环境模拟舱压力控制,450,393]https://ng1.17img.cn/bbsfiles/images/2022/01/202201061506206214_771_3384_3.jpg!w450x393.jpg[/img][/color][/align][align=center][color=#990000]图3 低气压下游控制模式[/color][/align][size=18px][color=#990000]三、方案验证试验[/color][/size]针对上述两种控制模式,分别采用1torr和1000torr两只电容压力计、电动针阀、电动球阀和24位高精度压力控制器进行了考核试验,试验用的真空腔体内部空间为400×400×500mm,试验装置如图4和图5所示。[align=center][color=#990000][img=低气压环境模拟舱压力控制,550,369]https://ng1.17img.cn/bbsfiles/images/2022/01/202201061506318858_3696_3384_3.jpg!w690x464.jpg[/img][/color][/align][align=center][color=#990000]图4 低气压上游控制模式考核试验装置[/color][/align][align=center][color=#990000][img=低气压环境模拟舱压力控制,550,339]https://ng1.17img.cn/bbsfiles/images/2022/01/202201061506474377_3818_3384_3.jpg!w690x426.jpg[/img][/color][/align][align=center][color=#990000]图5 低气压下游控制模式考核试验装置[/color][/align]在上游模式试验过程中,首先开启真空泵后使其全速抽气,然后在 68Pa 左右对控制器进行 PID参数自整定。自整定完成后,分别对 12、27、40、53、67、80、93 和 107Pa共8个设定点进行了控制,整个控制过程中的气压变化如图6所示。在下游模式试验过程中,首先开启真空泵后使其全速抽气,并将进气阀调节到微量进气的位置,然后在300torr左右对控制器进行PID参数自整定。自整定完成后,分别对 70、 200、 300、450 和 600Torr 共5个设定点进行了控制,整个控制过程中的气压变化如图7所示。 [align=center][color=#990000][img=低气压环境模拟舱压力控制,550,333]https://ng1.17img.cn/bbsfiles/images/2022/01/202201061507110485_1025_3384_3.jpg!w690x418.jpg[/img][/color][/align][align=center][color=#990000]图6 上游模式低气压定点控制考核试验曲线[/color][/align][align=center][color=#990000][img=低气压环境模拟舱压力控制,550,327]https://ng1.17img.cn/bbsfiles/images/2022/01/202201061507246957_2391_3384_3.jpg!w690x411.jpg[/img][/color][/align][align=center][color=#990000]图7 下游模式低气压定点控制考核试验曲线[/color][/align]将上述不同低气压恒定点处的控制效果以波动率来表示,则得到图8和图9所示的整个范围内的波动率分布。从波动率分布图可以看出,在整个低气压的全量程范围内,波动率可以精确控制在±1%范围,在12Pa处出现的较大波动,是因为采用 68Pa处自整定获得的PID参数并不合理,需进行单独的PID参数自整定。 [align=center][color=#990000][img=低气压环境模拟舱压力控制,550,309]https://ng1.17img.cn/bbsfiles/images/2022/01/202201061507435250_4590_3384_3.jpg!w690x388.jpg[/img][/color][/align][align=center][color=#990000]图8 上游模式低气压定点控制考核试验曲线[/color][/align][align=center][color=#990000][img=低气压环境模拟舱压力控制,550,340]https://ng1.17img.cn/bbsfiles/images/2022/01/202201061507565906_1701_3384_3.jpg!w690x427.jpg[/img][/color][/align][align=center][color=#990000]图9 下游模式低气压定点控制考核试验曲线[/color][/align]从上述考核试验结果可以看出,升级改造后的控制方法可以将压力控制精度和稳定性提高五倍以上,并大幅提高了低压环境模拟仓自动化水平和可靠性。[align=center]=======================================================================[/align]
气象火箭探测 用火箭携带仪器对中高层大气进行探测。探测高度主要在30公里以上,80公里以下自由气球所达不到的高度。探测项目包括温度、密度、气压、风向和风速等气象要素,以及大气成份和太阳紫外辐射等。当火箭达到顶端时,抛射出探空仪, 利用丝绸或尼龙制成的降落伞使仪器阻尼下落,可探测20─70公里高度的气象要素,如果火箭上升到顶端,放出金属化尼龙充气气球或尼龙条带或其它轻质材料,用精密雷达跟踪,可探测30─100公里上空风、密度,再推算出温度、气压等气象要素。此外,还有用取样火箭测定大气成份和臭氧含量等,以及用火箭来研究电离层、太阳紫外辐射等。 由于火箭飞行的高度,一般可达100公里以上,因此延伸了无线电探空仪的探测高度。气象火箭的探测资料可供研究中层大气以及宇航和导弹发射等方面使用。虽然利用气象火箭探测大气的工作从第二次世界大战末期才开始,但到1968年已发展成了全球性的火箭探测协作网,其中许多测站都定期发射火箭,交换探测资料,对比探测仪器。 气象火箭一般可分箭锥(箭头)、设备舱和尾段3部分。箭锥内部安装探测仪器,设备舱内安装阻尼降落伞和电路抛射系统,尾段安装有火箭发动机和燃料舱,火箭后部还装有尾翼,用以稳定火箭的姿态。










 我要推广仪器
我要推广仪器
 下载APP
下载APP


