推荐厂家
暂无
暂无
 留言咨询
留言咨询
留言咨询
留言咨询
留言咨询
留言咨询

 400-628-5299
留言咨询
400-628-5299
留言咨询
 留言咨询
留言咨询
 400-860-5168转4727
留言咨询
400-860-5168转4727
留言咨询
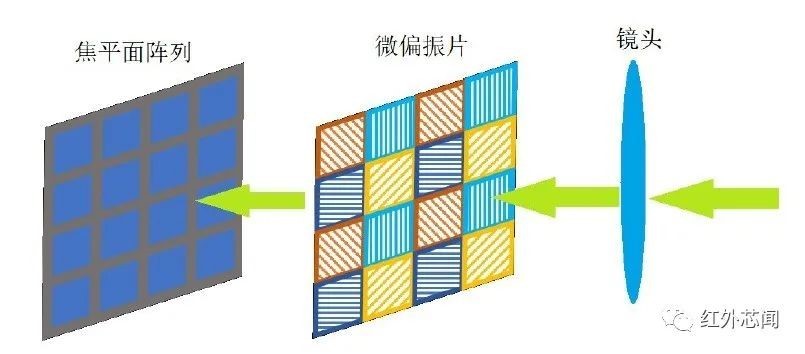





超声波并不是测量机器人与物体间距离的唯一方法,也可以利用红外线。和超声波测量不同,红外线距离传感器不会去探测线光束的传播时间。因为对于我们感兴趣的距离,传输时间为10—15—10-12秒数量级。只有那些极为昂贵的电路才能应付这样的速度。红外线系统采用所谓视差技术。即测量已知光源和它的反射光束之间的反射角。它的工作方式是:红外线光束照射在一个场景上。光束经过传感器前的物体反射后。再照射到传感器。物体越接近,由于视差引起的角度变化就越大。反射光束照在一个非常小的线性光检测器矩阵上。光检测器矩阵连接分析物体距离的电路。这个电路可以提供数字或模拟输出。
激光测量距离是怎样实现的?
[color=#444444]最近想用德国haake RS600流变仪的 椎板系统测量系统 ,通过改变椎板间隙距离、 探索一下不同受限流体的流变性, 但是流变仪计算时所用的参数是按照固定间隙(52微米间隙)设置计算的,现在的问题是 虽然可以改变间隙尺寸 , 但得到的数据明显不对啊 请教各位: 怎么对获得的数据进行校准 有没有其他仪器可以做我想要的实验?[/color]









 我要推广仪器
我要推广仪器
 下载APP
下载APP



