推荐厂家
暂无
暂无
 留言咨询
留言咨询
留言咨询
留言咨询
留言咨询
留言咨询
 留言咨询
留言咨询
 留言咨询
留言咨询
 留言咨询
留言咨询

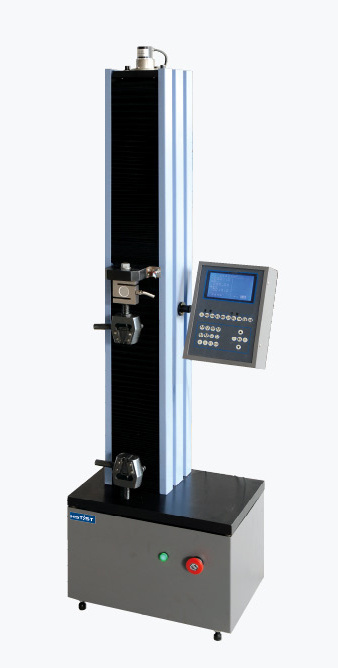



‘土方法’验证YG026H型纺织品电子式织物强力机‘传感器’电子式织物强力机为精密机电一体化产品。主要包括工业级微电脑控制系统,负荷传感器,伸长检测系统,电机输出控制系统,同步带及丝杆传动系统,上下夹持器等http://ng1.17img.cn/bbsfiles/images/2014/12/201412261149_529175_2154459_3.jpg1.目的:验证YG026H型纺织品电子式织物强力机‘传感器’2.检验标准GB/T3923.1-2013《织物拉伸性能,断裂强力的测定,条样法》3.技术参数3.1型式:等速伸长形3.2负荷传感器精度:万分之二3.3力值测量准确度:±1%3.4传感器选择:300KG3.5力值显示单位:N,KG3.6夹持距离设置:10mm~500mm3.7夹持器有效宽度80mm4.标定4.1取出已经计量检定后的砝码,在砝码的上方系一个可以忽略重量的绳子,打结http://ng1.17img.cn/bbsfiles/images/2014/12/201412261152_529177_2154459_3.jpg打开电源,开机http://ng1.17img.cn/bbsfiles/images/2014/12/201412261153_529180_2154459_3.jpg在测量画面下按‘标定’键进入标定画面,用‘移位’键移位可http://ng1.17img.cn/bbsfiles/images/2014/12/201412261154_529183_2154459_3.jpghttp://ng1.17img.cn/bbsfiles/images/2014/12/201412261154_529184_2154459_3.jpg4.1.1 对传感器进行标定:开机后就进入菜单,此时进行’标定‘就为’空标定’,实际值为‘0’;取出1KG标准的砝码,系上可以忽略不计重量的绳子,挂在上夹具上,此时标准显示为9.9N,说明仪器还算正常范围内,但是还要进行标定,这是因为仪器要定期进行标定,校准。按‘标定’按键,进行标定,把标定值后的‘0’改为‘1’,然后在砝码重量下面设置为1KG,此时按‘标定’按键,再按’设定‘按键,返回主菜单,强力值显示为标定值,此时强力值标准显示应为9.8N,实际显示为9.8N,标定成功。http://ng1.17img.cn/bbsfiles/images/2014/12/201412261155_529185_2154459_3.jpghttp://ng1.17img.cn/bbsfiles/images/2014/12/201412261155_529186_2154459_3.jpghttp://ng1.17img.cn/bbsfiles/images/2014/12/201412261155_529187_2154459_3.jpghttp://ng1.17img.cn/bbsfiles/images/2014/12/201412261156_529188_2154459_3.jpg在对传感器进行标定时,传感器厂家一般推荐满量程的20%~30%以上的砝码进行标定,这样标定效果会更好,但我们只有最大1KG标准的砝码,只能用这些来进行校正5.验证用已知结果的标准样品进行验证,用来试验仪器校正的符合性5.1首先设定隔距长度,夹持试样中间部位,保证试样的纵向中心线,通过夹钳的中心线,并与夹钳钳口垂直,关闭上夹钳,靠织物的自重下垂,关闭下夹钳5.2打开连接电脑,电脑桌面找到‘电子织物强力机测试系统’,5.3在‘电子织物强力机测试系统’中选择‘参数设置’‘测试温度’20±1℃、‘测试湿度’65%±2%当审核各项参数无误时,点击‘运行’仪器开始运作,拉伸试样至断脱,测试结果和标样数据一致,仪器正常。测试完成,关闭仪器和打印机电源开关注意事项1经常保持仪器的清洁2定期在丝杆、导柱上加注机油,使仪器上升,下降传动部分呈现良好的润滑状态加注机油前需拆下老虎皮
解读传感器如何发展 传感器的出现,被誉为本世纪初高压电器制造业的一场革命。其数字化输出、网络化接线使得电网更安全、更环保、更利于一次设备乃至整个输配电系统的智能化。传感器与传统互感器相比有以下特点: 小信号传输代替大功率输出,互感器小型化、低功率化可使原先数十公斤甚至上吨的重量减小到几公斤。 光隔离代替油、气绝缘。独立式高压互感器一二次间采用光纤数字连接,光隔离代替复杂昂贵的油气绝缘系统,这是一个革命性变革,使得电压愈高,互感器的性价比愈高。 数字化输出替代模拟输出,便于后续网络连接和智能化处理,采用光纤传输,具有更强的抗电磁干扰能力。 网络数据共享代替多绕组并行接线。传感器单点测量数据可经由工业以太网传输,因而获得共享,在电站可省去大量的并行电缆。 应用情况 资料统计,我国目前大约有上百个单位从事新型传感器的试探性研发,初步形成供货能力的大约有十家左右,门类较为齐全,可全面供货的目前已经有3~5家。产品涉及10~800千伏,电流、电压、独立式、组合电器式等不同品种。 2004年起,有源传感器先于光学互感器进入市场应用,有源传感器高压侧将电流信号转换为数字信号经光纤传至地电位,像光学传感方案一样,实现了高低压之间的光隔离绝缘,加之便于工业化批量生产,已成为占主导地位的互感器种类。 同一时期,我国研发一种更加实用的“自励源”技术,从而有源式转变为一种“准无源”结构。这一方案可大幅度简化互感器,从根本上提高可靠性和寿命周期。 不久,一种适合电子式小功率分压的“等势腔”分压结构在我国出现,它具有很高的绝缘安全性和测量精度指标,因而可以替代传统依靠油、气绝缘的互感器。该技术特别适合于高压、特高压分压器结构的干式化,是一种出自我国的新型电子式电压互感器。 为了克服测量性能易受温度、震动应力的影响,目前,光学方案已经由环状磁光玻璃改进为一种光纤式传感器,使得光学方案登上了一个新的技术平台,更加接近实用要求,这类被称为光纤式的电子互感器已经有少量试用,需要进一步克服结构复杂和造价过高问题。 应用面临的主要问题 传感器改变了原有的装配应用方式,例如微电子器件被前移至户外环境的高压线、隔离刀闸、断路器等强干扰源附近,必须经受恶劣气候条件以及不规则强电磁干扰的考验,所以目前传感器研发和应用中面临的主要问题是:电磁干扰防护、通信差错控制、可靠电源方式以及适应户外环境,如果措施不当,易引发信号失效、保护误判、锈蚀老化等。 解决这些问题,我们需要尽快完善试验、检验相关标准,促进传感器下一步研发的关注点向高可靠、高稳定方向倾斜。 未来研发方向 传感无源化:由于无源传感方式具有技术优势,独立式ECT传感部件将趋向于无源化,这包括有源式传感器将通过摆脱对外源的依赖,实现自供电,走向准无源化,由此,传感器平均寿命周期将会达10年以上。 经过一系列传感器的脉理,我们熟知了传感器的发展趋势,在未来的世界里,传感器的发展,人人可以见得.[color=#fe2419][size=5]以后发帖要注意版规哦,不能有超链接!!![/size][/color]
电子拉力试验机传感器的定义和分类电子拉力试验机的精度其实主要取决于控制部分的准确性、传动部分的精确性、以及传感器的灵敏性,因此,传感器在电子拉力机试验机的整个质量体系中占据着举足轻重的低位。下面我们来正确认识一下我们常见传感器的定义和分类。电子拉力试验机传感器的分类:有各类各样的称重传感器,例如电容式称重传感器、电磁均衡式传感器,压电式称重传感器等。但由于质量不是直接丈量,而是应用质量在地球重力场中的力效应来丈量的,所以从丈量技能而论它们彼此是同类的。称重传感器能把被测质量转换成电压旌旗灯号。电子拉力试验机传感器的定义:电阻应变式称重测力传感器: 寻常糊口中,我们接触较多的物理量就有温度、湿度、质量、分量、力、压强、速度、加快度、长度、角度、液位、流量、密度等,与此相对应,生产和糊口生计中就需求温度传感器、湿度传感器、称重测力传感器、压强传感器等等。 应变式称重测力传感器与测力传感器之间的关系: 采用电阻应变片作为敏感元件制造生产的称重传感器叫应变式称重传感器。 从理论上说,质量表征实体的一种性质,其丈量单元是千克,而力学量是一种向量,丈量单元是牛顿及其它导出量,彼此毫无关系。 应变式称重传感器: 采用电阻应变片作为敏感元件制造生产的能把各类力学量转换为电量的传感器叫测力传感器。 能把被测物理量或化学量改变成为电量的一种器件或元件叫传感器(又称变换器)。例拉力、压力、压强、扭拒、加快度等传感器。 一种已思考到运用本地的重力加快度和空气浮力影响的用来丈量质量的传感器。 应变式测力传感器: 一种基于应变—电阻效应制成的,用金属箔作为敏感栅的,能把被测试件的应变量转换成电阻转变量的敏感元件称为电阻应变片。









 我要推广仪器
我要推广仪器
 下载APP
下载APP