推荐厂家
暂无
暂无
 银牌9年
银牌9年
 400-860-5168转2464
400-860-5168转2464
 留言咨询
留言咨询
留言咨询
留言咨询
留言咨询
留言咨询
 400-860-5168转1421
留言咨询
400-860-5168转1421
留言咨询
 400-860-5168转3036
留言咨询
400-860-5168转3036
留言咨询
 400-860-5168转3614
留言咨询
400-860-5168转3614
留言咨询




[b][color=#339999][font='微软雅黑',sans-serif]摘要:针对红外目标模拟器的高精度可编程温度控制功能,本文介绍了实现高精度温控的温控装置,给出了温控方案。温控装置主要包括[/font]TEC[font='微软雅黑',sans-serif]半导体制冷加热模组、电源自动换向器、传感器和超高精度[/font]PID[font='微软雅黑',sans-serif]控制器。从超高精度温度控制,关键是[/font]PID[font='微软雅黑',sans-serif]控制器具有[/font]24[font='微软雅黑',sans-serif]位[/font]AD[font='微软雅黑',sans-serif]、[/font]16[font='微软雅黑',sans-serif]位[/font]DA[font='微软雅黑',sans-serif]和[/font]0.01%[font='微软雅黑',sans-serif]最小输出百分比的高性能指标,同时还具有可手动和通讯软件编程功能。[/font][/color][/b][align=center][img=常温黑体中TEC半导体可编程高精度温度控制解决方案,600,337]https://ng1.17img.cn/bbsfiles/images/2023/02/202302220435170646_2129_3221506_3.jpg!w690x388.jpg[/img][/align][align=center][color=#339999]~~~~~~~~~~~~~~~[/color][/align][b][size=18px][color=#339999]1. [font='微软雅黑',sans-serif]红外目标模拟器工作原理[/font][/color][/size][/b][font='微软雅黑',sans-serif] 红外目标模拟器([/font]Infrared Target Simulator[font='微软雅黑',sans-serif])广泛应用于红外探测器和红外热像仪整机的工艺测试和评价测试,它为被测装置提供标准的红外测试图像,用于测试关键指标,如[/font]NETD[font='微软雅黑',sans-serif](噪声等效温差)、[/font]MRTD[font='微软雅黑',sans-serif](最小可分辨温差)、[/font]MDRD[font='微软雅黑',sans-serif](最小可探测温差)、[/font]SiTF[font='微软雅黑',sans-serif](信号传递函数)等,以及整个系统的性能评估。[/font][font='微软雅黑',sans-serif][font=微软雅黑, sans-serif] [/font]红外目标模拟器的重要指标包括发射率、辐射均匀性、温度控制精度、温度稳定性和响应速度等,其中前两个指标取决于所用黑体的结构、辐射面材质和黑漆喷涂技术,其余指标则取决于温控系统的性能。红外目标模拟器一般通过单黑体或双黑体实现,但无论采用哪一种黑体结构,高精度的温控技术都是其中的技术关键,它直接关系到红外目标模拟器的性能,是实现红外系统指标测试的关键因素。红外目标模拟器的工作原理如图[/font]1[font='微软雅黑',sans-serif]所示。[/font][align=center][size=14px][b][color=#339999][img=红外目标模拟器原理示意图,500,365]https://ng1.17img.cn/bbsfiles/images/2023/02/202302220437236876_9226_3221506_3.jpg!w690x505.jpg[/img][/color][/b][/size][/align][font='微软雅黑',sans-serif][color=#339999][/color][/font][align=center][b][font='微软雅黑',sans-serif]图[/font][font=&]1 [/font][font='微软雅黑',sans-serif]红外目标模拟器工作原理示意图[/font][/b][/align][font='微软雅黑',sans-serif][font=微软雅黑, sans-serif] [/font]如图[/font]1[font='微软雅黑',sans-serif]所示,目标位于准直器反射器焦平面上。热辐射图样将由热辐射表面和目标之间的温差产生,并由准直器转换成平行光以模拟无限远的红外目标,供被测红外系统的成像探测器使用。[/font][font='微软雅黑',sans-serif][font=微软雅黑, sans-serif] [/font]温控系统由温度传感器、[/font]TEC[font='微软雅黑',sans-serif]半导体模组、散热器、风扇、[/font]PID [font='微软雅黑',sans-serif]控制器、自动电源换向器等组成。温度传感器[/font]A[font='微软雅黑',sans-serif]检测的是目标温度,温度传感器[/font]B[font='微软雅黑',sans-serif]检测的是辐射表面温度。根据目标的设定温度,控制器通过[/font]PID[font='微软雅黑',sans-serif]控制算法计算加热或制冷的控制量并驱动电源换向器工作电流的方向和大小,使得[/font]TEC[font='微软雅黑',sans-serif]半导体模组进行加热或制冷输出。[/font][b][size=18px][color=#339999]2. TEC[font='微软雅黑',sans-serif]半导体高精度温度控制标准装置[/font][/color][/size][/b][font='微软雅黑',sans-serif][font=微软雅黑, sans-serif] [/font]根据红外测试设备的检测指标,要求红外目标模拟器的工作温度范围为[/font]0~50[font='微软雅黑',sans-serif]℃,温度分辨率为[/font]0.001[font='微软雅黑',sans-serif]℃,控温精度为[/font]0.03[font='微软雅黑',sans-serif]℃。要实现此技术指标,温度控制系统需包括加热装置、温度传感器、执行器和[/font]PID[font='微软雅黑',sans-serif]控制器这几部分内容,而且需要满足相应的技术指标。为此,专门针对温控系统本文设计了相应的解决方案,具体结构如图[/font]2[font='微软雅黑',sans-serif]所示。以下为图[/font]2[font='微软雅黑',sans-serif]所示温控方案的详细描述:[/font][align=center][size=14px][b][color=#339999][img=温度控制系统方案示意图,550,559]https://ng1.17img.cn/bbsfiles/images/2023/02/202302220437516841_6377_3221506_3.jpg!w690x702.jpg[/img][/color][/b][/size][/align][font='微软雅黑',sans-serif][color=#339999][/color][/font][align=center][b][font='微软雅黑',sans-serif]图[/font][font=&]2 [/font][font='微软雅黑',sans-serif]红外目标模拟器温度控制系统方案示意图[/font][/b][/align][font='微软雅黑',sans-serif][font=微软雅黑, sans-serif] [/font]([/font]1[font='微软雅黑',sans-serif])加热方式:有很多种加热方式可供选择,如电加热、循环水加热和[/font]TEC[font='微软雅黑',sans-serif]半导体制冷加热等,但考虑到红外目标模拟器对工作温度范围和超高精度温度控制的要求,目前也只有[/font]TEC[font='微软雅黑',sans-serif]热电半导体制冷加热方式比较适用。[/font]TEC[font='微软雅黑',sans-serif]用于红外目标模拟器的温度控制除能满足温度范围之外,与其他加热方式相比具有更高的控温精度、更快的冷热变化控制速度、结构简单以及造价低的突出特点。[/font][font='微软雅黑',sans-serif][font=微软雅黑, sans-serif] [/font]([/font]2[font='微软雅黑',sans-serif])执行机构:为了实现[/font]TEC[font='微软雅黑',sans-serif]的加热制冷功能,除了需要对[/font]TEC[font='微软雅黑',sans-serif]模组的加载电流进行自动调节之外,还需在调节过程中能自动改变电流方向,为此,[/font]TEC[font='微软雅黑',sans-serif]执行机构配备了电源自动换向器。换向器接收加热和制冷控制信号,并根据控制信号大小和方向输出相应的工作电流。[/font][font='微软雅黑',sans-serif][font=微软雅黑, sans-serif] [/font]([/font]3[font='微软雅黑',sans-serif])温度传感器:温度传感器是决定温度控制精度的关键因素之一,因此本方案中配置了高等级的铂电阻温度计(如标准铂电阻温度计)或高等级热敏电阻温度传感器,使得温度传感器的温度分辨率能达到[/font]0.001[font='微软雅黑',sans-serif]℃以及测温精度能达到[/font]0.01~0.02[font='微软雅黑',sans-serif]℃。[/font][font='微软雅黑',sans-serif][font=微软雅黑, sans-serif] [/font]([/font]4[font='微软雅黑',sans-serif])超高精度[/font]PID[font='微软雅黑',sans-serif]控制器:决定温度控制精度的另一个关键因素是温度控制器的数据采集精度、控制算法和控制输出精度。为此,在本解决方案中采用了目前控制精度最高的[/font]VPC2021-1[font='微软雅黑',sans-serif]系列的工业用[/font]PID[font='微软雅黑',sans-serif]程序调节器,除具有不超过[/font]96mm[font='微软雅黑',sans-serif]×[/font]96mm[font='微软雅黑',sans-serif]×[/font]87mm[font='微软雅黑',sans-serif]的小巧尺寸外,关键是此[/font]PID[font='微软雅黑',sans-serif]调节器的模数转换[/font]AD[font='微软雅黑',sans-serif]为[/font]24[font='微软雅黑',sans-serif]位、数模转换[/font]DA[font='微软雅黑',sans-serif]为[/font]16[font='微软雅黑',sans-serif]位、双精度浮点运行运算以及[/font]0.01%[font='微软雅黑',sans-serif]的最小输出百分比,并可对控制程序进行编辑设计,适合红外目标模拟器在全温度量程内多个设定点的自动温度恒定控制。同时,此调节器采用了高级无超调[/font]PID[font='微软雅黑',sans-serif]控制模式,并具有[/font]PID[font='微软雅黑',sans-serif]参数自整定功能,结合超高精度的数据采集和控制输出,可实现十分精细的温度变化调节和控制。另外,此调节器附带功能强大的计算机软件,通过计算机运行此软件可快速进行[/font]PID[font='微软雅黑',sans-serif]控制器的远程设置和运行操作,同时能图形化的显示和记录所有设置参数、控制程序曲线和温度控制变化曲线。[/font][font='微软雅黑',sans-serif][font=微软雅黑, sans-serif] [/font]总之,本文所述的采用[/font]TEC[font='微软雅黑',sans-serif]模组进行的温度控制系统,已经成为超高精度可编程温度控制的一种标准和通用性方案,完全适用于红外目标模拟器的高精度温度控制。[/font][align=center][color=#339999]~~~~~~~~~~~~~~~[/color][/align]
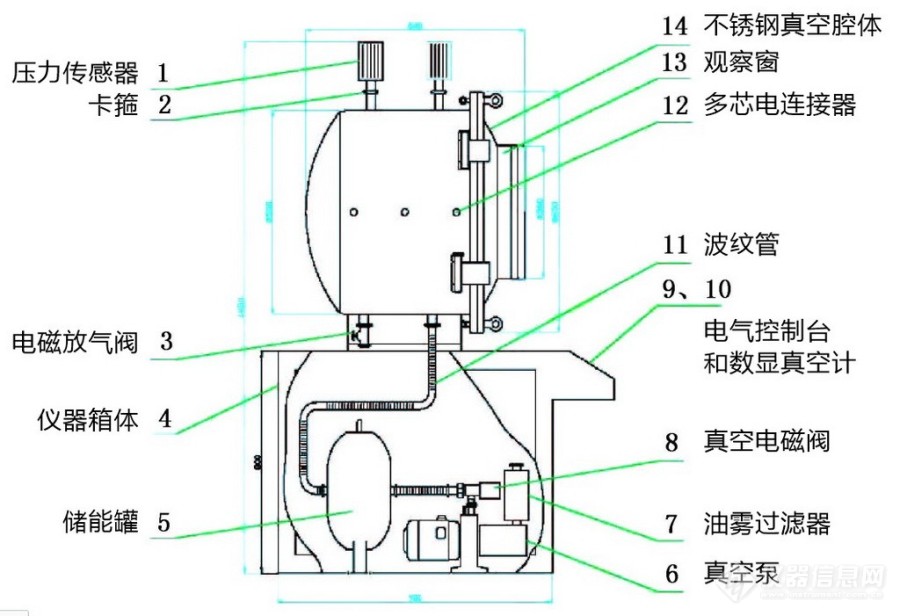
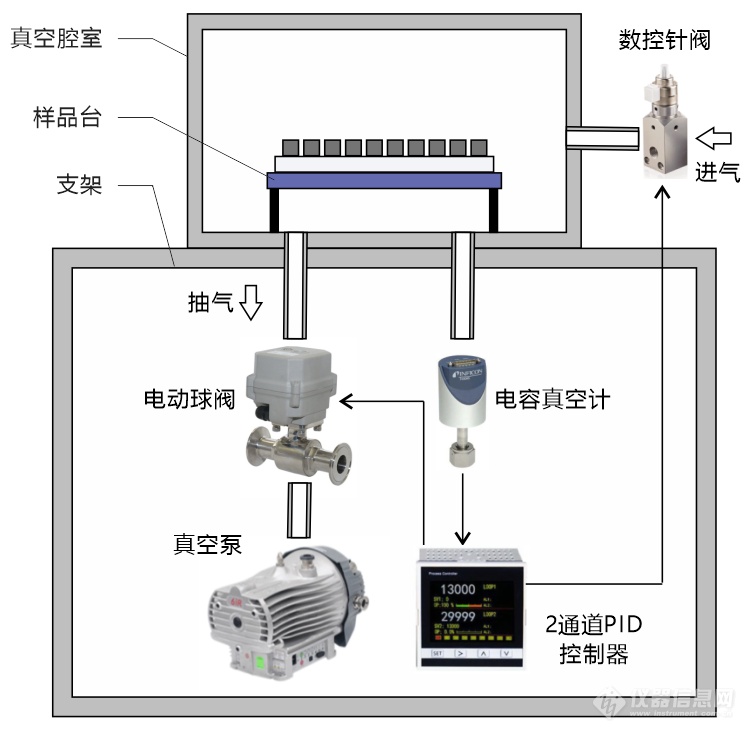
[color=#990000]摘要:针对上一代探空仪检定用低压环境模拟舱压力控制系统控制精度和稳定性差、压力传感器和控制系统配置不合理等问题,用户提出升级改造要求。本文介绍了新一代低压环境模拟舱压力控制系统的实施方案,采用了双向控制模式,进行了方案验证试验,试验结果证明控制精度和稳定性都大幅提高。关键词:低压模拟舱,探空仪,压力控制,电动针阀,电动球阀,上游模式,下游模式,PID控制器[/color][align=center]~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~[/align] [size=18px][color=#990000]一、问题的提出[/color][/size]检定探空仪的重要手段之一是在地面进行低压环境模拟舱的测试,在用的低压环境模拟舱结构如图1所示。[align=center][color=#990000][img=低气压环境模拟舱压力控制,550,376]https://ng1.17img.cn/bbsfiles/images/2022/01/202201061504557090_7216_3384_3.jpg!w690x472.jpg[/img][/color][/align][align=center][color=#990000]图1 低压环境模拟舱结构示意图[/color][/align]此低压环境模拟舱使用过程中存在压力控制波动较大的问题,越靠近1个大气压时波动越大,通过分析认为主要是以下几方面原因引起:(1)压力传感器选择不合理,在全量程压力范围内传感器误差所占比例并不相同,从而显示出靠近1个大气压时波动大和远离1个大气压时波动小的现象,但实际上整体都存在较大波动,只是压力传感器在1个大气压附近精度最高,而在远离1个大气压处压力传感器误差已经完全涵盖了压力波动范围。(2)压力控制采用的是开关控制模式,真空泵和电磁阀根据压力设定值大小同时开启或关闭,尽管增加了储气罐作为缓冲,但这种半自动控制模式很难实现压力的准确恒定。(3)控制器并没有采用PID自动控制方式,也是影响压力控制精度的主要原因。综上分析,针对上一代探空仪检定用低压环境模拟舱压力控制系统控制精度和稳定性差、压力传感器和控制系统配置不合理等问题,用户提出升级改造要求。本文将介绍新一代低压环境模拟舱压力控制系统的实施方案,拟采用双向控制模式,并进行方案验证试验,由此证明控制精度和稳定性能大幅提高。[size=18px][color=#990000]二、压力控制系统升级改造方案[/color][/size]探空仪检定用低压环境模拟舱工作的绝对压力范围为1torr~760torr,要求在此范围内模拟舱的压力可以在任意设定点上准确恒定,甚至要求可以按照设定变压速率进行控制。为此,具体的升级改造方案是在原压力控制系统的基础上,保留真空泵和真空电磁阀,更换压力传感器和控制器,去掉储能罐,增加数控的进气阀和排气阀,具体方案如下:(1)采用10torr和1000torr两个不同量程的电容压力计来覆盖整个低气压范围的测量,从而保证全量程的测量精度。(2)采用高精度PID真空压力控制器,以匹配电容压力计的测量精度和保证控制精度。(3)分别真空腔体的进气口和排气口安装电动针阀和电动球阀,电动针阀直接安装在进气口处,电动球阀安装在排气口和真空泵的电磁阀之间。(4)控制方式分别采用上游模式和下游模式,上游模式用来控制10torr以下气压,下游控制用来控制10~760torr范围气压。(5)如图2所示,上游模式是维持上游压力和出气口流量恒定,通过调节进气口流量控制仓室压力。(6)如图3所示,下游模式是维持上游压力和进气口流量恒定,通过调节排气口流量控制仓室压力。[align=center][color=#990000][img=低气压环境模拟舱压力控制,400,421]https://ng1.17img.cn/bbsfiles/images/2022/01/202201061506055621_2789_3384_3.jpg!w400x421.jpg[/img][/color][/align][align=center][color=#990000]图2 低气压上游控制模式[/color][/align][align=center][color=#990000][img=低气压环境模拟舱压力控制,450,393]https://ng1.17img.cn/bbsfiles/images/2022/01/202201061506206214_771_3384_3.jpg!w450x393.jpg[/img][/color][/align][align=center][color=#990000]图3 低气压下游控制模式[/color][/align][size=18px][color=#990000]三、方案验证试验[/color][/size]针对上述两种控制模式,分别采用1torr和1000torr两只电容压力计、电动针阀、电动球阀和24位高精度压力控制器进行了考核试验,试验用的真空腔体内部空间为400×400×500mm,试验装置如图4和图5所示。[align=center][color=#990000][img=低气压环境模拟舱压力控制,550,369]https://ng1.17img.cn/bbsfiles/images/2022/01/202201061506318858_3696_3384_3.jpg!w690x464.jpg[/img][/color][/align][align=center][color=#990000]图4 低气压上游控制模式考核试验装置[/color][/align][align=center][color=#990000][img=低气压环境模拟舱压力控制,550,339]https://ng1.17img.cn/bbsfiles/images/2022/01/202201061506474377_3818_3384_3.jpg!w690x426.jpg[/img][/color][/align][align=center][color=#990000]图5 低气压下游控制模式考核试验装置[/color][/align]在上游模式试验过程中,首先开启真空泵后使其全速抽气,然后在 68Pa 左右对控制器进行 PID参数自整定。自整定完成后,分别对 12、27、40、53、67、80、93 和 107Pa共8个设定点进行了控制,整个控制过程中的气压变化如图6所示。在下游模式试验过程中,首先开启真空泵后使其全速抽气,并将进气阀调节到微量进气的位置,然后在300torr左右对控制器进行PID参数自整定。自整定完成后,分别对 70、 200、 300、450 和 600Torr 共5个设定点进行了控制,整个控制过程中的气压变化如图7所示。 [align=center][color=#990000][img=低气压环境模拟舱压力控制,550,333]https://ng1.17img.cn/bbsfiles/images/2022/01/202201061507110485_1025_3384_3.jpg!w690x418.jpg[/img][/color][/align][align=center][color=#990000]图6 上游模式低气压定点控制考核试验曲线[/color][/align][align=center][color=#990000][img=低气压环境模拟舱压力控制,550,327]https://ng1.17img.cn/bbsfiles/images/2022/01/202201061507246957_2391_3384_3.jpg!w690x411.jpg[/img][/color][/align][align=center][color=#990000]图7 下游模式低气压定点控制考核试验曲线[/color][/align]将上述不同低气压恒定点处的控制效果以波动率来表示,则得到图8和图9所示的整个范围内的波动率分布。从波动率分布图可以看出,在整个低气压的全量程范围内,波动率可以精确控制在±1%范围,在12Pa处出现的较大波动,是因为采用 68Pa处自整定获得的PID参数并不合理,需进行单独的PID参数自整定。 [align=center][color=#990000][img=低气压环境模拟舱压力控制,550,309]https://ng1.17img.cn/bbsfiles/images/2022/01/202201061507435250_4590_3384_3.jpg!w690x388.jpg[/img][/color][/align][align=center][color=#990000]图8 上游模式低气压定点控制考核试验曲线[/color][/align][align=center][color=#990000][img=低气压环境模拟舱压力控制,550,340]https://ng1.17img.cn/bbsfiles/images/2022/01/202201061507565906_1701_3384_3.jpg!w690x427.jpg[/img][/color][/align][align=center][color=#990000]图9 下游模式低气压定点控制考核试验曲线[/color][/align]从上述考核试验结果可以看出,升级改造后的控制方法可以将压力控制精度和稳定性提高五倍以上,并大幅提高了低压环境模拟仓自动化水平和可靠性。[align=center]=======================================================================[/align]
[size=14px][color=#ff0000]摘要:在探月工程中需要在月面真空环境下采集月壤样品,需要建立地面试验装置来模拟月面的真空热环境,以测试采样器在真空热环境下的性能,由此要求真空度能实现精密控制。本文针对真空热环境地面模拟试验装置,提出了真空度精密控制的技术方案,真空度控制范围为0.1Pa~0.1MPa,全量程的控制精度为±1%。[/color][/size][size=14px][color=#ff0000][/color][/size][align=center][size=14px][color=#330033]~~~~~~~~~~~~~~~~~~~~~~~[/color][/size][/align][size=18px][color=#330033]一、问题的提出[/color][/size]在探月工程中需要在月面真空环境下采集月壤样品,由此需要建立地面试验装置来模拟月面的真空热环境,以测试采样器在真空热环境下的性能,并要求真空度能实现精密控制。由于月壤的特殊性,目前的月壤地面模式试验装置中的真空度控制还需要解决以下几方面的问题:[size=14px](1)月壤和模拟月壤样品,一般为粉末状颗粒,因此在开始阶段的抽气速率要进行严格控制以避免产生扬尘。[/size](2)目前的真空度测量和控制还采用皮拉尼真空计,使得配套的控制系统无法实现真空度的精密控制,造成试验结果的重复性很差。[size=14px](3)月壤地面模拟试验装置普遍体积较小,在宽泛的真空度范围内,实现精确控制一直存在较大难度,真空度的波动性较大,也是造成试验结果重复性差的原因之一。[/size][size=14px]针对月壤地面模式试验装置中存在的上述问题,本文提出了相应的技术方案,并介绍了详细的实施过程。[/size][size=18px][color=#330033]二、技术方案[/color][/size][size=14px]月壤环境地面模拟试验设备真空度密控制系统的整体结构如图1所示,整个系统主要包括真空计、数控针阀、电动球阀、PID控制器和真空泵。为了进行真空度全量程的精密控制,一般需要配备三只电容真空计,真空计的测量精度为0.25%。为配合电容真空计的测量精度,控制器采用了24位A/D和16位D/A的高精度PID控制器,独立的双通道便于进行上游数控针阀和下游电动球阀的气体流量调节和控制。[/size][align=center][size=14px][img=真空度控制好,500,489]https://ng1.17img.cn/bbsfiles/images/2022/04/202204191021365551_7090_3384_3.png!w690x676.jpg[/img][/size][/align][size=14px][/size][align=center]图1 真空度精密控制系统结构示意图[/align][size=14px]真空度的精密控制使用了动态控制模式,即在低真空条件下调节电动球阀,在高真空条件下调节数控针阀,这是一种典型的正反向控制方法,可有效保证真空度的控制精度。[/size]总之,通过此经过验证的真空度控制方案,可实现全量程范围内真空度的控制精度优于1%。[size=14px][/size][align=center]~~~~~~~~~~~~~~~~~~~~~~[/align][size=14px][/size][size=14px][/size][size=14px][/size]










 我要推广仪器
我要推广仪器
 下载APP
下载APP


