方案摘要
方案下载| 应用领域 | 其他 |
| 检测样本 | 其他 |
| 检测项目 | |
| 参考标准 | 暂无 |
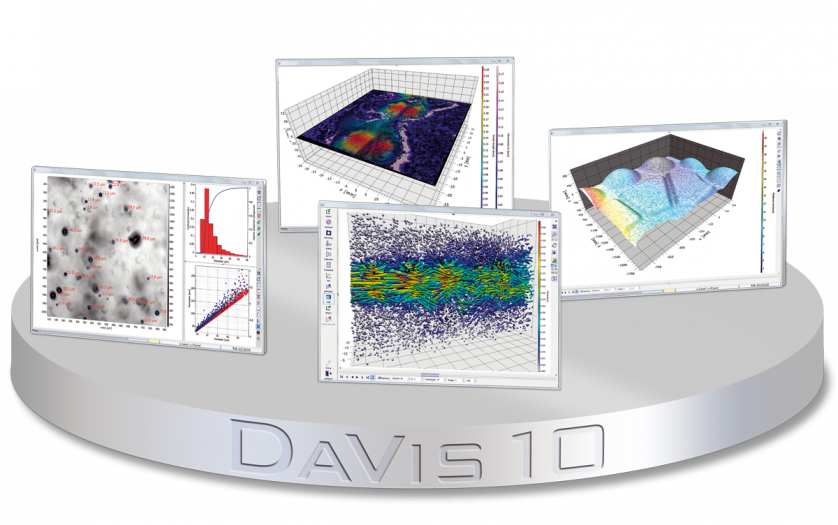
这是立体PIV测量中标定方法的一种图突破和创新。标定过程不再需要进行危险,费时,低效的将片状光源和标定板严格对准的过程。大大提高了标定效率和精度,并且能够拓展立体PIV测量的适用范围。像封闭环境,微小对象,标定板无法放置于内部的场合,也可以进行测量了。

A stereo-PIV (stereo particle image velocimetry)
calibration procedure has been developed based on
fitting a camera pinhole model to the two cameras using
single or multiple views of a 3D calibration plate. A
disparity vector map is computed on the real particle
images by cross-correlation of the images from cameras 1
and 2 to determine if the calibration plate coincides with
the light sheet. From the disparity vectors, the true position
of the light sheet in space is fitted and the mapping
functions are corrected accordingly. It is shown that it is
possible to derive accurate mapping functions, even if the
calibration plate is quite far away from the light sheet,
making the calibration procedure much easier. A modified
3-media camera pinhole model has been implemented
to account for index-of-refraction changes along
the optical path. It is then possible to calibrate outside
closed flow cells and self-calibrate onto the recordings.
This method allows stereo-PIV measurements to be taken
inside closed measurement volumes, which was not
previously possible. From the computed correlation
maps, the position and thickness of the two laser light
sheets can be derived to determine the thickness, degree
of overlap and the flatness of the two sheets.
文献贡献者



在一个双稳湍流涡旋火焰中,对间歇性动态的时间-频率定位
Particle-laden Taylor-Couette流:高阶转变和径向局部波浪涡旋的证据
7根杆束的流体-结构相互作用:用实验数据对比数值模拟
相关产品
汽车光学检测系统AIS
PT403型波长可调谐皮秒激光器
ANL系列高能量高重复频率DPSS纳秒激光器
APL4206 系列高能量皮秒激光放大器
UltraFlux FF/FT 5000 高能量可调谐飞秒激光器系统
UltraFlux FT300型波长可调谐飞秒激光器系统
Ekspla 超高功率激光器系统SYLOS 2A
LaVision PTUx 可编程时间控制单元
LaVision 用于粒子成像测速PIV的相机
LaVision StrainMaser 全场应变测试系统组件
LaVision 用于数字图像相关DIC的相机
LaVision StrainMaster 数字图像相关分析软件包
LaVision 标定板
LaVision StrainMaster 形变应变成像测量系统
LaVision StrainMaster DVC 体视全场应变测量系统

关注

拨打电话

留言咨询